基于能量管理的無人機無動力著陸引導策略
2015-01-08 06:04:04趙文杰
浙江大學學報(工學版) 2015年10期
關鍵詞:規劃
田 華,趙文杰,方 舟,李 平,
(1.浙江大學控制科學與工程學系,浙江杭州310027;2.浙江大學航空航天學院,浙江杭州310027)
基于能量管理的無人機無動力著陸引導策略
田 華1,趙文杰2,方 舟2,李 平1,2
(1.浙江大學控制科學與工程學系,浙江杭州310027;2.浙江大學航空航天學院,浙江杭州310027)
針對小型固定翼無人機在空中發生推進系統故障的緊急情況,研究基于能量管理的無動力著陸引導策略.在質點動力學分析的基礎上,結合無人機的可飛包線及能量走廊定律,提出基于高度和待飛距離的動壓在線規劃方法.考慮到該在線規劃方法對模型的依賴性,針對無人機氣動參數存在不準確性的問題,將反饋控制的思想引入動壓剖面的實時修正過程.在固定翼無人機飛行仿真平臺上對上述方法進行半實物實驗驗證.仿真數據顯示,當氣動模型不準確時,采用有控制介入的在線規劃方法可以快速地將期望動壓規劃至最優解,從而顯著地提高著陸精度.結果表明,采用研究的著陸引導策略能夠有效地實現無人機的無動力自主穩定著陸.
無人機(UAV);能量管理;動壓規劃;反饋調節;著陸引導
近年來,無人機的飛行安全問題受到廣泛關注,推進系統故障是無人機飛行中最常出現的特情之一,對飛行安全構成了極大的威脅.美國于2006年通過遠程遙控實現“全球鷹”的無動力迫降是為數不多的成功案例[1].對于高空、高速無人機而言,由于任務半徑大,覆蓋范圍廣,很難確保飛行區域絕對空曠.為了實現無人機的安全回收,精確的著陸引導技術至關重要.
能量管理是將無人機引導至末端著陸窗口的關鍵技術,核心思想是通過規劃飛行剖面控制無人機機械能的轉化.動力系統故障后,無人機不再具備能量輸入,能量管理的目標是通過調整能量轉化規律間接地控制飛行距離.當初始能量不足時,無人機的下滑高度和時間有限,如何充分利用初始能量使滑翔距離最大化是能量管理的主要目標.Tong等[2-3]采用遺傳算法和基于時標分離的奇異攝動理論規劃無人機最優路徑,充分拉長無人機滑翔距離;Rogers[4]通過實驗證明否定了最大升阻比飛行即最遠射程的觀點,提出了210°調航向的水滴型路徑和最少高度損失的恒定滾轉角轉彎的飛行策略;David在文獻[4]的基礎上進行擴展,提出非恒定機動飛行策略,優化了最遠射程[5].在初始能量過剩時,如何在有限的待飛距離內充分地消耗余能是能量管理的主要目標,通常傾向于利用橫側向運動軌跡增加能量的消耗,“Dubins曲線”作為無人機滑翔路線的規劃方法被廣泛采用[6-8],Horneman等[9]提出“HAC轉彎”算法,巧妙地銜接了初末狀態的過渡,并有效地增加了無人機的實際飛行航跡.上述方法都只是通過拉長滑翔距離提高能量消耗的總量,并未充分利用能量消耗率的可控性.Barton等[10]提出根據初末能量規劃軌跡以調整滑翔距離的方法,但其能量的控制需要依靠減速板完成,對于不具備減速板的小型無人機并不適用,且討論未涉及無動力定點著陸技術.
本文借鑒了能量管理思想[11],針對小型固定翼無人機的特點,提出基于能量管理的無動力著陸引導方案.該方法通過調節無人機的動壓控制能量轉換.本文首先研究了無人機在無動力情況下的質點動力學方程,結合不同動壓剖面的仿真實驗分析無動力下滑時的能量消耗規律,提出一種根據當前飛行高度和待飛距離的在線動壓規劃方法;其次,針對無人機氣動模型的不準確性,采用反饋控制思想對動壓剖面進行實時調整,以提高著陸的準確性.最后,在無人機仿真平臺上對上述方法的有效性進行驗證.
1 能量管理策略
對于動力系統發生故障的無人機,其下滑過程為自身能量的消耗過程.由于不具備能量輸入,再加上空氣阻力的作用,在滑翔過程中,無人機的機械能不斷減少,著陸位置與能量的消耗率密切相關.由于故障發生時無人機的位置和能量儲備具有不確定性,對于能量儲備大、待飛距離近的情況,很容易造成無人機滑過指定著陸點,而對于能量儲備小、待飛距離相對遠的情況,無人機可能不具備滑至著陸點的能力.對無人機的能量進行合理地管理和控制,適當地調整動能和勢能的轉化和消耗,是研究的核心問題.無人機的能量轉化與飛行軌跡密切相關:在初始高度固定的情況下,下滑軌跡的傾斜角越小,能量的消耗率越小,滑翔距離越遠,反之亦然.能量管理的主要策略是通過規劃合理的飛行軌跡來調節能量消耗率,從而使無人機抵達著陸場時具備良好的著陸條件,以實現準確的著陸引導.
1.1 能量走廊
能量走廊[11]定義了無人機無動力著陸引導的可執行范圍,是能量管理的一個約束條件.它可以通過計算獲得,并在著陸引導問題中用來決定飛行剖面.圖1給出能量走廊的示意圖.
圖1中,最陡下滑剖面和最大升阻比下滑剖面定義了能量可管理區域的邊界,初始能量在該區域時,可以通過能量管理策略實現著陸引導.對于同樣的待飛距離,若無人機具備比最陡下滑剖面更高的能量,則可以稱為“能量過剩”,此時無法單純通過簡單的縱向軌跡規劃來實現無人機精確的著陸,需要增加橫側向運動以消耗多余的能量.反之,若無人機只有比最大升阻比下滑剖面更少的能量,則無人機不具備滑翔至預定著陸點的能力,唯一的辦法是選取其他可行的著陸點.通常在飛行區域內會根據飛行任務航線設置一個主著陸點和兩個備用著陸點,這些著陸點要盡量覆蓋到無人機的全部飛行軌跡,使無人機在任意位置都可以有合適的點完成無動力著陸引導.本文只討論初始能量在能量走廊可管理區域內部的情況.
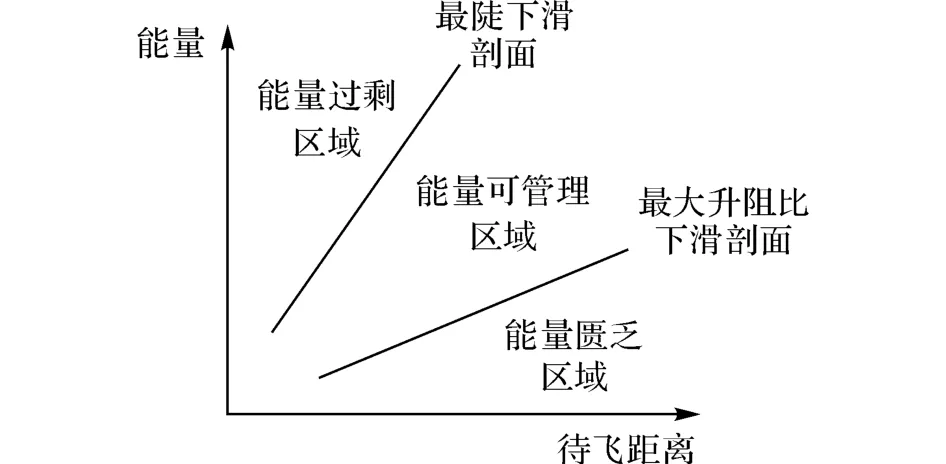
圖1 能量走廊Fig.1 Energy profiles
1.2 能量消耗率
假設無人機的質量為m,重力加速度為g,飛行的海拔高度為h,飛行速度為v,則無人機每單位重量所攜帶的機械能總量可以表示為

能量隨水平飛行距離R的變化為

在無動力的情況下,無人機的質點動力學方程沿速度方向、側向和速度法向可以分解為
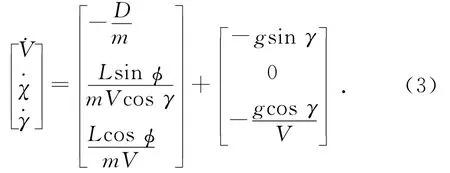
式中:γ為航跡傾斜角,通常為負值;D和L分別為無人機的氣動阻力和升力,可以表示為

其中,CD和CL分別為阻力系數和升力系數,Sw為有效機翼面積,Q為無人機動壓,Q=0.5ρv2.ρ為標準大氣密度,ρ=ρ0exp(-ch).由于
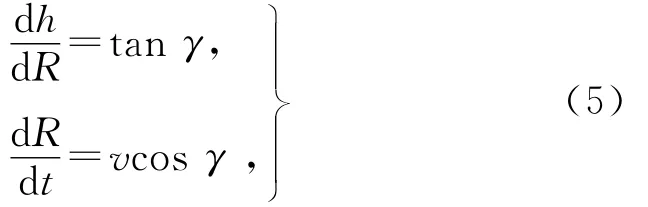
將式(3)~(5)代入式(2),則能量消耗率可以表示為

由式(6)可以發現,能量消耗率只與CD、Q和γ有關.對于不具備減速板的小型無人機,只能通過調節俯仰角來實現對Q的控制,而無動力下滑時CD由Q唯一確定,因此一個給定的動壓剖面唯一確定了航跡傾斜角剖面.可見,能量消耗率完全由動壓剖面決定,即根據無人機狀態選擇合適的動壓剖面是解決著陸問題的關鍵.
2 動壓剖面的在線規劃
2.1 不同動壓下無人機的下滑規律
已知無人機的初始海拔高度和著陸海拔高度,若給定無人機飛行過程中動壓變化剖面,則水平滑行距離是唯一確定的.假設無人機從推進系統故障時刻開始以一個恒定的動壓Qc開始下滑,則下滑速度可以表示為

速度的微分可以寫作

結合質點動力學方程(3),可得

在下滑過程中,無人機的水平滑翔航跡Rs可以
表示為下面的積分形式:
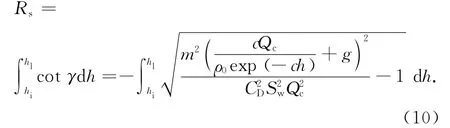
忽略式(10)中的小項cQc/(ρ0exp(- ch) ),因為它通常遠小于g,則式(10)可以簡化為
式(11)表明,給定著陸場海拔高度(本文假設hl=0 m),Rs與初始高度hi成線性關系.隨著Qc的變化,該直線的斜率隨之改變.
在MATLAB/SIMULINK環境下搭建某型固定翼無人機的數字仿真平臺,對不同動壓下的滑翔軌跡進行仿真實驗.圖2給出Rs與hi和Qc之間的關系,如圖3所示為無人機以不同動壓下滑時γ隨hi的變化曲線.由圖3可見,當無人機保持動壓恒定下滑時,Rs-hi曲線可以近似為一條直線,這與式(11)得到的結果相吻合.隨著動壓的增大,航跡傾斜角的絕對值逐漸增大,Rs-hi直線的斜率亦隨之增大.可見,無人機下滑時設定的動壓越大,滑翔的總水平距離越短.
實驗結果顯示,動壓為2000kg/m/s2的曲線未遵循上述規律,原因為過小的動壓設定使無人機須以較大的迎角滑行,如圖4所示.圖中,α為迎角.
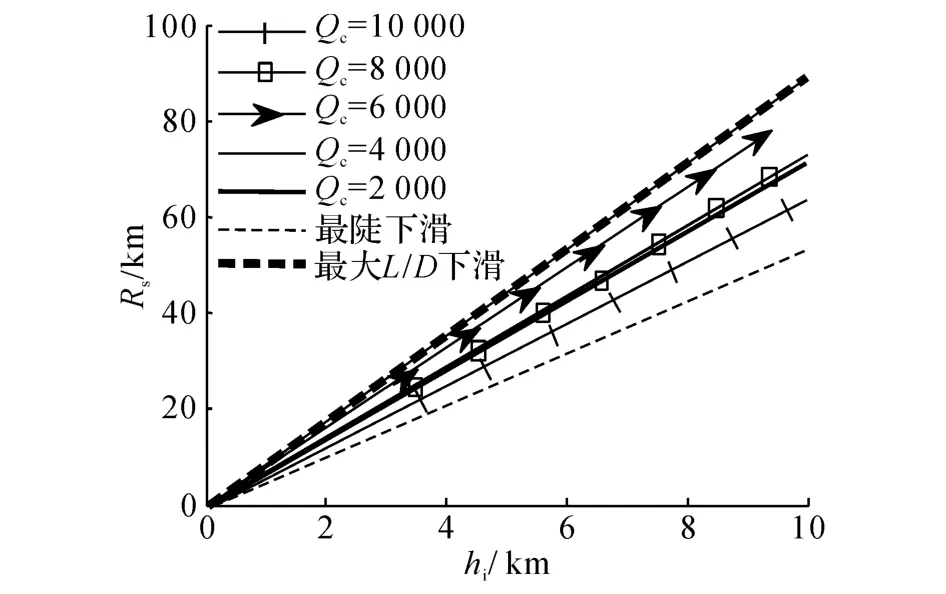
圖2 不同動壓下水平飛行距離與初始高度的關系曲線Fig.2 Curves of horizontal gliding distance and initial height on various DPs
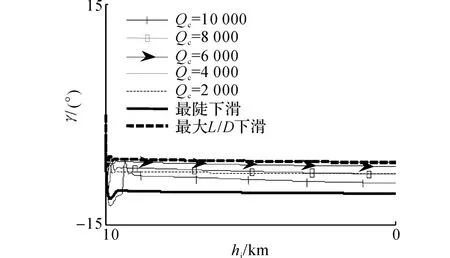
圖3 不同動壓下航跡傾斜角隨高度變化曲線Fig.3 Curves of gliding angle and height on various DPs
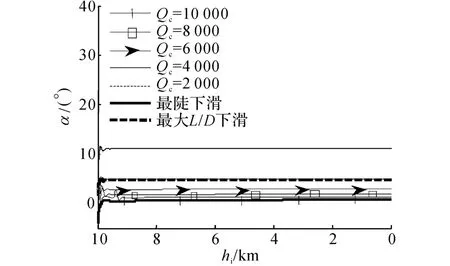
圖4不同動壓下迎角隨高度變化Fig.4 Curves of attack angle and height on various DPs
固定翼無人機在α較小時,升力隨迎角的增大而增大,但是當迎角超過一定值時,升力系數急劇減小,無人機不再具備足夠的氣動升力來保持期望的軌跡,因此失去了遠距離滑翔的能力.結合無人機的飛行能力和氣動特性,可以得到動壓剖面的邊界,即最陡下滑剖面和最大L/D下滑剖面,如圖2所示.在該邊界內飛行的無人機均可以平穩、安全地著陸.
2.2 不同動壓下的能量消耗規律
以著陸點為原點,無人機到著陸點的水平距離(即待飛距離)為x軸,無人機總能量為y軸,建立坐標系.能量隨待飛距離的變化曲線,如圖5所示.
圖5所示的能量變化曲線與圖1的能量走廊較吻合.對于相同的待飛距離(distance to go,DTG),初始能量E越充足,無人機在下滑過程中需要保持更大的動壓,以提高能量消耗率;相反,初始能量越貧乏,則應盡可能保持較低的動壓,以盡量降低能量消耗率.若初始能量超出圖5所示的最陡下滑剖面的能量,則必須通過增加橫側向軌跡來消耗過剩的能量;若初始能量低于最大L/D下滑剖面所給出的能量,則無人機將不具備滑翔至指定著陸場的能力,只能選取其他備用著陸場.
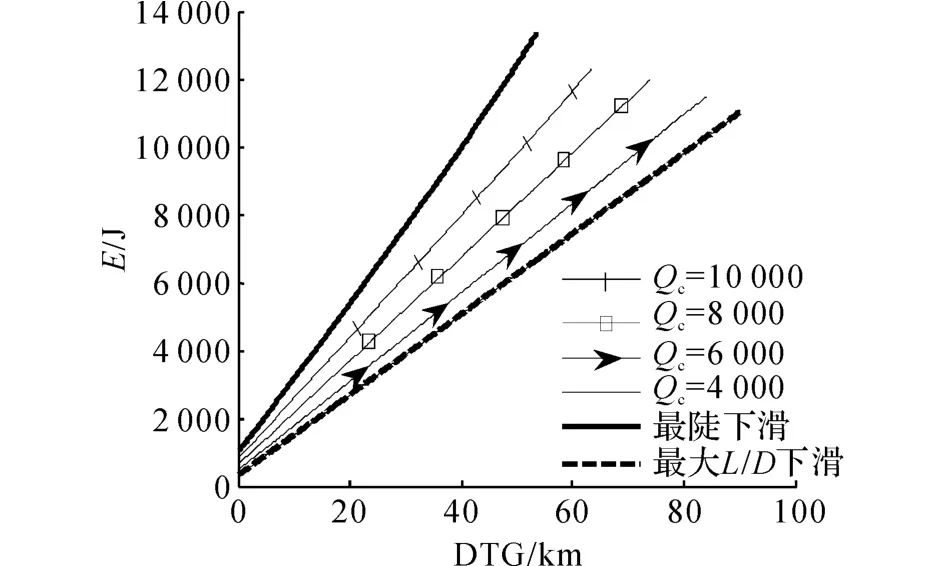
圖5 不同動壓下的能量消耗規律Fig.5 Energy consuming law on various DPs
2.3 動壓控制
由于動壓只與大氣密度和飛行速度有關,而大氣密度由當前的飛行海拔高度決定,動壓控制可以看作飛機的縱向運動控制.縱向運動的控制量通常有2個,即升降舵和油門桿.當動力系統故障時,油門桿不再起作用,只可以通過升降舵的偏轉改變俯仰角,從而實現動壓的控制.如圖6所示,θ為俯仰角,下標cmd表示設定值,δe為升降舵偏角.控制器結構采用串級控制,縱向的內反饋回路為俯仰角控制,俯仰角的設定值由外反饋回路給出.橫航向的控制采用標準的“航線保持”控制,內反饋回路為橫滾角控制,如圖7所示.圖中,φ為橫滾角,δa、δr分別為副翼和方向舵偏角,[X,Y]為無人機的實際位置坐標,L為航線信息.
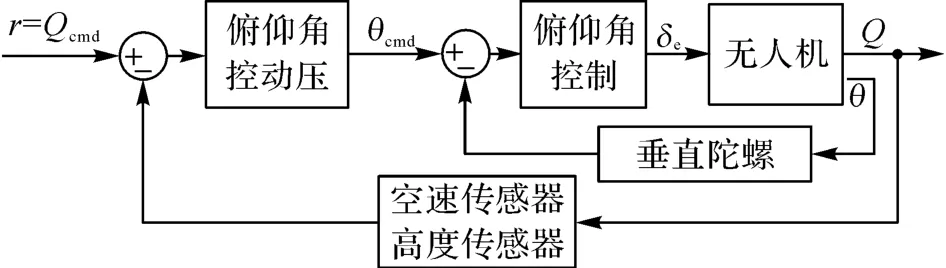
圖6 動壓控制結構Fig.6 DP control structure
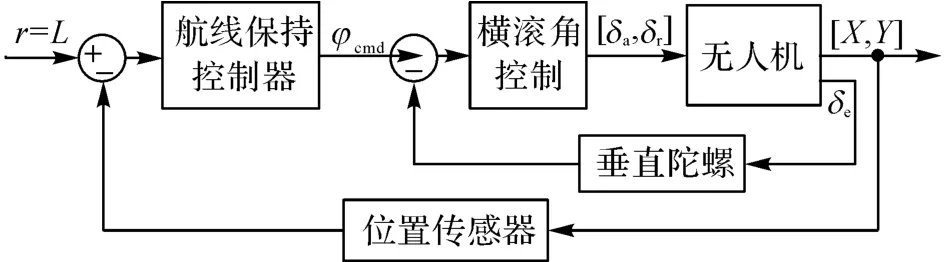
圖7 橫向控制結構Fig.7 Lateral control structure
2.4 在線規劃策略
如2.1和2.2節所述,無人機的推進系統發生故障后,無人機的能量可以通過調節下滑動壓來控制.根據上文分析,結合式(11),有

式中:h和DTG分別為通過實時測量計算得到的高度和待飛距離.求解上述關于Qcmd的式(12),能夠得到任意狀態下無人機的期望飛行動壓.
假設已知的測量參數足夠精確,同時忽略外界一切干擾,只要無人機始終以故障發生初始時刻計算所得的期望動壓值Qcmd0飛行,就可以準確地實現無人機的著陸引導.在整個下滑過程中,飛行動壓恒定意味著在空氣密度較小的高空,無人機的期望飛行速度大,而在空氣密度較大的低空,期望速度小.該規劃方法完全遵循了無人機在不同高度下的飛行速度包線,因為在高空時若無人機飛行速度過小將產生較大的迎角,容易導致失速;在低空時無人機即將著陸,過大的速度不符合著陸要求.綜上所述,利用動壓來規劃下滑航跡的方法既保證了無人機的安全飛行,又實現了高度和速度的漸進引導,最終在到達預定著陸點時滿足回收條件.
在實際飛行中,來自無人機內部和外部的干擾都會影響無人機的飛行軌跡,因此設計一種動壓的在線規劃方法引導無人機實現無動力著陸.
在線規劃策略如下.
1)初始化.以故障發生時刻為初始狀態,無人機的初始高度h=hi,初始待飛距離DTG=DTG0.
2)更新.選擇在線規劃周期為50 ms.無人機以該周期根據式(12)實時規劃和更新期望飛行動壓Qcmd.無人機通過動壓控制、跟蹤期望動壓.
3)結束.當無人機達到著陸條件時,結束在線規劃過程,進入末端著陸控制.
3 基于反饋控制的動壓在線修正
上述動壓在線規劃策略在一定程度上依賴于無人機氣動模型的準確性.本文的研究對象,即某型固定翼無人機,氣動參數系通過縮比模型的風洞試驗和氣動計算得到,存在一定程度的不準確性,因此,式(12)中的系數是不可信的.觀察式(11)可知,最可能引起Rs-hi關系式不準確的參數為阻力系數CD.表1列出了風洞試驗給出的幾個動壓對應的CD.
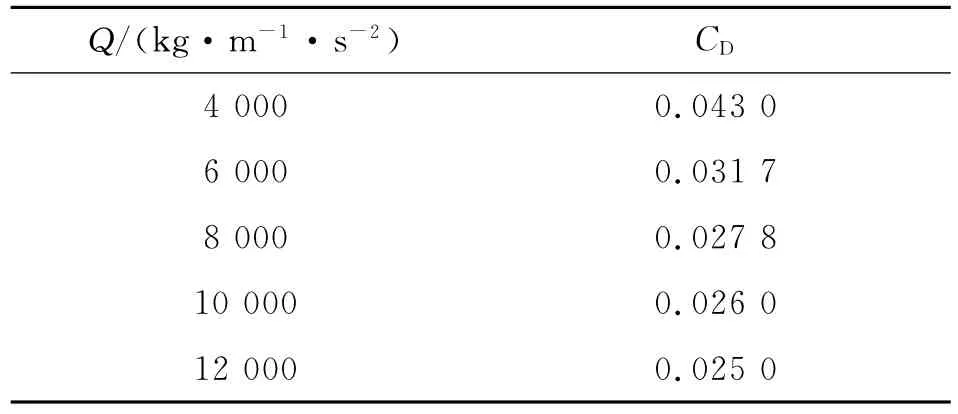
表1 不同動壓下的阻力系數Tab.1 Drag coefficients on various DPs_______
假設風洞試驗給出的CD與真實值存在一定的誤差,且攝動范圍為[-30%,30%].通過實驗證明,不準確的模型導致無人機著陸時與預定著陸點存在較大的距離,仿真曲線將會在下文給出.針對該情況,在規劃過程中加入反饋控制結構,對式(12)進行實時修正.
本文借鑒了反饋控制的思想設計控制系統,結構如圖8所示.
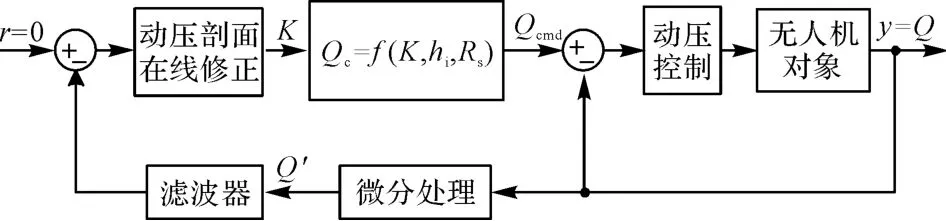
圖8 反饋控制結構Fig.8 Feedback control structure
該控制系統的工作機理如下.
1)根據當前能量信息、待飛距離與預先得到的動壓剖面,可以計算出一個動壓的設定值Qcmd(k).
2)針對無人機對象,采用“俯仰角控動壓”控制器,通過調節俯仰角來跟蹤動壓設定值Qcmd(k).
3)將無人機動壓狀態量通過微分處理和濾波處理得到˙Q.
4)將˙Q作為控制變量,令參考輸入為0,設計PI控制器.只要˙Q不為零,則說明預先估計的動壓剖面不準確,需要根據控制器的輸出K來修正動壓剖面的參數.
5)根據新的動壓剖面和實時的能量信息、待飛距離來計算新的動壓設定值Qcmd(k+1),再通過動壓控制器調節無人機的飛行動壓.
4 仿真驗證
4.1 實驗設計
半實物仿真實驗是在MATLAB/SIMULINK環境下基于一個已知的固定翼無人機模型搭建實現的,選用的飛控計算機以DSP+FPGA為基本架構,DSP處理芯片為TMS320C6713.實驗設計如下.無人機以某速度在某高度飛行時,推進系統故障,發動機停車,此時飛控系統立即進入能量管理模式.為了驗證反饋控制結構介入的有效性,在不同高度、不同速度下采用10組不準確的CD擬合CD-Qc關系式,分別以無控制介入的動壓在線規劃策略作為對比實驗,說明在線修正動壓剖面的必要性和有效性.
4.2 實驗結果與分析
飛控計算機的內環控制周期為10 ms,在線修正周期為50 ms,經試驗可知,本文提出的動壓規劃計算程序的單次計算時間不大于1 ms,在飛控計算機實驗平臺上可以實現動壓剖面的實時規劃.圖9 和10展示了一組對比實驗的結果.圖中,細虛線為標稱動壓剖面,粗虛線為參數CD不準時無控制介入的動壓在線規劃仿真結果,粗實線為加入反饋控制的在線動壓規劃仿真結果.
由圖9、10可見,沒有動壓剖面修正的規劃策略給出的動壓設定值在整個下滑階段不斷增大,從5000kg/(m·s2)增加至12000kg/(m·s2),這說明當動壓剖面估計不準時,在線規劃所得的動壓設定值與實際需要的飛行動壓有較大差異,因此每個更新周期給出的動壓與上一周期相比,均有明顯的改變.雖然在整個滑翔過程中,在線規劃策略始終以固定的頻率重新規劃動壓剖面,但總是基于不準確的氣動參數,且沒有根據實際飛行狀態進行調整,所以不能實現精確的著陸引導.在加入動壓剖面修正后,在線規劃算法給出的動壓設定值會快速收斂到最優值,保證無人機以穩定的動壓滑行至指定著陸點.表2列出了10組仿真對比實驗中,無人機實際著陸點與期望著陸點的位置關系.
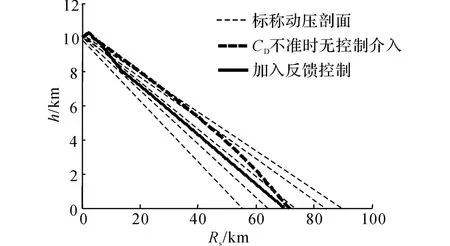
圖9 在線規劃飛行航跡Fig.9 Flight path of on-line programming
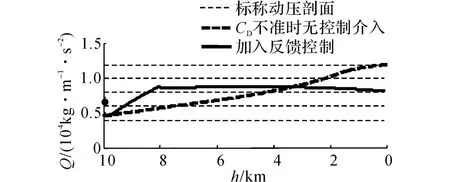
圖10 在線規劃的動壓隨高度變化曲線Fig.10 Curves of on-line programming DP and height
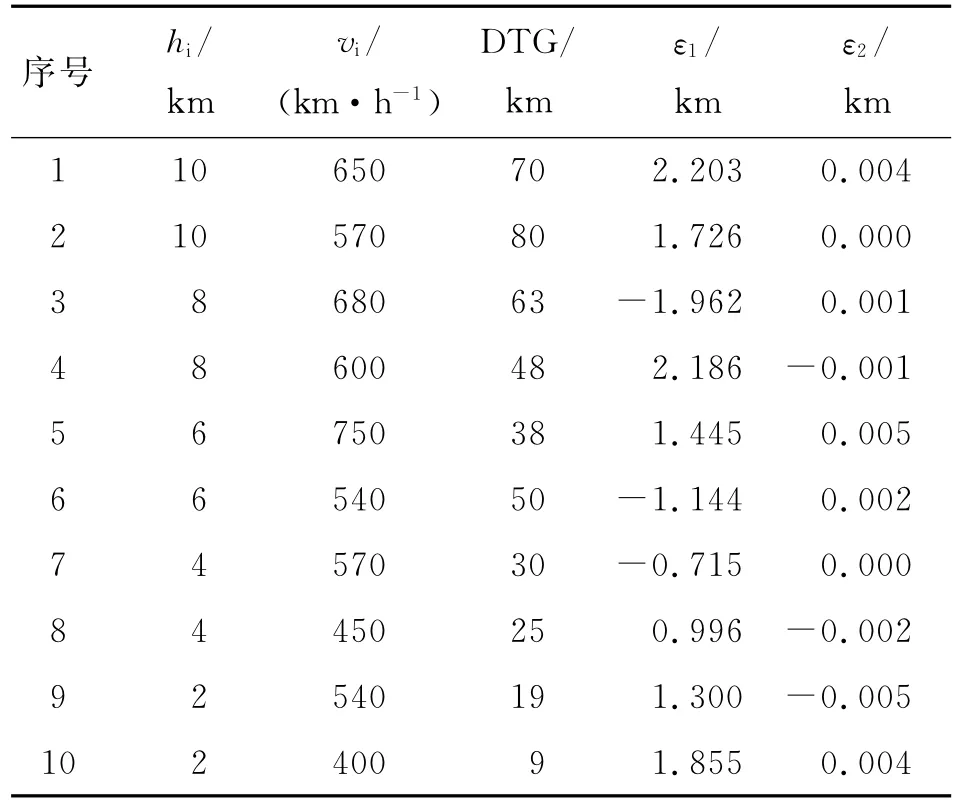
表2 著陸位置對比Tab.2 Comparison of landing positions
表2中,ε1為無動壓剖面在線修正時無人機滑翔后的著陸精度,ε2為加入在線修正后無人機的著陸精度.ε為正值,表示無人機滑翔超過期望著陸點;ε為負值,則表示未達到期望著陸點.表2的數據顯示,無在線修正策略時,無人機著陸點會偏離預置著陸點較遠的距離,氣動參數不準導致動壓剖面估計不準這一問題不可忽視;在有控制介入的規劃策略的作用下,無人機最終的著陸點與期望著陸點的誤差可以精確到5 m以內.這是因為通過反饋控制對動壓剖面施加在線修正的規劃策略,最終會得到一組相對準確的動壓剖面,從而找到與當前高度和待飛距離相應的動壓期望值,并保持該動壓下滑直至進入著陸窗口.可見,在氣動參數不準確的情況下,采用基于在線反饋調節的動壓實時規劃方法可以保證無動力著陸的準確性.
5 結 語
本文面向小型固定翼無人機,提出基于能量管理的無動力著陸引導方法.結合動力學分析和某型無人機的氣動模型,對無動力下滑過程中的能量消耗規律進行理論探索和仿真實驗,基于理論分析和實驗結果,提出動壓剖面的在線規劃方法.此外,考慮到氣動模型的不準確性,將參數反饋調節的思想引入動壓規劃過程,以充分利用動壓期望值的動態變化來反饋修正剖面參數,從而提高著陸的準確性.仿真結果表明,以動壓作為控制目標的規劃方法可以將無人機安全、平穩地引導至著陸窗口,且在初始能量在能量走廊內部的情況下,基于在線反饋調節的動壓實時規劃方法可以有效地抑制模型參數的不準確性對著陸過程的影響,從而保證著陸的控制精度.
對于無人機初始能量過剩的情況,可以將動壓規劃與橫側向規劃相結合,以充分發揮待飛距離的可控性.圍繞該問題可以進行更深入的研究和探討.
(
):
[1]WALBY E,LOGAN M,PERRY J.Global Hawk support to homeland security operations[C]∥Collection of Technical Papers-AIAA 3rd“Unmanned-Unlimited”Technical Conference,Workshop,and Exhibit.Chicago:[s.n.],2004:170-173.
[2]TONG P,BIL C,Galanis G.Genetic algorithm applied to a forced landing manoeuvre[C]∥Congress of the International Council of the Aeronautical Sciences.Yokohama:[s.n.],2004:1-13.
[3]SHAPIRA I,BEN-ASHER J.Range maximization for emergency landing after engine cutoff[J].Journal of aircraft,2005,42(5):1296-1306.
[4]ROGERS D F.Possible‘impossible’turn[J].Journal of Aircraft,1995,32(2):392-397.
[5]HYDE D C.Minimum-altitude-loss gliding turns with terminal constraints(return to runway after engine failure)[C]∥2005 AIAA Atmospheric Flight Mechanics Conference and Exhibit.Monterey:AIAA,2005:1-17.
[6]ATKINS E M,PORTILLO I A,STRUBE M J.Emergency flight planning applied to total loss of thrust[J].Journal of Aircraft,2006,43(4):1205-1216.
[7]KIM S,SILSON P,TSOURDOS A.et al.Dubins path planning of multiple unmanned airborne vehicles for communication relay[J].Proceedings of the Institution of Mechanical Engineers,Part G:Journal of Aerospace Engineering,2011,225(1):12-25.
[8]MEJIAS L,ENG P.Controlled emergency landing of an unpowered unmanned aerial system[J].Journal of Intelligent and Robotic Systems,2013,70(1/2/3/4):421-435.
[9]HORNEMAN K R,KLUEVER C A.Terminal area energy management trajectory planning for an unpowered reusable launch vehicle[C]∥AIAA Atmospheric Flight Mechanics Conference and Exhibit.Providence:AIAA,2004:5-9.
[10]BARTON G H,TRAGESSER S G.Autolanding trajectory design for the X-34[C]∥AIAA Atmospheric Flight Mechanics Conference and Exhibit.Portland:AIAA,1999:9-11.
[11]MOORE T E.Space shuttle entry terminal area energy management[M].[S.l.]:NASA,1991.
Guidance strategy of unpowered landing based on energy management for unmanned aerial vehicle
TIAN Hua1,ZHAO Wen-jie2,FANG Zhou2,LI Ping1,2
(1.Department of Control Science and Engineering,Zhejiang University,Hangzhou 310027,China;2.School of Aeronautics and Astronautics,Zhejiang University,Hangzhou 310027,China)
A guidance strategy of landing for engine-failed small-scaled fixed-wing unmanned aerial vehicle(UAV)was analyzed based on energy management.An on-line dynamic pressure(DP)programming method based on altitude and distance to go(DTG)was proposed considering the safe flight envelope and energy profiles’law for UAVs based on analyses for particle dynamics.In view of the dependence of the method upon the UAVs’model,the idea of feedback control was introduced to revise the DP profiles in real-time aiming at aerodynamic parameters’inaccuracy.Semi-physical simulations were designed and implemented on a fixed-wing UAV’s flight experiment platform.Data show that the on-line programming method with intervention of control can quickly lead the expected DP to the optimal value,and the precision of fixed-point landing can be significantly improved.The landing guidance strategy can effectively achieve unpowered landing autonomously and stably.
unmanned aerial vehicle(UAV);energy management;dynamic pressure programming;feedback regulation;landing guidance
V249
A
1008-973X(2015)10-1999-08
2014-10-28.浙江大學學報(工學版)網址:www.journals.zju.edu.cn/eng
國家自然科學基金資助項目(61004066).
田華(1988—),女,博士生,從事無人機建模、控制與仿真的研究.E-mail:htian@iipc.zju.edu.cn
方舟,男,副教授.ORCID:0000-0002-4119-3377.E-mail:zfang@zju.edu.cn
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
