巡線機器人無動力下坡速度控制方法
2015-01-08 06:03:16吳功平楊守東楊智勇
浙江大學學報(工學版) 2015年10期
胡 健,吳功平,王 偉,楊守東,劉 明,楊智勇,何 緣,郭 磊
(1.武漢大學動力與機械學院,湖北武漢430072;2.國網吉林省電力有限公司白山供電公司,吉林白山134300)
巡線機器人無動力下坡速度控制方法
胡 健1,吳功平1,王 偉1,楊守東2,劉 明2,楊智勇1,何 緣1,郭 磊1
(1.武漢大學動力與機械學院,湖北武漢430072;2.國網吉林省電力有限公司白山供電公司,吉林白山134300)
為了提高高壓輸電線路巡線機器人續航能力以及降低能量消耗,結合能耗制動與脈寬調制方法,提出巡線機器人無動力下坡控速方法.該方法通過調節能耗電路通斷占空比來定量調節能耗電阻消耗功率,實現下坡過程中的速度控制.設計基于線路模型的無動力下坡條件判斷策略,采用變論域模糊控制方法實現速度的準確控制,使得機器人在巡檢過程中全自主運行.在室外模擬線路和實際輸電線路中進行試驗驗證.結果表明,采用該方法能夠有效地控制機器人無動力下坡運行,可以節省12%的能量消耗.
高壓輸電線路;巡線機器人;能耗控速;模糊控制
巡線機器人[1-2]是實現電力系統巡檢作業自動化的重要工具之一,機器人可代替工人執行繁重巡線工作,并可巡檢工人不易到達的跨越山區、江河湖泊以及原始森林的檔段.在巡線機器人領域中,能耗問題是影響巡檢里程及時間的關鍵技術問題,目前主要利用載流線路電磁感應原理的取電方法來補充電能[3-4].該方法局限于沿導線巡檢的機器人,并且裝置重量較大,感應取得電量有限.在節電方法中,主要研究為優化機械結構及控制算法,沒有針對線路結構的節能方法研究.
大部分高壓輸電線路是典型的懸鏈線結構[5-6],在相鄰兩塔之間線路表現為先下坡,后上坡.在巡線機器人下坡巡檢階段切斷蓄電池對行走電機及驅動器的供電,使機器人由重力驅動下坡的方法稱為巡線機器人無動力下坡方法.
巡線機器人無動力下坡能夠節省巡線機器人下坡狀態下電機及驅動器的電能消耗,但是此時行走電機速度將不可控,當速度過高時,會造成電機損壞,并且可能使機器人高速碰撞防震錘而損傷機器人、線路及金具.無動力下坡雖然能夠利用線路結構特點減少能耗,但沒有完善的控速方法,將會對機器人巡檢造成重大的安全隱患.
針對以上問題,本文采用下坡段在電機回路串入能耗電阻的方法控制速度.直流電機能耗制動的重要用途之一是實現迅速停機,該方法在電機轉速較高時降速效果尤為明顯,但一般僅用于制動,無法達到實時控制速度的目的.本文結合脈寬調制控制方法[7-8],可以定量地控制能耗電阻的消耗,并提出基于線路模型的下坡條件判斷策略與針對普通模糊算法的不足,設計了變論域模糊控制器[9-11],實現了無動力下坡中快速、智能、準確的速度控制,為今后與回饋制動技術結合創造了安全、可靠的環境.
1 巡線機器人線路工況及能耗控速系統
1.1 巡線機器人線路工況
如圖1所示為巡線機器人工況圖,檔段間省略了懸垂線夾到防震錘之間的較短的距離(1~3 m),防震錘之間為線路無障礙路段,長度由數百米到幾千米不等.由于絕大部分線路呈懸鏈線結構,巡線機器人在跨越桿塔之后的行駛軌跡基本為先下坡,后上坡.為了保證可控性,機器人全程采用驅動器驅動行走電機運動.巡線機器人上坡與下坡交替的工況是實現無動力下坡前提條件.

圖1 巡線機器人工況圖Fig.1 Diagram of inspection robot working condition
1.2 能耗控速系統結構
如圖2所示為機器人能耗系統拓撲結構.系統由驅動部分與能耗控速部分兩部分組成.前者按照能量傳輸方向依次由蓄電池、電源模塊、驅動器、切換電路、直流電機組成,用于需要驅動器控制電機的場合;后者按照能量傳輸方向,依次由直流電機、切換電路、脈寬調制控制器、能耗電阻組成,在無動力下坡時實現機器人的速度控制.

圖2 能耗控速系統結構Fig.2 Structure of energy-consumed speed control system
1.3 能耗電阻的選型
能耗電阻阻值是無動力下坡速度控制的關鍵參數,直接影響控制效果及控速的范圍,選型時按照最大控速坡度要求及速度要求等參數進行計算.巡線機器人無動力下坡狀態的受力分析如圖3所示.
在下坡狀態下,行走電機串聯作為發電機工作,轉變成能耗系統電源,由于通過電機的電流相同,可以認為在電機釋放狀態下,前輪與后輪受電機的制動力矩情況相同.
將重力G分解為2個行走輪中心的G1、G2,這兩個分力分別對O1、O2點產生驅動巡線機器人前進并使得行走輪滾動的力矩MG1、MG2,兩者之和為

式中:θ為線路傾角,m為機器人質量,r為行走輪半徑,MG為驅動機器人行走力矩.電機產生力矩為阻力距,MG輸入電機的力矩為

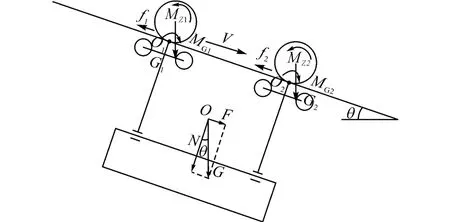
圖3 巡線機器人無動力下坡受力分析Fig.3 Force analysis of unpowered downhill of inspection robot
式中:ηr為減速器效率,i為減速器減速比.行走輪與導線之間的滾動摩擦較小,將滾動摩擦忽略不計.
巡線機器人要求控制最快速度為V,折算成電機轉速為n,則電機輸入轉矩做功為

式中:ηM為電機效率.
若要控制電機速度保持在n不變,則必須使電機輸入與輸出達到平衡,能耗電阻消耗功率為

式中:U為電機產生的感應電動勢,R為能耗電阻,Ri為電機內阻.
在直流電機中,U與轉速n存在如下關系:

式中:kn為速度常數.
當輸入輸出平衡時,P=u PR,其中u為PWM波占空比,則有

若巡線機器人要求能耗制動的最大坡度為θmax,控制器能夠實現的最大占空比為umax,在指定控制速度下,則必須滿足:

結合式(1)、(2)、(5)、(7)以及直流電機規定的額定電流限制,可得

式中:nmax為需控制的最大轉速,Ie為電機額定電流.
2 基于線路模型的無動力下坡條件判斷策略
無動力下坡能耗控速方法對輸電線路坡度有一定的要求,當坡度大于能耗控速系統可控制的線路角度時,能耗控速系統將不能提供足夠的制動力矩阻止機器人加速.此外,若桿塔之間全部或者絕大部分處于下坡狀態(部分桿塔全程下坡,對側桿塔懸垂線夾倒掛),則機器人將以較快的速度碰檢另一側桿塔防震錘,也會對機器人的機械結構造成一定的損傷.在無動力下坡過程中,可以通過編碼器獲得機器人速度信息,并通過積分求得檔段已行駛線長.據此,可以根據已給出的桿塔信息建立數學模型,結合編碼器信息可得機器人在線路中的位置及角度信息.
針對線路懸鏈狀的結構特征,常使用的曲線公式有懸鏈線公式、平拋物線公式和斜拋物線公式[5].懸鏈線公式較精確,但是涉及雙曲線函數,計算繁瑣;平拋物線公式只適用于懸掛點高差較小的情況,有很大的局限性;斜拋物線為懸鏈線公式分析的簡化方法,在工程實際中能夠滿足精度的要求.綜合比較,本文采用斜拋物線公式作為架空地線的數學模型.
如圖4所示為架空地線模型圖.圖中,A、B分別為懸鏈線懸掛點.以懸點A作為坐標原點建立平面坐標系,如圖5所示,有斜拋物線公式:

式中:l為水平檔距,h為兩懸點的高差,B點高于A為正,β為過兩懸點的直線與水平線的夾角,γ為線路比載,σ0為水平應力或最低點的應力.

圖4 架空地線的模型圖Fig.4 Model of overhead ground wire
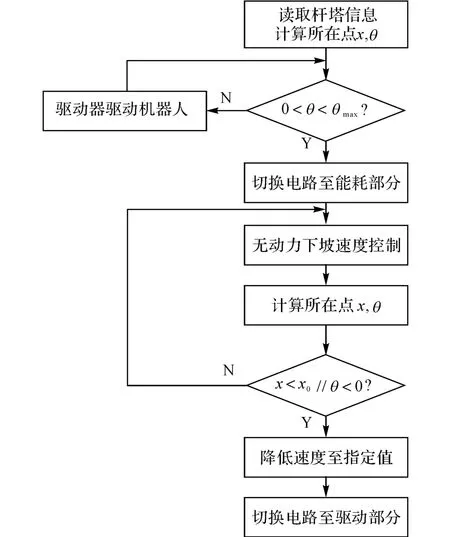
圖5 無動力下坡條件控制算法Fig.5 Condition judgment algorithm of unpowered downhill
由圖4可知,懸點A(xA,yA)的坐標為(0,0),懸點B(xB,yB)的坐標為(l,h).
對于地線上任意一點C(x,y),斜率y'為
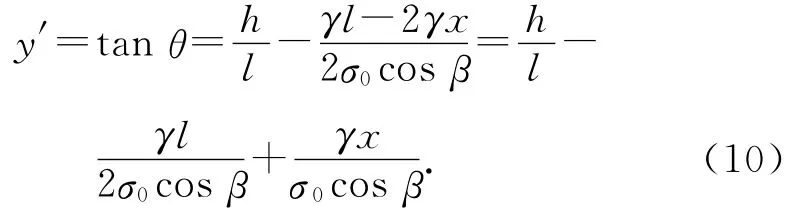
式中:θ為地線上任意一點的坡度.
距A點線長L可由弧長微分公式積分求得
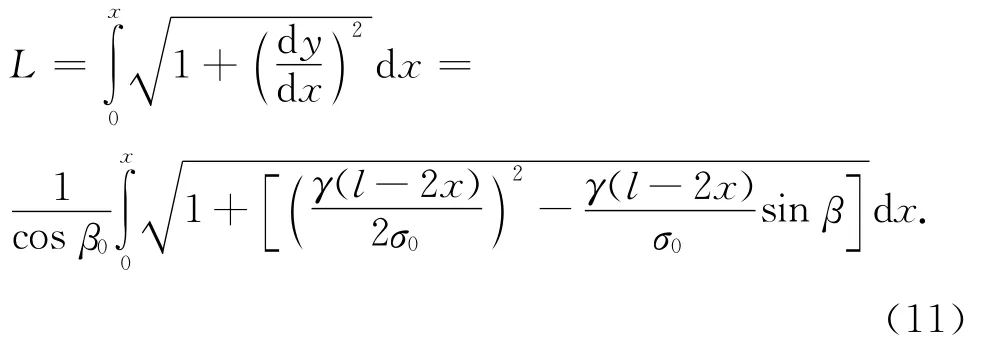
對式(11)進行簡化求解,可得
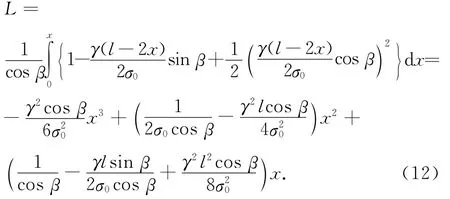
式中:L可由編碼器速度積分得出,在控制器內部算法中采用截距法可以求得一元三次方程組x的數值,在根的選取方面,選擇小于該點長度L的最近正值,定為機器人所在位置的橫坐標,求解方法的細節此處不予詳解.
線路最低點O(xO,yO)的斜率y'為0,通過式(10)可得

最低點O(xO,yO)為巡線機器人無動力下坡能夠獲得加速度的最低值,為了避免在xO處發生來回振蕩以及在部分大坡度線路xO處附近高速碰檢對側防震錘,須在xO之前一段距離開始減速.在開始無動力下坡之前,須對線路角度進行檢測,當θ<θmax,即小于可控最大角度時,才能允許無動力下坡.機器人無動力下坡條件控制策略的流程圖如圖5所示.
3 無動力下坡變論域模糊控速方法
巡線機器人經常工作于原始森林、高山大河之上的桿塔之間,機器人須具備全自主巡檢能力.在下坡過程中,由于線路的表面狀況不同以及線路加載機器人后產生的局部形變,并且考慮風載荷的影響、溫度變化對導線垂度產生的影響等,巡線機器人速度控制模型呈現出非線性特征,傳統的PI控制方法可靠、穩定,但是無法克服模型發生大范圍參數變化情況時以及非線性因素的影響.自適應PI控制器結構復雜、計算量較大、實時性能較差,在需要快速調節的速度控制系統中受到限制.模糊控制與PID控制相比,無需建立精確的數學模型,能夠根據專家經驗達到較好的控制效果,極大地簡化了運算量及控制的復雜程度.無動力下坡要求的速度控制范圍較大,使用普通的模糊控制,論域的范圍較大,易導致在目標點附近的控制不夠精細而產生振蕩.
變論域是在模糊控制的基礎上,實時評價偏差及偏差變化率,并調整模糊控制器的模糊劃分,實現模糊系統的自適應變化.由于論域能夠實時調整,相當于增加了控制規則的數目,從而提高控制精度.該方法對初始論域的準確性要求較低,并能夠克服專家經驗不足產生的控制精度不夠的問題.適用于巡線機器人無動力下坡速度控制的情況[9,11].
3.1 變論域模糊控制理論
設輸入變量xi(i=1,2,…,n)的論域為Xi= [-E,E](i=1,2,…,n)以及輸出變量y的論域為Y=[-U,U],xi(i=1,2,…,n)上的模糊劃分為ui{Aij}(1≤j≤m),y上的模糊劃分為β{Bj}(1≤j≤m),則可形成模糊推理規則[11]:

設xij為Aij的峰點,yi為Bj的峰點,基于規則(14)的模糊邏輯系統表現為一個n元分片插值函數:

所謂變論域,指的是論域Xi以及論域Y可以根據xi、y的變化情況自行調整,即

式中:α(xi)(i=1,2,…,n)和β分別為論域Xi和Y的伸縮因子.
根據式(16)、(17),可得式(15)的另一種形式:

由式(18)可以看出,控制器輸入變量論域調整可以等價為控制器輸入除以相應的伸縮因子,輸出變量的論域調整等價于控制器輸出乘以相應的伸縮因子.
3.2 變論域模糊控制器設計
變論域模糊控制器由兩部分組成,將巡線機器人速度偏差e與偏差變化率ec作為控制器的輸入量,并將脈寬調節器占空比增量u作為輸出量,形成主控制器.將e與ec作為伸縮因子模糊控制器的輸入,伸縮因子α(t)作為控制器輸出量.構建系統控制框圖如圖6所示.
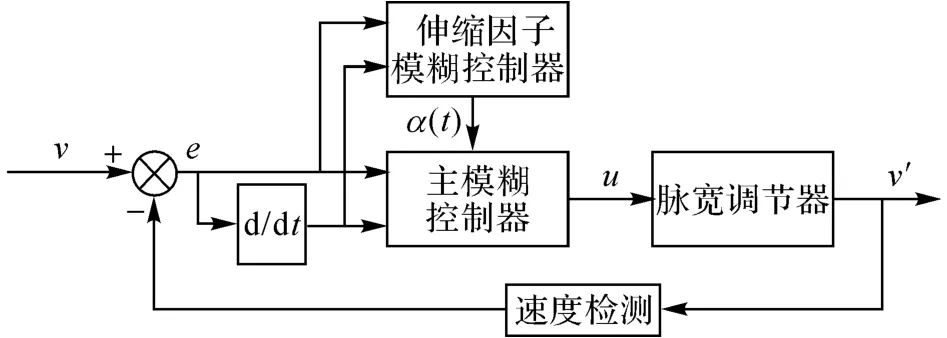
圖6 變論域模糊控制系統框圖Fig.6 Structure diagram of the variable universe fuzzy controler
3.2.1 伸縮因子模糊控制器的設計 由于伸縮因子主要影響論域的伸縮程度,無正負區別,為了從輸入獲得伸縮因子,將e與ec的絕對值與各自的設定范圍相除,取最大值作為伸縮因子模糊控制器的輸入量[9]:

經過式(19)處理,伸縮因子模糊控制器成為單輸入單輸出模糊控制器.輸入量與輸出量的取值范圍都是[0,1],描述輸入變量l(t)與輸出變量α(t)的模糊量語言值定為PS、PM、PB,隸屬度函數均采用三角形隸屬度函數,得到對應的模糊推理規則表,如表1所示.
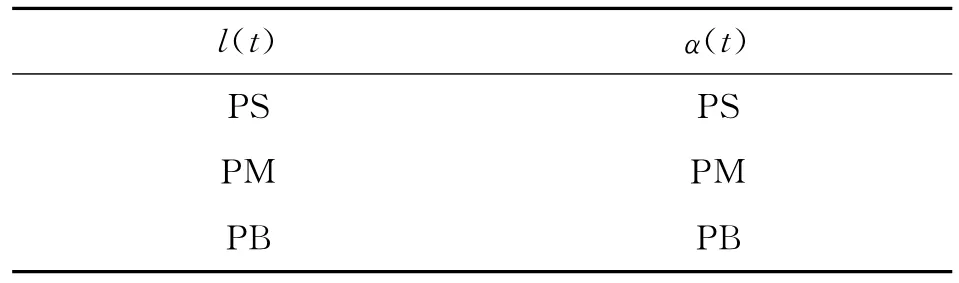
表1 伸縮因子模糊控制器推理規則表Tab.1 Fuzzy rule reasoning table of universe dilation factor
將輸出變量α(t)作為主模糊控制器輸入論域的伸縮因子,而輸出變量比例因子為α(t)+b(b為常數),根據試驗經驗可知,取b=0.35.
3.2.2 主模糊控制器設計 伸縮因子模糊控制器可以根據輸入值的不同改變主模糊控制器的伸縮因子及比例因子,故主模糊控制器的設計的主要任務集中在初始論域控制器的設計.根據e與ec的值決定占空比增量u的大小,將e與ec及u的模糊量語言值均設置為7檔,分別為:NB、NM、NS、ZE、PS、 PM、PB.論域及隸屬度函數如圖7所示.

圖7 各模糊變量隸屬度函數Fig.7 Subordinating degree functions of fuzzy variable
根據e與ec,結合專家的實驗經驗,以快速、穩定為目標,制定u的模糊推理規則表,如表2所示.
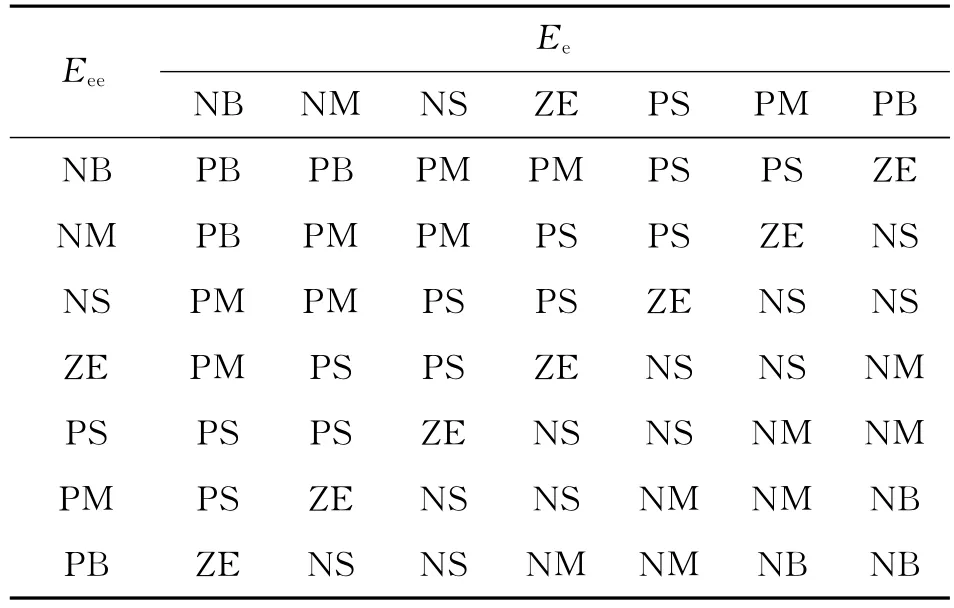
表2 主控制器模糊推理規則表Tab.2 Fuzzy rule reasoning table of main controller
4 試驗驗證
4.1 試驗原件選型與電路原理
為了實現PWM波脈寬可編程控制并且能夠同時執行速度檢測以及位置計算,采用基于ARM9的S3C2440作為無動力下坡速度控制系統SoC;采用光藕實現控制隔離,驅動MOSFET通斷實現整個能耗電路的通斷.電路圖如圖8所示.圖中,E為電機下坡旋轉過程中產生的感應電動勢,L為電樞電感.
為了盡量減少功率管應力,并滿足控制速度的平順性要求,將信號頻率設定在100 Hz.根據巡線機器人自重以及電機及減速器參數,結合以往線路的巡檢經驗,確定最大無動力下坡角度為30°.根據式(8),選擇鋁殼能耗電阻阻值為10Ω.

圖8 能耗控速系統實驗電路圖Fig.8 Circuit diagram of energy-consumed speed control system
4.2 模擬輸電線路試驗
在模擬輸電線路上搭建坡度為30°的線路,用于測試下坡速度控制算法效果,試驗場景如圖9所示.設置無動力下坡的目標轉速為6000r/min,經過20次試驗可知,時間t與轉速r的關系曲線如圖10所示.
由試驗結果曲線可以看出,采用模糊控制方法可以滿足無動力下坡狀態下的速度控制要求.變論域模糊控制器與單獨使用主模糊控制器相比,響應速度快,超調小,穩態性能好,速度控制更準確.

圖9 實驗室下坡試驗Fig.9 Downhill experiment of robot in laboratory conditions

圖10 時間-轉速關系曲線Fig.10 Curve of time-rotate speed
4.3 現場試驗
在吉林白山跨林區松長甲線#114~#119桿塔間進行試驗,其中,#114、#115桿塔高差為36.7 m,檔距為240 m,檔段全程下坡.將#114、#115桿塔段作為下坡條件判斷試驗及控速試驗檔段,機器人現場試驗圖如圖11所示.設定機器人的最大行走電機轉速為6 500r/min,由機器人自主進行下坡條件判斷.由于中間時間較長,將前面加速部分及后段碰檢防震錘之前減速部分的時間-轉速曲線分開表示,如圖12、13所示.
最終的碰檢對側防震錘電機轉速為1 800r/min,滿足機器人安全碰檢速度的要求,驗證了條件判斷策略的正確性.模糊控制器能夠較快地對判斷條件作出響應,并準確控制機器人的下坡巡檢速度.

圖11 現場無動力下坡試驗圖Fig.11 Unpowered downhill experiment on spot
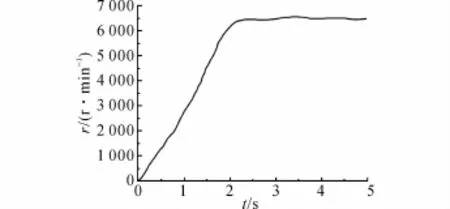
圖12 開始加速階段的時間-轉速曲線Fig.12 Curve of time-rotate speed in initial stage
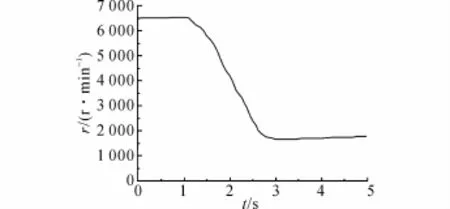
圖13 碰檢防震錘前的時間-轉速曲線Fig.13 Curve of time-rotate speed on final stage
無動力下坡的最終目標是減少巡線機器人巡檢能耗,從而提升續航能力.如表3所示為巡線機器人在不同檔距檔段分別采用無動力下坡與全程驅動器控制的現場能耗試驗數據對比.其中,前方桿塔高于后方桿塔時,高差h為正,WQ為全程驅動能耗,Wx為采用無動力下坡方法能耗,P為能耗減少百分比.為了使結果具有可比性,開始檔段與結束檔段的高差h為1.5 m,兩次巡檢方向相同.

表3 無動力下坡與全程驅動能耗對比Tab.3 Energy consumption contrast
本文由表3的數據可得,在高差為負、下坡距離較長的檔段,采用無動力下坡的節能效果十分明顯;在高差較大且為正的檔段,由于下坡距離較短,無動力下坡的節能效果有限.綜合全部巡檢檔段,采用無動力下坡控速方法可以較常規全程驅動減少10%~15%的能量消耗.
5 結 語
采用無動力下坡控速方法能夠滿足速度控制的要求,有效地節省機器人巡檢能量,提高機器人續航能力,適用于以行走輪驅動的巡線機器人.下一步的研究方向是無動力下坡過程中的能量回收.
(
):
[1]王偉,白玉成,吳功平,等.一種基于信息融合的巡線機器人電磁導航方法[J].電力系統自動化,2013,37(16):73-79.
WANG Wei,BAI Yu-cheng,WU Gong-ping,et al.An electromagnetic navigation method based on information fusion for inspection robot[J].Automation of Electric Power Systems,2013,37(16):73-79.
[2]POULIOT N,MONTAMBAULT S.Field-oriented developments for LineScout technology and its deployment on large water crossing transmission lines[J].Journal of Field Robotics,2012,29(1):25-46.
[3]WANG P,MEI S,LIU F,et al.Research on self-power supply sytem of inspection robot for high-voltage power transmission lines[J].Advanced Technology of Electrical Engineering and Energy,2011,30(4):244-247.
[4]白玉成,吳功平,肖華,等.輸電線路感應取電裝置參數匹配方法[J].電力系統自動化,2010,34(21):75-80.
BAI Yu-cheng,WU Gong-ping,XIAO Hua,et al.A parameter matching method for power induction devices on power transmission lines[J].Automation of Electric Power Systems,2010,34(21):75-80.
[5]孟遂民,孔偉.架空輸電線路設計[M].北京:中國電力出版社,2007:66-70.
[6]全玉生,王震宇,郝曉飛,等.基于懸鏈線理論的架空輸電線路故障測距算法[J].現代電力,2009,26(1):52-56.
QUAN Yu-sheng,WANG Zhen-yu,HAO Xiao-fei,et al.Fault estimation algorithm for overhead transmission line based on catenary theory[J].Modern Electric Power,2009,26(1):52-56.
[7]林海,何瑞玲,周海森,等.三相無刷直流電機改進型脈寬調制策略[J].電力系統及其自動化學報,2013,25(6):79-83.
LIN Hai,HE Rui-ling,ZHOU Hai-sen,et al.Improved PWM scheme for permanent magnet brushless DC motor drives[J].Proceedings of the CSU-EPSA,2013,25(6):79-83.
[8]LIU X,LIU C,LU M,et al.Regenerative braking control strategies of switched reluctance machine for electric bicycle[C]∥International Conference on Electrical Machines and Systems.Wuhan:IEEE,2008:3397-3400.
[9]李力,鄒硯湖.海底采礦車路徑跟蹤的變論域模糊控制[J].中南大學學報:自然科學版,2012,43(2):489-496.
LI Li,ZOU Yan-hu.Tracking moving path of seabed mining vehicle based on theory of variable universe fuzzy control[J].Journal of Central South University:Science and Technology,2012,43(2):489-496.
[10]管成,彭華.基于非線性函數的注塑機注射壓力模糊控制[J].浙江大學學報:工學版,2011,45(8):1382-1386.
GUAN Cheng,PENG Hua.Fuzzy control of injection pressure of injection molding machine based on a nonlinear function[J].Journal of Zhejiang University:Engineering Science,2011,45(8):1382-1386.
[11]LU Y,XIA C.Observer-based variable universe fuzzy control with dynamic self-structure[C]∥International Conference on Machine Learning and Cybernetics.Baoding:IEEE,2009:743-748.
Speed control method of unpowered downhill for high voltage transmission line inspection robot
HU Jian1,WU Gong-ping1,WANG Wei1,YANG Shou-dong2,LIU Ming2,YANG Zhi-yong1,HE Yuan1,GUO Lei1
(1.School of Power and Mechanical Engineering,Wuhan University,Wuhan 430072,China;2.Baishan Power Company,Jilin Electric Power Company,Baishan134300,China)
A speed control method of unpowered downhill was proposed combined with energy-consumed braking method and pulse width method(PWM)in order to improve endurance ability and reduce energy consumption of inspection robot.Downhill speed was controlled by adjusting the duty cycle of energyconsumed circuit so as to change the energy consumption.A condition judgment strategy based on model of overhead ground wire was proposed,and a variable universe fuzzy controller was used to control speed in real time.Experiments were conducted to verify the effectiveness of the above conclusions in both laboratory and real inspection environment.Results show that the proposed method can effectively control the robot unpowered downhill and save energy consumption.
high voltage transmission line;inspection robot;energy-consumed speed control;fuzzy control
TH 39;TM 331
A
1008-973X(2015)10-1878-07
2014-09-14.浙江大學學報(工學版)網址:www.journals.zju.edu.cn/eng
國家“863”高技術研究發展計劃資助項目(2005AA42006-1);國家自然科學基金資助項目(51105281).
胡健(1989—),男,碩士生,從事特種作業機器人的研究.ORCID:0000-0002-8349-6595.E-mail:hujian0809@163.com
王偉,男,講師.ORCID:0000-0002-6010-8166.E-mail:whuww@whu.edu.cn
