改進的強跟蹤容積卡爾曼濾波的機動目標跟蹤*1
2015-03-10 01:19:26張恒,高敏,徐超
現代防御技術 2015年6期
?
改進的強跟蹤容積卡爾曼濾波的機動目標跟蹤*1
張恒,高敏,徐超
(軍械工程學院 導彈工程系,河北 石家莊050003)
摘要:機動目標的跟蹤在實際中有著廣泛的應用,其核心問題是機動建模和濾波算法。采用當前統計模型和容積卡爾曼濾波對機動目標進行跟蹤。針對容積卡爾曼濾波在目標突發機動時跟蹤性能較差的問題,借鑒強跟蹤濾波思想,將漸消因子引入濾波過程,提出了一種改進的強跟蹤容積卡爾曼濾波算法,該算法實現簡單,估計精度高,魯棒性強。仿真結果表明,該算法有效增強了系統對目標突發機動的自適應跟蹤能力,并保持了對弱機動和非機動目標良好的跟蹤性能,且運算速度較快。
關鍵詞:機動目標;當前統計模型;容積卡爾曼濾波;強跟蹤濾波器
0引言
在實際工程中會面臨各種非線性問題,非線性系統的研究變得越來越重要。作為非線性系統理論的重要研究方向,非線性濾波算法在目標跟蹤領域應用廣泛。而目標跟蹤在精確制導、智能導航等領域大有用途,因此,深入研究非線性濾波算法,對目標跟蹤問題具有重要的現實意義。
機動目標跟蹤一直是目標跟蹤的一個研究重點,主要包括機動建模和濾波算法兩部分[1],其主要思想是將目標機動等價為系統狀態噪聲的加入,并依據過程噪聲統計特性建立相應的目標運動模型,然后利用非線性濾波算法進行狀態估計[1-2]。根據對狀態噪聲統計特性的不同假設,提出了不同的機動模型,其中應用較為廣泛的有 Singer 模型、當前統計模型(current statistical model,CS)、Jerk模型、交互式多模型(interacting multiple model,IMM)以及基于機動檢測的跟蹤算法等。基于機動檢測的跟蹤算法存在暫態誤差和時間滯后等問題[3];交互式多模型依賴于各個模型的性能以及模型集的選擇,而且對于弱機動和非機動目標采用IMM算法會造成資源的浪費[4];Jerk模型引入加加速度,可得到對目標加速度更精確的估計,有較高的跟蹤精度,但是在階躍機動的跟蹤中存在穩態確定性誤差[1,5],影響了其應用;CS模型是對Singer模型的發展,更關心目標機動的當前統計特性,能自適應地調整過程噪聲,能夠很好地實現目標自適應跟蹤[6],性能優于Singer模型。
非線性濾波問題來源于含噪聲觀測值非線性隨機系統的狀態估計問題[7]。擴展卡爾曼濾波(extended Kalman filter,EKF)是將非線性函數進行泰勒級數展開,取其一階項或二階項,從而將非線性問題線性化,計算簡單,因而獲得了廣泛的應用。而對于強非線性系統,EKF誤差較大,濾波精度降低,甚至引起濾波發散,而且EKF必須解算雅可比矩陣,增加了解決問題的難度。為了克服上述缺陷,Juiler等人[8]提出了無跡卡爾曼濾波算法(unscented Kalman filter,UKF),該算法采用一組確定權值的采樣點來逼近非線性分布來解決非線性問題,不需要對非線性系統進行線性化,性能優于EKF,但是UKF需要對參數進行合理選擇才能取得較好的濾波效果。近年來,Arasaratnam等人[9]提出了一種新穎的非線性濾波算法,容積卡爾曼濾波算法(cubature Kalman filter,CKF)使用基于球面徑向積分準則的數值積分方法計算非線性變換的隨機變量后的均值和協方差,CKF算法實現簡單,濾波精度高。
實際應用中,機動目標很可能出現突變機動,但是CKF算法在當系統處于平穩狀態時,對突變狀態的自適應估計能力較差。這是由于增益矩陣對預測殘差突變反應滯后造成的[10]。本文將強跟蹤濾波算法[11-12]的思想引入到CKF中,利用漸消因子實時調整增益矩陣,從而增強了系統對突變狀態的自適應跟蹤能力。本文利用CS模型對機動目標進行建模,然后通過提出的改進的強跟蹤容積卡爾曼濾波算法(improved strong tracking cubature Kalman filter,ISTCKF)對機動目標的狀態進行估計,從而達到對機動目標的自適應跟蹤。
1目標跟蹤運動模型
當前統計模型是周宏仁[6]于1983年提出來的。該算法采用修正瑞利分布來描述機動加速度的統計特性,具有自適應零均值的特點,是對Singer模型的發展改進。該模型在對目標狀態進行估計的同時,利用“當前”加速度均值實時地修正加速度分布,并通過方差調整下一時刻的濾波增益,實現了閉環自適應跟蹤。
設目標運動狀態方程為

(1)
式中:F(k)為狀態轉移矩陣;G(k)為輸入控制矩陣,即
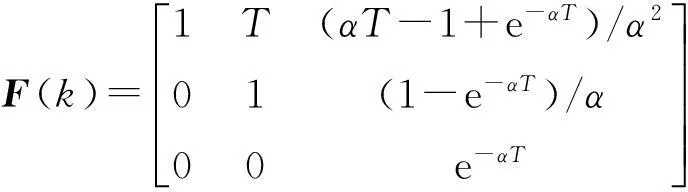
(2)
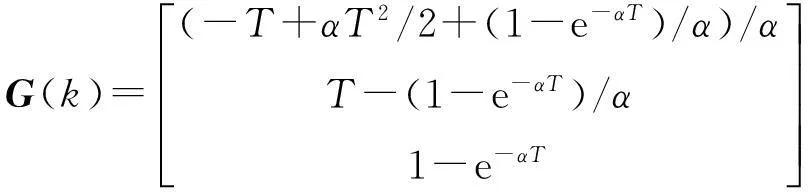
(3)
W(k)為高斯白噪聲,且其協方差為
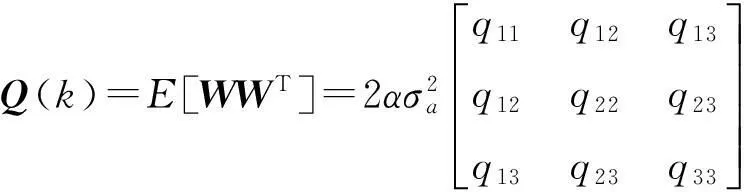
(4)

(5)

amax,a-max分別為目標正、負最大加速度。
2容積卡爾曼濾波與強跟蹤
2.1容積卡爾曼濾波算法
容積卡爾曼濾波(cubature Kalman filter,CKF)算法由高斯域貝葉斯濾波理論推導而來,該理論將非線性濾波轉化為非線性函數和高斯概率密度之乘積的積分求解問題[7]。對于如下積分
I(f)=∫Rnf(x)exp(-xTx)dx,
(6)
式中:Rn為積分域;x為狀態向量;f(x)為非線性函數。
CKF算法利用三階球面-徑向容積積分準則,采用2n個等權值的容積點ξi來實現非線性近似,即
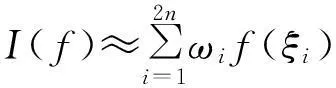
(7)
CKF算法流程描述如下:
(1) 時間更新
1) 計算容積點

(8)
2) 容積點傳播

(9)
3) 狀態預測估計和預測誤差協方差
(10)

(11)
(2) 量測更新
1) 計算容積點

(12)
2) 容積點傳播
Zi,k|k-1=h(Xi,k|k-1,uk).
(13)
3) 量測預測值估計,新息協方差矩陣和交叉協方差矩陣
(14)

(15)

(16)
4) 卡爾曼增益、狀態更新方差和協方差更新方程

(17)

(18)

(19)
2.2強跟蹤
濾波過程中狀態突變時,過去數據對當前濾波值影響較大,因此往往不能很好地反應當前狀態估計,很難實現自適應跟蹤。強跟蹤濾波算法建立在輸出殘差正交性原理之上,其通過引入漸消因子,將包含在殘差序列里的有效信息提取出來,實時調整增益矩陣,具有自適應跟蹤狀態變化的能力。強跟蹤濾波器將漸消因子引入到一步預測協方差矩陣中,以削減過去數據對當前濾波值得影響,其漸消因子λk+1計算方法為
(20)
式中:
(21)
tr(·)表示求矩陣的跡。

(22)

(23)
式中:V0,k+1為殘差協方差矩陣,且
(24)

3強跟蹤容積卡爾曼濾波
CKF算法雖然實現簡單、估計精度高,但是該算法在系統達到平穩狀態時,對目標突變機動的自適應跟蹤能力較差。這是由于系統狀態平穩時,CKF算法的增益矩陣將趨于極小值,當狀態發生突變時,預測殘差也發生較大變化,但此時系統增益矩陣仍保持為極小值,并不會隨殘差的變化而實時地自適應調整,使增益矩陣達不到最優。利用強跟蹤的思想,將漸消因子引入到CKF算法的一步預測協方差矩陣,以削減過去數據對當前濾波值的影響,從而自適應調整增益矩陣,達到穩定跟蹤的目的。
計算漸消因子需要計算雅可比矩陣Φ和Hk+1,但二者無法直接從CKF算法得到,需要加以改進,文獻[13]給出了改進的漸消因子的求法,如下

(25)

(26)
然而,強跟蹤濾波對狀態估計過于依賴量測值,雖然理論上可以得到最優估計,但是由于殘差協方差矩陣V0,k+1對真實的殘差方差近似不夠準確,導致對判定濾波異常的閾值設置較小,使得濾波增益達不到最優,且其估計值也不夠平滑[14]。
文獻[14]對改進的強跟蹤算法漸消因子引入弱化因子β,將判定濾波異常的閾值提高到βC0,k+1(C0,k+1為濾波殘差),可大大降低正常工作情況下誤判濾波發散的概率,同時提高了濾波器的精度。如下:

(27)

(28)
(29)
結合公式(20),(21),(24)即可求得改進的漸消因子λk+1,從而將ISTCKF算法中公式(11)預測誤差協方差Pk+1|k更新為式(30)即可得到改進的強跟蹤容積卡爾曼濾波算法濾波過程。

(30)
4仿真實驗及分析
4.1仿真場景
為了驗證本文機動目標跟蹤算法的有效性,本文對階躍機動和圓機動以及非機動進行了仿真驗證,并與CKF和UKF算法進行了比較。仿真是在直角坐標系二維平面內進行的,x軸和y軸上的量測噪聲均是均值為0、標準偏差為50 m的高斯序列,掃描周期為0.25 s,機動頻率為0.05。在當前統計模型算法中,最大機動加速度設為amax=120 m/s2,仿真次數為100次。目標運動軌跡設定為:目標初始在x軸做勻速運動,初速200 m/s,隨后以加速度100 m/s2減速為0;在第68~84個掃描區間,以加速度200 m/s2沿y軸先加速至400 m/s再減速為零;第84~124個掃描區間沿x軸以加速度100 m/s2加速至300 m/s,隨后保持勻速運動;第124~170個掃描區間,以向心加速度80 m/s2做180°勻速圓機動;第170~210個掃描區間,沿x軸保持勻速運動;第210~226個掃描區間,在x軸上以加速度100 m/s2先減速再加速,y軸上以加速度100 m/s2先加速再減速;隨后沿x軸以速度300 m/s保持勻速運動。運動軌跡如圖1所示。
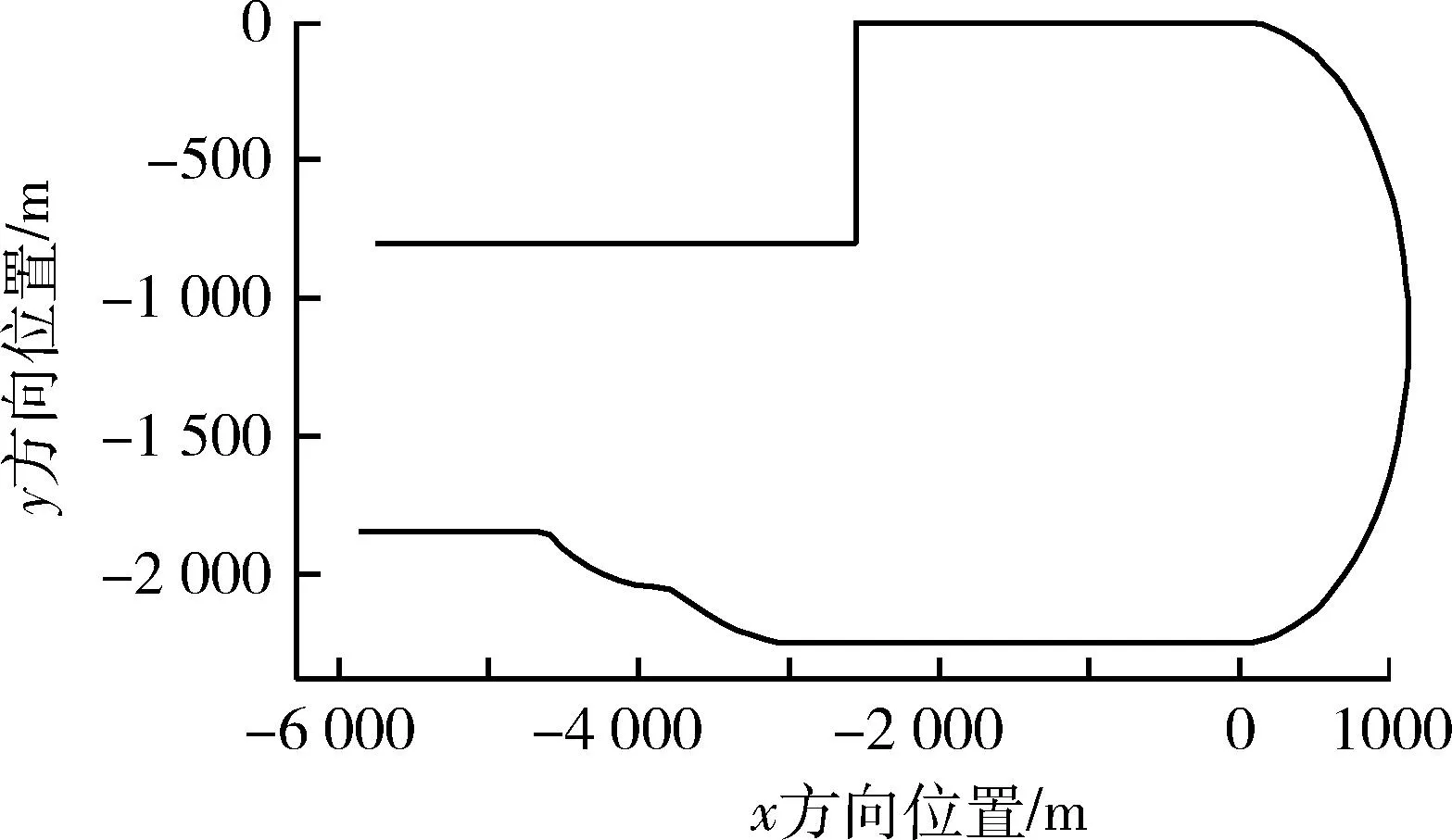
圖1 目標運動軌跡Fig.1 Curve of target tracks
4.2仿真結果及分析
為克服初始狀態對濾波精度的影響,這里統一假定濾波初始狀態為

(-5 750,100,0,-800,0,0)T,

為了公平比較各非線性濾波算法,進行100次獨立仿真取其平均。將本文改進的強跟蹤容積卡爾曼濾波算法(ISTCKF)與CKF,UKF進行比較。圖2表示3種濾波算法的跟蹤軌跡對比。
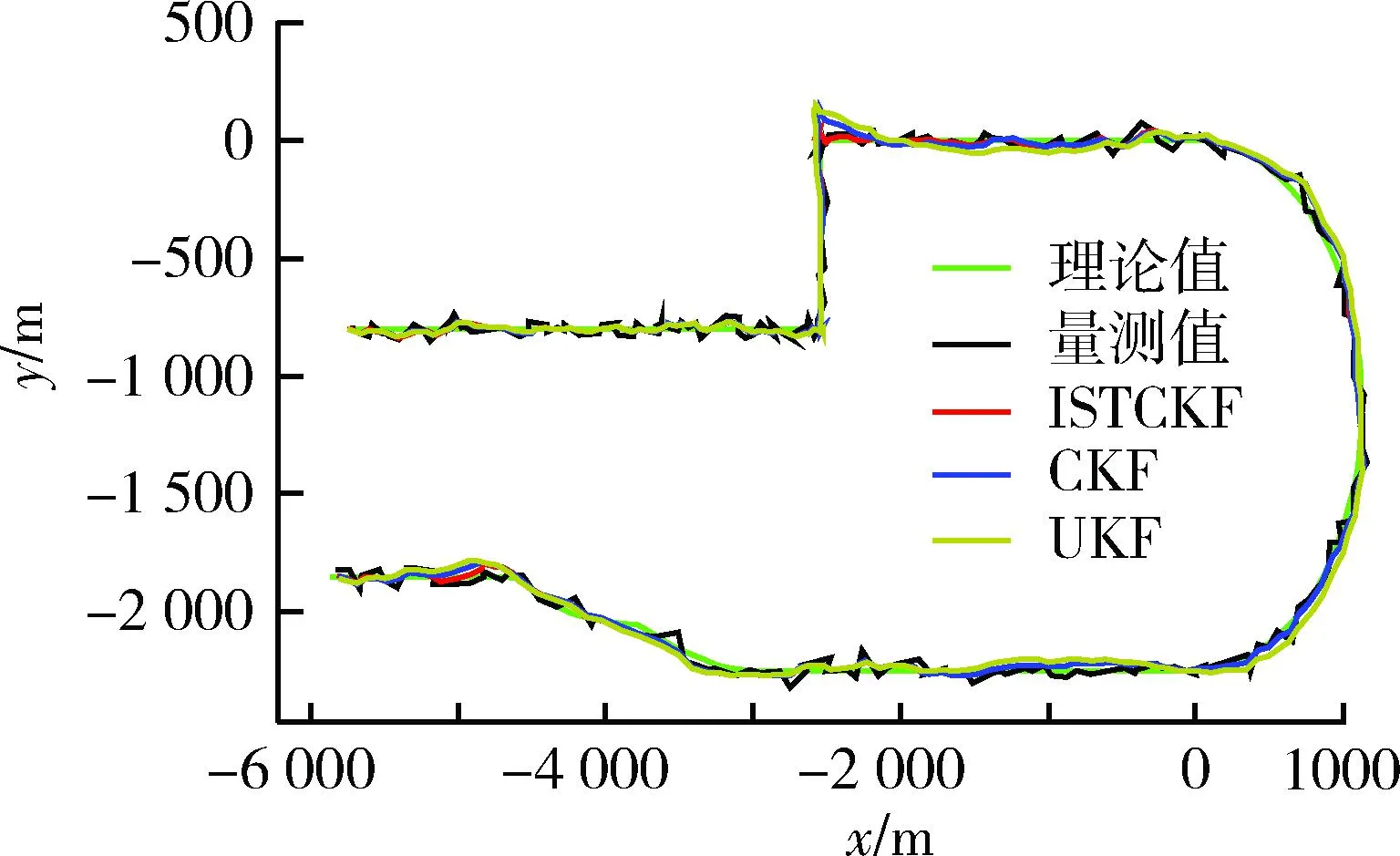
圖2 3種濾波算法的跟蹤軌跡對比Fig.2 Comparison of tracking curves on three filtering algorithms
由圖2可見,本文提出的ISTCKF跟蹤比CKF和UKF更穩定,跟蹤誤差更小,在目標非機動和弱機動時,ISTCKF保持了較好的跟蹤性能,與CKF相當,優于UKF,尤其是在狀態突變的時刻,跟蹤穩定,收斂速度更快。同時CKF跟蹤性能略優于UKF。為定量比較各非線性濾波算法性能,定義均方根誤差(RMSE)為
(31)

圖3和表1表明本文的ISTCKF算法在各坐標方向的濾波誤差明顯小于其他非線性濾波器,尤其表現在目標狀態突變處。CKF的均方誤差性能要好于UKF。同時,也發現ISTCKF對運動目標,尤其是階躍機動目標位置和速度具有最強的跟蹤能力,能自適應地跟蹤狀態較大變化,CKF的跟蹤能力與UKF相差不大,CKF略優于UKF。
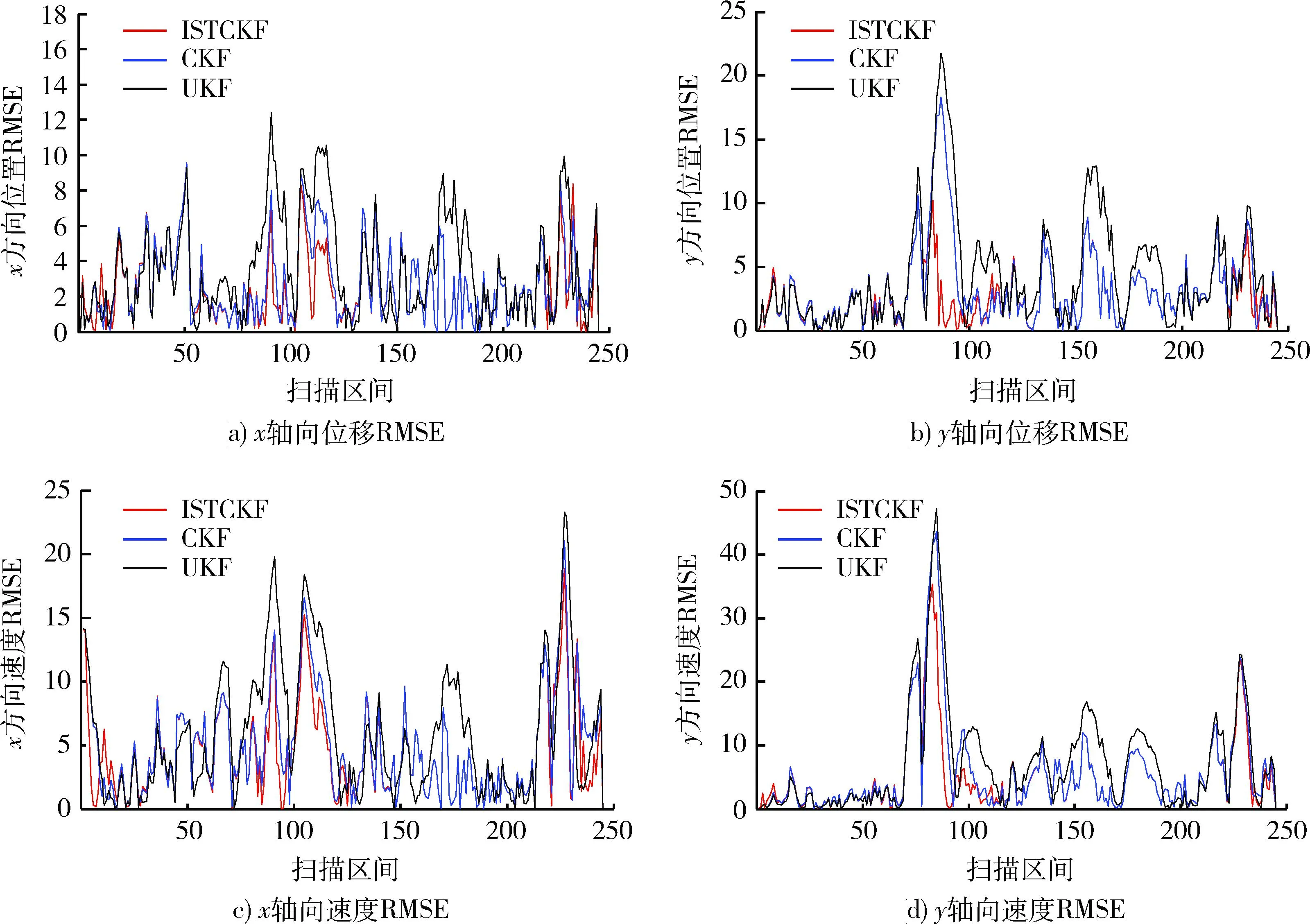
圖3 各方向軸狀態估計均方誤差(RMSE)Fig.3 Curves of state estimation RMSE along x-axis and y-axis
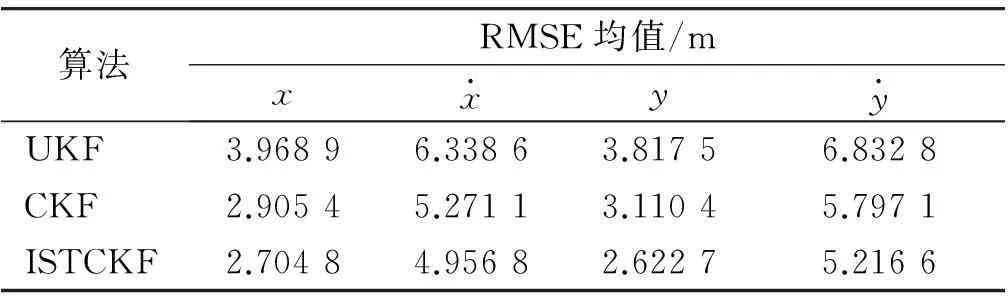
算法RMSE均值/mxx·yy·UKF3.96896.33863.81756.8328CKF2.90545.27113.11045.7971ISTCKF2.70484.95682.62275.2166
表2列出了各濾波算法的運算時間。從表中可知,ISTCKF的運算時間相比CKF略有增加,但對濾波器整體濾波性能影響較小,UKF在3種算法中運算時間最短。

表2 各算法運行時間
5結束語
本文主要針對傳統容積卡爾曼濾波在目標發生突變機動時跟蹤性能下降的問題,借鑒了強跟蹤濾波器的思想,結合當前統計模型,提出了一種改進的強跟蹤容積卡爾曼濾波算法,增強了系統對強機動的自適應跟蹤能力。仿真結果表明,跟蹤非機動和弱機動目標時,ISTCKF性能和CKF相當,同時優于UKF,而跟蹤突發機動目標時,ISTCKF性能明顯優于CKF和UKF,實現了自適應跟蹤。
參考文獻:
[1]劉望生,李亞安,崔琳. 高度機動目標Jerk模型及改進算法[J].兵工學報,2012,33(4):385-389.
LIU Wang-sheng, LI Ya-an, CUI Lin. An Improved Algorithm for High Maneuvering Target Based on Jerk Model[J]. Acta Armamentarii, 2012,33(4):385-389.
[2]李明月,時光煜,溫永強. 改進的高機動Jerk模型跟蹤算法[J].電光與控制,2013,20(5):40-43.
LI Ming-yue, SHI Guang-yu, WEN Yong-qiang. An Improved Jerk Model and Algorithm for Tracking Highly Maneuvering Targets[J]. Electronics Optics & Control, 2013,20(5):40-43.
[3]劉望生,李亞安,崔琳. 基于當前統計模型的機動目標自適應強跟蹤算法[J].系統工程與電子技術,2011,33(9):1937-1940.
LIU Wang-sheng, LI Ya-an, CUI Lin. Adaptive Strong Tracking Algorithm for Maneuvering Targets Based on Current Statistical Model[J]. Systems Engineering and Electronics, 2011,33(9):1937-1940.
[4]何友,修建娟,張晶煒,等.雷達數據處理及應用 [M].2版.北京:電子工業出版社,2009.
HE You, XIU Jian-juan, ZHANG Jing-wei,et al. Radar Data Processing With Applications [M].2nd ed. Beijing: Publishing House of Electronics Industry, 2009.
[5]喬向東,王寶樹. 高度機動目標的“當前”統計Jerk模型[J].系統工程與電子技術,2002,24(6):53-56.
QIAO Xiang-dong, WANG Bao-shu. A CS-Jerk Model for Tracking Highly Maneuvering Targets[J]. Systems Engineering and Electronics, 2002,24(6):53-56.
[6]周宏仁,敬忠良,王培德.機動目標跟蹤[M].北京:國防工業出版社,1991.
ZHOU Hong-ren, JING Zhong-liang, WANG Pei-de. Maneuvering Targets Tracking[M].Beijing:National Defence Industry Press,1991.
[7]張鑫春,郭承軍.均方根嵌入式容積卡爾曼濾波[J].控制理論與應用,2013,30(9):1116-1121.
ZHANG Xin-chun, GUO Cheng-jun. Square-Root Imbedded Cubature Kalman Filtering[J]. Control Theory & Applications, 2013,30(9):1116-1121.
[8]JULIER S J, UHLMANN J K. A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators[J].IEEE Trans. on AC,45(3),2000:477-482.
[9]ARASARATNAM I, HAYKIN S. Cubature Kalman Filters[J]. IEEE Trans. on Automatic Control,2009,54(6):1254-1269.
[10]霍光,李冬海,李晶.基于強跟蹤容積卡爾曼濾波的單站無源跟蹤算法[J].現代雷達,2013,35(11): 52-57.
HUO Guang, LI Dong-hai, LI Jing. A Single Observer Passive Tracking Algorithm Based on Strong Tracking Cubature Kalman Filter[J]. Modern Radar,2013, 35(11): 52-57.
[11]周東華,席裕庚,張鐘俊.非線性系統帶次優漸消因子的擴展卡爾曼濾波[J].控制與決策,1990,5(5):1-6.
ZHOU Dong-hua, XI Yu-geng, ZHANG Zhong-jun. The Extended Kalman Filter with Suboptimal Fading Factor in Nonlinear System[J]. Control and Decision, 1990,5(5):1-6.
[12]周東華,席裕庚,張鐘俊.一種帶多重次優漸消因子的擴展卡爾曼濾波[J].自動化學報,1991,17(6):689-695.
ZHOU Dong-hua, XI Yu-geng, ZHANG Zhong-jun. An Extended Kalman Filter with Multiple Suboptimal Fading Factor[J]. Acta Automatica Sinica, 1991,17(6):689-695.
[13]王小旭,趙琳,夏全喜,等. 基于Unscented變換的強跟蹤濾波器[J].控制與決策,2010,25(7):1063-1068.
WANG Xiao-xu, ZHAO Lin, XIA Quan-xi,et al. Strong Tracking Filter Based on Unscented Transformation[J]. Control and Decision, 2010,25(7):1063-1068.
[14]葛磊.容積卡爾曼濾波算法研究及其在導航中的應用[D].哈爾濱:哈爾濱工程大學,2013.
GE Lei. Research on Cubature Kalman Filter and Its Application for Navigation[D]. Harbin: Harbin Engineering University,2013.
Maneuvering Target Tracking Algorithm Based on Improved Strong Tracking Cubature Kalman Filters
ZHANG Heng,GAO Min,XU Chao
(Ordnance Engineering College,Missile Engineering Department,Hebei Shijiazhuang 050003, China)
Abstract:Tracking of maneuvering targets is widely used in practice, and its core issues are system model and filtering algorithm. The current statistical model and cubature Kalman filter are applied to maneuvering target tracking. For the degradation of adaptive tracking performance in sudden maneuvering of targets, an improved strong tracking cubature Kalman filter algorithm is proposed by introducing the fading factor into filtering process learnt from strong tracking filter. The algorithm has a simple implementation, high estimation accuracy and good robustness. The simulation results show that the adaptive tracking performance for the sudden maneuvering of targets is improved effectively and a good tracking performance for weak motion and the nonmaneuverable is maintained by the proposed algorithm, and the arithmetic speed is considerable.
Key words:maneuvering target; current statistical model; cubature Kalman filter; strong tracking filter
中圖分類號:TN953;TP301.6
文獻標志碼:A
文章編號:1009-086X(2015)-06-0142-06
doi:10.3969/j.issn.1009-086x.2015.06.024
通信地址:050003河北省石家莊市新華區和平西路97號軍械工程學院四系E-mail:tszhangheng@163.com
作者簡介:張恒(1990-),男,河南商丘人。碩士生,主要研究方向為彈藥的智能化與信息化技術。
*收稿日期:2014-08-28;修回日期:2014-10-10
