飛翼運(yùn)輸機(jī)重心前后限和縱向飛行品質(zhì)研究
2015-03-15 12:04:48呂新波盛慧齊萬(wàn)濤
飛行力學(xué) 2015年5期
關(guān)鍵詞:飛機(jī)設(shè)計(jì)
呂新波, 盛慧, 齊萬(wàn)濤
(中航工業(yè)第一飛機(jī)設(shè)計(jì)研究院 總體氣動(dòng)設(shè)計(jì)研究所, 陜西 西安 710089)
飛翼運(yùn)輸機(jī)重心前后限和縱向飛行品質(zhì)研究
呂新波, 盛慧, 齊萬(wàn)濤
(中航工業(yè)第一飛機(jī)設(shè)計(jì)研究院 總體氣動(dòng)設(shè)計(jì)研究所, 陜西 西安 710089)
為了提高飛翼運(yùn)輸機(jī)縱向飛行品質(zhì),首先研究了該類飛機(jī)縱向氣動(dòng)性和操縱特點(diǎn),并給出了確定其重心前后限的設(shè)計(jì)方法;然后給出了飛翼運(yùn)輸機(jī)縱向操縱能力的計(jì)算方法并進(jìn)行了計(jì)算分析;最后,針對(duì)飛翼運(yùn)輸機(jī)縱向本體穩(wěn)定性不滿足要求的問(wèn)題,研究了提高飛翼運(yùn)輸機(jī)縱向飛行品質(zhì)的有效方法。研究結(jié)果表明,飛翼運(yùn)輸機(jī)特有的操縱特性可提高其升阻比,通過(guò)合理設(shè)計(jì)重心前后限以及增穩(wěn)系統(tǒng)控制律可以保證飛翼運(yùn)輸機(jī)具有滿意的飛行品質(zhì)。
飛翼; 重心前后限; 縱向靜穩(wěn)定性; 短周期模態(tài); 控制律
0 引言
為了降低成本、提高競(jìng)爭(zhēng)力,各航空公司將低油耗、高經(jīng)濟(jì)性作為下一代運(yùn)輸機(jī)的主要要求。因具有優(yōu)良的升阻特性(最大升阻比為20~25),飛翼運(yùn)輸機(jī)作為有潛力的創(chuàng)新型飛機(jī)越來(lái)越受到重視。飛翼運(yùn)輸機(jī)是一種既沒(méi)有平尾,也沒(méi)有垂尾的非常規(guī)布局飛機(jī)[1],是綜合了氣動(dòng)、推力及飛控一體化的先進(jìn)飛機(jī)。作為未來(lái)運(yùn)輸機(jī),飛翼運(yùn)輸機(jī)令人耳目一新,翼身融合體更多地顧及了空氣動(dòng)力特性的優(yōu)化和有效載荷的增加。國(guó)外對(duì)飛翼運(yùn)輸機(jī)氣動(dòng)布局進(jìn)行了詳細(xì)研究[2],將其作為下一代新型氣動(dòng)布局飛機(jī)首選方案之一[3]。文獻(xiàn)[4]將飛翼氣動(dòng)布局應(yīng)用到民用運(yùn)輸機(jī)的設(shè)計(jì)中,重點(diǎn)對(duì)飛翼運(yùn)輸機(jī)的氣動(dòng)布局進(jìn)行了研究。因?yàn)闆](méi)有平尾和垂尾,所以飛翼運(yùn)輸機(jī)的設(shè)計(jì)難點(diǎn)主要體現(xiàn)在操縱性和穩(wěn)定性方面。由于飛翼布局導(dǎo)致的氣動(dòng)、質(zhì)量特性以及特殊操縱面的顯著特點(diǎn),飛翼運(yùn)輸機(jī)設(shè)計(jì)思路和方法有很多獨(dú)特之處。
本文重點(diǎn)研究了飛翼運(yùn)輸機(jī)重心前后限的設(shè)計(jì)方法以及縱向操縱性、穩(wěn)定性設(shè)計(jì)方法,同時(shí)給出了確定飛翼運(yùn)輸機(jī)縱向最小靜穩(wěn)定裕度的方法。
1 縱向氣動(dòng)和操縱特點(diǎn)
本文研究的飛翼運(yùn)輸機(jī)如圖1所示。

圖1 飛翼運(yùn)輸機(jī)外形圖Fig.1 View of flying wing transport
飛翼布局與常規(guī)布局最主要的區(qū)別在于其取消了水平尾翼和垂直尾翼。飛翼布局俯仰操縱由安裝于機(jī)翼后緣處的兩對(duì)升降副翼來(lái)執(zhí)行,且當(dāng)兩對(duì)升降副翼差動(dòng)偏轉(zhuǎn)時(shí)可以進(jìn)行滾轉(zhuǎn)操縱。飛翼運(yùn)輸機(jī)的操縱性和穩(wěn)定性具有以下特點(diǎn):
(1)飛翼運(yùn)輸機(jī)俯仰操縱效率很低,約為常規(guī)布局飛機(jī)的1/7~1/5。主要原因?yàn)閳?zhí)行俯仰操縱的升降副翼離重心很近,操縱力臂很小;同時(shí)升降副翼還要進(jìn)行滾轉(zhuǎn)操縱,存在操縱權(quán)限的分配問(wèn)題;
(2)要考慮飛翼運(yùn)輸機(jī)各舵面組合操縱的影響,使用升降副翼產(chǎn)生的俯仰操縱效率不足時(shí),可以考慮其他操縱面產(chǎn)生的附加俯仰操縱效率,如阻力方向舵產(chǎn)生的俯仰操縱能力;
(3)由于俯仰操縱效率低,飛翼運(yùn)輸機(jī)重心范圍盡量小,且靜穩(wěn)定裕度不宜大;
(4)飛翼運(yùn)輸機(jī)俯仰阻尼導(dǎo)數(shù)約為常規(guī)布局飛機(jī)的1/12~1/10,會(huì)降低飛機(jī)短周期阻尼比,但考慮到飛機(jī)的靜穩(wěn)定裕度較小,因此飛翼運(yùn)輸機(jī)短周期阻尼比通常不會(huì)太低;
(5)飛翼運(yùn)輸機(jī)俯仰軸轉(zhuǎn)動(dòng)慣量約為常規(guī)布局飛機(jī)的1/4~1/3,該特點(diǎn)對(duì)提高短周期頻率和操縱期望參數(shù)是有利的。
2 重心前后限確定
飛機(jī)重心后限由飛機(jī)本體最小縱向靜穩(wěn)定裕度來(lái)確定。不同資料對(duì)縱向最小靜穩(wěn)定裕度提出了不同的定量要求,采用非電傳飛控系統(tǒng)的運(yùn)輸類飛機(jī)的縱向靜穩(wěn)定裕度的絕對(duì)值不小于10%MAC~12%MAC[5],典型的運(yùn)輸機(jī)在后重心位置上有5%MAC~10%MAC的縱向正靜裕量[6]。通常非電傳飛控系統(tǒng)大飛機(jī)的最小縱向靜穩(wěn)定裕度大一些,而電傳飛控系統(tǒng)大飛機(jī)的最小縱向靜穩(wěn)定裕度可以減小一些(進(jìn)行了放寬靜穩(wěn)定性)。最小縱向靜穩(wěn)定性與平均氣動(dòng)弦長(zhǎng)相關(guān),考慮到飛翼運(yùn)輸機(jī)的平均氣動(dòng)弦長(zhǎng)是常規(guī)布局飛機(jī)的1.5~2倍,因此常規(guī)布局的最小縱向靜穩(wěn)定裕度無(wú)法用于飛翼運(yùn)輸機(jī)。
飛翼運(yùn)輸機(jī)本體最小縱向靜穩(wěn)定裕度的確定與飛機(jī)總體要求及飛行品質(zhì)有關(guān)。雖然飛翼運(yùn)輸機(jī)采用電傳操縱,但可靠性及安全性要求飛翼運(yùn)輸機(jī)為縱向靜穩(wěn)定的。考慮到飛翼運(yùn)輸機(jī)俯仰操縱力臂短導(dǎo)致俯仰操縱效率很低,以及飛機(jī)重心有一定的范圍;因此飛翼運(yùn)輸機(jī)最小縱向靜穩(wěn)定裕度不宜過(guò)大,飛翼運(yùn)輸機(jī)本體應(yīng)該是弱靜穩(wěn)定的,但最小縱向靜穩(wěn)定裕度需要根據(jù)飛行品質(zhì)的計(jì)算來(lái)確定。
雖然飛行品質(zhì)規(guī)范GJB2874-97對(duì)最小縱向靜穩(wěn)定裕度沒(méi)有要求,但飛行品質(zhì)中的短周期反應(yīng)以及機(jī)動(dòng)飛行中的操縱感覺(jué)等要求,已經(jīng)潛在地對(duì)最小縱向靜穩(wěn)定裕度進(jìn)行了要求。研究認(rèn)為,縱向飛行品質(zhì)指標(biāo)為等級(jí)2所對(duì)應(yīng)的靜穩(wěn)定裕度作為本體最小縱向靜穩(wěn)定裕度適合于飛翼運(yùn)輸機(jī)。因此通過(guò)飛行品質(zhì)指標(biāo)的計(jì)算最終確定了飛翼運(yùn)輸機(jī)本體最小縱向靜穩(wěn)定裕度。圖2給出了給定縱向靜穩(wěn)定性的短周期操縱期望參數(shù)計(jì)算結(jié)果。最終確定出飛翼運(yùn)輸機(jī)本體最小縱向靜穩(wěn)定裕度為2%MAC~3%MAC時(shí),縱向飛行品質(zhì)可以滿足等級(jí)2的要求,通過(guò)電傳飛控可以進(jìn)一步提高飛行品質(zhì)。
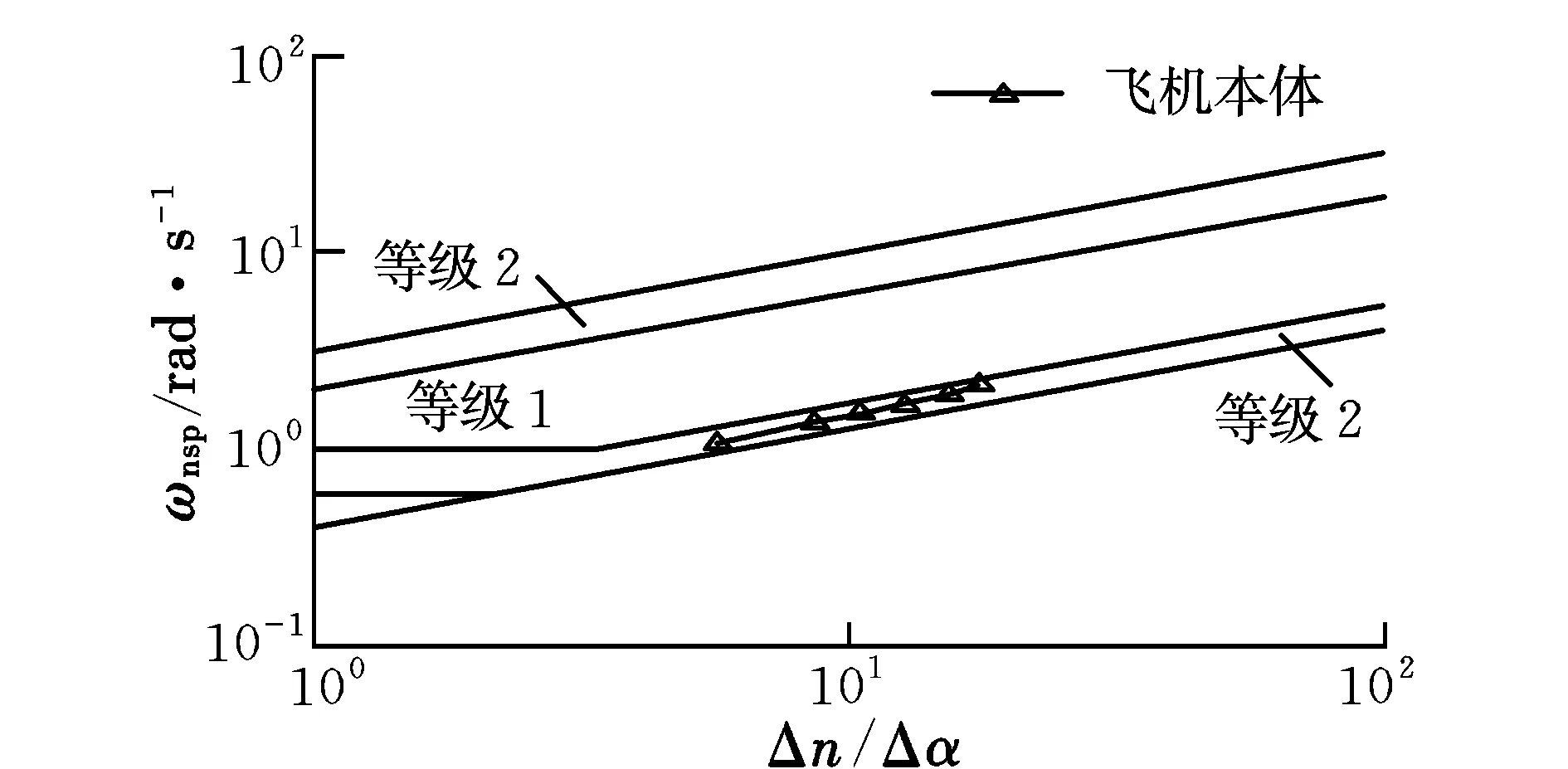
圖2 短周期頻率和操縱期望參數(shù)計(jì)算結(jié)果Fig.2 Results of short period frequency and control anticipant parameters
根據(jù)最小縱向靜穩(wěn)定裕度以及氣動(dòng)焦點(diǎn),通過(guò)式(1)可求出飛翼運(yùn)輸機(jī)重心后限:
(1)

通常飛機(jī)隨著燃油變化以及裝載變化重心有一定的變化范圍,在重心后限確定之后,根據(jù)重心的范圍,即可確定重心前限。考慮到飛翼運(yùn)輸機(jī)俯仰操縱效率不高,因此重心前限不能太靠前,也就是說(shuō)同時(shí)要求最小縱向靜穩(wěn)定裕度不宜過(guò)大以及重心范圍不宜過(guò)大,設(shè)計(jì)過(guò)程中通過(guò)耗油順序優(yōu)化以及裝載的合理布置確保一個(gè)較小的重心范圍,如5%MAC~6%MAC重心移動(dòng)范圍。此時(shí),確定出的重心前限對(duì)俯仰操縱能力提出了要求,也就是說(shuō)俯仰操縱效能必須要保證重心前限時(shí)飛機(jī)的操縱性滿足要求。
3 縱向操縱能力
對(duì)于常規(guī)布局,通常俯仰操縱面位于尾翼后緣,其俯仰力臂較大,在設(shè)計(jì)完翼身組合體后進(jìn)行尾翼設(shè)計(jì),確保操穩(wěn)特性滿足要求。飛翼布局與常規(guī)布局的最大差異在于取消了尾翼(包含平尾和垂尾),因此飛翼布局的俯仰操縱面只能布置于機(jī)翼后緣,目前采用較多的為升降副翼。升降副翼不但具有俯仰操縱功能,而且還具有滾轉(zhuǎn)操縱能力。
操縱面最基本的作用就是提供滿足規(guī)范要求的操縱效能。方案階段,可以根據(jù)以下針對(duì)縱向操縱性的要求來(lái)設(shè)計(jì)飛翼運(yùn)輸機(jī)舵面操縱效能。
(1)起飛抬前輪要求
起飛抬前輪是一項(xiàng)必須檢查的縱向操縱效能設(shè)計(jì)狀態(tài)。規(guī)范要求在0.9倍最小離地速度時(shí),縱向操縱效能應(yīng)能使飛機(jī)抬起前輪,達(dá)到起飛離地姿態(tài)。飛翼運(yùn)輸機(jī)起飛抬前輪階段升力小,重點(diǎn)要克服地面支反力及摩擦力引起的低頭力矩,對(duì)于弱穩(wěn)定的飛翼運(yùn)輸機(jī),在重心前限平衡所需舵面負(fù)向偏量較大,因此該狀態(tài)點(diǎn)為計(jì)算俯仰操縱能力的臨界條件之一。
(2)
式中:q為動(dòng)壓;T為發(fā)動(dòng)機(jī)推力;x為飛機(jī)重心至主輪軸的水平距離;f為主輪滾動(dòng)摩擦系數(shù);yg為飛機(jī)重心至地面的鉛垂距離;yp為發(fā)動(dòng)機(jī)推力線偏離飛機(jī)重心的鉛垂距離;SW為機(jī)翼參考面積;Cm為俯仰力矩系數(shù);δe為升降副翼偏角。
對(duì)本文飛翼運(yùn)輸機(jī),在考慮一定阻力舵產(chǎn)生的俯仰力矩條件下,在重心前限起飛抬前輪所需的升降副翼偏角為-14°,滿足起飛抬前輪要求。計(jì)算分析發(fā)現(xiàn),重心和主起落架距離對(duì)飛機(jī)起飛抬前輪影響非常大,重心和主起落架距離不宜過(guò)大。由于飛翼布局大飛機(jī)俯仰操縱效率低,因此必須確定合適的重心和主起落架距離,才能滿足起飛抬前輪要求。
(2)著陸接地要求
規(guī)范要求飛機(jī)著陸下滑過(guò)程中,接近地面時(shí)縱向操縱效能應(yīng)足以使飛機(jī)達(dá)到并保持接地時(shí)的姿態(tài)。對(duì)于弱穩(wěn)定的飛翼運(yùn)輸機(jī),在重心前限著陸接地時(shí)平衡所需舵面負(fù)向偏量較大,該狀態(tài)點(diǎn)為計(jì)算俯仰操縱能力的臨界條件之一。
將式(3)~式(5)平衡計(jì)算公式聯(lián)合迭代求解,可得飛機(jī)著陸接地時(shí)所需的縱向操縱面偏角:
qSWCL(α,δe)=G-Tsinα
(3)
qSWCD(CL,δe)=Tcosα
(4)
qSWcACm(CL,δe)=Tyg
(5)
計(jì)算得到本文飛翼運(yùn)輸機(jī)重心前限著陸接地所需的升降副翼偏角為-11°,滿足著陸接地的要求。
調(diào)查結(jié)果顯示,有待進(jìn)一步提高的知識(shí)包括跨學(xué)科知識(shí)、專業(yè)基礎(chǔ)知識(shí)、研究方法論知識(shí)、專業(yè)前沿知識(shí)等。分別有42.5%和22.5%的學(xué)生認(rèn)為要提高專業(yè)前沿知識(shí)和研究方法論知識(shí);另有17.5%和12.5%學(xué)生認(rèn)為應(yīng)該提高跨學(xué)科知識(shí)和專業(yè)基礎(chǔ)知識(shí)。其中,大部分學(xué)生把專業(yè)前沿知識(shí)看做最需要提高的知識(shí)。在課程設(shè)置時(shí),如果沒(méi)有按照學(xué)生的知識(shí)結(jié)構(gòu)合理整合課程知識(shí)內(nèi)容,將會(huì)降低應(yīng)有的知識(shí)覆蓋面。在能力提升方面,大多數(shù)學(xué)生認(rèn)為創(chuàng)新能力和解決問(wèn)題能力有待提高。從目前高校對(duì)學(xué)生培養(yǎng)情況看,這兩種能力的確也是當(dāng)今大學(xué)生最欠缺的。
(3)機(jī)動(dòng)能力要求
縱向操縱面最重要的設(shè)計(jì)要求即要滿足飛行包線中的機(jī)動(dòng)過(guò)載。規(guī)范中要求在使用飛行包線內(nèi),單獨(dú)使用俯仰操縱時(shí)具有規(guī)定的法向過(guò)載范圍。因此在計(jì)算中首先求得縱向平衡所需舵面偏角,然后在此基礎(chǔ)上增加機(jī)動(dòng)所需舵面偏角,即為保證縱向機(jī)動(dòng)能力的舵面偏角。飛機(jī)在重心前限機(jī)動(dòng)速度機(jī)動(dòng)時(shí)舵面偏角需求為臨界值,大于機(jī)動(dòng)速度后可以對(duì)舵面進(jìn)行限偏。根據(jù)式(6)疊加配平時(shí)的縱向操縱面偏角,即可求出最大過(guò)載對(duì)應(yīng)的舵面偏角:
(6)
式中:Cmδe為升降副翼俯仰操縱效率;Cmq為俯仰力矩系數(shù)對(duì)俯仰角速度的導(dǎo)數(shù);μ為飛機(jī)的相對(duì)密度。
計(jì)算得到本文飛翼運(yùn)輸機(jī)重心前限機(jī)動(dòng)速度達(dá)到最大過(guò)載所需的升降副翼偏角為-8°,滿足機(jī)動(dòng)能力要求。
4 縱向穩(wěn)定性及控制律設(shè)計(jì)
飛翼運(yùn)輸機(jī)的縱向靜穩(wěn)定性較小,短周期頻率和操縱期望參數(shù)指標(biāo)不滿足圖2等級(jí)1的要求。飛翼運(yùn)輸機(jī)縱向穩(wěn)定性通過(guò)縱向操縱面結(jié)合自動(dòng)增穩(wěn)系統(tǒng)獲得,這樣縱向操縱面同時(shí)要實(shí)現(xiàn)縱向穩(wěn)定性要求。單獨(dú)俯仰速率反饋即阻尼器可以提高飛機(jī)短周期阻尼比,但對(duì)短周期頻率改變不大;單獨(dú)迎角反饋提高了短周期頻率,但降低了短周期阻尼比。因此通常同時(shí)使用俯仰速率反饋和迎角反饋(增穩(wěn)系統(tǒng))來(lái)提高飛機(jī)的短周期特性,進(jìn)行控制律設(shè)計(jì)。
(1)根據(jù)縱向短周期模態(tài)特性簡(jiǎn)化公式:
(7)
Cmq=Cmqbenti+KqCmδe
(8)

將式(8)帶入式(7)中可得:
(9)
根據(jù)式(9)即可求得增益Kq。
(2)根據(jù)縱向短周期模態(tài)特性簡(jiǎn)化公式:
(10)
Cmq=Cmα benti+KαCmδe
(11)
由于式(10)中第二部分相對(duì)第一部分為小量,忽略后,將式(11)帶入式(10)可得:
(12)
根據(jù)式(12)即可求得增益Kα。
圖3給出了飛翼運(yùn)輸機(jī)縱向增穩(wěn)系統(tǒng)框圖。在巡航高度,當(dāng)增益Kq=[0.21,0.18,0.17,0.16,0.15,0.13],Kα=[0.45,0.43,0.40,0.37,0.35,0.32]時(shí)的操縱期望參數(shù)、短周期頻率以及短周期阻尼比均能滿足等級(jí)1的要求。圖4和圖5給出了飛翼運(yùn)輸機(jī)本體以及增加縱向增穩(wěn)系統(tǒng)后的短周期模態(tài)特性。可以看出,增穩(wěn)系統(tǒng)可以改善飛機(jī)短周期模態(tài)特性,使飛機(jī)動(dòng)穩(wěn)定性滿足要求。
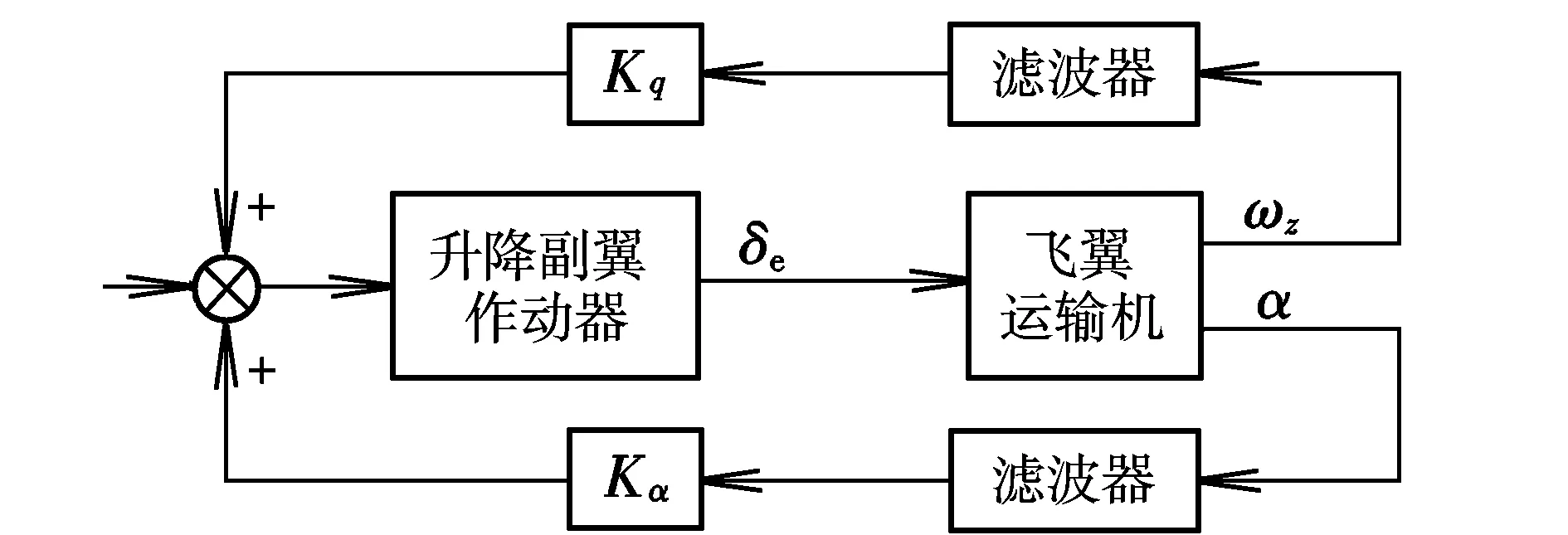
圖3 縱向增穩(wěn)系統(tǒng)框圖Fig.3 Chart of longitudinal augmentation system

圖4 飛翼運(yùn)輸機(jī)短周期阻尼比對(duì)比圖Fig.4 Compare figure of short period damping ratio of flying wing transport
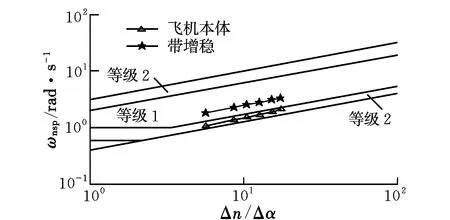
圖5 飛翼運(yùn)輸機(jī)短周期頻率操縱期望參數(shù)對(duì)比圖Fig.5 Compare figure of short period frequency and control anticipant parameter of flying wing transport
5 結(jié)束語(yǔ)
本文給出了飛翼運(yùn)輸機(jī)重心前后限的設(shè)計(jì)方法以及縱向操縱能力的計(jì)算方法,同時(shí)研究了提高飛翼運(yùn)輸機(jī)縱向飛行品質(zhì)的有效方法。該方法可以確保飛翼運(yùn)輸機(jī)具有滿意的縱向飛行品質(zhì),適用于工程中飛機(jī)方案設(shè)計(jì)和應(yīng)用。
[1] 林一平.崇尚簡(jiǎn)潔高效的飛翼運(yùn)輸機(jī)[J].交通和運(yùn)輸,2010(3):29-30.
[2] Liebeck R H.Design of the blend-wing-body subsonic transport [R].Journal of Aircraft, 2004,41(1):10-25.
[3] Mialon B,Fol T,Bonnaud C.Aerodynamic optimization of subsonic flying wing configuration [R].AIAA-2002-2931,2002.
[4] 楊宇飛.飛翼運(yùn)輸機(jī)氣動(dòng)布局設(shè)計(jì)[D].西安:西北工業(yè)大學(xué),2007.
[5] 比施根斯 Γ C.干線飛機(jī)空氣動(dòng)力學(xué)和飛行力學(xué)[M].孫榮科,等譯.北京:航空工業(yè)出版社,1996:236-237.
[6] 雷曼爾D P.現(xiàn)代飛機(jī)設(shè)計(jì)[M].北京:國(guó)防工業(yè)出版社,1992:305-306.
(編輯:李怡)
Center gravity limits and longitudinal flying qualities of flying wing transport
LYU Xin-bo, SHENG Hui, QI Wan-tao
(General Configuration and Aerodynamics Design Institute, AVIC the First Aircraft Institute, Xi’an 710089, China)
For increasing the longitudinal flying qualities of the flying wing transport, the aerodynamics and control characteristics were researched firstly. The design method to ascertain the forward and after center gravity limits of the aircraft was given. Then, the control capacity of the flying wing transport was calculated with suggested method. At last, for the problem of the longitudinal stability of the flying wing transport couldn’t meet the requirements, the effective measure was researched to improve the longitudinal flying qualities. Research results show that the flying wing transport has special control characteristics to pursue high lift-drag ratio. Reasonable design of the forward and after center gravity limit and the stability augmentation system control law can assure satisfied flying qualities for flying wing transport.
flying wing; forward and after center gravity limits; longitudinal static stability; short period mode; control law
2014-12-15;
2015-04-25;
時(shí)間:2015-06-24 15:03
呂新波(1977-),男,山西芮城人,高級(jí)工程師,碩士,主要從事飛機(jī)操縱性、穩(wěn)定性設(shè)計(jì)和研究工作。
V212.1
A
1002-0853(2015)05-0395-04
猜你喜歡
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
Coco薇(2017年5期)2017-06-05 08:53:16
