高超聲速飛行器巡航飛行控制器設(shè)計
2015-03-16 01:27:26趙林東唐勝景
飛行力學(xué) 2015年6期
趙林東, 唐勝景
(北京理工大學(xué) 宇航學(xué)院, 北京 100081)
高超聲速飛行器巡航飛行控制器設(shè)計
趙林東, 唐勝景
(北京理工大學(xué) 宇航學(xué)院, 北京 100081)
針對高超聲速飛行器高空高速巡航飛行時,其數(shù)學(xué)模型具有嚴(yán)重非線性、不穩(wěn)定性及參數(shù)不確定性等特點(diǎn),設(shè)計了包含法向過載指令跟蹤的非線性魯棒控制系統(tǒng)。通過忽略高度狀態(tài)量并引入縱向過載的積分作為一個虛擬輸出量,實現(xiàn)了非線性模型的完全反饋線性化和輸入/輸出解耦,推導(dǎo)出改進(jìn)模型并基于滑模控制方法設(shè)計了魯棒跟蹤控制器。仿真結(jié)果表明,該改進(jìn)模型是合理的,所設(shè)計的控制器能夠很好地實現(xiàn)對法向過載指令的準(zhǔn)確跟蹤。
高超聲速飛行器; 巡航飛行控制; 反饋線性化; 參數(shù)不確定性
0 引言
本世紀(jì)初,高超聲速飛行器因其巨大的軍民兩用前景和代表了航空航天技術(shù)制高點(diǎn)的地位,再次引起了廣泛的關(guān)注并得到深入研究。一般飛行速度超過馬赫數(shù)5的飛行器被稱為高超聲速飛行器[1]。已有的研究表明,高超聲速飛行器模型具有嚴(yán)重的非線性和各種耦合影響突出的特點(diǎn),并且由于飛行速度很高,飛行器對飛行條件和參數(shù)的變化非常敏感[2],這對控制系統(tǒng)的設(shè)計提出了挑戰(zhàn)。
動態(tài)逆是實現(xiàn)反饋線性化的一種重要方法,能夠?qū)⒃蔷€性系統(tǒng)補(bǔ)償為具有線性傳遞關(guān)系的且已解耦的偽線性系統(tǒng),然后利用線性系統(tǒng)的各種設(shè)計理論來完成偽線性系統(tǒng)的綜合[3]。文獻(xiàn)[4]針對通用高超聲速飛行器縱向模型,利用動態(tài)逆方法得到偽線性模型,考慮不確定參數(shù)后設(shè)計了自適應(yīng)滑模控制器,實現(xiàn)了對飛行高度和飛行速度指令的跟蹤。文獻(xiàn)[5]利用動態(tài)逆方法對吸氣式高超聲速飛行器(AHV)縱向模型進(jìn)行了輸入-輸出反饋線性化,考慮不確定參數(shù)影響并設(shè)計了魯棒控制器。文獻(xiàn)[6-8]利用動態(tài)逆方法對非線性模型進(jìn)行了反饋線性化處理。然而,上述研究中基本上是以跟蹤飛行高度和飛行速度指令為控制系統(tǒng)的設(shè)計目標(biāo),沒有考慮對法向機(jī)動過載的跟蹤控制。對于需要進(jìn)行機(jī)動飛行的高超聲速飛行器,實現(xiàn)對法向過載指令的跟蹤控制是必要的。
本文提出一種模型改進(jìn)方法,并采用滑模控制方法設(shè)計了跟蹤飛行速度指令和法向過載指令的魯棒控制器。最后,考慮模型參數(shù)不確定性的影響,采用高超聲速飛行器Winged-cone縱向模型進(jìn)行仿真,驗證了該控制方法的有效性。
1 高超聲速飛行器模型
高超聲速飛行器在不考慮彈性模態(tài)時,其剛體縱向模型方程基本一致,如Winged-cone模型[4]和AHV模型[5]。本文采用Winged-cone模型進(jìn)行推導(dǎo)和仿真。Winged-cone模型是NASA用于研究高超聲速飛行器的一種概念飛機(jī),是高超聲速飛行研究的一個標(biāo)準(zhǔn)模型,模型方程為[4]:
(1)
發(fā)動機(jī)模型[7]為:
式中:β為發(fā)動機(jī)節(jié)流閥調(diào)定值。文獻(xiàn)[7]采用一個二階系統(tǒng)模型來表示發(fā)動機(jī)的動態(tài)特性:
(2)

在上述模型中,控制量為發(fā)動機(jī)節(jié)流閥調(diào)定值βc和升降舵偏轉(zhuǎn)角δe。
2 模型改進(jìn)和控制器設(shè)計
2.1 動態(tài)逆控制方法

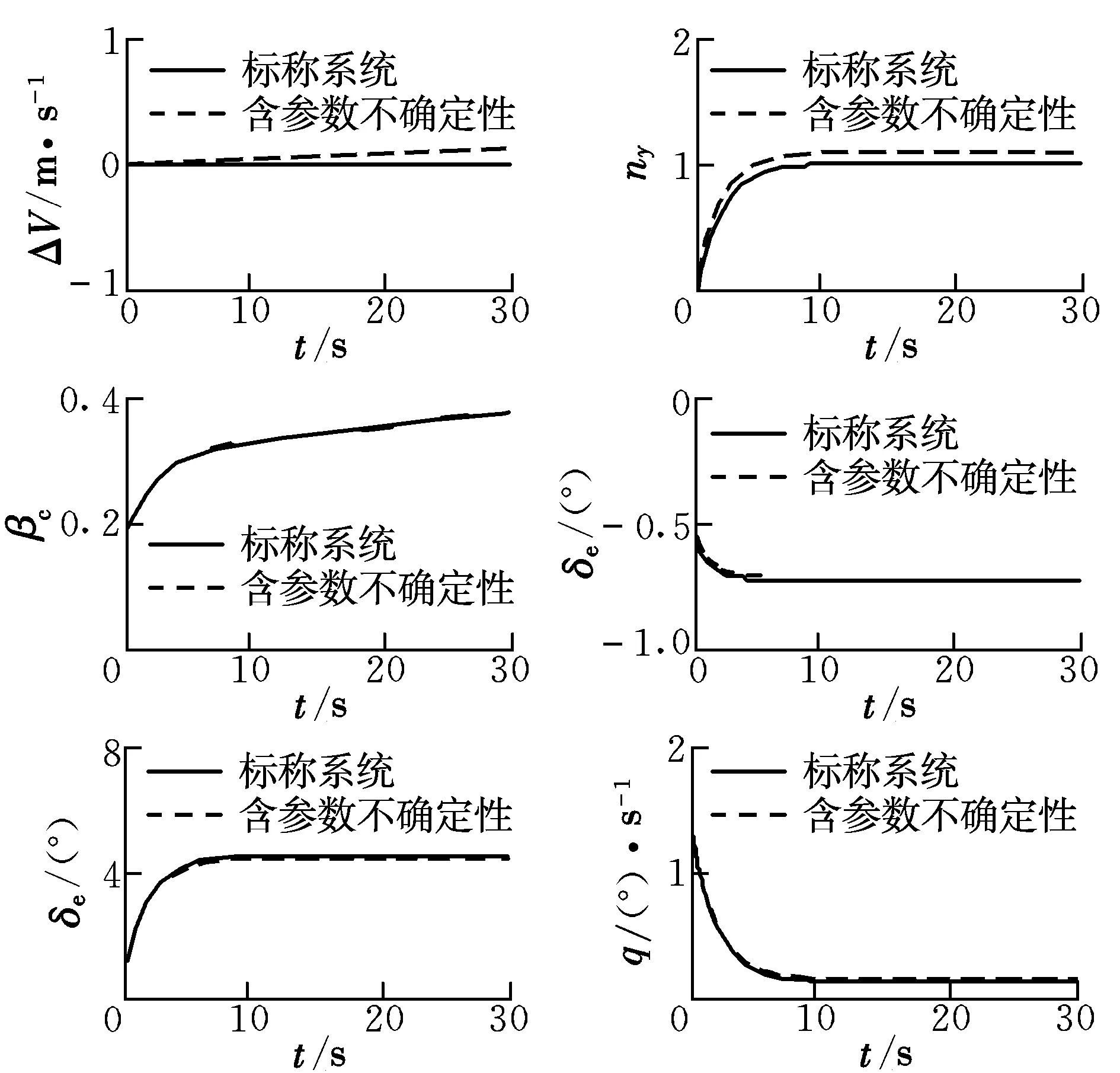
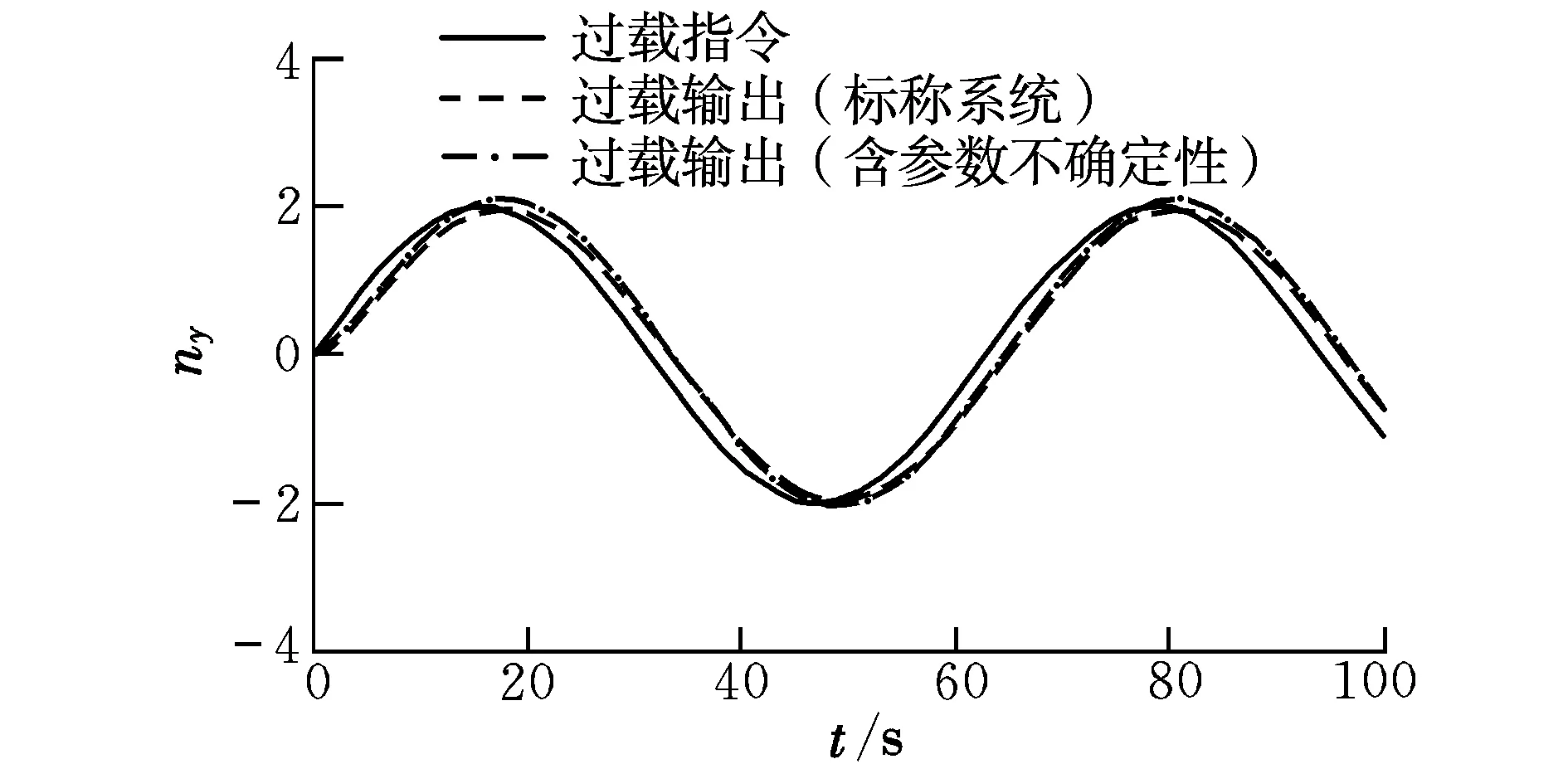
多輸入-多輸出系統(tǒng)的反饋線性化方法是對每一個輸出通道yi關(guān)于時間連續(xù)求微分,直到微分子式中首次出現(xiàn)至少一個控制輸入量為止,所有輸出量的微分次數(shù)之和稱為相對階數(shù)[9],記為p。若非線性系統(tǒng)的階數(shù)為n,則系統(tǒng)實現(xiàn)輸入-輸出完全線性化的充分必要條件是p=n;如果p 2.2 模型改進(jìn)和反饋線性化 文獻(xiàn)[4-8]使飛行器跟蹤飛行速度改變指令Vd和飛行高度改變指令Hd,以V和H作為輸出時恰好能實現(xiàn)完全線性化;而本文模型重點(diǎn)考慮在巡航飛行時飛行器能夠快速準(zhǔn)確跟蹤法向過載指令。飛行器系統(tǒng)模型為5階,發(fā)動機(jī)模型為2階,故非線性系統(tǒng)模型的階數(shù)為n=7,一般選用的狀態(tài)量為: (3) (4) 即對過載只需求兩次微分。若以飛行速度和法向過載為輸出,輸出量總的微分次數(shù)即相對階數(shù)為p=5,小于系統(tǒng)階數(shù)n,不滿足完全線性化的條件。為了滿足完全線性化條件,需要對模型做如下處理: (1)忽略高度狀態(tài) 本文設(shè)定高超聲速飛行器基準(zhǔn)模型在高度為32 km的高空以Ma=15的速度作水平巡航飛行。對高超聲速縱向模型在平衡點(diǎn)進(jìn)行小擾動線性化,從推導(dǎo)結(jié)果中發(fā)現(xiàn)高度的改變對速度V、飛行路徑角γ和飛行迎角α的影響如下: (5) =5.57×10-10 (6) =5.57×10-10 (7) 由式(5)~式(7)可知,關(guān)于高度H的偏導(dǎo)數(shù)只與μ,r,V和γ相關(guān),由于高空(r很大)和高速(V很大),關(guān)于高度H的偏導(dǎo)數(shù)都非常微小。為了更詳細(xì)分析高度帶來的影響,進(jìn)一步分析各偏導(dǎo)數(shù)之間的相對大小關(guān)系,令 (8) 則Θ中最后一列代表高度的影響,最后一列相對前面幾列的相對值即可代表高度狀態(tài)改變帶來的相對影響強(qiáng)弱程度。在平衡點(diǎn)(γ0=0°,α0=1.779 7°)計算得: Θ= (9) 選取另一組飛行狀態(tài)(γ=10°,α=15°),線性化并計算得: (10) 由式(9)和式(10)可知,飛行狀態(tài)關(guān)于高度的偏導(dǎo)數(shù)相對于其他偏導(dǎo)數(shù)項來說非常小,相對值不足1%,忽略以后對其他狀態(tài)量的影響不大。特別注意,在設(shè)計控制系統(tǒng)時忽略高度狀態(tài)項,相當(dāng)于僅忽略了高度變化對V,γ和α的直接影響項,而高度變化對大氣密度和空氣動力/力矩的影響沒有做任何改變和忽略,其依舊存在于相應(yīng)的氣動模塊中。 綜上所述,本文忽略高度狀態(tài)來建立改進(jìn)模型并設(shè)計控制系統(tǒng)具有一定的合理性。此時非線性系統(tǒng)階數(shù)為n=6,狀態(tài)變量取為: (11) (2)虛擬輸出量 忽略高度后系統(tǒng)模型的階數(shù)減小為6階,此時,輸出量的相對階數(shù)為5,仍然小于系統(tǒng)階數(shù)。所以直接將法向過載作為輸出量仍然不合適。 考慮法向過載的積分形式 (12) 若以Ny作為一個虛擬輸出信號,則有: (13) (14) (15) (16) 其中: (17) 其中: 在式(17)中,fV和fN與控制輸入無關(guān),分析發(fā)現(xiàn)除了γ=90°的飛行狀態(tài)以外,K-1都存在[4]。當(dāng)K可逆時,可得: (18) 式(18)即為高超聲速飛行器縱向非線性模型的逆系統(tǒng)。逆系統(tǒng)和高超聲速飛行器縱向模型的原系統(tǒng)組合成為一個偽線性復(fù)合系統(tǒng),其結(jié)構(gòu)如圖1所示。 圖1 偽線性復(fù)合系統(tǒng)結(jié)構(gòu)圖Fig.1 Block diagram of composite pseudo-linear system 通過反饋線性化,原非線性系統(tǒng)被解耦成為具有線性關(guān)系且解耦的“α階積分逆系統(tǒng)”,可以采用線性控制方法設(shè)計偽線性復(fù)合系統(tǒng)的控制器。 2.3 滑模控制器設(shè)計 基于前文推導(dǎo)的偽線性系統(tǒng),采用滑模控制方法實現(xiàn)對飛行速度改變指令Vd和法向過載指令ny的跟蹤。滑模面按控制性能需求設(shè)計,系統(tǒng)一旦進(jìn)入滑模面后,其滑模運(yùn)動就與被控對象的參數(shù)和外界干擾無關(guān),因此滑模控制器具有較強(qiáng)的魯棒性。 (19) 式中:a0,a1,b0為待定正常數(shù),決定了系統(tǒng)到達(dá)滑模面的動態(tài)特性,需要根據(jù)實際情況調(diào)整。進(jìn)一步聯(lián)合式(17)得: (20) 其中: 考慮滑模到達(dá)條件和抑制抖振的需要,滑模趨近律選為帶邊界層飽和函數(shù)的形式: (21) 式中:k1和k2為正常數(shù);Δ為邊界層厚度,且 邊界層厚度越小,控制增益越大,控制效果越好,但是抖振也越強(qiáng);反之,邊界層厚度越大,控制增益相對減小,抖振會得到抑制,但是控制效果會變差。所以,在使用時要根據(jù)實際情況合理選取邊界層厚度。 由式(20)和式(21)可得最終的滑模控制律: (22) 從式(22)可知,滑模控制律包含兩個部分,K-1[-v1,-v2]Τ為使系統(tǒng)狀態(tài)保持在滑模面上對應(yīng)的控制部分;K-1[-k1sat(sV/ΔV),-k2sat(sn/Δn)]Τ用來使因干擾或參數(shù)不確定引起的系統(tǒng)狀態(tài)偏離滑模面后重新回到滑模面上的控制部分。使用上述控制律,即使存在不確定性干擾,也能保證系統(tǒng)運(yùn)動軌跡到達(dá)滑模面。 利用Matlab & Simulink進(jìn)行仿真實現(xiàn),仿真時分包含和不包含參數(shù)不確定性兩種情況進(jìn)行。從0時刻起,考慮三種輸入指令情況:(1)給定飛行速度階躍指令Vd=50 m/s,法向過載指令為0,經(jīng)過30 s后得到的仿真曲線如圖2所示;(2)給定法向過載階躍指令nyd=1,速度指令為0,經(jīng)過30 s后得到的仿真曲線如圖3所示;(3)給定速度指令為0,法向過載指令變化規(guī)律為ny=2 sin(0.1t),仿真100 s得到的曲線如圖4所示。 由圖2可知,在標(biāo)稱系統(tǒng)和含有參數(shù)不確定性時,飛行速度指令都得到了快速準(zhǔn)確的跟蹤,同時法向過載都極小,兩個輸出通道實現(xiàn)了良好的解耦。 由圖3可知,法向過載指令在標(biāo)稱系統(tǒng)時得到了快速準(zhǔn)確的跟蹤,在存在參數(shù)不確定性時,法向過載有小于5%的穩(wěn)態(tài)誤差,同時速度的變化極小。 由圖4可知,即使在存在參數(shù)不確定性的情況下,正弦變化的法向過載指令也能得到較為準(zhǔn)確的跟蹤。這說明本文的控制方法能夠有效地實現(xiàn)對法向過載的準(zhǔn)確跟蹤,對參數(shù)不確定性具有一定的魯棒性。另外,從圖3可以看到,法向過載單位階躍響應(yīng)的上升時間約為8 s,而圖4中正弦波形式的法向過載跟蹤存在一定的相位滯后。這說明法向過載跟蹤響應(yīng)比較緩慢,主要是因為本文使用的高超聲速模型的質(zhì)量和轉(zhuǎn)動慣量都很大且高空氣動舵效率較低;也說明這類高超聲速飛行器在高空高速巡航飛行階段不適合進(jìn)行快速劇烈的機(jī)動,但如圖4中較慢的機(jī)動飛行是可行的。 圖3 nyd=1時的響應(yīng)曲線Fig.3 Response curves for nyd=1 圖4 ny=2 sin(0.1t)時的跟蹤曲線Fig.4 System tracking curves for ny=2 sin(0.1t) 本文針對通用高超聲速飛行器縱向模型,提出了對法向過載進(jìn)行跟蹤控制時的完全反饋線性化問題,采用滑模控制方法設(shè)計了跟蹤控制器,并進(jìn)行了仿真驗證。該法向過載跟蹤控制器能夠?qū)崿F(xiàn)對速度和法向過載的準(zhǔn)確跟蹤,并具有一定的魯棒性;同時,高超聲速飛行器在高空高速巡航飛行時,不適合做快速劇烈的機(jī)動,但能夠?qū)崿F(xiàn)較為緩慢的機(jī)動飛行。 [1] Fidan B,Mirmirani M,Ioannou P A.Flight dynamics and control of air-breathing hypersonic vehicle: review and new direction [R].AIAA-2003-7081,2003. [2] Marrison C I,Stengel R F.Design of robust control systems for a hypersonic aircraft [J].Journal of Guidance,Control,and Dynamics,1998,21(1):58-63. [3] 李春文,馮元琨.多變量非線性控制的逆系統(tǒng)方法[M].北京:清華大學(xué)出版社,1991:2-6. [4] Xu H J,Mirmirani M D,Ioannou P A.Adaptive sliding mode control design for a hypersonic flight vehicle [J].Journal of Guidance,Control,and Dynamics,2004,27(5):829-838. [5] Gao G,Wang J Z.Reference command tracking control for an air-breathing hypersonic vehicle with parametric uncertainties [J].Journal of the Franklin Institute,2013,350(5):1155-1188. [6] Parker J T,Serrani A,Yurkovich S,et al.Control-oriented modeling of an air-breathing hypersonic vehicle [J].Journal of Guidance,Control,and Dynamics,2007,30(3):856-869. [7] Wang Q,Stengel R F.Robust nonlinear control of a hypersonic aircraft [J].Journal of Guidance,Control,and Dynamics,2000,23(4):577-585. [8] Lohsoonthorn P,Jonckheere E,Dalzell S.Eigenstructure vs constrainedH∞design for hypersonic winged cone [J].Journal of Guidance,Control,and Dynamics,2001,24(4):648-658. [9] 賀昱曜,閆茂德.非線性控制理論及應(yīng)用[M].西安:西安電子科技大學(xué)出版社,2007:110-115. (編輯:李怡) Cruise flight controller design for a hypersonic vehicle ZHAO Lin-dong, TANG Sheng-jing (School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China) For the feature that the hypersonic vehicle shows serous nonlinearity, instability and parameter uncertainty when cruising at high altitude and great velocity, robust control method is proposed for the nonlinear system with normal load command included. By ignoring the height and constructing a virtual output signal from the integration of normal overload, the nonlinear system was fully linearized and input/output decoupling was achieved. The modified model was deduced and then a sliding mode tracking controller was designed. Simulation results indicate that the proposed control method can accurately track normal load commands. hypersonic vehicle; cruise flight control; feedback linearization; parameter uncertainty 2015-02-05; 2015-05-25; 時間:2015-06-24 15:03 趙林東(1986-),男,四川通江人,博士研究生,研究方向為高超聲速飛行器建模與控制; 唐勝景(1959-),男,吉林九臺人,教授,博士,主要從事飛行器設(shè)計和飛行力學(xué)研究。 V249.1 A 1002-0853(2015)06-0532-05




3 仿真與分析

4 結(jié)束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
