一種基于半脈組積累的雷達(dá)目標(biāo)方位修正方法
2015-03-23 02:38:58尚偉科孫元峰張金元
艦船電子對(duì)抗 2015年2期
尚偉科,左 斌,孫元峰,張金元
(中國(guó)電子科技集團(tuán)公司第38研究所,合肥 230088)
?
一種基于半脈組積累的雷達(dá)目標(biāo)方位修正方法
尚偉科,左 斌,孫元峰,張金元
(中國(guó)電子科技集團(tuán)公司第38研究所,合肥 230088)
提出了一種基于半脈組積累的雷達(dá)目標(biāo)方位修正方法,通過(guò)在動(dòng)目標(biāo)檢測(cè)(MTD)處理之前進(jìn)行方位校正,可以有效減小回波的方位誤差,為后續(xù)的點(diǎn)跡凝聚和航跡跟蹤提供有效保證。該算法簡(jiǎn)單實(shí)用,易于工程實(shí)現(xiàn)。文章的最后提供了實(shí)測(cè)雷達(dá)數(shù)據(jù)的信號(hào)處理結(jié)果,證實(shí)了該方法的有效性。
動(dòng)目標(biāo)檢測(cè);點(diǎn)跡提取;方位精度;半脈組積累
0 引 言
在雷達(dá)技術(shù)指標(biāo)中,方位精度是一項(xiàng)非常重要的內(nèi)容。點(diǎn)跡的方位精度直接影響到終端點(diǎn)航跡相關(guān)和航跡跟蹤,從而影響到雷達(dá)的整機(jī)性能。因此,點(diǎn)跡的方位精度問(wèn)題一直受到雷達(dá)界學(xué)者和工程師們的廣泛重視,并涌現(xiàn)了大量的研究成果[1-3]。這些工作主要集中在點(diǎn)跡凝聚模塊中的方位凝聚算法,以期提高凝聚點(diǎn)跡的方位精度[4-5]。
為了適應(yīng)對(duì)低慢小目標(biāo)探測(cè)、反二次回波、抗有源干擾等需要,現(xiàn)代雷達(dá)的時(shí)序不再是簡(jiǎn)單的單一模式,長(zhǎng)短脈沖組合、脈組脈間自適應(yīng)捷變頻等成為最新雷達(dá)常用的波形模式[6]。在得益復(fù)雜時(shí)序模式帶來(lái)優(yōu)勢(shì)的同時(shí),隨之而來(lái)的問(wèn)題如回波的方位抖動(dòng)等必須引起研究人員的重視。
另一方面,由于在信號(hào)處理的前端,碼盤所報(bào)的回波方位是實(shí)時(shí)的波束中心方位(并不是每個(gè)回波的真實(shí)方位),由此會(huì)引起較大的回波方位誤差。經(jīng)典的動(dòng)目標(biāo)檢測(cè)(MTD)理中,一般采用全脈組積累以提高積累得益,而生成的積累信號(hào)一般選用脈組中某一指定被積累回波的方位,然后送給點(diǎn)跡模塊做后續(xù)處理。這就引起了一個(gè)問(wèn)題:在點(diǎn)跡凝聚的前端,回波方位很可能已經(jīng)產(chǎn)生了較大的誤差。再經(jīng)由點(diǎn)跡方位凝聚的誤差積累,非常不利于后端的點(diǎn)航跡相關(guān)和穩(wěn)定跟蹤。
針對(duì)以上問(wèn)題,本文提出了一種基于半脈組積累的目標(biāo)方位修正方法,實(shí)現(xiàn)了對(duì)回波信號(hào)的方位校正,從而在點(diǎn)跡凝聚的前端有效減小了誤差,為提高點(diǎn)跡的方位精度、點(diǎn)航跡準(zhǔn)確相關(guān)以及穩(wěn)定跟蹤提供了保證。
1 問(wèn)題描述
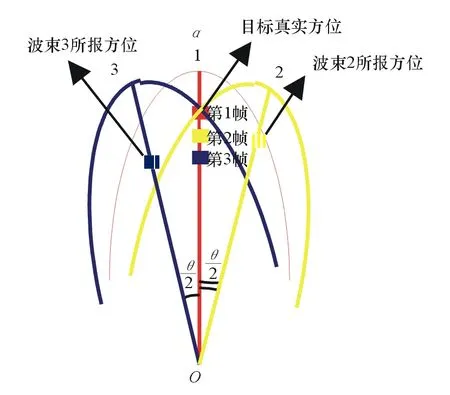
圖2 徑向飛行的目標(biāo)3幀方位示意圖
2 一種基于半脈組積累的目標(biāo)方位修正方法
由上小節(jié)的分析可以看到,造成回波方位誤差的原因在于誤將波束中心方位當(dāng)作了目標(biāo)回波方位,而事實(shí)上兩者之間有最大為半個(gè)波束寬度甚至更大的誤差。所以希望能提出一種方法,能夠估計(jì)出目標(biāo)回波相對(duì)于波束中心的實(shí)際偏置角,然后將碼盤方位實(shí)時(shí)地修正到目標(biāo)回波的真正方位。
假設(shè)目標(biāo)在一個(gè)相參處理間隔(CPI)周期內(nèi)的雷達(dá)橫截面積(RCS)以及其他外部環(huán)境變化忽略不計(jì),則目標(biāo)回波功率僅僅取決于天線的發(fā)射和接收增益。圖3所示為在1個(gè)CPI內(nèi)收到的同一目標(biāo)的6個(gè)待積累脈沖回波。在傳統(tǒng)MTD處理時(shí),采用全脈組積累,通常選取第1個(gè)回波的方位(碼盤方位)作為積累之后的目標(biāo)方位。這里在作MTD之前,先采用半脈組處理,將整個(gè)脈組平均分為前后兩部分,然后分別積累。可以看出,在第1種情況下,前半個(gè)脈組的積累信號(hào)功率小于后半個(gè)脈組;第2種情況下,前半個(gè)脈組的積累信號(hào)基本等于后半個(gè)脈組;第3種情況下,前半個(gè)脈組的積累信號(hào)大于后半個(gè)脈組。于是通過(guò)比較前半個(gè)脈組與后半個(gè)脈組的信號(hào)強(qiáng)度,就可以確定回波落在波束中心的大致位置。所以,由于波束掃描造成信號(hào)的收發(fā)增益不同,結(jié)合天線水平方向圖“方位-增益”測(cè)試數(shù)據(jù),計(jì)算出波束每個(gè)方位位置上對(duì)應(yīng)的半脈組增益差參考值,完成“方位-半脈組增益差”對(duì)照表,通過(guò)插值,便可以確定回波相對(duì)于波束中心的準(zhǔn)確方位角。
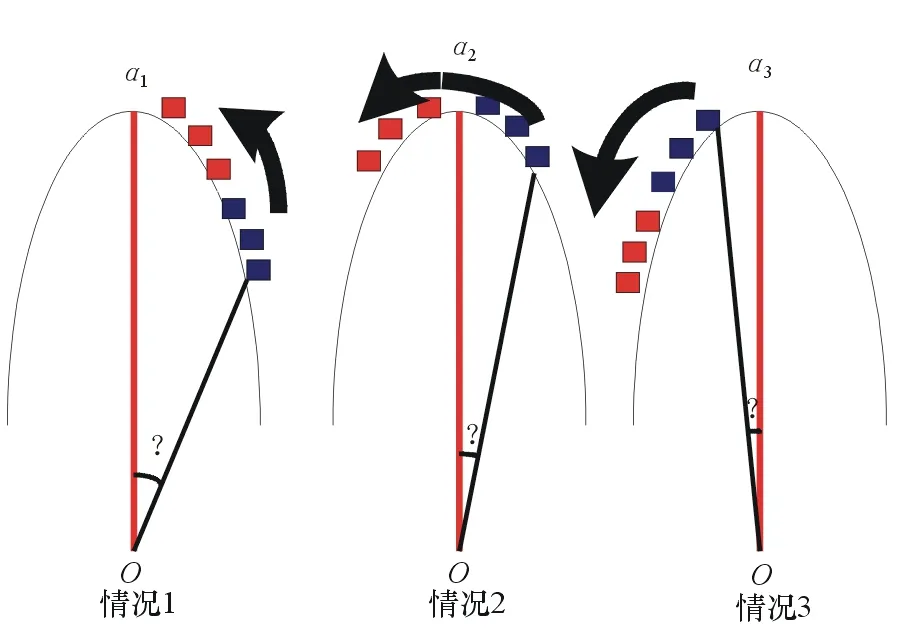
圖3 1個(gè)脈組的脈沖回波相對(duì)于波束的位置
3 算法流程
假設(shè)在一個(gè)CPI周期中某脈組共有2n(或者2n+1)個(gè)脈沖,目標(biāo)所在距離為R(km),天線周期為N(s/rad),脈沖重復(fù)周期為T(ms),前、后半脈組(各n個(gè)脈沖)的功率積累值分別為G1,G2(dB)。假定天線中心與波束中心重合,該脈組時(shí)序觸發(fā)時(shí),第1個(gè)脈沖發(fā)射對(duì)應(yīng)的碼盤方位為α(°),則算法步驟如下:
STEP2:將天線“方位-增益”表錯(cuò)位φ,然后兩表相加,得到該距離目標(biāo)對(duì)應(yīng)的“方位-發(fā)射接收增益和”對(duì)照表。


STEP6:根據(jù)G1-G2的值,對(duì)照STEP5得出的“方位-半脈組增益差”對(duì)照表進(jìn)行插值,得到全脈組的第1個(gè)脈沖相對(duì)于波束中心的方位ΔΨ,則α+ΔΨ就是目標(biāo)的真實(shí)方位。
4 實(shí)驗(yàn)驗(yàn)證
該算法已被應(yīng)用于最新研制的某新型雷達(dá)信號(hào)處理系統(tǒng)模塊。為了減小信號(hào)處理的計(jì)算負(fù)擔(dān),同時(shí)考慮到方位誤差在遠(yuǎn)區(qū)表現(xiàn)較為嚴(yán)重,將上述算法的STEP1簡(jiǎn)化為在大于1/2威力的適當(dāng)距離處統(tǒng)一計(jì)算收發(fā)時(shí)延造成的收發(fā)增益錯(cuò)位,這樣就避免了對(duì)每個(gè)目標(biāo)每一幀的實(shí)時(shí)計(jì)算,大大減小了信號(hào)處理的計(jì)算量。在方位范圍取值上,一般取2~3倍波束寬度范圍,精度0.01°步進(jìn)即可。
針對(duì)該型雷達(dá)參數(shù),統(tǒng)一在大約2/3威力距離處計(jì)算了收發(fā)時(shí)延造成的收發(fā)增益錯(cuò)位,并通過(guò)仿真計(jì)算證實(shí)了由此造成的估計(jì)誤差不大于0.05°,在可接受的范圍內(nèi)。按照上節(jié)算法流程得到的“方位-半脈組增益差”如圖4所示。
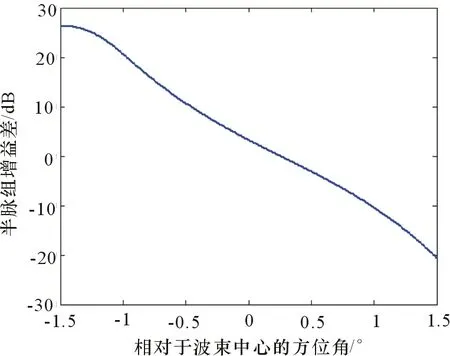
圖4 由某新型雷達(dá)參數(shù)計(jì)算出的方位-半脈組增益差(0.01°步進(jìn))
通過(guò)上述算法流程的插值校正,在該雷達(dá)的信號(hào)處理平臺(tái)上運(yùn)行實(shí)測(cè)數(shù)據(jù),得到10幀的方位修正效果。圖5表示不啟用半脈組方位修正時(shí)10幀回波信號(hào)處理效果;圖6表示同一批數(shù)據(jù)在啟用半脈組方位修正時(shí)10幀回波信號(hào)處理效果。

圖5 不啟用半脈組方位修正時(shí)10幀回波信號(hào)處理效果
為了便于對(duì)比,放大了PPI顯右上角4批徑向

圖6 啟用半脈組方位修正時(shí)10幀回波信號(hào)處理效果
飛行的目標(biāo)回波處理情況,可見基于半脈組積累的方位修正方法大大減小了回波的方位誤差,可以顯著提高后續(xù)點(diǎn)跡處理的精度和航跡跟蹤的穩(wěn)定性。
5 結(jié)束語(yǔ)
本文提供了一種基于半脈組積累的回波方位修正算法,通過(guò)在MTD之前按照該方法進(jìn)行方位修正,可以顯著減小目標(biāo)回波的方位誤差,有效提高后續(xù)的點(diǎn)跡方位精度,有利于點(diǎn)航跡相關(guān)和目標(biāo)跟蹤。該方法簡(jiǎn)單可靠,計(jì)算復(fù)雜性小,已在某新型雷達(dá)信號(hào)處理系統(tǒng)中得到了實(shí)際應(yīng)用。如何設(shè)計(jì)智能自適應(yīng)算法,減小隨機(jī)誤差,進(jìn)一步提高修正精度,是我們下一步研究的方向。
[1] 段志宏.電掃描恒差測(cè)向體制中方位的計(jì)算方法[J].艦船電子對(duì)抗,1994(6):17-23.
[2] 張鴻喜,于明成.頻率捷變對(duì)目標(biāo)陣列精位控制的影響[J].艦船電子對(duì)抗,2007,30(4):33-35.
[3] 曲洪旭.地面警戒雷達(dá)準(zhǔn)確的方位標(biāo)定方法[J].艦船電子對(duì)抗,2008,31(5):95-77.
[4] 李川.利用凝聚點(diǎn)跡來(lái)分析雷達(dá)的探測(cè)精度[J].雷達(dá)科學(xué)與技術(shù),2003,1(2):80-83.
[5] 楊春海.如何提高米波雷達(dá)的方位精度[J].雷達(dá)科學(xué)與技術(shù),2007,5(3):171-174.
[6] Skolnik M I.雷達(dá)手冊(cè)[M].中國(guó)電子科技集團(tuán)公司第14研究所譯.北京:電子工業(yè)出版社,2003.
A Revision Approach for Radar Target Azimuth Based on Semi-burst Accumulation
SHANG Wei-ke,ZUO Bin,SUN Yuan-feng,ZHANG Jin-yuan
(No.38 Research Institute of CETC,Hefei 230088,China)
This paper presents a revision approach for radar target azimuth based on semi-burst accumulation.Through the azimuth revision before motive target detection (MTD),the echo azimuth error can be remarkably reduced,which effectively guarantees the successive plot extraction and flight tracking.The algorithm is simple and applicable,and easy to be realized.In the end,the signal processing results of actual radar data are provided to demonstrate the validity of the approach.
motive target detection;plot extraction;azimuth precision;semi-burst accumulation
2014-12-22
國(guó)家科技支撐計(jì)劃重點(diǎn)項(xiàng)目,項(xiàng)目編號(hào):2011BAH24B06
TN957.51
A
CN32-1413(2015)02-0030-03
10.16426/j.cnki.jcdzdk.2015.02.009
