基于模糊算法的少齒差齒輪多目標優化設計
2015-03-30 01:46:55龔發云
湖北工業大學學報 2015年4期
龔發云,錢 坤,湯 亮
(湖北工業大學機械工程學院,湖北 武漢 430068)
基于模糊算法的少齒差齒輪多目標優化設計
龔發云,錢 坤,湯 亮
(湖北工業大學機械工程學院,湖北 武漢 430068)
基于優化設計模糊算法的基本理論,研究少齒差行星減速器的運行狀態及相關工況條件,針對少齒差齒輪副的傳動特性,建立少齒差行星輪減速器的數學模型,通過確立齒輪體積和重合度的目標函數,優化少齒差行星輪的幾何參數,并與常規設計相比,少齒差行星傳動的體積和重合度都得到優化。
模糊算法; 少齒差; 優化設計; 目標函數
立體車庫在使用中需要保證機構緊湊、承載性能好、運轉平穩等特點,而少齒差行星傳動的一些優點使其能夠很好滿足立體車庫的需求,少齒差齒輪傳動由于其傳動比大、結構緊湊、效率高,同時其運載平穩噪音小、承載能力大,在很多大型承載機械裝置中都有應用。范元勛,王華坤等基于遺傳算法對少齒差行星傳動的體積和嚙合角進行了參數優化設計,使其結構在緊湊的同時減少了徑向力,其壽命得以提高[1]。林尚飛等人通過基于MATLAB優化工具箱對少齒差行星齒輪的嚙合效率進行了優化,提高了其傳動效率[2]。一般的少齒差行星傳動的設計計算沒有相關的計算守則,同時計算相對較復雜,傳統的設計方法根據材料的物理機械性能,采用材料力學的彈性理論進行計算,沒有充分考慮材料機械性能參數的離散性影響,要么其工作可靠度不夠,要么造成材料浪費,因此只有在考慮全部變量的離散性和約束條件模糊性基礎上進行優化計算,才能夠保證設計出更為合理的少齒差傳動機構[3]。本文通過選擇合適的優化算法對其體積和重合度進行優化,使其達到體積小、傳動平穩、承載高、效率高等要求,從而更好地滿足立體車庫減速系統的需要。
1 少齒差齒輪傳動特點
以少齒差行星減速器中的少齒差齒輪為優化對象(圖1),在內齒輪與行星輪之間的齒數差為1~4之間時,就把這種齒輪傳動裝置稱為少齒差行星齒輪傳動。其包括一個太陽輪(K)、一個行星架(H)和一根輸出軸(V),所以這種輪系又稱為K-H-V型行星輪系。其傳動比公式為
(1)
故
ih1=-z1/(z2-z1)
(2)
由上式可見,當齒數((z1-z2)很小時,就可以得到較大的單機傳動比,當z2-z1=1時,ih1=-z1,稱這種齒輪傳動為一齒差傳動[4]。
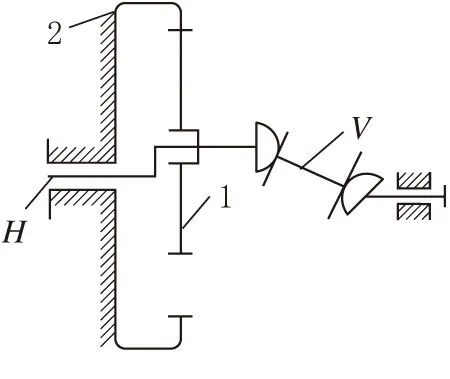
圖 1 少齒差行星傳動的基本形式
2 優化設計數學模型的建立
2.1 目標函數
日常的生產應用一般要求少齒差齒輪傳動裝置體積小、質量輕,以便節約制造材料降低成本。同時還需要兼具效率高、噪聲小和振動小,這些又與齒輪傳動的重合度有直接關聯。因此本文以體積最小為第一優化目標、以高重合度為第二優化目標來構建少齒差齒輪傳動優化的目標函數。即
f1(x)=v,f2(x)=ε.
(3)
(4)
(5)

第二目標函數為重合度。重合度是衡量齒輪傳動的平穩性的重要指標,對于減震降噪具有重要研究意義。
f2(x)=ε=
(6)
式中:α′為嚙合角;z1,z2和αa1,αa2分別為行星輪和內齒輪的齒數及齒頂圓壓力角。其中
(7)
(8)
齒頂高縮短系數
σ=λ-(x2-x1)
(9)
中心距變動系數
(10)
2.2 設計變量

X=[x1,x2,x3,x4,x5,x6,x7]T=
(11)
2.3 約束條件的建立
2.3.1 強度約束條件 由于本文的工況條件為重載傳動,所以少齒差行星傳動在滿足體積小的同時,又要滿足齒根彎曲疲勞強度和接觸疲勞強度的要求。根據已有的參考文獻和設計手冊齒根彎曲疲勞強度
(12)
齒面接觸疲勞強度
ZH·ZE≥0
(13)
K=KAKVKαKβ
(14)
式中:KA為使用系數;KV為動載系數;Kα為載荷分配系數;Kβ為齒向載荷分布系數。
[σF]、[σH]分別為許用彎曲應力和許用接觸應力,φd為齒寬系數,T為輸入扭矩,YFa為齒形系數,YSa為應力校正系數,u為傳動比,ZH為區域系數,在本文中取α=20°,所以取ZH=2.5,ZE為彈性影響系數,z為齒數,m為模數。這些系數值都可以根據具體的工況和材料查表選取。
2.3.2 性能及幾何約束條件
頂隙約束條件
g3(x)=rj2-C*m-ra1≥0
(15)
式中C*為頂隙系數;rj2為內齒輪齒根圓半徑;ra1為行星輪齒頂圓半徑。
少齒差行星傳動中由于兩齒輪齒數相差很少,在非嚙合區容易產生齒廓重疊干涉,因此必須防止產生重疊干涉[5]。
g4(x)=z1(invαa1+δ1)-
z2(invαa2+δ2)+(z1-z2)invα'≥0
(16)

為保證少齒差行星傳動平穩,其重合度g5(x)=ε-1≥0。
為保證重載傳動中齒根的彎曲疲勞強度,參照設計手冊,其模數m應大于3。即g6=m-3≥0。
其小齒輪做懸臂布置,參照設計手冊[6],其齒寬系數0.2≤Φd≤0.6。
從以上目標函數及約束條件可知,少齒差行星傳動的優化設計數學模型為
min[f1(x)-f2(x)]
X=[x1,x2,x3,x4,x5,x6,x7]
s.tgj(x)≥0j=1,2,…,7
3 優化求解
當目標函數和優化函數有模糊參數時,其約束函數和目標函數就既有其本身的模糊性又會有其邊界的模糊和各目標相互間的模糊性,所以用一般的多目標優化方法去解決問題常常會有一定的局限性[7],本文研究對象可以采用多目標模糊優化設計法,把式(1)的數學模型轉化為
x=[x1,x2,…,xn]∈X?Rn
maxα(x)
s.t.β(x)≥λ
(18)
式中β(x)為模糊約束集合的滿足度;λ為給定的模糊約束的設防水平。
在[0,1]區間上取一系列的λ值,即可獲得一系列不同設計水平的最優設計方案,它們構成了模糊問題的優化設計解集。本優化模型求解步驟如下。

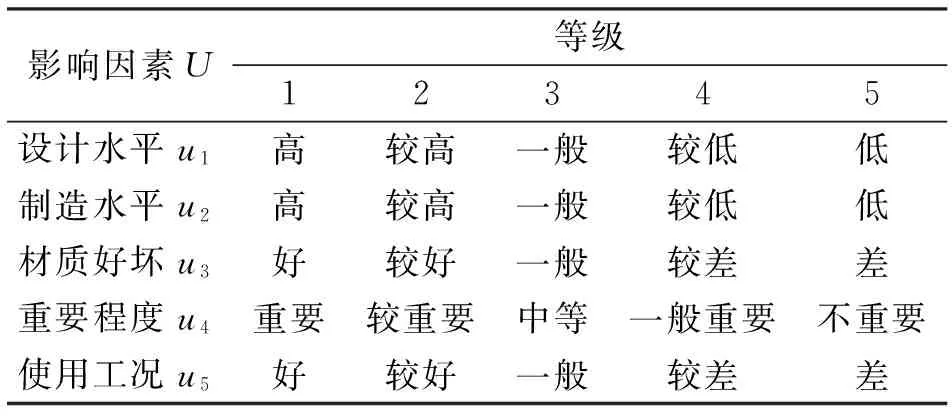
表1 影響因素及等級劃分
2)選擇備擇集。由于評判對象截集水平λ取值范圍在[0,1]之間,根據設計要求及使用情況其備擇集取
3)確定各因素的權重集。按表1中的5個使用及制造因素,根據具體情況取其各因素的權重為
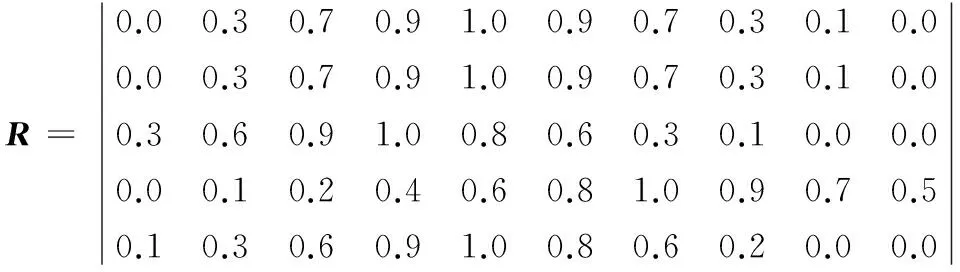
4)根據其制造水平、設計水平和材料屬性等,確定其評判矩陣
5)根據權重集合評判矩陣求出模糊綜合評判集,從而得到最優截集水平λ*。
通過加權平均法求出最優截集水平
因此得到最優截集水平集λ*=0.75,把模糊問題轉換為一般的優化問題。
6)通過一般的優化設計數學模型,把原始數據及工況條件輸入電腦,通過MATLAB普通線性約束計算得到優化結果[8]。表2為一般設計與模糊優化設計的對照表。
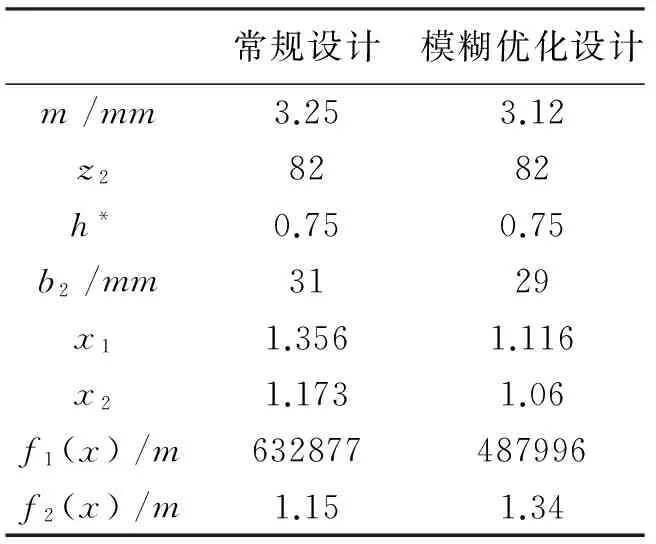
表2 優化設計對照表
通過表2,可知模糊優化設計后的體積比常規設計的體積減少了22.8%,其重合度提高了16.5%。
[1] 范元勛,王華坤. 基于遺傳算法的少齒差行星齒輪傳動參數優化設計[J].機械設計與制造工程,2002,31(06):16-18.
[2] 林尚飛. 漸開線少齒差行星傳動的多目標優化設計[J].制造業自動化,2012,34(05):32-34.
[3] 殷素峰,廖新根,何 偉.K-H-V型少齒差行星輪系在鉆掘機械中的優化設計[J].煤礦機械,2007,28(12):19-21.
[4] 孫 桓.機械原理[M].北京:高等教育出版社,2006:229-230.
[5] 吳學群. 艦載天線座少齒差行星減速器的優化設計[J].電子機械工程,2005,21(03):43-45.
[6] 濮良貴,紀明剛.機械設計[M].北京:高等教育出版社,2006:204-205.
[7] 陳立周.機械優化設計方法[M].北京:冶金工業出版社,2011:235-255.
[8] 呂俊峰,陳小安,趙孟娜. 基于改進神經網絡的少齒差行星齒輪參數優化設計[J]. 重慶理工大學學報(自然科學),2012,26(02):55-59.
[責任編校: 張 眾]
Multi-objectve Optimization Design of Differential Gear with Few Tooth Based on Fuzzy Algorithm
GONG Fayun,QIAN Kun,TANG Liang
(SchoolofMechanicalEngin.,HubeiUniv.ofTech.,Wuhan430068,China)
Based on the basic theory of optimization design of fuzzy algorithm, this paper mainly researches the running state of fewer teeth difference planetary gears reducer and its relevant working conditions. Taking advantage of the transmission characteristic of gear pair with small teeth difference, the authors built a mathematical model of planetary gear reducer and optimized the geometric parameters of few-tooth-difference planetary wheel by establishing the objective function of gear size and contact ratio. Besides, after comparing the results obtained from the normal design with the results of optimization design of fuzzy algorithm, the authors find that both gear size and contact ratio of fewer teeth difference planetary transmission were optimized.
fuzzy algorithm ;few tooth difference ;optimum design ;objective function
2015-04-20
龔發云(1964-),男,湖北鄂州人,湖北工業大學教授,研究方向為機械設計及輕工機械設計
1003-4684(2015)04-0051-03
TH122
A
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16