行星滾柱絲杠副齒輪變位系數的優化
2015-03-30 01:46:55楊家軍朱繼生
湖北工業大學學報 2015年4期
關鍵詞:優化
高 揚, 楊家軍,梁 漢,鄧 波, 朱繼生
(1 華中科技大學機械科學與工程學院,湖北 武漢 430074;2 中船重工七二二研究所, 湖北 武漢 430072; 3 山東博特精工股份有限公司,山東 濟寧 272071)
行星滾柱絲杠副齒輪變位系數的優化
高 揚1, 楊家軍1,梁 漢1,鄧 波2, 朱繼生3
(1 華中科技大學機械科學與工程學院,湖北 武漢 430074;2 中船重工七二二研究所, 湖北 武漢 430072; 3 山東博特精工股份有限公司,山東 濟寧 272071)
變位系數是行星滾柱絲杠副設計的重要參數,將內齒圈和滾柱端齒的變位系數作為設計變量,通過對其失效形式的分析,確定優化設計的目標函數;通過對幾何結構分析,確定一系列約束條件,建立變位系數的優化數學模型,采用復合形法求解方法獲得最佳變位系數。
行星滾柱絲杠; 齒輪; 變位系數; 復合形法
行星滾柱絲杠是一種將旋轉運動轉換為線性運動的機械裝置。它與滾珠絲杠相比,具有承載能力大、效率高、壽命長等特點,目前已被廣泛應用于數控機床、工業機器人、航空航天等領域。行星滾柱絲杠副內部結構較為復雜,部件精度、可靠性要求高,其嚙合齒變位系數的優化也一直是其設計過程中的重要問題,現實中常常因為變位系數選擇不當,造成產品精度達不到要求或可靠性不高。為進一步優化行星滾柱絲杠副性能,須探索一個更合理的設計方法解決這個問題。
1 行星滾柱絲杠的傳動原理分析
行星滾柱絲杠主要由絲杠、滾柱、螺母、內齒圈、保持架等組成(圖1)[1]。
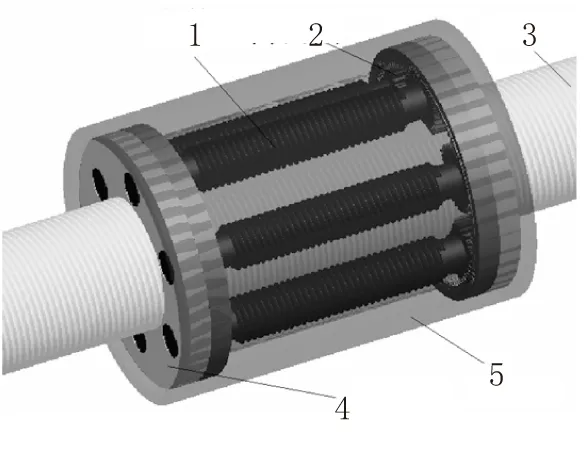
1-滾柱2-內齒圈;3-絲杠;4-保持架;5-螺母
其工作原理為:絲杠、滾柱和內齒圈可以分別視為太陽輪、行星輪和中心輪,當螺母周向固定而絲杠旋轉時,滾柱圍繞絲杠做行星運動,通過滾柱與絲杠的螺旋傳動,把絲杠的回轉運動轉換為螺母的直線運動。滾柱端齒輪可以保證絲杠、螺母與滾柱間嚙合傳動的同步性,避免發生干涉,也可以在高速重載的時候減輕螺紋傳動的負荷[2]。
行星滾柱絲杠副的機構簡圖如圖2所示。
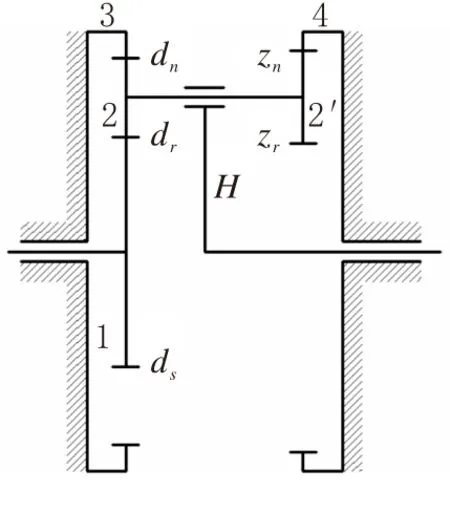
1-絲杠 2-滾柱;3-螺母;2′ -滾柱端齒輪(行星齒輪);4-內齒圈齒輪(與2’嚙合);H-滾柱絲杠副的螺紋副;dn-內齒圈齒的公稱直徑;dr-滾柱端齒的公稱直徑;ds-絲杠的公稱直徑;zn-內齒圈齒的齒數;zr-滾柱端齒的齒數
圖 2 行星滾柱絲杠副機構簡圖
2 變位系數的選擇原則
從避免失效的角度來確定變位系數的選擇原則。行星滾柱絲杠作為高速重載的傳動部件,其內齒圈和滾柱端齒輪在工作中可能會出現齒面點蝕、齒面膠合、磨損等多種失效形式。綜合分析,其變位系數的選擇有以下三個原則:
1) 為了盡可能提高滾柱端齒輪和內齒圈的接觸強度,避免齒面點蝕等失效形式,應使嚙合點齒廓綜合曲率半徑增大,即相嚙合齒的變位系數之和應盡量大;
2)為了盡可能提高滾柱端齒輪和內齒圈的彎曲強度,避免輪齒折斷等失效形式,應使相嚙合齒輪的彎曲強度趨于平衡,并盡量減小齒形系數,相應地限制了變位系數;
3)為了盡可能提高齒面抗膠合和耐磨性能,應使嚙合齒在嚙合過程中滑動系數盡量相等,相應地限制了變位系數。
3 目標函數的建立
根據行星滾柱絲杠副滾柱端齒和內齒圈變位系數的選擇原則,可以確定變位系數優化過程的目標函數[3]。
考慮到嚙合齒的接觸強度,應使變位系數之和盡量大,由無側隙嚙合方程可導出目標函數
(1)
式中:α為分度圓壓力角,取20°;α′為嚙合角;z1為內齒圈齒數;z2為滾柱端齒齒數。
考慮到齒輪彎曲強度,應使嚙合齒彎曲強度趨于平衡,可得目標函數為
minf2(x)=σF1-σF2
(2)

考慮到提高齒面抗膠合和耐磨性能,應使嚙合齒在嚙合過程中滑動系數盡量相等,滑動系數是滑動弧與齒廓所走過的弧長比。目標函數為
minf3(x)=η1-η2
(3)
在該優化問題中,內齒圈的變位系數x1和滾柱端齒的變位系數x2是相關的,故可取x1為設計變量,其他參數為x1的函數,則總目標函數為
minf(x1)=
-w1(x1+x2)|w2(σF1-σF2)|w3(η1-η2)
(4)
式中,wi(i=1,2,3)為加權因子,表示分目標函數的重要程度。
為了求解方便,將此多目標規劃問題化為單目標規劃問題,過程如下。
1)采用函數y=x/2π-sinx(0≤x≤2π),將分目標函數轉化為規格化目標函數。
式中qi、pi分別為設計指標的上下限。
2)利用容限法求解加權因子。目標容限Δfi=(qi-pi)/2(i=1,2,3),目標函數的加權因子wi=1/(Δfi)2(i=1,2,3)。所以原目標函數式(4)可以改寫為
minf(x1)=
-w1fr1(x1)+w2fr2(x1)+w3fr3(x1)
(5)
4 約束條件的確定
為了確保滾柱絲杠副穩定運行,不發生干涉,并具有一定的可靠性和壽命。根據行星滾柱絲杠副的幾何結構,可以確定優化過程的約束條件[6-7]。
1)齒頂圓大于基圓約束
(6)
(7)

2)重合度約束
(8)
式中:αa1為內齒圈齒頂圓的壓力角;αa2為滾柱端齒齒頂圓的壓力角。
3)齒廓干涉約束
g4(x1)=z1(δ1+invαa1)-z2(δ2+invαa2)
+(z2-z1)invα′≥0.05
(9)
4)齒頂距約束
g5(x1)=Ra2-Ra1+a′-0.1m≥0
(10)
式中:Ra1為內齒圈齒頂圓半徑,Ra2為滾柱端齒齒頂圓半徑;a′為嚙合中心距;m為模數。
5)齒根隙約束
g6(x1)=Ra2-Rf1-a′-0.1m≥0
(11)
式中,Rf1為內齒圈齒根圓的半徑。
5 復合形法的求解
由以上分析可得,求解x1的數學模型為
minf(x1)
gu(x1)≤0(u=1,2,…,6)
(12)
復合形法是求解約束優化問題的直接方法之一,是無約束最優化問題單純形法的推廣。由于該優化問題只有不等式約束,所以可以用該方法求解,求解步驟如下。

2)設置初始復合形頂點數為9,在可行域內產生分布均勻的偽隨機數,以確定復合形的其中一個頂點,檢查這個點是否在可行域內,如果不在,則需要重新選點。用同樣的方法產生全部的頂點;
5)計算反射點函數值,若反射點在可行域內,則與最壞點的函數值比較,根據結果調整反射點,直到滿足約束條件。
重復步驟3)-5),直到各頂點的距離達到精度要求為止。
6 應用示例
采用上述理論方法,對如表1所示國外某型號行星滾柱絲杠進行優化設計。
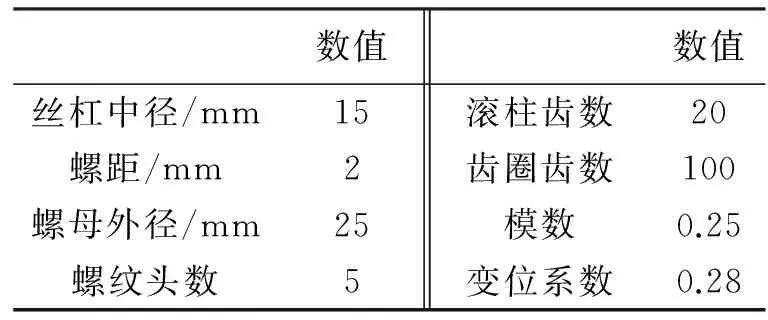
表1 國外某型號行星滾柱絲杠副基本參數
經編程計算得到:
2.68≤f1(x1)≤5.38,0≤f2(x1)≤33.2,0≤f3(x1)≤3.08;同時可以得到w1=0.35,w2=0.01,w3=0.81;經過優化得到:x1=0.21,x2=-0.16。優化后的參數在滿足約束條件的前提下,實現了目標函數最優。
7 結束語
本文采用行星滾柱絲杠副內齒圈和滾柱端齒變位系數的優化方法,在確保行星滾柱絲杠副穩定運行的同時,最大限度提高其齒輪部分的壽命和可靠性,從而提高了行星滾柱絲杠副在高速重載條件下的工作能力,降低了設計成本,減少了設計周期,為行星滾柱絲杠的設計提供了一種較為有效的方法。
[1] 劉 更,馬尚君,佟瑞庭,等.行星滾柱絲杠副的新發展及關鍵技術[J]. 機械傳動,2012,36(05):103-108.
[2] 韋振興,楊家軍,朱繼生,等.行星滾珠絲杠副的結構參數優化分析[J]. 機械傳動,2011,35(06):103-108.
[3] 邱宣懷.機械設計[M].北京:高等教育出版社,1991:167-204.
[4] 孟彩芳.機械原理電算分析與設計[M].天津:天津大學出版社,2000:144-159.
[5] 張春燕,唐迎春,姚文席.三環減速器內嚙合變位系數的研究[J].北京石油化工學院學報,2008,16(01):31-34.
[6] 余躍海.少齒差內嚙合齒輪的計算機輔助幾何設計及參數優化[D].天津:天津大學,2005.
[7] 羅中華.最優化方法及其在機械行業中的應用[M].北京:電子工業出版社,2008:91-94.
[責任編校: 張 眾]
Optimization of Planetary Roller Screw Gear Modification Coefficient
GAO Yang1, YANG Jiajun1, LIANG Han1, DENG Bo2, ZHU Jisheng3
(1SchoolofMechanicalSci.andEngin.,HuazhongUniv.ofSci.andTech.,Wuhan430074,China;2 722ResearchInstituteofCSIC,Wuhan430079,China;3ShandongBESTPresionCO.LTD,Jining272071,China)
The modification coefficient, an important parameter for the design of planetary roller screw, The modification coefficient of internal gear ring and roller end gear was used as design variables in this paper. The objective function of optimization design was determined through analyzing the failure mode. Based on the analysis of geometric structure, a series of constraints were determined, and then an optimization mathematical model of variable coefficient was established. By using the complex method, the best modification coefficient can be determined.
planetary roller screw; gear; modification coefficient; complex method
2015-04-20
高 揚(1991-),男,河南濮陽人,華中科技大學碩士研究生,研究方向為智能機械與數字化裝備
1003-4684(2015)04-0058-03
TH13
A
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45