基于雙LCL諧振補(bǔ)償?shù)碾妱?dòng)汽車無(wú)線充電系統(tǒng)特性分析與實(shí)驗(yàn)驗(yàn)證
2015-04-06 02:09:54葛樹(shù)坤蔡國(guó)偉
電工技術(shù)學(xué)報(bào) 2015年15期
關(guān)鍵詞:系統(tǒng)
劉 闖 郭 贏 葛樹(shù)坤 蔡國(guó)偉 周 飛
(1.東北電力大學(xué)電氣工程學(xué)院 吉林 1320122.國(guó)網(wǎng)智能電網(wǎng)研究院 北京 102200)
?
基于雙LCL諧振補(bǔ)償?shù)碾妱?dòng)汽車無(wú)線充電系統(tǒng)特性分析與實(shí)驗(yàn)驗(yàn)證
劉 闖1郭 贏1葛樹(shù)坤1蔡國(guó)偉1周 飛2
(1.東北電力大學(xué)電氣工程學(xué)院 吉林 1320122.國(guó)網(wǎng)智能電網(wǎng)研究院 北京 102200)
針對(duì)滿足電動(dòng)汽車車載無(wú)線充電要求的雙LCL諧振補(bǔ)償網(wǎng)絡(luò)進(jìn)行研究與分析。首先分析電動(dòng)汽車無(wú)線充電的電磁耦合關(guān)系及4種基本諧振補(bǔ)償網(wǎng)絡(luò)特性;然后基于雙LCL諧振補(bǔ)償?shù)墓ぷ魈匦裕接懛治鲈陔妱?dòng)汽車無(wú)線充電發(fā)射端與接收端發(fā)生橫向及縱向相對(duì)偏移時(shí)的工作特性;最后通過(guò)Ansoft,針對(duì)圓盤型電磁耦合結(jié)構(gòu)進(jìn)行三維有限元仿真,并搭建一個(gè)5.5 kW的雙LCL諧振補(bǔ)償實(shí)驗(yàn)系統(tǒng),對(duì)在縱向距離200 mm(最大橫向偏移120 mm)和無(wú)橫向偏移(縱向距離150~250 mm)時(shí)的工作特性進(jìn)行驗(yàn)證。該系統(tǒng)在縱向距離200 mm(無(wú)橫向偏移)時(shí),最大功率傳輸能力為5.5 kW,同時(shí)達(dá)到最大效率點(diǎn)95.37%。
電動(dòng)汽車 無(wú)線充電 雙LCL諧振補(bǔ)償 單位功率因數(shù)
0 引言
近年來(lái),隨著能源危機(jī)以及環(huán)境問(wèn)題日趨嚴(yán)重,混合動(dòng)力汽車和純電動(dòng)汽車(Electric Vehicles,EVs)因其環(huán)保優(yōu)勢(shì)引起人們廣泛關(guān)注[1]。EV充電包括有線充電和無(wú)線充電兩種方式。目前,通常采用有線充電,即EVs通過(guò)導(dǎo)線與電網(wǎng)相連進(jìn)行充電,充電功率從1 kW到19.8 kW。無(wú)線充電或無(wú)線供電(Wireless Power Transfer,WPT)通過(guò)高頻磁場(chǎng)耦合透過(guò)空氣隙將能量從車外發(fā)射端傳遞到車載接收端[2]。相對(duì)于有線充電,WPT有如下優(yōu)勢(shì):
1)便捷:WPT系統(tǒng)可自動(dòng)完成充電。當(dāng)EV停靠在充電裝置發(fā)射端上方時(shí),EV開(kāi)始自動(dòng)充電,不需要人們手動(dòng)連接充電線。
2)安全:WPT系統(tǒng)無(wú)有線充電時(shí)的金屬接觸,無(wú)插拔電線電弧現(xiàn)象及觸電危險(xiǎn)。有線充電電線放置在地面上易絆倒行人,特別是在公共停車場(chǎng)充電時(shí)。
3)環(huán)境適應(yīng)性強(qiáng):WPT系統(tǒng)發(fā)射端線圈安裝于地下,接收端安裝于EV底部,能夠適應(yīng)多種惡劣天氣和環(huán)境,比如雨雪天氣。
目前EVs無(wú)線充電裝置基本采用感應(yīng)式(Inductive Power Transfer,IPT)WPT,IPT系統(tǒng)通過(guò)發(fā)射端與接收端線圈的松散電磁耦合,將能量透過(guò)一定縱向空氣距離(1~20 cm)從發(fā)射端傳遞到接收端[3]。要保證系統(tǒng)最大功率傳輸強(qiáng)度,期望發(fā)射端一直處于最大勵(lì)磁狀態(tài),保持發(fā)射端線圈電流恒定。目前WPT系統(tǒng)中,接收端常采用并聯(lián)諧振補(bǔ)償網(wǎng)絡(luò),使得接收端反饋到發(fā)射端的功率中含有無(wú)功分量,且隨負(fù)載的增大而增大,發(fā)射端與接收端的導(dǎo)線銅損和開(kāi)關(guān)損耗都將增大。此外無(wú)功分量的大小隨接收端與發(fā)射端的橫向偏移變化而變化,不易控制[4];同時(shí)接收端采用并聯(lián)諧振時(shí),還需要一個(gè)很大的續(xù)流電感,使成本增加。因此本文采用雙LCL諧振補(bǔ)償方式,該結(jié)構(gòu)的優(yōu)點(diǎn)是發(fā)射端與接收端都具有恒流特性以及單位功率因數(shù);逆變器只需要提供負(fù)載和損耗的純有功功率,便于實(shí)現(xiàn)逆變器的ZVS及整流器的ZCS,降低損耗,提高系統(tǒng)效率。
本文首先簡(jiǎn)單說(shuō)明了EVs用WPT的基本組成及WPT系統(tǒng)中4種基本LC諧振補(bǔ)償電路;然后基于雙LCL諧振補(bǔ)償電路,分析了發(fā)射端和接收端工作特性;最后根據(jù)理論分析設(shè)計(jì)實(shí)驗(yàn)裝置參數(shù),并通過(guò)Ansoft有限元分析和5.5 kW實(shí)驗(yàn)測(cè)試系統(tǒng)驗(yàn)證雙LCL諧振補(bǔ)償WPT縱向和橫向偏移時(shí)的工作特性:系統(tǒng)發(fā)射端恒流特性和單位功率因數(shù);接收端單位功率因數(shù)以及確定位置時(shí)的恒流特性;諧振補(bǔ)償結(jié)構(gòu)中各原件電壓電流隨負(fù)載變化的趨勢(shì)和橫向與縱向偏移時(shí)系統(tǒng)輸出功率以及效率變化。
1 電動(dòng)汽車無(wú)線充電的系統(tǒng)結(jié)構(gòu)及諧振補(bǔ)償
1.1 典型的EVs用WPT系統(tǒng)結(jié)構(gòu)
典型的EVs 用WPT系統(tǒng)結(jié)構(gòu)如圖1所示。首先通過(guò)AC-DC變換器將電網(wǎng)的交流電整流到直流;然后通過(guò)DC-AC逆變電路將直流逆變成高頻(10~150 kHz)的方波交流電,經(jīng)過(guò)發(fā)射端諧振補(bǔ)償電路,發(fā)射端線圈中產(chǎn)生恒定的勵(lì)磁電流,接收端線圈通過(guò)感應(yīng)發(fā)射端線圈形成的高頻強(qiáng)磁場(chǎng)得到感應(yīng)電動(dòng)勢(shì)(AC);最后,通過(guò)AC-DC整流器給EV電池充電[5]。
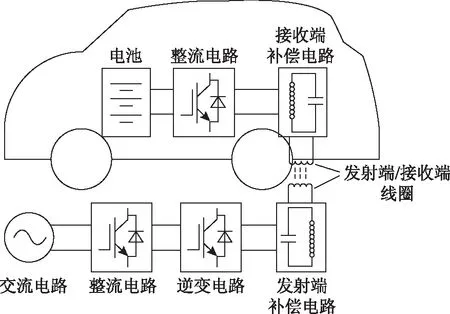
圖1 典型的EV用WPT系統(tǒng)Fig.1 Typical WPT system for EV charging
1.2 諧振補(bǔ)償網(wǎng)絡(luò)分析
在WPT系統(tǒng)中,發(fā)射端與接收端線圈之間屬于松弛耦合,漏感較大,耦合率低,耦合率K可定義為
(1)
式中:L1和L2分別為發(fā)射端和接收端線圈自感;M為發(fā)射端與接收端互感。所以WPT系統(tǒng)需要通過(guò)諧振補(bǔ)償電路降低伏安容量以及提高功率傳輸能力[6,7]。早期,IPT系統(tǒng)中只在一側(cè)設(shè)置諧振補(bǔ)償電路[8],但EV用WPT系統(tǒng)中,耦合率一般在0.2左右,在兩側(cè)分別補(bǔ)償能夠提升傳輸能力。根據(jù)諧振電容與線圈連接方式的不同可分為4種基本補(bǔ)償電路,即串聯(lián)串聯(lián)(Series-Series,SS)、串聯(lián)并聯(lián)(Series-Parallel,SP)、并聯(lián)串聯(lián)(Parallel-Series,PS)、并聯(lián)并聯(lián)(Parallel Parallel,PP)[9,10],如圖2所示。
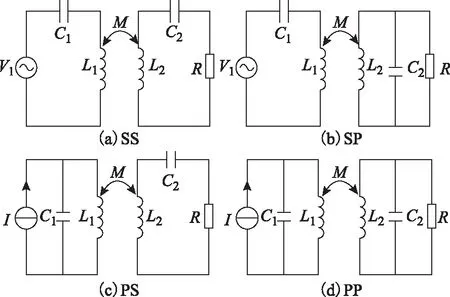
圖2 4種基本補(bǔ)償電路Fig.2 Four basic compensation topologies
發(fā)射端串聯(lián)補(bǔ)償時(shí),發(fā)射端線圈可直接與電壓源連接,并聯(lián)補(bǔ)償時(shí),電壓后端需要串聯(lián)電感將電壓源轉(zhuǎn)換成電流源,再與發(fā)射端線圈連接。當(dāng)發(fā)射端線圈電流恒定,接收端并聯(lián)補(bǔ)償時(shí)輸出可近似看成電壓源,接收端串聯(lián)補(bǔ)償時(shí)輸出可近似看成電流源。為了降低伏安容量及系統(tǒng)損耗,實(shí)現(xiàn)變換器軟開(kāi)關(guān)即ZVS或ZCS,需要通過(guò)諧振補(bǔ)償電路的作用,使逆變器輸出電壓與電流同相位,即電源部分只需提供純有功功率。因此,在逆變器開(kāi)關(guān)頻率下,需要保證逆變器輸出電流與電壓無(wú)相角差,即零相位角(Zero-Phase-Angle,ZPA)[11]。

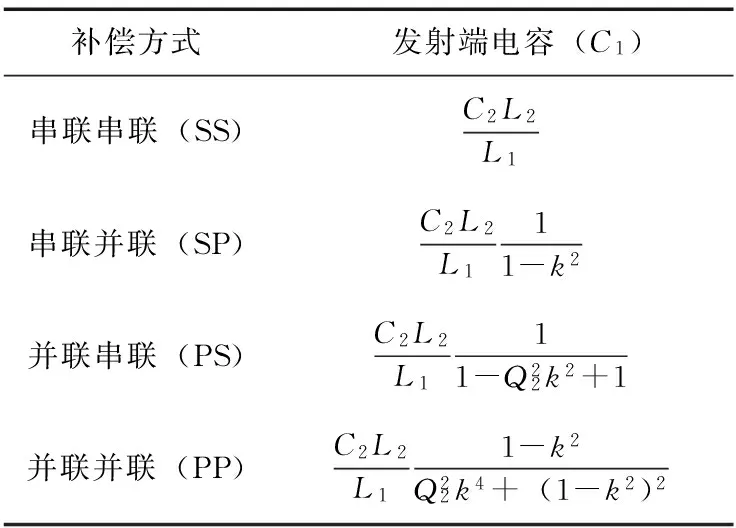
表1 發(fā)射端諧振補(bǔ)償電容Tab.1 Primary resonant compensation capacitance
WPT系統(tǒng)中發(fā)射端通常采用LCL諧振補(bǔ)償電路,在諧振頻率下,發(fā)射端線圈表現(xiàn)出恒流特性,不隨負(fù)載和耦合率的變化而變化,發(fā)射端時(shí)刻工作在最大激磁狀態(tài);接收端通常采用并聯(lián)諧振網(wǎng)絡(luò)[13,14]。但是,接收端采用并聯(lián)諧振網(wǎng)絡(luò)時(shí),線圈中含有無(wú)功分量,且此無(wú)功分量會(huì)隨負(fù)載、橫向和縱向偏移的變化而變化,并通過(guò)互感反饋到發(fā)射端。為了解決接收端并聯(lián)補(bǔ)償?shù)倪@些問(wèn)題,奧克蘭大學(xué)提出了一種單位功率因數(shù)接收端[15],在接收端也采用LCL諧振補(bǔ)償結(jié)構(gòu),實(shí)現(xiàn)接收端的恒流輸出與單位功率因數(shù)。所以,采用雙LCL諧振補(bǔ)償?shù)脑O(shè)計(jì),WPT系統(tǒng)發(fā)射端線圈電流保持恒定,發(fā)射端將時(shí)刻處于最大勵(lì)磁狀態(tài);接收端采用LCL諧振補(bǔ)償結(jié)構(gòu)時(shí),能夠?qū)崿F(xiàn)恒定的電流輸出與單位功率因數(shù),發(fā)射端逆變器只需提供純有功功率,便于實(shí)現(xiàn)逆變器ZVS及整流器ZCS、系統(tǒng)損耗小、效率高,詳細(xì)分析過(guò)程將在第3部分說(shuō)明。
2 基于雙LCL補(bǔ)償?shù)腤PT工作特性分析
基于雙LCL諧振補(bǔ)償?shù)腤PT系統(tǒng)拓?fù)浣Y(jié)構(gòu)如圖3所示,其中Lp、C1、C1s、L1構(gòu)成發(fā)射端LCL諧振補(bǔ)償電路;Ls、C2、C2s、L2構(gòu)成接收端LCL諧振補(bǔ)償電路;M為發(fā)射端與接收端互感。
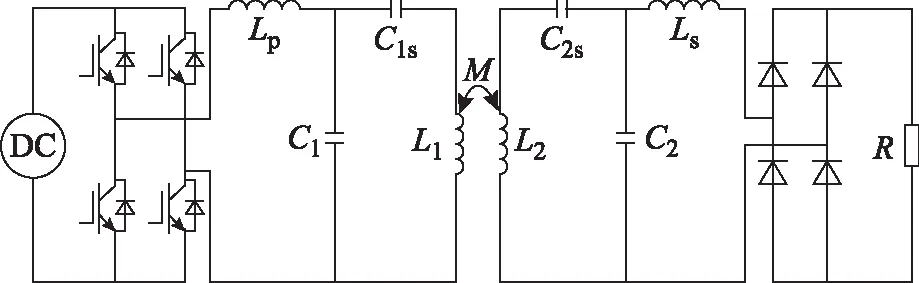
圖3 雙LCL 補(bǔ)償WPT系統(tǒng)原理圖Fig.3 Schematic diagram of double LCL network based WPT system
2.1 發(fā)射端LCL等效網(wǎng)絡(luò)特性分析
發(fā)射端LCL等效網(wǎng)絡(luò)電路如圖4所示,其中Rr為接收端反饋電阻,C1s用來(lái)補(bǔ)償一部分發(fā)射端線圈自感L1,來(lái)增大發(fā)射端線圈上的恒定電流,提高勵(lì)磁強(qiáng)度[16]。同時(shí)定義諧振頻率ω0和經(jīng)過(guò)C1s補(bǔ)償后的發(fā)射端線圈自感L1為L(zhǎng)
(2)
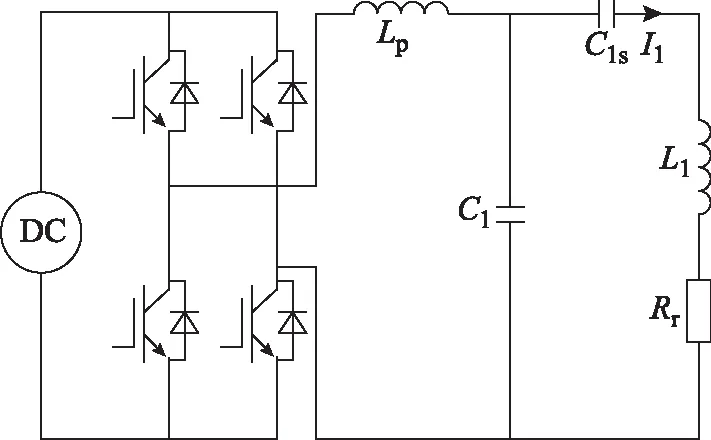
圖4 發(fā)射端LCL等效網(wǎng)絡(luò)電路Fig.4 LCL equivalent network circuit of transmitting terminal
開(kāi)關(guān)頻率ω與諧振頻率ω0的歸一化值ωn=ω/ω0,發(fā)射端品質(zhì)因數(shù)Q1=ω0Lp/Rr,L和Lp的比例λ=L/Lp。
電壓增益和發(fā)射端線圈電流分別為
(3)
(4)
發(fā)射端輸入阻抗為
(5)
設(shè)逆變器的輸出電壓Ui初相角為0°,逆變器輸出電流即流過(guò)電感Lp的電流為
(6)
(7)
則逆變器輸出電流電壓相角差可表示為
φ|ωn=1=arctan[Q1(λ-1)]
(8)
其大小與λ的關(guān)系為
φ|ωn=1=0λ=1
φ|ωn=1<0λ<1
φ|ωn=1>0λ>1
(9)
為了實(shí)現(xiàn)逆變器開(kāi)關(guān)管的ZVS,逆變器輸出電流相位要略滯后于電壓相位,使λ略小于1即可實(shí)現(xiàn)逆變器開(kāi)關(guān)管的ZVS。
2.2 接收端LCL等效網(wǎng)絡(luò)特性分析
接收端LCL等效網(wǎng)絡(luò)電路如圖5所示,與發(fā)射端LCL諧振電路類似,C2與經(jīng)過(guò)C2s補(bǔ)償后的接收端線圈自感L2和電感Ls在開(kāi)關(guān)頻率ω=ω0下分別諧振,定義經(jīng)過(guò)C2s補(bǔ)償后的接收端線圈自感L2為L(zhǎng)′,電感Ls的電抗值為X
L′=jωL2+1/jωC2s
X=ωLs
(10)
可得1-ω2LsC2=0,1-ω2L′C2=0,所以
X=ωLs=1/ωC1=ωL′
(11)
圖5中Vo是接收端線圈的感應(yīng)電動(dòng)勢(shì)[15],Vo=jωMI1。
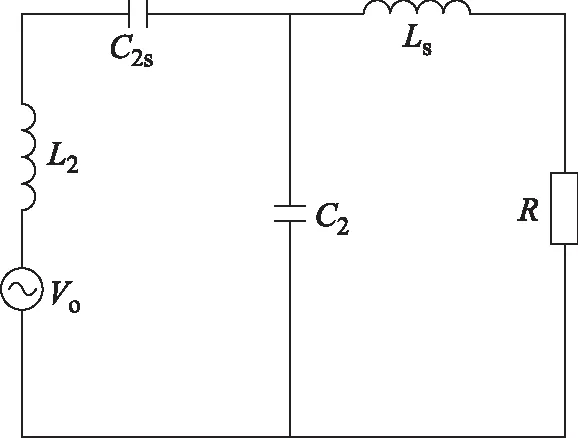
圖5 接收端LCL等效網(wǎng)絡(luò)電路Fig.5 LCL equivalent network circuit of receiving terminal
接收端輸入阻抗為
Z2=jωL2+1/jωC2s+1/jωC2//(jωLs+R)
(12)
根據(jù)接收端LCL諧振補(bǔ)償工作條件以及式(10)和式(11),式(12)簡(jiǎn)化為式(13)
(13)
接收端輸入阻抗Z2為純阻性。反饋到發(fā)射端的阻抗為
(14)
當(dāng)EVs接收端與發(fā)射端有橫向偏移時(shí),互感M大小改變,反射阻抗只是改變大小,仍保持純阻性,不會(huì)產(chǎn)生無(wú)功分量。
與接收端線圈自感L2串聯(lián)諧振的電容C2s,減小了電抗X,增大了接收端短路電流,提高了功率傳輸能力[15],且電流增益與負(fù)載無(wú)關(guān),定義為QI,QI=C2/C2s+1=L2/Ls,同時(shí)發(fā)射端的總品質(zhì)因數(shù)Q2可定義為
(15)
式中QV為電壓增益,定義為負(fù)載電壓與電路開(kāi)路電壓的比率,QV=R/X。通過(guò)調(diào)節(jié)諧振網(wǎng)絡(luò)參數(shù),可調(diào)節(jié)QI和QV,進(jìn)而滿足不同的負(fù)載要求,且兩者可獨(dú)立調(diào)節(jié)。負(fù)載電壓與電流為
(16)
負(fù)載電壓隨負(fù)載電阻的增大而增大,但用于EVs電池充電時(shí)會(huì)受到電池端電壓的鉗制,發(fā)射端輸出電流恒定,適合EV車載電池充電。
3 雙LCL補(bǔ)償諧振網(wǎng)絡(luò)設(shè)計(jì)分析
3.1 基于Ansoft的發(fā)射端與接收端設(shè)計(jì)驗(yàn)證
WPT系統(tǒng)的發(fā)射端與接收端采用常見(jiàn)的圓盤型設(shè)計(jì),EVs車載接收端的大小受汽車底盤大小的限制,另外為滿足電磁安全標(biāo)準(zhǔn),實(shí)際中接收端圓盤需要做的更小,一般不能超過(guò)1 m2[17]。本實(shí)驗(yàn)系統(tǒng)采用了一個(gè)直徑600 mm的圓盤方案,實(shí)驗(yàn)裝置和其Ansoft三維模型如圖6所示,磁心長(zhǎng)度、位置及線圈的內(nèi)外半徑遵循文獻(xiàn)[17]的優(yōu)化方案。每個(gè)長(zhǎng)條磁心都是由9個(gè) TDG公司I79/24/4 mm型磁心組成,三層疊加后連接在一起,線圈繞線采用2路13匝直徑4 mm的1050股的AWG38高頻線并聯(lián)方式。
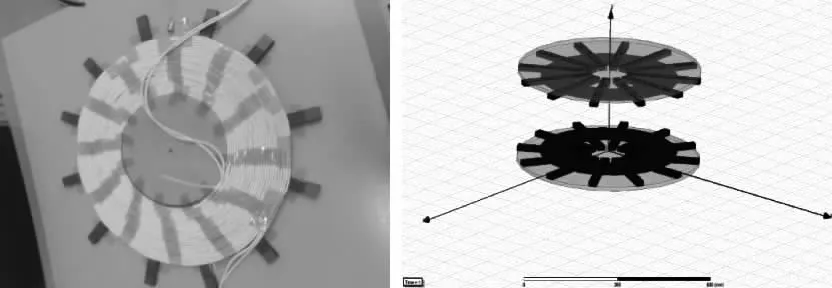
圖6 實(shí)驗(yàn)圓盤結(jié)構(gòu)和其三維模型Fig.6 Experimental circular pad structure and 3-D model
WPT系統(tǒng)最大傳輸功率為
(17)
式中:IS為接收端短路電流;PSU為接收端補(bǔ)償之前的伏安功率[18]。
在該實(shí)驗(yàn)系統(tǒng)中,發(fā)射端線圈電流限制在40 A,開(kāi)關(guān)頻率設(shè)定在30 kHz,接收端品質(zhì)因數(shù)限制在6[19],這些參數(shù)能很好地適應(yīng)現(xiàn)有的元件技術(shù)。一般汽車底盤與地面的距離約為20 cm,本設(shè)計(jì)也設(shè)定發(fā)射端線圈與接收端線圈之間的縱向距離為20 cm。基于以上參數(shù)條件,通過(guò)Ansoft軟件對(duì)磁通密度(沿通過(guò)磁心的直徑切面)進(jìn)行仿真分析,如圖7所示。
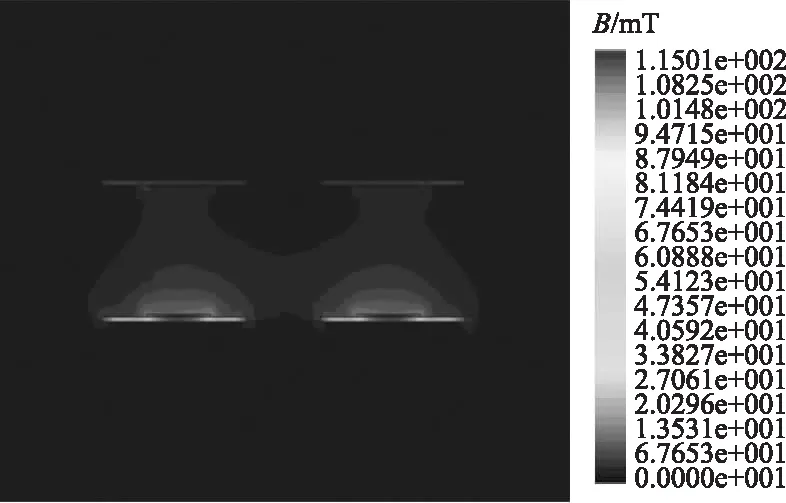
圖7 磁通密度Fig.7 Magnetic flux density
發(fā)射端激勵(lì)頻率為30 kHz、有效值為40 A時(shí),最大磁通密度為115 mT,而磁心理論最高磁通密度為300 mT,能夠滿足設(shè)計(jì)需求。如果減小磁心厚度,易發(fā)生磁飽和,因此為防止磁飽和降低磁滯損耗,選用3層磁心即12 mm厚。
發(fā)射端與接收端的橫向和縱向偏移會(huì)引起互感的變化,通過(guò)實(shí)際測(cè)量與Ansoft有限元仿真進(jìn)行對(duì)比發(fā)現(xiàn),誤差在5%以內(nèi),實(shí)驗(yàn)結(jié)果如圖8所示。圖中L11、L22、L12和K分別是實(shí)測(cè)發(fā)射端線圈自感、接收端線圈自感、兩線圈互感和耦合率,L11-F、L22-F、L12-F和K-F分別是通過(guò)Ansoft仿真得到的發(fā)射端線圈自感、接收端線圈自感、兩線圈互感和耦合率。
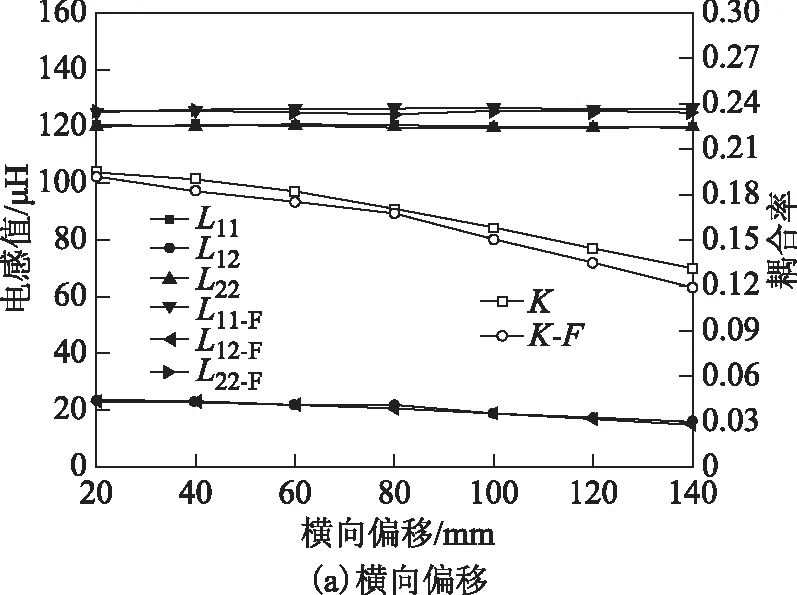
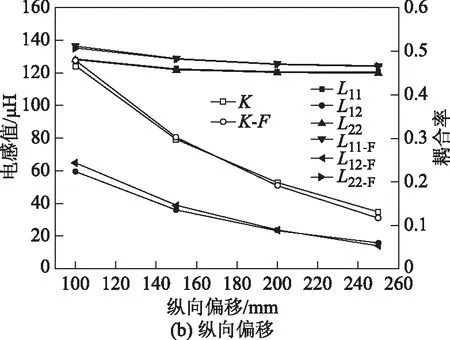
圖8 橫向/縱向偏移時(shí)參數(shù)變化Fig.8 Parameters’ variation for horizontal/vertical misalignment
由圖8分析可知,隨著橫向偏移的增大,互感值和耦合率逐漸降低,橫向偏移達(dá)到120 mm時(shí),互感M降低到無(wú)橫向偏移時(shí)的70%,由式(17)可知,傳輸功率會(huì)降低到50%。隨著縱向距離的增大,線圈自感降低很少,可近似認(rèn)為不變,但互感和耦合率逐漸降低,縱向偏移250 mm時(shí),互感降低為15.7 μH,耦合率降低為0.13。
3.2 雙LCL諧振補(bǔ)償網(wǎng)絡(luò)設(shè)計(jì)
結(jié)合對(duì)雙LCL拓?fù)浣Y(jié)構(gòu)的分析,并根據(jù)實(shí)驗(yàn)室現(xiàn)有元件搭建實(shí)驗(yàn)系統(tǒng),確定系統(tǒng)各元件參數(shù),見(jiàn)表2,實(shí)驗(yàn)裝置結(jié)構(gòu)如圖9所示。
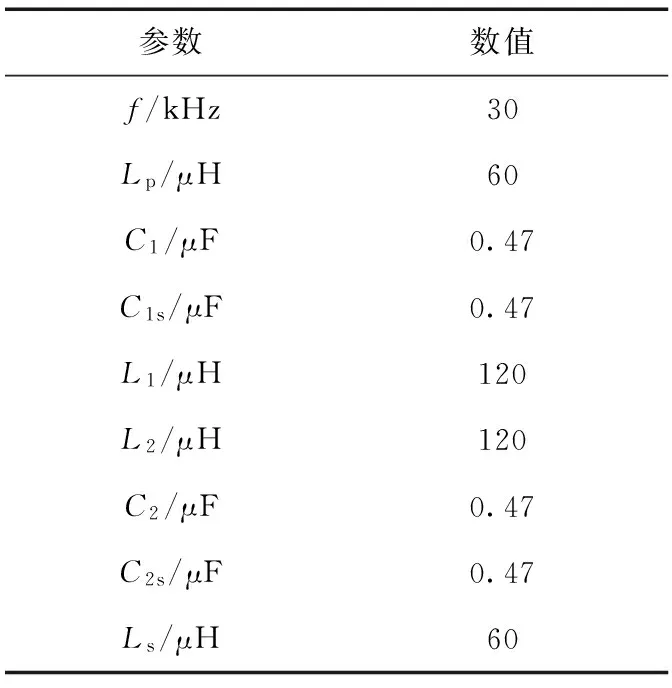
表2 發(fā)射端/接收端實(shí)驗(yàn)參數(shù)Tab.2 Experimental parameters of transmitting/receiving terminal

圖9 WPT實(shí)驗(yàn)裝置Fig.9 WPT experimental setup
4 工作特性實(shí)驗(yàn)分析
4.1 橫向特性分析
逆變器工作在諧振頻率,發(fā)射端與接收端之間間隔200 mm空氣隙(下同),無(wú)橫向偏移時(shí),逆變器輸出端電壓電流波形如圖10所示。可看出,逆變器輸出電流相位略滯后于逆變器輸出電壓,逆變器開(kāi)關(guān)管可實(shí)現(xiàn)ZVS。由于逆變器輸出電流相位滯后于逆變器輸出電壓很小,可近似認(rèn)為逆變器輸出電流電壓同相位,即實(shí)現(xiàn)了ZPA,逆變器只需提供有功功率,根據(jù)第3部分的理論分析可得出,接收端反饋到發(fā)射端的阻抗基本為純阻性,即接收端為單位功率因數(shù),與理論分析一致。
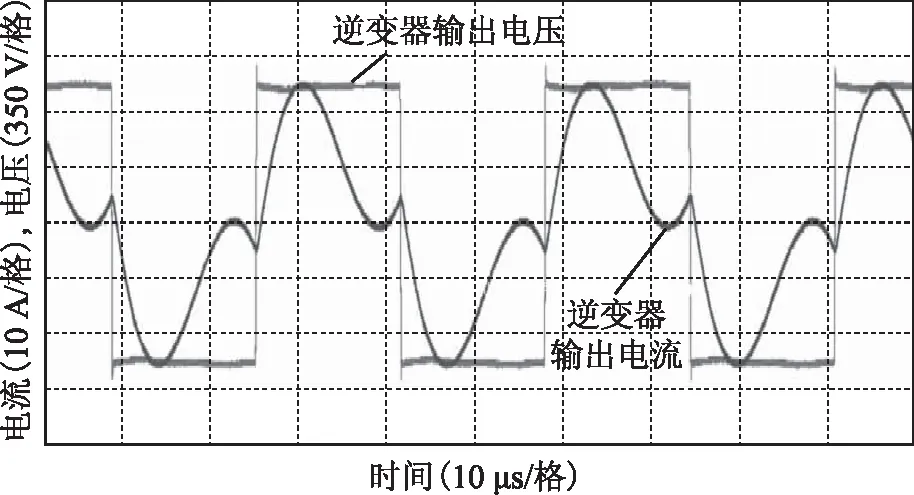
圖10 逆變器輸出端電壓電流波形Fig.10 The current and voltage experimental waveforms of the inverter
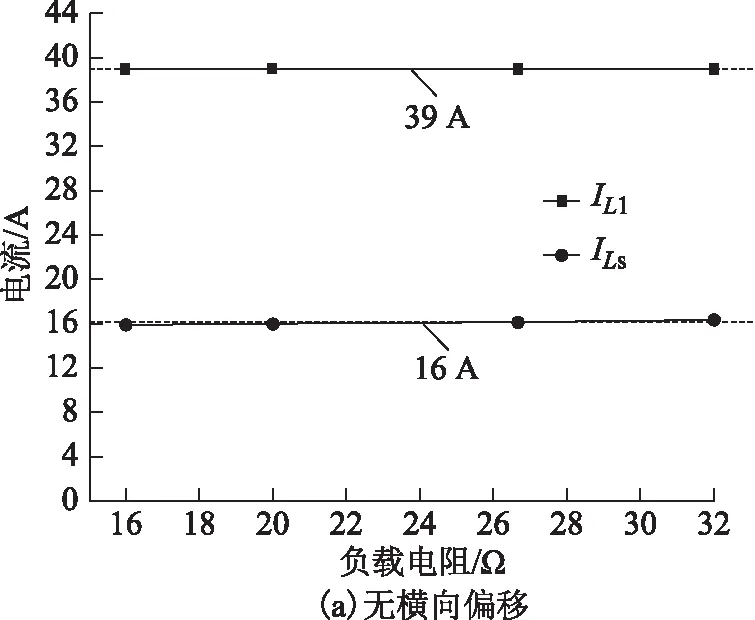

圖11 不同情況下L1和Ls實(shí)測(cè)電流Fig.11 The experimental current of L1 and Ls under different condition
圖11a為在無(wú)橫向偏移時(shí),發(fā)射端線圈電流和接收端Ls輸出電流隨負(fù)載變化的趨勢(shì)。可看出,發(fā)射端線圈和接收端輸出電流基本保持恒流特性,分別為39 A、16 A。圖11 b為發(fā)射端線圈電流和接收端Ls輸出電流隨橫向偏移變化的趨勢(shì)。可看出,發(fā)射端線圈電流仍基本保持恒流特性為39 A,發(fā)射端時(shí)刻處于最大勵(lì)磁狀態(tài),接收端輸出電流隨橫向偏移的增大逐漸減小,這是因?yàn)殡S橫向偏移的增大,系統(tǒng)互感減小,接收端感應(yīng)電動(dòng)勢(shì)降低,與第3部分分析一致。
由圖11可看出發(fā)射端線圈電流不隨負(fù)載以及橫向偏移的變化而變化,均為39 A,即發(fā)射端線圈電流時(shí)刻保持在39 A,系統(tǒng)發(fā)射端時(shí)刻處于最大勵(lì)磁狀態(tài);接收端輸出電流在接收端與發(fā)射端相對(duì)位置確定時(shí)也保持恒定,但接收端輸出電流會(huì)隨橫向偏移的增大而減小。
圖12為系統(tǒng)無(wú)橫向偏移時(shí),發(fā)射端和接收端LCL諧振補(bǔ)償結(jié)構(gòu)中各元件電壓電流隨負(fù)載增大的變化趨勢(shì)圖。隨著負(fù)載功率的增大,發(fā)射端線圈L1與電容C1s接收端電感Ls電壓電流保持不變,其他元件電壓電流均有增大趨勢(shì)。發(fā)射端與接收端中兩個(gè)線圈L1和L2兩端電壓最高,但均低于1 kV,滿足安全要求[5,7,12];流過(guò)兩個(gè)并聯(lián)電容C1和C1s的電流分別最大,應(yīng)根據(jù)電壓電流能力選擇適合的電容。
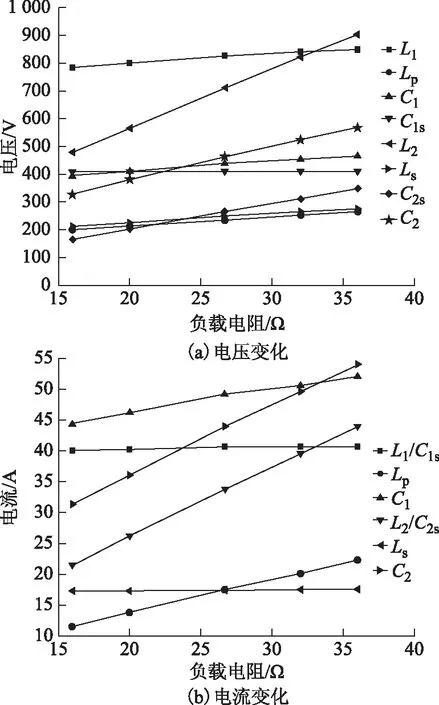
圖12 負(fù)載變化時(shí)無(wú)源元件電壓與電流有效值變化趨勢(shì)Fig.12 The voltage and current change trend of the passive components with the load change
圖13為無(wú)橫向偏移時(shí),輸出功率及效率隨負(fù)載變化趨勢(shì)圖,無(wú)橫向偏移時(shí),隨著負(fù)載的減小,系統(tǒng)效率逐漸降低。圖14為某些特定位置系統(tǒng)輸入輸出功率,其中圖14a為無(wú)橫向偏移時(shí)系統(tǒng)輸入輸出功率,系統(tǒng)效率為95.37%。圖15為橫向偏移變化時(shí),系統(tǒng)最大傳輸功率及效率變化圖,橫向偏移增大時(shí),系統(tǒng)最大功率傳輸能力隨之降低,且效率也減小,偏移達(dá)到120 mm時(shí),輸出功率降低到2.91 kW,效率降低到90.13%,如圖14b所示。

圖13 無(wú)橫向偏移時(shí)輸出功率和效率隨負(fù)載變化Fig.13 Output power and efficiency under different load conditions with no horizontal misalignment
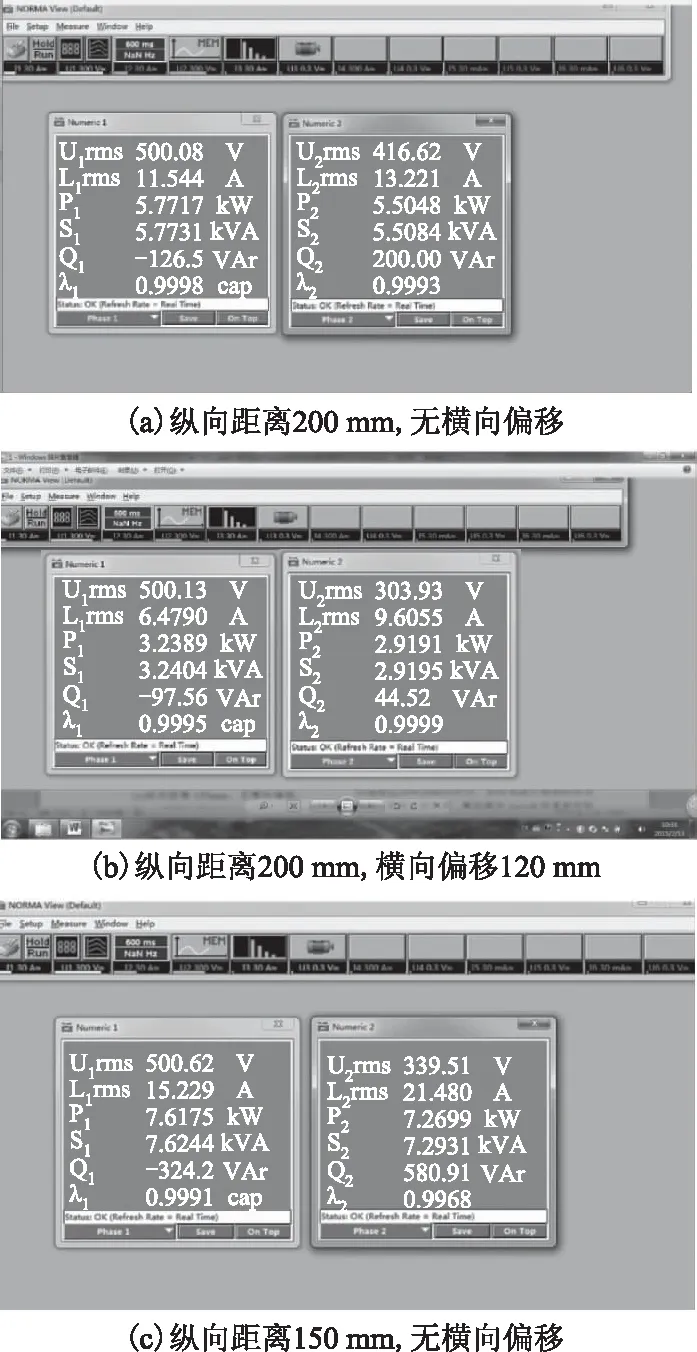
圖14 不同位置系統(tǒng)輸入輸出功率Fig.14 Input and output power at different positions
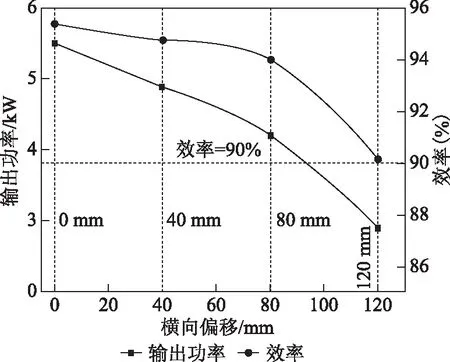
圖15 R=32 Ω時(shí)輸出功率和效率隨橫向偏移變化Fig.15 Output power and efficiency with different horizontal misalignment at R=32 Ω
4.2 縱向特性分析
圖16為發(fā)射端與接收端縱向距離變化時(shí),負(fù)載功率與效率的實(shí)測(cè)變化趨勢(shì)。根據(jù)圖10,隨發(fā)射端與接收端縱向距離的增大,系統(tǒng)耦合率逐漸降低,由式(17)可知系統(tǒng)功率傳輸能力隨之減小,與圖16中測(cè)試結(jié)果一致。縱向距離150 mm時(shí),由于實(shí)驗(yàn)條件的限制,負(fù)載功率只測(cè)試到7.26 kW,并未達(dá)到滿載,效率為95.45%,如圖14c所示;縱向距離250 mm時(shí),負(fù)載功率為2.3 kW,效率為91%。

圖16 輸出功率和效率隨縱向偏移變化趨勢(shì)Fig.16 Output power and efficiency with different vertical misalignment
5 結(jié)論
本文針對(duì)滿足EVs用WPT要求的雙LCL諧振補(bǔ)償網(wǎng)絡(luò),詳細(xì)分析了發(fā)射端和接收端的工作原理和特性,實(shí)現(xiàn)了發(fā)射端始終處于最大勵(lì)磁狀態(tài)以及接收端單位功率因數(shù)的特性,系統(tǒng)電源只需提供有功功率,損耗小、效率高。最后通過(guò)Ansoft仿真和實(shí)驗(yàn),驗(yàn)證了基于雙LCL諧振補(bǔ)償WPT系統(tǒng)橫向和縱向偏移時(shí)的工作特性。在縱向距離200 mm(無(wú)橫向偏移)時(shí)最大功率傳輸能力為5.5 kW,同時(shí)達(dá)到最大效率點(diǎn)95.37%。
[1] 曹玲玲,陳乾宏,任小永,等.電動(dòng)汽車高效率無(wú)線充電技術(shù)的研究進(jìn)展[J].電工技術(shù)學(xué)報(bào),2012,27(8):1-13. Cao Lingling,Chen Qianhong,Ren Xiaoyong,et al.Review of the efficient wireless power transmission technique for electric vehicles[J].Transactions of China Electrotechnical Society,2012,27(8):1-13.
[2] Casanova J J,Low Z N,Lin J.A loosely coupled planar wireless power system for multiple receivers[J].IEEE Transactions on Industrial Electronics,2009,56(8):3060-3068.
[3] 蔡華,史黎明,李耀華.感應(yīng)耦合電能傳輸系統(tǒng)輸出功率調(diào)節(jié)方法[J].電工技術(shù)學(xué)報(bào),2014,29(1):215-220. Cai Hua,Shi Liming,Li Yaohua.Output power adjustment in inductively coupled power transfer system[J].Transactions of China Electrotechnical Society,2014,29(1):215-220.
[4] 李國(guó)慶,王星宇,王鶴.微電網(wǎng)中分布式電源逆變器數(shù)字多環(huán)反饋控制方法[J].東北電力大學(xué)學(xué)報(bào),2014,34(1):39-46. Li Guoqing,Wang Xingyu,Wang He.Digital multiple-loop feedback control of distributed source inverter in microgrid[J].Journal of Northeast Dianli University,2014,34(1):39-46.
[5] Li S,Mi C C.Wireless power transfer for electric vehicle applications[J].IEEE Journal of Emerging and Selected Topics in Power Electronics,2015,3(1):4-17.
[6] Moradewicz A J,Kazmierkowski M P.Contactless energy transfer system with FPGA-controlled resonant converter[J].IEEE Transactions on Industrial Electronics,2010,57(9):3181-3190.
[7] Chwei-Sen W,Stielau O H,Covic G A.Design considerations for a contactless electric vehicle battery charger[J].IEEE Transactions on Industrial Electronics,2005,52(5):1308-1314.
[8] Jaegue S,Seungyong S,Yangsu K A.Design and implementation of shaped magnetic-resonance-based wireless power transfer system for roadway-powered moving electric vehicles[J].IEEE Transactions on Industrial Electronics,2014,61(2):1179-1192.
[9] Zhang W,Wong S C,Tse C K.Analysis and comparison of secondary series and parallel compensated inductive power transfer systems operating for optimal efficiency and load-independent voltage-transfer ratio[J].IEEE Transactions on Power Electronics,2014,29(6):2979-2990.
[10]Duan C,Jiang C,Taylor A,et al.Design of a zero-voltage-switching large-air-gap wireless charger with low electric stress for electric vehicles[J].IEEE Transactions on Power Electronics,2013,6(9):1742-1750.
[11]Pantic Z,Sanzhong B,Lukic S.ZCS LCC-compensated resonant inverter for inductive-power-transfer application[J].IEEE Transactions on Industrial Electronics,2011,58(8):3500-3510.
[12]Wu H H,Gilchrist A,Sealy K D,et al.A high efficiency 5 kW inductive charger for EVs using dual side control[J].IEEE Transactions on Industrial Informatics,2012,8(3):585-595.
[13]Tang C S,Sun Y,Su Y G,et al.Determining multiple steady-state ZCS operating points of a switch-mode contactless power transfer system[J].IEEE Transactions on Power Electronics,2009,24(2):416-425.
[14]Kissin M L G,Huang C Y,Covic G A.Detection of the tuned point of a fixed-frequency LCL resonant power supply[J].IEEE Transactions on Power Electronics,2009,24(4):1140-1143.
[15]Keeling N A,Covic G A,Boys J T.A unity-power-factor IPT pickup for high-power applications[J].IEEE Transactions on Industrial Electronics,2010,57(2):744-751.
[16]張炯,樓佩煌,錢曉明,等.基于雙LCL補(bǔ)償?shù)臒o(wú)接觸供電系統(tǒng)研究[J].電工技術(shù)學(xué)報(bào),2013,28(10):19-24. Zhang Jiong,Lou Peihuang,Qian Xiaoming,et al.Study of contactless power transfer system based on double LCL compensation[J].Transactions of China Electrotechnical Society,2013,28(10):19-24.
[17]Budhia M,Covic G,Boys J.Design and optimization of circular magnetic structures for lumped inductive power transfer systems[J].IEEE Transactions on Power Electronics,2011,99(11):2096-3108.
[18]Boys J T,Covic G A,Green A W.Stability and control of inductively coupled power transfer systems[J].IEE Proceedings Electric Power Applications,2000,147(11):37-43.
Characteristics Analysis and Experimental Verification of the Double LCL Resonant Compensation Network for Electrical Vehicles Wireless Power Transfer
LiuChuang1GuoYing1GeShukun1CaiGuowei1ZhouFei2
(1.Northeast Dianli University Electrical Engineering College Jilin 132012 China 2.China Smart Grid Research Institute Beijing 102200 China)
This paper presents the study and analysis of the wireless power transfer (WPT) system for electric vehicles (EVs) based on the double-LCL resonant network.The electromagnetic coupling relationship for the EVs WPT system and the features of four basic compensation networks are analyzed firstly.Then the characteristics of the transmitting and receiving terminals with the double-LCL resonant network for the EVs WPT system are discussed in detail under the horizontal or vertical misalignment conditions.Finally,the 3-D finite element analysis package Ansoft is utilized to verify the network.A 5.5 kW experimental system with circular pads is set up.Two conditions are discussed,i.e.200 mm air gap with 120 mm horizontal misalignment at most and no horizontal misalignment with air gaps ranging from 150 to 250 mm.Under the condition of 200 mm gap without horizontal misalignment,the experimental system can transfer the maximum power about 5.5 kW with the highest efficiency of 95.37%.
Electric vehicle,wireless power transfer,double-LCL resonant,unity-power-factor
國(guó)家自然科學(xué)基金(51307021)、吉林省自然科學(xué)基金(20140101076JC)和吉林省教育廳技術(shù)研究項(xiàng)目(2015238)資助。
2014-12-15 改稿日期2015-05-28
TM315
劉 闖 男,1985年生,博士,副教授,研究方向?yàn)殡娏﹄娮庸β首儞Q與空間無(wú)線電力傳輸技術(shù)等。(通信作者)
郭 贏 男,1990年生,碩士研究生,研究方向?yàn)榭臻g無(wú)線電力傳輸技術(shù)等。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
- 電工技術(shù)學(xué)報(bào)的其它文章
- 潛油電動(dòng)機(jī)隔磁段電磁-熱-力耦合特性研究
- 基于機(jī)會(huì)約束凸松弛的分區(qū)隨機(jī)無(wú)功備用優(yōu)化方法
- 基于功率靈敏度的線路過(guò)載劃區(qū)域緊急控制策略
- 基于模糊熵權(quán)Vague集的配電網(wǎng)檢修決策優(yōu)化
- 籠型感應(yīng)電動(dòng)機(jī)斷條故障前后轉(zhuǎn)子電磁力計(jì)算及結(jié)構(gòu)靜力學(xué)分析
- 無(wú)刷直流電動(dòng)機(jī)雙閉環(huán)調(diào)速系統(tǒng)的轉(zhuǎn)矩脈動(dòng)抑制研究