鋰離子電池建模及其荷電狀態(tài)魯棒估計
2015-04-06 02:09:56陳息坤陳小虎
電工技術(shù)學(xué)報 2015年15期
陳息坤 孫 冬,2 陳小虎
(1.上海大學(xué)機電工程與自動化學(xué)院 上海 2000722.鄭州輕工業(yè)學(xué)院 鄭州 450002)
?
鋰離子電池建模及其荷電狀態(tài)魯棒估計
陳息坤1孫 冬1,2陳小虎1
(1.上海大學(xué)機電工程與自動化學(xué)院 上海 2000722.鄭州輕工業(yè)學(xué)院 鄭州 450002)
鋰離子電池動態(tài)建模和荷電狀態(tài)估計是鋰電池管理系統(tǒng)的關(guān)鍵技術(shù)。針對鋰電池工作狀態(tài)受外部環(huán)境因素和負(fù)載變化的影響,以二階RC等效電路模型為基礎(chǔ),采用變遺忘因子最小二乘法辨識模型參數(shù)。針對鋰電池系統(tǒng)存在不確定性噪聲問題,提出基于離散H∞濾波的SOC魯棒估計方法,并與常用的擴(kuò)展卡爾曼濾波法進(jìn)行對比實驗研究。實驗結(jié)果表明,變遺忘因子最小二乘法可提高二階RC模型的性能,魯棒估計法可將鋰電池SOC的估計誤差控制在3%左右,具有較好的魯棒性。
鋰離子電池 荷電狀態(tài) 離散H∞濾波器 擴(kuò)展卡爾曼濾波器
0 引言
隨著電動汽車和微電網(wǎng)技術(shù)的發(fā)展,大量動力電池儲能裝置得到了廣泛應(yīng)用。鋰離子電池(簡稱鋰電池)具有循環(huán)壽命長、高溫性能好、穩(wěn)定性好、價格適中等優(yōu)勢,成為動力儲能裝置的首選[1]。鋰電池建模及其荷電狀態(tài)(State of Charge,SOC)估計,是儲能裝置中鋰電池組安全、可靠運行的保證,是鋰電池管理系統(tǒng)亟待解決的關(guān)鍵技術(shù)之一[1]。
由于鋰電池的非線性特性,且其受環(huán)境因素和負(fù)載工況影響較大(如環(huán)境溫度、放電深度(DOD)、充放電電流倍率、容量衰減等),如何建立能夠準(zhǔn)確反映鋰電池動態(tài)工作特性的模型,仍需做更深入的研究。可靠的鋰電池模型通常滿足以下要求:模型參數(shù)化過程簡便、參數(shù)辨識算法可靠、參數(shù)辨識準(zhǔn)確以及高效的計算過程[2]。目前常用的鋰電池模型主要分為電化學(xué)模型和等效電路模型[3]兩類。電化學(xué)模型是根據(jù)電池內(nèi)部電荷傳遞原理建立的數(shù)學(xué)模型,由一系列帶有邊界條件的偏微分方程構(gòu)成,因其從基本電化學(xué)原理上解釋了正負(fù)電極之間的動態(tài)傳質(zhì)過程,模型準(zhǔn)確度較高,但存在計算過程復(fù)雜及實現(xiàn)困難等缺點,雖然有學(xué)者提出了簡化的電化學(xué)模型,但仍不適用于實時系統(tǒng)[3]。等效電路模型(ECM)采用線性變參數(shù)建模的方法(LPV),使用理想電路元件(電阻、電容、可控電壓源等)模擬鋰電池動態(tài)工作特性,雖然模型準(zhǔn)確度無法與電化學(xué)模型相提并論,但其原理清晰、線性特性、計算簡便,且易于實時系統(tǒng)實現(xiàn)、便于進(jìn)行鋰電池狀態(tài)估計,得到了廣泛應(yīng)用[3,4]。
模型參數(shù)辨識是鋰電池建模中必不可少的步驟,且辨識方法的不同將直接影響模型的可靠性和準(zhǔn)確度。辨識方法通常分為在線辨識和離線辨識,分別對應(yīng)于在線建模和離線建模[3-5]。離線建模多采用參數(shù)查表法實現(xiàn),需大量鋰電池實驗數(shù)據(jù)支撐,因影響鋰電池的外部因素較多,建模過程耗時較長。相比之下在線建模所辨識參數(shù)隨著鋰電池負(fù)載和外部環(huán)境的變化而改變,更有利于工程實現(xiàn)。常見的鋰電池模型參數(shù)辨識方法主要有脈沖電流法、卡爾曼濾波法、最小二乘法等。脈沖電流法來源于《FreedomCAR功率輔助型電池測試手冊》中的HPPC測試方法,根據(jù)模型參數(shù)計算方法從實驗值中提取所需參數(shù)值,其主要應(yīng)用于離線建模[6];卡爾曼濾波法可用于在線建模,通常與鋰電池狀態(tài)估計聯(lián)合使用,但隨著辨識參數(shù)數(shù)量的增加,系統(tǒng)維數(shù)也相應(yīng)增大,算法計算量增大,不利于工程實現(xiàn)[5];最小二乘法是一種常用的參數(shù)辨識方法,可應(yīng)用于離線辨識和在線辨識,其遞推形式適用于在線辨識,此方法易于掌握、計算量較小、易實現(xiàn)。
常用鋰電池SOC估計方法主要有安時法、開路電壓法、電化學(xué)阻抗頻譜法(EIS)、神經(jīng)網(wǎng)絡(luò)法和卡爾曼濾波法等[7]。安時法和開路電壓法是最基本的方法,由于存在累積誤差,通常與其他方法聯(lián)合使用[7]。電化學(xué)阻抗頻譜法和神經(jīng)網(wǎng)絡(luò)法需要特殊的測試設(shè)備和大量實驗數(shù)據(jù)支持,主要用于實驗室研究[8]。卡爾曼濾波法[9]通常與安時法、開路電壓法聯(lián)合使用,因鋰電池非線性特性,常采用擴(kuò)展卡爾曼濾波(EKF)、無跡卡爾曼濾波(UKF)[10]、Sigma點卡爾曼濾波(SPKF)[11]等非線性濾波法,與鋰電池等效電路模型相結(jié)合,能實時預(yù)測鋰電池SOC,且算法易于實現(xiàn),因此得到廣泛應(yīng)用。但使用卡爾曼濾波法需假設(shè)對象噪聲為白噪聲,了解系統(tǒng)噪聲的均值、相關(guān)性和協(xié)方差矩陣,因鋰電池系統(tǒng)存在不確定性噪聲(如LPV模型非線性誤差、模型參數(shù)攝動、測量噪聲等),僅將噪聲信號看作高斯分布的白噪聲并不能滿足系統(tǒng)要求。
本文針對鋰電池建模中存在的問題,基于二階RC等效電路模型,研究采用了變遺忘因子最小二乘法(Variable Forgetting Factor Least Squares,VFFLS)辨識模型參數(shù);為解決不確定性噪聲帶來的鋰電池SOC估計問題,提出了基于離散H∞濾波的SOC魯棒估計方法,并與EKF法進(jìn)行了對比研究,實驗驗證了該方法的可行性。
1 鋰電池建模
1.1 鋰電池等效電路模型
常用鋰電池等效電路模型有Rint模型、PNGV模型、Thevenin模型、NERL模型、Randles模型和RC模型等[3]。前4種模型電路結(jié)構(gòu)單一、靈活性較差、模型準(zhǔn)確度受到限制。相比之下Randles模型和RC模型電路靈活、擴(kuò)展性較強,可根據(jù)實際應(yīng)用選取。Randles模型需依據(jù)EIS實驗數(shù)據(jù)建立,而RC模型通用性較強,由多個電阻和電容(RC)網(wǎng)絡(luò)串聯(lián)構(gòu)成,串聯(lián)RC網(wǎng)絡(luò)的數(shù)量越多(模型階數(shù)n越大),模型準(zhǔn)確度越高,計算量也相應(yīng)增大。本文在權(quán)衡了模型準(zhǔn)確度和實現(xiàn)算法復(fù)雜度的基礎(chǔ)上,選用二階RC等效電路模型,其電路原理圖如圖1所示[3,12]。
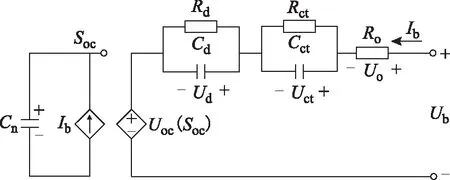
圖1 鋰電池二階RC等效電路模型Fig.1 Lithium-ion battery second-order RC equivalent circuit model
圖1中,Ub為鋰電池負(fù)載端電壓;Uoc(Soc)為鋰電池開路電壓,是SOC的非線性函數(shù),由可控電壓源表示;Ib為鋰電池充電電流,放電時為負(fù)值;Cn為鋰電池有效容量;Ro為鋰電池歐姆電阻;Rd、Rct和Cd、Cct分別為鋰電池的極化電阻和極化電容,下標(biāo)d和ct分別為此等效電路元件受濃差極化和活化極化效應(yīng)影響。
1.2 鋰電池狀態(tài)空間模型
根據(jù)二階RC等效電路模型,由基爾霍夫定理,可建立模型狀態(tài)方程,如式(1)所示。將此方程離散化,得到模型離散系統(tǒng)方程,如式(2)所示。
(1)
(2)
式中:系統(tǒng)狀態(tài)變量為xk=[Ud,kUct,kSoc,k]T;Ud,k、Uct,k分別為k時刻電容Cd和Cct上的電壓,V;Soc,k為k時刻鋰電池的荷電狀態(tài);η為電池庫倫效應(yīng)系數(shù);Ts為系統(tǒng)采樣時間,s;電流Ib,k為k時刻的系統(tǒng)輸入,A;端電壓Ub,k為k時刻的系統(tǒng)輸出,V;開路電壓Uoc,k為SOC的函數(shù),V;a和b為可變參數(shù)。
2 鋰電池模型參數(shù)辨識
因鋰電池工作狀態(tài)受到環(huán)境溫度、放電深度、充放電電流倍率、容量衰減等因素的影響,其等效電路模型參數(shù)隨負(fù)載和外部環(huán)境的變化而變化。因此,為得到更可靠的模型,離線建模時需在多因素條件下對鋰電池進(jìn)行實驗研究,并建立參數(shù)數(shù)據(jù)表格或關(guān)系表達(dá)式;而在線建模時不需考慮多因素實驗,所辨識參數(shù)隨鋰電池實際工作情況的變化而變化[5,12]。
2.1 鋰電池可辨識模型
整理式(1),經(jīng)拉普拉斯變換,變?yōu)轭l域傳遞函數(shù),令U(s)=Ub(s)-Uoc(s),如式(3)所示。
(3)
式中τd、τct分別為濃差極化時間常數(shù)和活化極化時間常數(shù),τd=RdCd,τct=RctCct。
由鋰電池管理系統(tǒng)實際運行狀態(tài)可知,負(fù)載電流可被看作每個采樣時刻脈沖電流的線性組合[13]。因此,本文使用脈沖響應(yīng)不變法離散化式(3)所示系統(tǒng),此方法變換式如式(4)所示,離散化后系統(tǒng)傳遞函數(shù)和差分方程如式(5)所示。
(4)
(5)
式中a1~a5為待辨識參數(shù),經(jīng)以上變換即可推算出二階RC模型中各電路元件參數(shù)表達(dá)式。
令系統(tǒng)輸出yk=Uk,則式(5)變?yōu)榭杀孀R的ARX模型,如式(6)所示。
(6)
式中:hk為由鋰電池系統(tǒng)輸入輸出數(shù)據(jù)構(gòu)成的信息矢量;θ為待辨識系統(tǒng)的參數(shù)矢量[13,14]。
2.2 鋰電池模型參數(shù)辨識方法
最小二乘法通過最小化誤差平方和找到一組數(shù)據(jù)的最佳函數(shù)匹配,所辨識系統(tǒng)參數(shù)具有無偏性、一致性、收斂性、有效性等特點,但隨著數(shù)據(jù)量增大,會出現(xiàn)數(shù)據(jù)飽和的問題,對于時變系統(tǒng),將導(dǎo)致時變參數(shù)不能得到很好的跟蹤[13,14]。為此研究者們提出了遺忘因子法,但實際系統(tǒng)工作狀態(tài)并不是穩(wěn)定變化的,鋰電池工作狀態(tài)隨負(fù)載的變化而變化,如電動汽車儲能系統(tǒng)的輸出功率主要由路況決定,使用定常遺忘因子已不能滿足系統(tǒng)要求。
因此,本文采用變遺忘因子最小二乘法辨識鋰電池模型參數(shù),以更好地跟蹤系統(tǒng)動態(tài)工作狀態(tài),其算法遞推公式(VFFRLS)為
(7)
式中:ek為新息;λk為可變遺傳因子;遺忘步長l、參數(shù)R均可調(diào);Kk為增益矢量;Pk為協(xié)方差矩陣。
2.3 鋰電池模型參數(shù)辨識實驗
測試所用單體鋰電池是國內(nèi)某公司生產(chǎn)的磷酸鐵鋰動力電池,標(biāo)稱電壓為3.2 V,標(biāo)稱容量為20 Ah,標(biāo)準(zhǔn)充放電電流為0.5C,最大持續(xù)放電電流為2.0C。
為保證鋰電池建模準(zhǔn)確度,室溫25℃下,分別在不同放電電流倍率(0.5C、1.0C、2.0C、2.5C)和不同DOD下開展實驗研究。參考HPPC測試方法[6],先將被測鋰電池以恒定標(biāo)準(zhǔn)電流充電至截止電壓3.65 V,而后恒壓充電至截止電流0.6 A,然后以不同倍率電流放電至2 V停止,且采用間歇放電方式,恒流放電5 min、靜置10 min。以1.0C放電為例,詳細(xì)實驗波形如圖2a所示,圖中給出了充放電系統(tǒng)記錄的實時端電壓、電流和DOD等實驗數(shù)據(jù)。
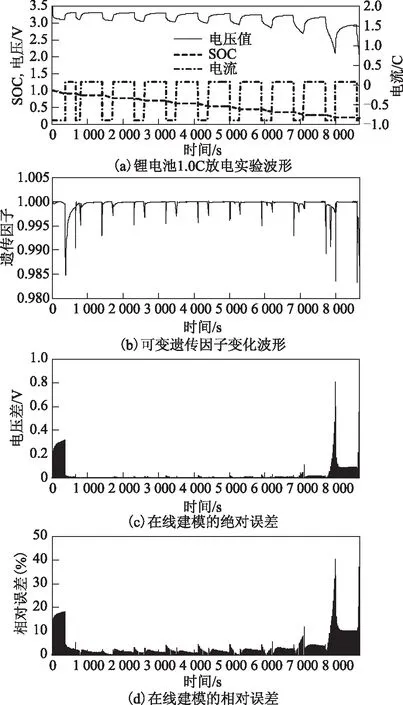
圖2 鋰電池1.0C放電實驗和在線建模波形Fig.2 Waveforms of lithium-ion battery 1.0C discharge current experiment and online modelingcircuit model
為驗證VFFRLS辨識方法的有效性,分別給出建模的絕對誤差、方均根誤差、相對誤差和平均相對誤差來描述所建立二階RC模型的性能。圖2b為整個辨識過程中遺傳因子變化的波形;圖2c 為模型預(yù)測端電壓與實驗值的絕對誤差,從圖中可看出,在線建模的初始階段,由于辨識算法還未達(dá)到穩(wěn)定值,所以誤差較大,算法收斂后誤差范圍可控制在0.1 V內(nèi),當(dāng)鋰電池放電電壓接近截止電壓時,絕對誤差有所增大,方均根誤差為0.173;在線建模的相對誤差如圖2d所示,整個辨識過程的平均相對誤差為3.77%。
表1給出了不同建模方法各二階RC模型的性能對比,列出了采用變遺忘因子最小二乘法進(jìn)行在線建模、離線建模與常用最小二乘法在線建模的模型方均根誤差,離線建模時所辨識參數(shù)根據(jù)最小二乘法準(zhǔn)則采用四次多項式擬合而成[15]。由表1可知,隨著放電電流的增大,模型誤差也相應(yīng)增加,說明負(fù)載變化越大對鋰電池建模性能的影響越大;對比常用最小二乘法(RLS)在線建模的模型誤差,引入可變遺傳因子能提高模型準(zhǔn)確度;由于離線辨識方法不存在算法未收斂的階段,且多項式曲線擬合可改善動態(tài)建模帶來的隨機干擾,因此模型性能有所提高。
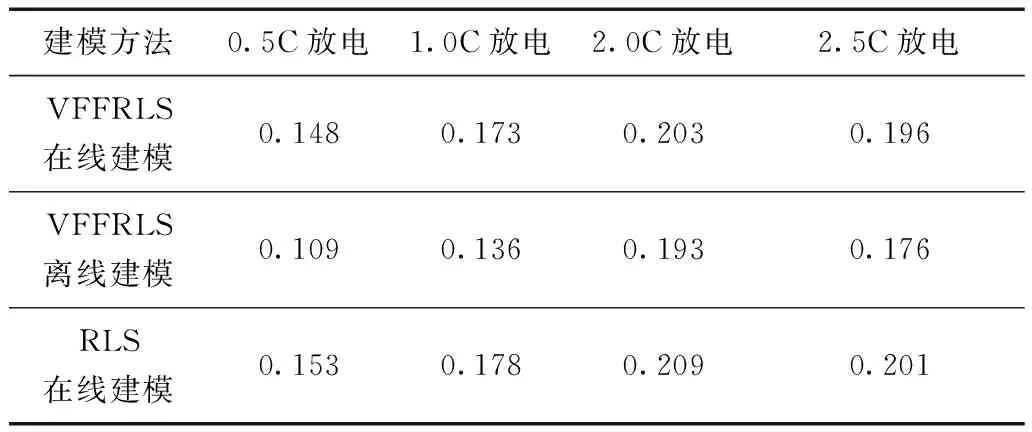
表1 不同建模方法性能對比(方均根誤差)Tab.1 Contrast of different ways modeling performance (RMSE)
2.4 鋰電池開路電壓辨識
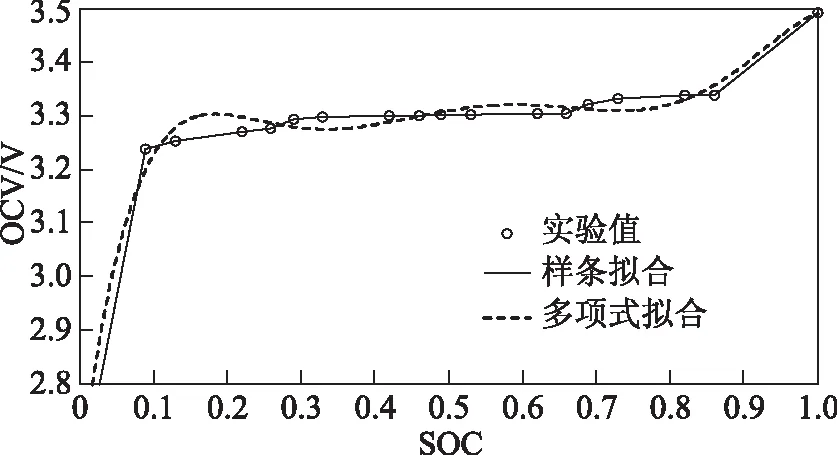
圖3 OCV-SOC曲線Fig.3 OCV-SOC curve
開路電壓(OCV)是鋰電池建模中必不可少的部分,且與SOC的關(guān)系比較穩(wěn)定。為得到可靠的OCV-SOC關(guān)系曲線,需在實驗中將鋰電池靜置1 h以上[12,13]。實驗中得到的OCV-SOC曲線數(shù)據(jù)如圖3所示,通常所采用的多項式擬合方法因高階多項式擬合會引起病態(tài)曲線,圖中虛線為六次多項式擬合而成,與磷酸鐵鋰電池較為平坦的開路電壓特性曲線不符,因此采用一次樣條函數(shù)分段擬合實驗數(shù)據(jù),得到可變參數(shù)a和b,如表2所示。

表2 OCV-SOC曲線參數(shù)表Tab.2 Parameter values of OCV-SOC curve
3 離散魯棒濾波基本理論
3.1 魯棒濾波
魯棒濾波技術(shù)主要包括H2濾波和H∞濾波。H2濾波通過尋求估計誤差的有界協(xié)方差使濾波盡可能穩(wěn)健,其性能指標(biāo)是濾波誤差方差最小,卡爾曼濾波算法即是建立在H2估計準(zhǔn)則基礎(chǔ)上的,它要求準(zhǔn)確的系統(tǒng)模型和確切已知外部干擾信號的統(tǒng)計特性,對系統(tǒng)中存在的噪聲不確定性較敏感,易造成濾波發(fā)散;而H∞濾波的研究對象是具有參數(shù)不確定性的系統(tǒng),目標(biāo)是使系統(tǒng)由噪聲輸入到估計誤差輸出的傳遞函數(shù)H∞范數(shù)極小化或小于一給定值,其性能指標(biāo)是使干擾到估計誤差能量增益最小,使濾波器對外界干擾不敏感[16,17]。
由前述分析可知,基于LPV模型的鋰電池系統(tǒng)存在參數(shù)攝動、測量誤差、低階非線性等不確定性噪聲,且因鋰電池管理系統(tǒng)為離散系統(tǒng),因而提出基于離散H∞濾波算法的魯棒估計法,期望獲得可靠的鋰電池SOC估計。
3.2 離散H∞濾波算法
狀態(tài)方程式(2)轉(zhuǎn)換為
(8)
式中:Ak為系統(tǒng)矩陣;Bk為輸入矩陣;Ck為觀測矩陣;Dk為前饋矩陣;uk、yk分別為系統(tǒng)的輸入、輸出;ωk、vk分別為系統(tǒng)噪聲和測量噪聲;zk為估計目標(biāo),是估計狀態(tài)的線性組合;Lk為自定義矩陣。
定義代價函數(shù)為
(9)

(10)
那么,H∞濾波的迭代算法為
(11)

4 鋰電池荷電狀態(tài)魯棒估計
4.1 鋰電池系統(tǒng)可觀測性分析
由式(8)可知,系統(tǒng)可觀測性矩陣如式(12)所示,從表2可看出a≠0,矩陣V為滿秩矩陣,系統(tǒng)可觀測。
(12)
4.2 鋰電池荷電狀態(tài)魯棒估計實驗驗證
實驗使用ADVISOR軟件中的UDDS工況測試鋰電池,將鋰電池SOC初值定為1,按照測試功率要求,進(jìn)行1次循環(huán)放電,放電時間為1 370 s,采樣頻率為1 Hz,實時記錄鋰電池電壓、電流和溫度等工作數(shù)據(jù)。
由3.2節(jié)中離散H∞濾波理論可知,將式(2)與式(8)相結(jié)合,采用式(9)所示的迭代公式進(jìn)行SOC估計,因此矩陣Lk需選定為[0,0,1],參數(shù)γ選取為大于1的實數(shù)且每個時刻需滿足式(10),從10開始,以10遞增直至滿足性能要求。當(dāng)選取Lk=I0、γ趨于無窮大時,H∞濾波算法將退變?yōu)榭柭鼮V波算法[15,16]。為提高SOC估計準(zhǔn)確度,鋰電池模型暫定為VFFRLS離線辨識的二階RC模型。
實驗對比分析波形如圖4所示,圖4a為UDDS工況波形圖,其測試電流的波形圖如圖4b所示;圖4c為SOC初始值為1時兩種SOC估計法的對比波形圖,圖4d為兩種方法的SOC估計誤差,從圖中可看出,EKF法的最大估計誤差約為4%,H∞濾波法的最大估計誤差約為3%;圖4e和圖4f分別為當(dāng)SOC初始值為0.9時,兩種方法的對比波形圖和SOC估計誤差,從圖中可看出,兩種算法收斂速度不同,都在1 min左右穩(wěn)定,但H∞濾波算法穩(wěn)定后,其估計準(zhǔn)確度仍高于EKF法。

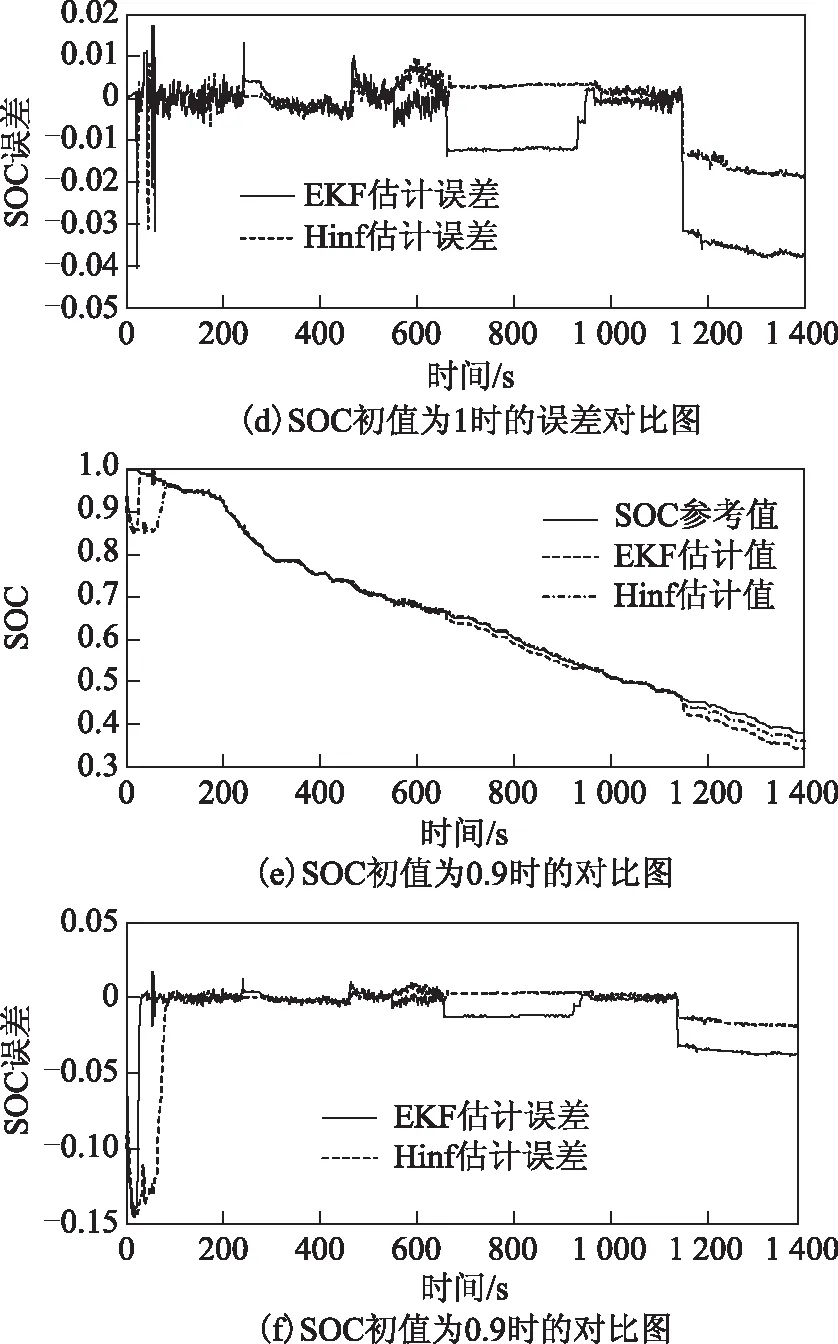
圖4 UDDS工況下SOC估計的對比波形Fig.4 SOC estimation comparative waveforms of UDDS test
表3為不同SOC初始值下兩種估計方法的對比性能,表中數(shù)據(jù)證明了兩種估計方法的有效性,降低了建模帶來的誤差,且SOC初始值為1時,H∞濾波法表現(xiàn)出較好的估計準(zhǔn)確度;當(dāng)SOC初始值為0.9時,雖然H∞濾波法較長收斂時間影響了整個實驗的估計誤差,但當(dāng)算法穩(wěn)定后仍保持了較好的跟蹤準(zhǔn)確度,具有較好的魯棒性。

表3 不同估計方法性能對比(方均根誤差)Tab.3 Contrast of different ways estimation performance (RMSE)
5 結(jié)論
本文基于二階RC電路,建立了鋰電池等效電路模型,采用變遺忘因子最小二乘法辨識了模型參數(shù),提出了基于離散H∞濾波的SOC魯棒估計方法,并開展了相關(guān)實驗和仿真研究,實驗結(jié)果表明:
1)鋰電池動態(tài)工作狀態(tài)受到外部環(huán)境和負(fù)載變化的影響,會影響鋰電池建模性能,采用變遺忘因子最小二乘法辨識模型參數(shù),可保證模型的可靠性和準(zhǔn)確度。
2)通過對比分析3種建模方法可知,離線建模更能保證模型準(zhǔn)確度,但若考慮多影響因素下建模,其過程耗時較長,而在線建模減少了大量鋰電池實驗研究,更有利于工程實現(xiàn)。
3)基于離散H∞濾波的SOC魯棒估計法能改善鋰電池系統(tǒng)中不確定性噪聲帶來的影響,與EKF法相比,具有較高的估計準(zhǔn)確度和較好的魯棒性。
[1] Rahimi-Eichi H,Ojha U,Baronti F,et al.Battery management system:an overview of its application in the smart grid and electric vehicles[J].IEEE Industrial Electronics Magazine,2013,7(2):4-16.
[2] Rezvanizaniani S M,Liu Z C,Chen Y,et al.Review and recent advances in battery health monitoring and prognostics technologies for electric vehicle (EV) safety and mobility[J].Journal of Power Sources,2014,256:110-124.
[3] Seaman A,Dao T S,Mcphee J.A survey of mathematics-based equivalent circuit and electrochemical battery models for hybrid and electric vehicle simulation[J].Journal of Power Sources,2014,256:410-423.
[4] Hu Y,Yurkovich S,Guezennec Y,et al.A technique for dynamic battery model identication in automotive applications using linear parameter varying structures[J].Control Engineering Practice,2009,17(10):1190-1201.
[5] Sun Fengchun,Xiong Rui,He Hongwen,et al.Model-based dynamic multi-parameter method for peak power estimation of lithium-ion batteries[J].Applied Energy,2012,96:378-386.
[6] Freedom CAR battery test manual,Revision 3[R].United States Idaho National Engineering and Environmental Laboratory,USA,2003:D1-D21.
[7] 林成濤,王軍平,陳全世.電動汽車SOC估計方法原理與應(yīng)用[J].電池,2004,34(5):376-378. Lin Chengtao,Wang Junping,Chen Quanshi.Methods for state of charge estimation of EV batteries and their application[J].Battery Bimonthly,2004,34(5):376-378.
[8] 雷肖,陳清泉,劉開培,等.電動車蓄電池荷電狀態(tài)估計的神經(jīng)網(wǎng)絡(luò)方法[J].電工技術(shù)學(xué)報,2007,22(8):155-160. Lei Xiao,Chen Qingquan,Liu Kaipei,et al.Battery state of charge estimation based on neural-network for electric vehicles[J].Transactions of China Electrotechnical Society,2007,22(8):155-160.
[9] Plett G L.Extended Kalmanltering for battery management systems of LiPB-based HEV battery packs part 2:modeling and identication[J].Journal of Power Sources,2004,134(2):262-276.
[10]許爽,孫冬,柳欽煌.一種鋰電池組無損均衡管理系統(tǒng)設(shè)計[J].電子器件,2014,37(4):799-802. Xu Shuang,Sun Dong,Liu Qinhuang.A novel scheme of non-dissipative equalization management system for lithium battery pack[J].Chinese Journal of Electron Devices,2014,37(4):799-802.
[11]高明煜,何志偉,徐杰.基于采樣點卡爾曼濾波的動力電池 SOC 估計[J].電工技術(shù)學(xué)報,2011,26(11):161-167. Gao Mingyu,He Zhiwei,Xu Jie.Sigma point Kalman filter based SOC estimation for power supply battery[J].Transactions of China Electrotechnical Society,2011,26(11):161-167.
[12]Hu X S,Li S B,Peng H.A comparative study of equivalent circuit models for Li-ion batteries[J].Journal of Power Sources,2012,198:359-367.
[13]Li Yong,Wang Lifang,Liao Chenglin,et al.Recursive modeling and online identification of lithium-ion batteries for electric vehicle applications[J].Science China Technological Sciences,2014,57(2):403-413.
[14]Yuan Shifei,Wu Hongjie,Yin Chengliang.State of charge estimation using the extended Kalman filter for battery management systems based on the ARX battery model[J].Energies,2013,6(1):444-470.
[15]孫冬,陳息坤.基于離散滑模觀測器的鋰電池荷電狀態(tài)估計[J].中國電機工程學(xué)報,2015,35(1):185-191.Sun Dong,Chen Xikun.Charge state estimation of Li-ion batteries based on discrete-time sliding mode observers[J].Proceedings of the CSEE,2015,35(1):185-191.
[16]Yan Jingyu,Xu Guoqing,Qian Huihuan,et al.Robust state of charge estimation for hybrid electric vehicles:framework and algorithms[J].Energies,2010,3(10):1654-1672.
[17]Simon D.Optimal State Estimation:Kalman,H∞,and Nonlinear Approaches[M].USA:John Wiley & Sons,2006:333-388.
Modelingand State of Charge Robust Estimation for Lithium-ion Batteries
ChenXikun1SunDong1,2ChenXiaohu1
(1.School of Mechatronics Engineering and Automation,Shanghai University Shanghai 200072 China 2.Zhengzhou University of Light Industry Zhengzhou 450002 China)
In lithium-ion battery power management system,the dynamic modeling and the estimation of state of charge (SOC) are the key techniques.The battery working states are affected by external environment factors and load changes.So the variable forgetting factorleast squares method is used to identify the model parameters based on the second-order RC equivalent circuit model.For the uncertainty noise problem in actual applications,the SOC robust estimation method is proposed based on the discrete-time H-infinity filter.The experiments are carried to compare the suggested method with the commonly used extended Kalman filter.The results show that the performance of the second-order RC model can be improved by the variable forgetting factor least squares method;the robust estimation method can be used to compute battery SOC accurately with 3% error,and the proposed algorithm has better robustness than the extended Kalman filter.
Lithium-ion battery,state of charge (SOC),discrete-time H-infinity filter,extended Kalman filter (EKF)
國家高技術(shù)研究發(fā)展(863)計劃(2011AA11A247)和上海市經(jīng)信委重大技術(shù)裝備項目(ZB-ZBYZ-02-14-0825)資助。
2014-12-29 改稿日期2015-03-28
U463
陳息坤 男,1962年生,博士,副教授,研究方向為大功率電力電子變換與控制技術(shù)、新型儲能及其變換控制技術(shù)、新能源發(fā)電技術(shù)等。
孫 冬 男,1979年生,博士研究生,講師,研究方向為電力電子與電力傳動。(通信作者)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
電源技術(shù)(2016年9期)2016-02-27 09:05:39