足履機器人的步行建模和運動仿真
2015-04-25 01:44:32杜微門玉啄陳光
機床與液壓 2015年9期
杜微,門玉啄,陳光
(長春工程學院,吉林長春130012)
0 前言
行進機構的運動穩定性、越障性和適應復雜地形能力是搜救機器人機械結構研究的關鍵技術。目前機器人的行進機構主要包括輪式、足式、履帶、輪子履帶復合式和仿生式[1-6]。針對現有行進機構的優缺點,設計了足履機器人,它兼具了足式和履帶的共同優點,在行進過程中可以互補其缺點。并利用ADAMS 建立了雙足履帶機器人簡化模型進行運動仿真。

圖1 足履機器人模型
1 足履機器人虛擬樣機模型的建立
1.1 機器人模型建立和行進方式
足履機器人簡化建模如圖1 所示。足履機器人采用內膝式結構,與人腿類似,一共兩條腿,每條腿由大腿和小腿組成。在足履機器人中,主要靠履帶來轉向,所以每條腿只建立了3 個自由度,髖關節,膝關節和踝關節的轉動。有兩種行進姿態,履帶式和足式,分別如圖2、圖3 所示。
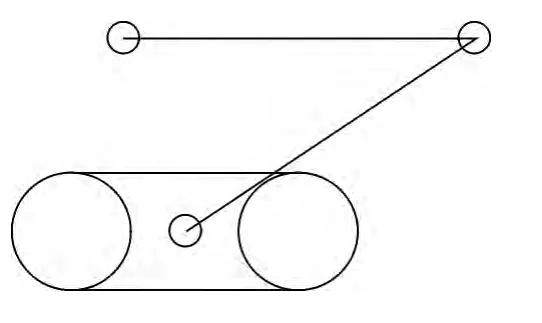
圖2 履帶式行進方式
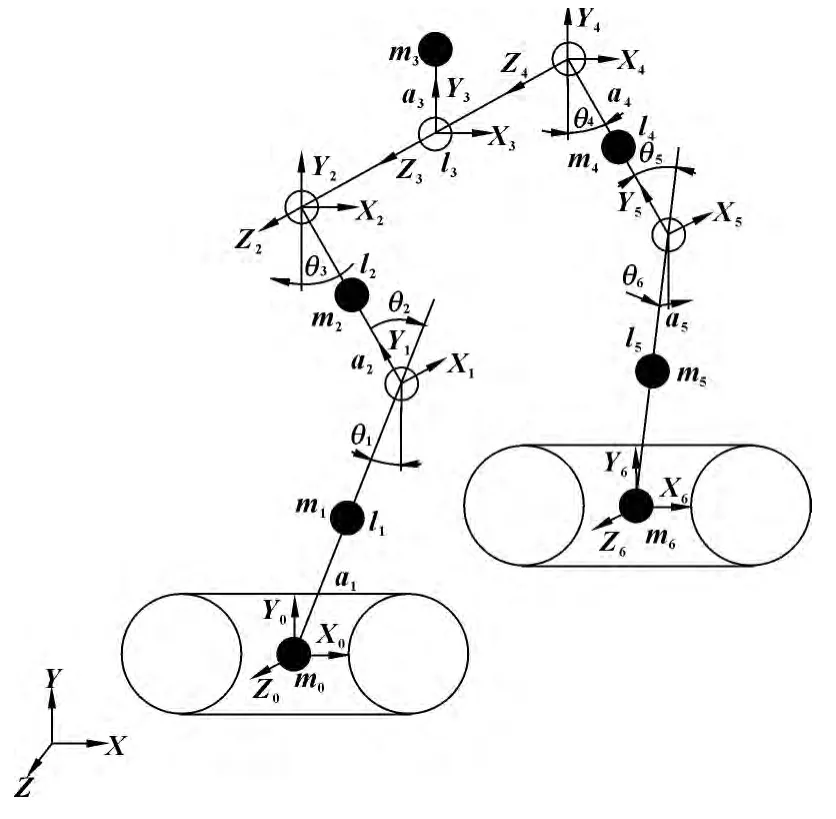
圖3 足式行進方式
1.2 機器人足式行走模式運動學模型建立
足式機器人在行走過程中是在支撐相和擺動相之間進行變換的。整個行進過程中運動是由關節的轉動來完成的。關節處的轉動獲得方式可以由轉動到轉動的驅動方式和直動到轉動的驅動方式兩種,無論哪一種都應該在獲得驅動函數后才能進行驅動。而且驅動函數應該滿足行進平穩,無明顯沖擊,足與地面之間無滑動和拖地現象發生[7]。
如圖3 所示,在足式運動中通過建立坐標系確定機器人各構件間的位姿關系。進而對足端進行步態規劃。其中m 為機器人總質量,mi為第i 個構件質量,X0~Xi,Y0~Yi,Z0~Zi為關節處坐標,xi為第i 個質心點在X0Y0Z0的X 軸坐標,yi為第i 個質心點在X0Y0Z0的Y 軸坐標。l1~l5為各個桿長,假設各桿長相等,θ0~θ6為各個關節的轉角,a1~a5為各個關節到質心的距離。
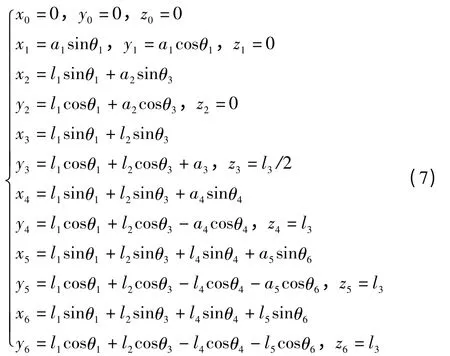
圖中XYZ 是世界坐標系用A 表示,X0Y0Z0為右腳履帶中心位置局部坐標系,用B 表示,則任意Bi表示為:

根據圖3,通過坐標變換求得各回轉關節處的坐標。以右腿為例求得膝關節和髖關節處坐標關節處坐標方程:
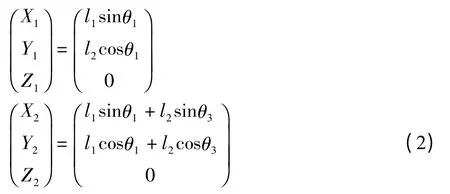
為了足端落地時沒有沖擊和波動,踝關節采用正弦加速度的運動方式,經過積分得到其位移的運動軌跡方程為[8]:
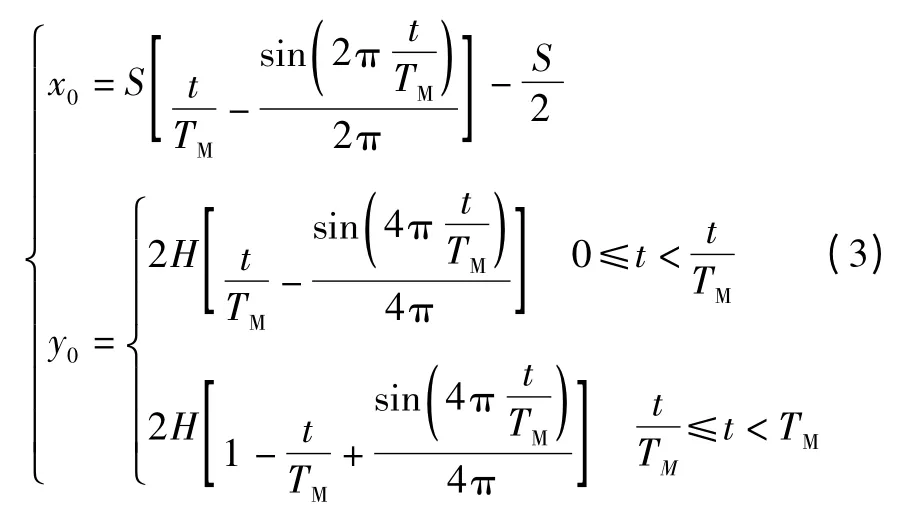
機器人由履帶結構代替了腳的結構,履帶上設計了彈簧緩震機構,所以假設機器人在起步、落地和行走時履帶始終與地面保持平行。機器人的身軀規劃為水平勻速運動,則右腿髖關節運動方程為:

根據圖3 和公式(2)、(3)、(4)得到右腿的關節轉角的約束方程為:
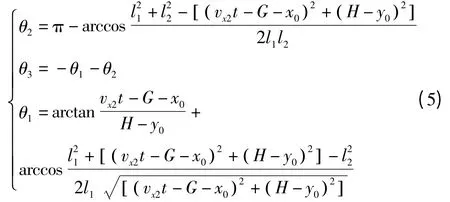
同理可以求出左腿的運動軌跡。
根據圖3 可求得的關節處轉角,并可計算出質心坐標方程:

式中:
2 足式運動模式的運動仿真
在ADAMS 中使用step 函數編程,保證兩個足端的運動行為滿足表1 要求。
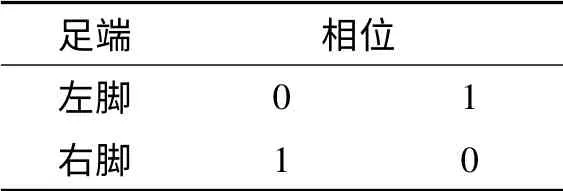
表1 兩個足端的運動行為
樣機的大小腿桿長均為90 mm,腳長80 mm,兩腿之間距離100 mm,步幅為100 mm,前兩步的抬腿高度為5.5 mm,后面的抬腿高度10 mm,運動周期為1 s,G 為25 mm。機器人的運動學仿真如圖4 所示:機器人的初始狀態為下蹲,然后左右腳交替行走,停止時回到雙腳下蹲狀態。
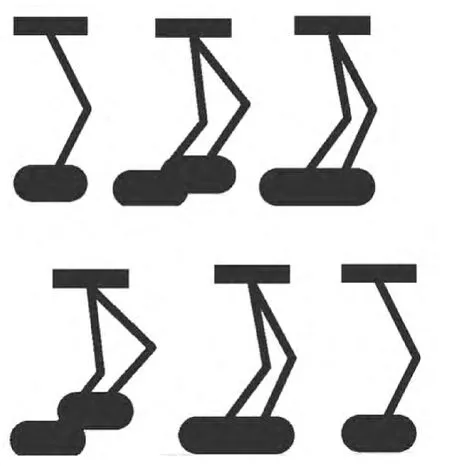
圖4 雙足機器人運動學仿真
機器人的足端和質心在Y 軸和Z 軸的運動軌跡如圖5 和圖6 所示。機器人左腿和右腿在Z 軸的運動軌跡如圖7 和圖8 所示。從圖6 的運動軌跡可以看出,質心運動曲線在較大步幅的情況下基本平滑,上下波動不大,抬腿高度越小,上下波動越小,運動越平穩。從曲線上可以看出在落腳的地方機器人稍有些波動。履帶式行進方式在跨越壕溝時,跨越的壕溝尺寸為腳長的,當采用腿式運行方式跨越壕溝時步長步幅,仿真的步長為100 mm,遠遠大于履帶行進方式跨越壕溝的壕溝的尺寸。進一步說明了足履聯合方式的優越性。
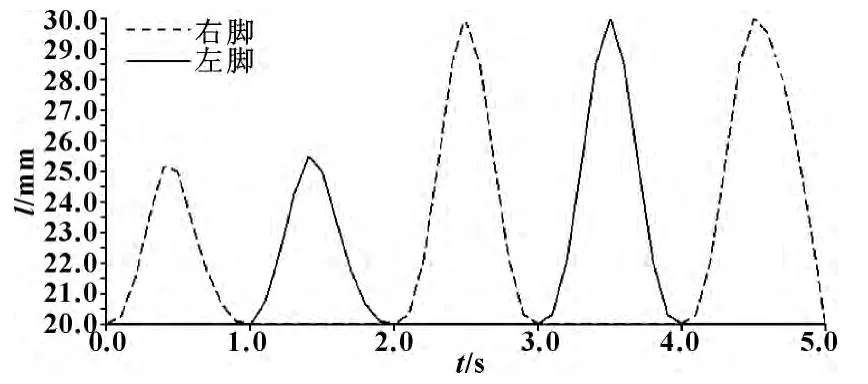
圖5 足端運動軌跡
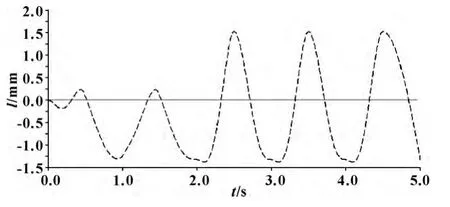
圖6 質心的運動軌跡曲線
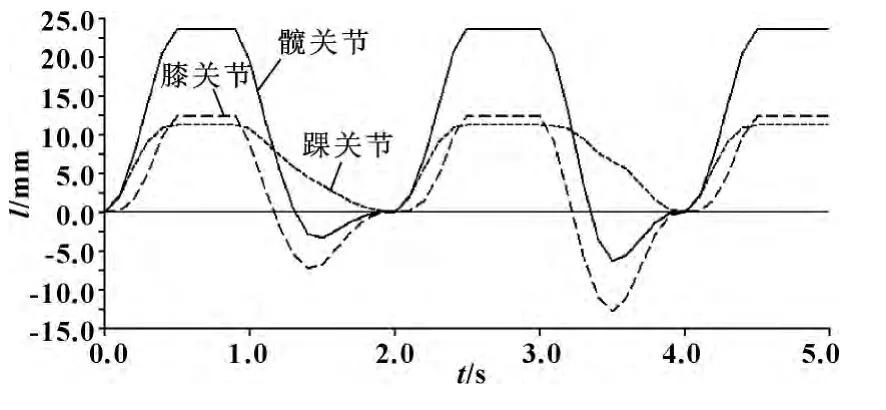
圖7 左腿髖關節、膝關節、踝關節運動軌跡
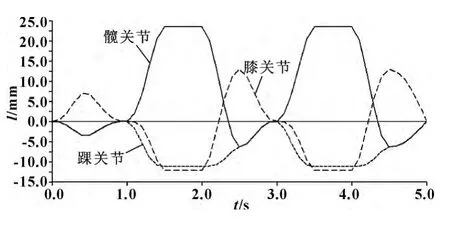
圖8 右腿髖關節、膝關節、踝關節運動軌跡
3 結論
結合履帶和腿式的共同特點,建立了足履機器人的行走模型,由于它兼具了足式和履帶的優點和缺點,所以可以在運動中進行互補,即可以根據不同的路面特征,采用不同的行進模式。文中主要建立了這種模式下足式行進的步態規劃,并使用ADAMS 進行仿真,驗證了所建立數學模型的可行性。為下一步的控制研究建立了基礎。
[1]CHESTNUTT J,LAU M,CHEUNG G,el al.Footstep Planning for the Honda ASMOHum suoid[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation,Barcelona,Spain,2005.
[2]EMDO G,NAKANISH J,MORINOTO J,et al.Experim Ental Studies of a Neural Oscillator for Biped Locomotion with QRIO[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation,Barcelona,Spain,2005.
[3]梶田秀司.仿人機器人[M].管貽生,譯.北京:清華大學出版社,2007.
[4]阮曉鋼,仇忠臣,關佳亮.雙足行走機器人發展現狀及展望[J].機械工程師,2007(2):17-19.
[5]NISHIWAKI K,KAGAMI S,KUNIYOSHI Y,et al.Toe Joints that Enhance Bipedaland Full body Motion of Humanoid Robots[C]//Proceedings of the 2002 IEEE International Conference on Robotics & Automation,Washington,DC,2002.
[6]LIM H,TAKANISHI A.Biped Walking Robots Created at Waseda University:WL and WABIAN Family[J].Philosophical Transactions of the Royal Society A,2007,365(1850):49-64.
[7]陳佳品,程君實,馮萍,等.四足機器人對角小跑步態的研究[J].上海交通大學學報,1997(6):20-25.
[8]王立鵬,王軍政,汪首坤,等.基于足端軌跡規劃算法的液壓四足機器人步態控制策略[J].機械工程學報,2013(1):39-44.
[9]王偉東,孔民秀,杜志江,等.移動手臂對機器人越障性能影響及運動規劃[J].機械工程學報,2009(8):6-10.
