基于聯合振動試驗系統的正弦加隨機振動研究
2015-05-16 05:37:58嚴魯濤楊志鵬王有杰
振動與沖擊 2015年2期
嚴魯濤,楊志鵬,王有杰
(北京強度環境研究所,北京 100076)
基于聯合振動試驗系統的正弦加隨機振動研究
嚴魯濤,楊志鵬,王有杰
(北京強度環境研究所,北京 100076)
提出聯合振動試驗系統,將液壓振動臺與電動臺有效結合,并實現較大量級的正弦加隨機振動。用液壓臺施加低頻正弦激勵,用電動臺施加寬頻隨機激勵,將正弦信號與隨機信號有效分離,并分別用功率譜及頻譜控制。設置彈性、阻尼單元,用以模擬臺面至工件的傳遞特性,通過調整彈簧剛度及阻尼大小,使臺面至工件及電動臺的傳遞特性一致,以保護電動臺。利用有限元軟件Nastran仿真控制效果,將剛度、阻尼合理匹配后,電動臺能較好跟蹤工件運動。通過功率譜均衡方法有效控制隨機振動試驗,并在電動臺輸出端獲得與目標譜較一致的功率譜。工件呈現出要求的正弦加隨機振動,從而證明該系統的有效性。
聯合振動;振動試驗;正弦加隨機;有限元分析;振動控制
振動試驗為應用較廣的產品測試技術,旨在考核產品經受振動激勵能力及在振動激勵下保持性能的能力,研究、檢驗振動條件下產品結構及操縱可靠性[1]。振動臺為振動試驗系統中的執行機構,有機械振動臺、電動振動臺、液壓振動臺等多種類型。其中電動振動臺及液壓振動臺使用最廣[2]。電動式振動臺頻率范圍寬,但推力較小,主要用于高頻及波形失真要求較高的試驗領域。而電液振動臺雖推力大,但存在高頻性能差、上限工作頻率低、波形失真大等缺點。
現有振動試驗系統一般使用同種類型振動設備,往往只能實現設備允許的振動量級,大型全尺寸試件的低頻大振幅振動試驗常通過液壓振動臺實現,而寬頻小振幅振動多通過電動臺實現。
自然界中,正弦加隨機振動或窄帶加隨機的混合振動環境較常見,如道路軌道車輛發動機與路面噪聲,工程機械、航空航海的船舶螺旋槳沖擊及海浪沖擊等;軍用設備如螺旋槳飛機、直升飛機、噴氣機、火炮發射等。因結構損傷及疲勞破壞由隨機與正弦振動共同作用的結果,其混合模式振動試驗更能真實模擬或再現樣品經歷的真實條件[3-4]。現有文獻多用正弦加隨機振動試驗方法對應不同試件的具體試驗過程、試驗夾具設計以及集中控制方法研究,以期獲得更高的控制精度及運算速度[5-6]。
然而,因電動臺位移幅值限制,對低頻段量級較高的正弦加隨機振動現有試驗系統無法實現,故利用單一類型振動臺模式存在限制。本文提出一種聯合振動試驗裝置,將低、高頻振動設備有效結合,綜合設備優勢,擴展振動試驗系統使用范圍。并利用有限元仿真驗證該系統對大量級正弦加隨機振動的適用性。
1 試驗系統及動力學模型
聯合振動試驗系統見圖1,試件整體為低頻或窄帶振動,而高頻段部分為隨機振動背景上疊加正弦或窄帶隨機振動試驗的混合模式。電液振動臺系統由液壓油源、伺服閥、液壓作動器及擴展臺組成,提供低頻大推力振動。指令信號發送至伺服閥,通過改變閥芯位置或轉角改變通入缸內上下腔流量,從而改變活塞桿位置。可以看出,由于電動臺位移一般較小,為保護電動臺,需使擴展臺至試件低頻段及電動臺輸出桿的傳遞特性一致。即在擴展臺激勵下試件與電動臺同步運動。為此,設置含可變剛度彈簧、阻尼器的傳遞環節。
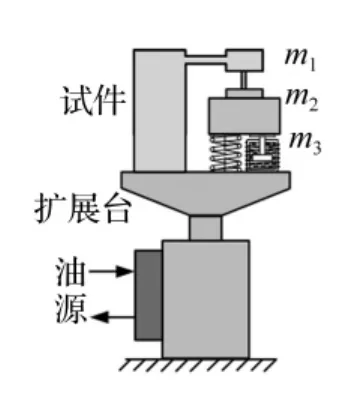
圖1 試驗系統Fig.1 Vibration test system
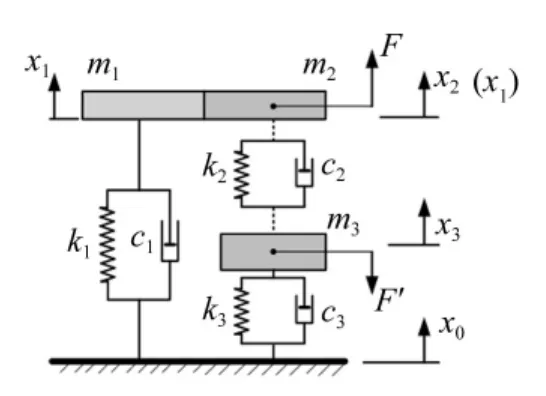
圖2 動力學模型Fig.2 Dynamics model
建立系統的動力學模型見圖2。電液振動臺激勵經擴展臺、試件主體傳遞至元部件(見圖2左半部),而高頻激振器及可變剛度彈簧、阻尼器可簡化為圖2右半部。圖中,m1為試件元部件質量;m2為電動臺運動部分質量;m3為電動臺靜止部分質量;k1,c1分別為擴展臺至試件元部件的傳遞剛度及阻尼;k2,c2分別為電動臺靜止部分至運動部分的傳遞剛度及阻尼;k3,c3分別為擴展臺至電動臺的傳遞剛度及阻尼;x0為擴展臺激勵; x1,x2,x3分別為m1,m2,m3的運動;F及F'為m2及m3的相互作用力。試驗進時m1與m2固定連接,需設計系統參數使x1=x2,進行傳遞特性推導。
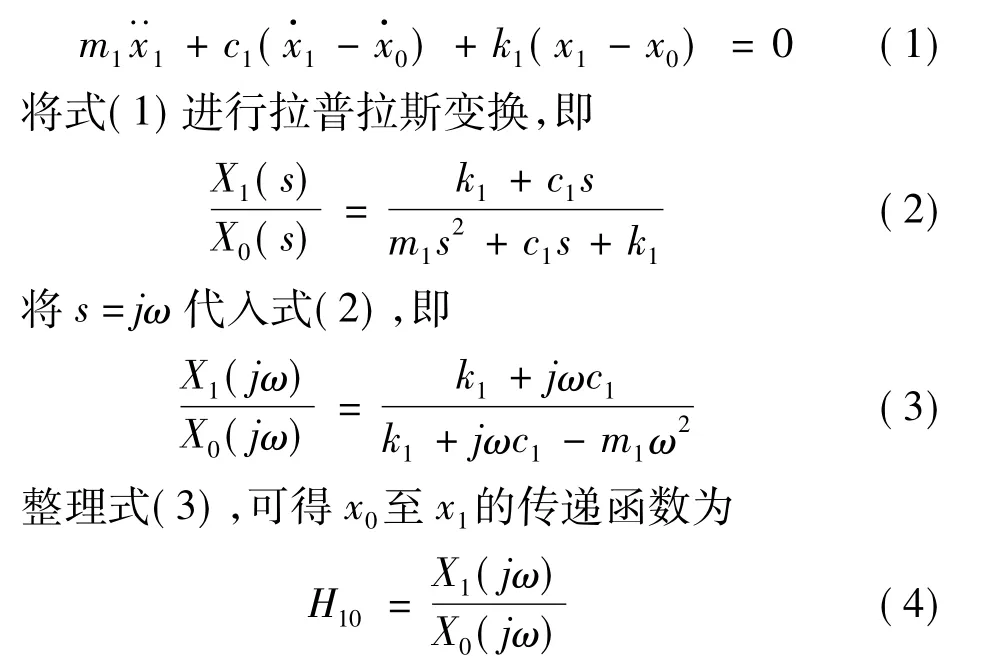
液壓振動臺擴展臺面激勵x0至x1的傳遞關系可由m1的運動方程獲得,即
電動臺運動與靜止部件間基于載流導體在磁場中受電磁力作用,該電磁力與導體中電流、導體在磁場中的有效長度及導體所處磁場的磁感應強度有關。電動臺固有頻率一般較高,在低頻段可認為剛性傳遞,因電磁力F數值較小,在本文動力學模型中液壓臺驅動為主要分析對象,忽略F影響。在x0激勵下分別對m2,m3建立運動方程為

解方程組,消去x3,得x2與x0的傳遞關系為


2 試驗控制方法及參數匹配
2.1 試驗控制方法
正弦加隨機振動控制過程見圖3。液壓臺輸出激勵后測試m1,m2響應,并計算傳遞特性,進而匹配彈性/阻尼單元。將試驗譜型分離成正弦及隨機振動譜型,生成正弦及隨機信號分別發送至液壓臺、電動臺;采集響應信號后將信號分離,并對正弦、隨機響應信號進行幅值及功率譜密度估計;對于正弦信號幅值均衡,對隨機信號做功率譜密度均衡,重新生成信號并進入循環。其中,高低頻信號頻譜分離可據傅里葉變換的線性性質實現,而正弦信號分離用復數二差法、基于最小二乘的幅值相位分離法、基于多分辨率譜分析的信號分離法等[5-7]。
2.2 參數匹配及驗證
在擴展臺激勵下需使m1,m2響應一致(相近),否則會引起電動臺系統位移超限。對正弦加隨機或窄帶加隨機振動試驗,結合上述系統,m2,m1未連接時,液壓臺發送低量級信號,采集響應信號,獲得傳遞特性。將電動臺視為剛體,據電動臺質量匹配剛度、阻尼,使液壓臺至m1,m2的傳遞特性一致。
設m1=20 kg,m2=20 kg,m3=40 kg,c1=c2=5,k1=2E4,電動臺試驗頻率至2 000 Hz,電動臺剛度k2及彈性阻尼單元匹配計算式為

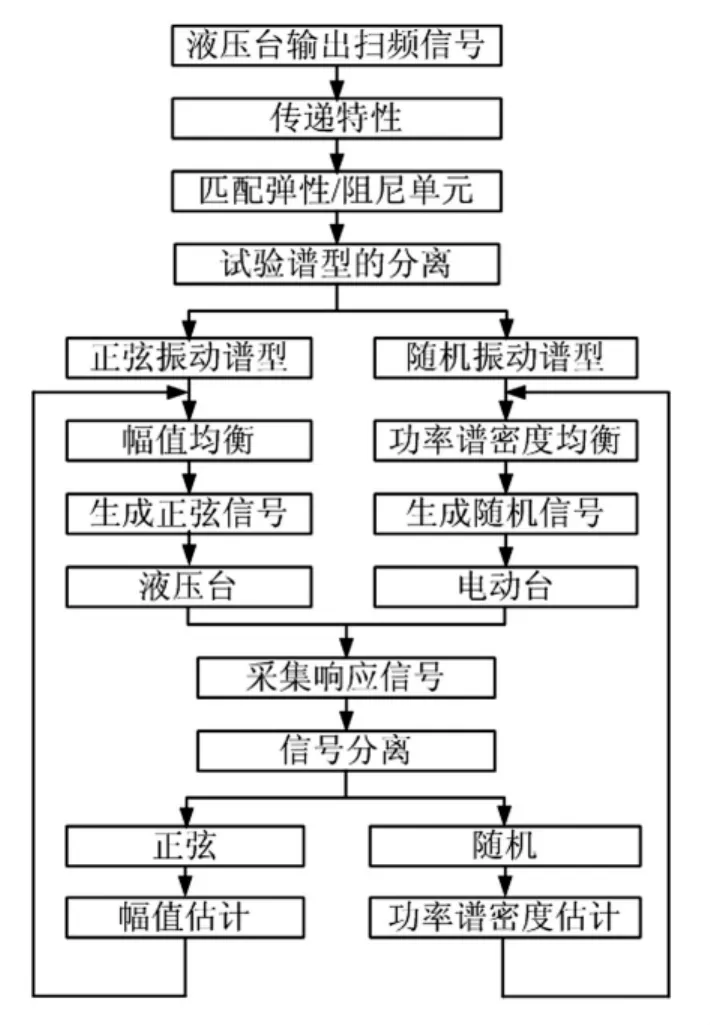
圖3 控制流程Fig.3 Control process
系統傳遞特性見圖4。由圖4看出,在5 Hz處出現的峰值為m1及k1構成的動力學系統固有頻率。液壓臺的使用頻率一般較低,故僅關注0~200 Hz低頻段。基礎對m1及m2的傳遞特性一致,且不存在相位差。電動臺的靜止質量與運動質量及彈性單元構成二自由度系統,因此在2 450 Hz處出現另一峰值。
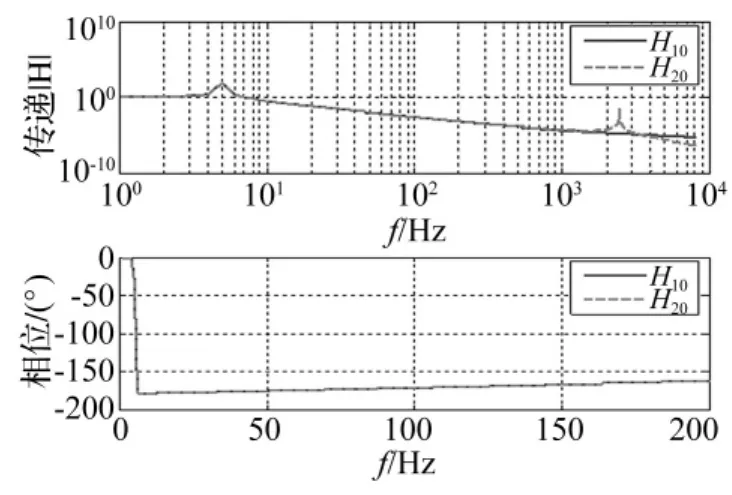
圖4 系統傳遞特性Fig.4 Transfer properties of the system by the
設液壓臺輸入頻率為5 Hz、幅值為2 g的正弦信號,電動臺輸入隨機噪聲信號,m1,m2響應見圖5。由圖5看出,未加入隨機時m1,m2響應相同,因激勵頻率與系統固有頻率相等時產生共振,致響應放大,故幅值較高。
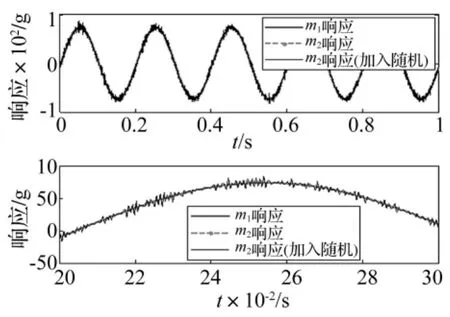
圖5 m1,m2響應Fig.5 Dynamic responses of m1and m2
3 仿真分析
3.1 目標譜值及驅動信號生成
目標譜值頻率范圍1~2 000 Hz,底譜密度為0.02 g2/Hz,在頻率5 Hz、20 Hz、45 Hz處為正弦振動,加速度幅值分別為15 g、9 g、3 g,對應位移幅值分別為149.1 mm、5.6 mm、0.4 mm。對低頻段,現有電動臺位移幅值無法滿足;對底譜段,因頻帶較寬,液壓臺無法實現,故該譜型需液壓臺與電動臺聯合實現。液壓臺需驅動擴展臺面、整體試件、彈性阻尼單元、電動臺等,而電動臺僅需驅動部分試件。
驅動信號含隨機信號及正弦信號兩部分。其中,隨機信號的生成,據底譜值計算頻譜值,進行對稱變換,加入隨機相位,通過IFFT變換獲得偽隨機信號;再經時域隨機化,即延遲、倒序、加窗、搭接等過程獲得真隨機信號[8]。正弦信號據幅值及頻率較易獲得,初相位值取零。
3.2 有限元模型
有限元模型見圖6,試件m1用懸臂梁(Φ60 mm,長0.5 m)表示,其阻尼特性可由幾何參數及軟件設置定義。懸臂梁材料為鋼,彈性模量2×1011Pa,泊松比0.3,密度7 800 kg/m3。電動臺運動部件質量m2及靜止部件質量m3均由集中質量(m2=100 kg,m3=150 kg)單元定義,彈簧k2及k3均由線性彈簧單元表示(k2=1.6×1010,k3=8.4×106)。與臺面相連的兩節點(節點1、2)輸入相同信號以表示相同的臺面激勵,m2及m3設置大小相同方向相反激勵以表示電動臺靜止及運動部件的相對作用。
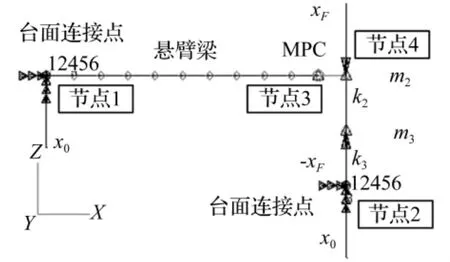
圖6 有限元模型Fig.6 Finite element analysis model
3.3 正弦信號控制
為獲得臺面至m1的傳遞特性,用掃頻信號進行辨識,仿真結果見圖7。掃頻信號參數為:掃頻速率20 Hz/s,初始相位0,初始頻率0.1 Hz,采樣頻率2 000 Hz。對應圖6有限元模型,懸臂梁遠端節點3、4未建立MPC關系,掃頻信號輸入節點1,對應輸出信號為節點3的響應。明顯看出,在頻率點29.2 Hz處出現峰值,為懸臂梁一階固有頻率。
據傳遞特性可確定對應不同頻率的放大倍數,5 Hz、20 Hz及45 Hz的放大倍數分別為2.107、4.837及3.246。據放大倍數計算壓縮因子,獲得均衡信號。將均衡信號輸入節點1,節點3可得所求正弦信號,見圖8。由圖8看出,目標信號與輸出信號值一致性較高,三個頻率對應幅值誤差分別為1.2%(-38 dB)、1.5% (-36 dB)、1.5%(-36 dB)

圖7 掃頻信號所得系統傳遞特性Fig.7 Transfer properties by the sweep sine signals

圖8 正弦振動控制Fig.8 Sine vibration control

圖9 響應一致性檢驗Fig.9 Consistency validation of the dynamic response
3.4 響應一致性分析
為避免因響應差值過大損壞電動臺,在相同臺面激勵下,需使節點3、4響應一致。分析知需匹配合適的彈簧剛度及阻尼。按懸臂梁一階固有頻率及懸臂梁質量可計算對應剛度。因帶寬直接決定共振峰陡峭程度,且帶寬與阻尼成正比,可用“半功率法”求解阻尼[9]。本例中阻尼大小在軟件中設置。液壓臺面至m2的傳遞環節中剛度由電動臺剛度k2及設置彈簧剛度k3兩部分構成。電動臺剛度k2由電動臺系統本身決定,為定值,故僅調整k3大小即可達到匹配精度(式(8) ~式(10))。
據正弦控制結果,對應圖6中節點1、2輸入相同正弦激勵,仿真結果見圖9。由圖9看出,懸臂梁節點3響應與激振器m2響應一致性良好,說明匹配的剛度、阻尼能解決液壓臺面至電動臺運動部分及懸臂梁遠端的傳遞特性不一致問題。不僅能保證電動臺運動部分與懸臂梁遠端的隨動性,亦為電動臺實現寬頻隨機振動環境模擬提供條件。
3.5 隨機振動控制
電動臺激振頻率范圍較寬,可實現從幾赫茲到上千赫茲激振,本例的隨機振動環境由電動臺模擬。控制過程通常為閉環功率譜均衡控制方式,據響應譜與參考譜間比較,獲取對驅動譜的修正信息,采用差分法實現對驅動譜補償,對所得新驅動譜提取其頻譜信息,據系統控制要求添加相位,進行快速傅里葉逆變換產生時域驅動信號[2]。
對應圖2、圖6中m2,m3,k2,k3構成的二自由度系統,節點4的隨機振動控制結果見圖10。與圖4系統特性H20趨勢一致,反饋信號出現兩個峰值,體現出二自由度系統的固有特性。因不存在噪聲及系統非線性影響,功率譜密度經一次均衡后即達到控制精度。
3.6 聯合振動模式
由于節點3、4采用MPC關聯,在節點4輸入隨機信號后對系統控制具有一定影響。因此在系統連接后需采用正弦及隨機信號分別控制。也有方法將正弦信號與隨機信號疊加計算功率譜,但數字信號頻域表示為離散,無法獲得相鄰離散點處頻率幅值;而功率譜多在對數分布頻域定義,傅里葉變換在頻率為線性分布,正弦加隨機信號功率譜值無法精確估計。另有通過增加譜線數、多分辨率等方法提高估計精度,但同樣帶來控制回路時間及運算量增加的問題[10]。
較實用的正弦加隨機振動控制算法為分離正弦及隨機信號并分別控制,將控制信號疊加。本系統中正弦、隨機信號均衡后分別輸送至液壓臺及電動臺,不存在信號疊加及相互耦合問題,可避免正弦加隨機信號譜估計精度差問題。經計算,響應信號及其頻譜見圖11,分離后的正弦、隨機信號見圖12。由于本系統對正弦及隨機分別激勵及控制,二者不存在離散點功率譜估計引起的誤差。由二圖看出,實際信號頻譜及目標頻譜非常接近,說明本方法可行。
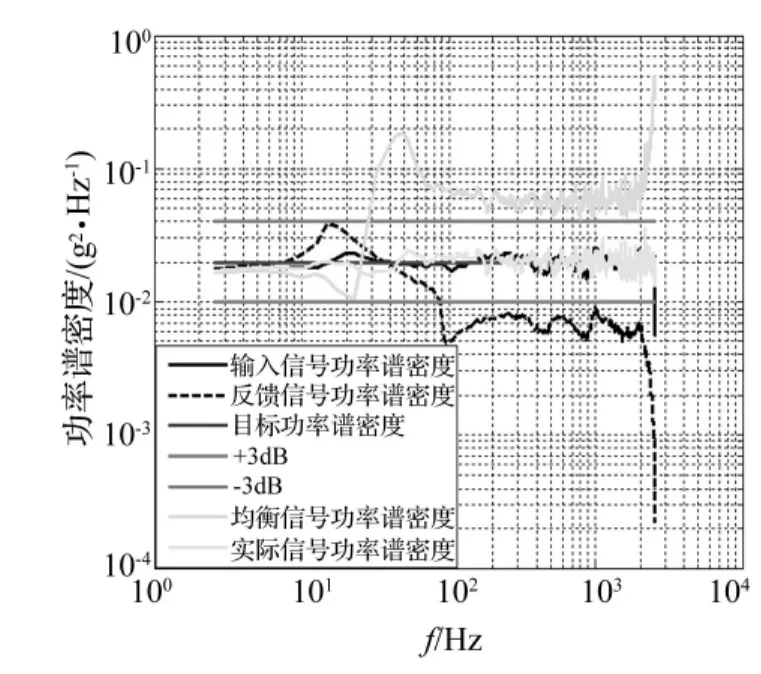
圖10 隨機振動控制Fig.10 Random vibration control results
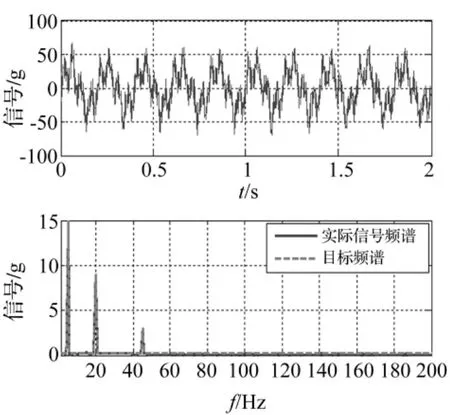
圖11 響應信號及頻譜Fig.11 Frequency spectrum of the response signals

圖12 信號分離Fig.12 Signals separation
4 結論
(1)提出一種聯合振動試驗裝置,將液壓振動臺與電動振動臺有效結合,并用于正弦加隨機振動試驗。
(2)系統中設置的可變阻尼及彈簧單元,可高精度模擬臺面致電動臺的傳遞特性,使電動臺及試件運動一致,為電動臺施加激勵提供條件。
(3)將正弦加隨機信號有效分離,并分別利用頻譜均衡及功率譜密度均衡方式控制,達到試驗要求精度。
(4)基于本系統良好的操作性,使液壓臺提供正弦振動,電動臺產生的寬頻隨機振動可提高正弦加隨機的試驗量級。
[1]陳章位,陳家焱,賀惠農.振動試驗低頻控制精度的研究[J].振動與沖擊,2010,29(8):31-34.
CHEN Zhang-wei,CHEN Jia-yan,HE Hui-nong.Research on control accuracy at low frequency in vibration test[J]. Journal of Vibration and Shock,2010,29(8):31-34.
[2]陳章位,于慧君.振動控制技術現狀與進展[J].振動與沖擊,2009,28(3):73-77.
CHENZhang-wei,YUHui-jun.Existingstateand development of vibration control technology[J].Journal of Vibration and Shock,2009,28(3):73-77.
[3]王述成.振動試驗實時控制系統的研究[D].杭州:浙江大學,2006.
[4]盧兆明,周驊,李仰鈔.混合振動試驗在汽車電子裝備中的應用和要點[J].環境技術,2009,27(2):35-41.
LU Zhao-ming,ZHOU Hua,LI Yang-chao.Mixed mode vibration test applied to electrical and electronic equipment of road vehicles[J].Environmental Technology,2009,27(2): 35-41.
[5]Stefanello M,Eng M,Carati E G.Environment for random and sinusoidalvibrationtestcontrolofaninverter-fed electrodynamic shaker[C].IEEE,2003:1093-1098.
[6]袁宏杰,李傳日.正弦加隨機振動控制技術的研究[J].航空學報,2000,21(4):383-384.
YUAN Hong-jie,LI Chuan-ri.Study of the sine-on-random vibration control[J].ACTA Aeronauticaet Astronautica Sinica,2000,21(4):383-384.
[7]陳后金,胡健,薛健.信號與系統[M].北京:清華大學出版社,2003.
[8]胡志強,法慶衍,洪寶林,等.隨機振動試驗應用技術[M].北京:中國計量出版社,1996:131-135.
[9]顧海明,周勇軍.機械振動理論與應用[M].南京:東南大學出版社,2007.
[10]王述成,陳章位.基于多分辨率譜分析的正弦加隨機振動試驗控制算法的研究[J].中國機械工程,2005,16(15):1335-1338.
WANG Shu-cheng,CHEN Zhang-wei.A new algorithm for sine on random vibration test based on multirate spectrum estimation[J].ChinaMechanicalEngineering,2005,16(15):1335-1338.
Sine on random vibration based on combined vibration test system
YAN Lu-tao,YANG Zhi-peng,WANG You-jie
(Beijing Institute of Structure and Environment Engineering,Beijing 100076,China)
In order to increase the range of vibration frequencies,a novel combination of the hydraulic vibration table and the electrodynamic shaker was proposed.The joint test system has been used in sine on random vibration test. The sine signals and random signals were provided by the hydraulic and electrodynamic shaker respectively,and the control algorithms based on spectrum equalization and power spectral density(PSD)equalization were utilized.The variable spring-damping elements were set to simulate the transfer properties from the table to the electrodynamic shaker. Based on the simulation results by the MSC(Nastran)software,it is indicated that the dynamic characteristics of electrodynamic vibration shaker is closely related to the low frequency part of test article.In accordance with the random and sine signals,the control algorithms can continuously update the drive signals,and the control accuracy of the reproduced PSD at the control point is quite satisfactory.
combined vibration;vibration test;sine on random signal;finite element analysis;vibration control
TB535;O324
A
10.13465/j.cnki.jvs.2015.02.016
2013-09-23修改稿收到日期:2014-01-09
嚴魯濤男,博士,工程師,1984年2月生
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
