基于趨勢項誤差控制的頻域積分算法研究與應用
2015-05-16 05:39:02胡玉梅周英杰朱浩陳先亮孫吉明皮陽軍
振動與沖擊 2015年2期
關鍵詞:信號
胡玉梅,周英杰,朱浩,陳先亮,孫吉明,皮陽軍
(重慶大學機械傳動國家重點實驗室,重慶 400044)
基于趨勢項誤差控制的頻域積分算法研究與應用
胡玉梅,周英杰,朱浩,陳先亮,孫吉明,皮陽軍
(重慶大學機械傳動國家重點實驗室,重慶 400044)
針對工程測試中利用振動加速度積分獲得位移時出現嚴重趨勢項誤差問題,采用低頻衰減算法對加速度信號在頻率內直接積分,并利用積分精度控制方程保證積分精度。通過與積分算法比較及驗證,證明該算法對積分誤差控制具有一定優勢。搭建含限位沖擊的振動測試實驗臺,研究該算法在工程測試中應用特性。實驗研究表明,該算法可有效控制趨勢項誤差,且隨待積分加速度基頻提高積分所得位移信號與真實位移信號吻合度提升。基于所用測試系統,加速度信號基頻超過3.8 Hz時積分幅值誤差小于10%,滿足工程測試需要;加速度基頻大于4.35 Hz時積分峰值誤差小于5%,可獲得較好測試效果。
加速度積分;位移;頻域積分;誤差控制
通過對結構加速度測試并兩次積分獲取位移方法在工程中有廣泛的應用需求,但對加速度積分時會出現趨勢項誤差干擾,導致積分位移曲線嚴重偏執,無法滿足工程需求。因此對加速度積分過程中趨勢項誤差控制成為研究熱點。
文獻[1]提出通過積分前后對信號進行高通濾波方法控制積分趨勢項誤差,但當信號主要成分頻率較低時濾除不充分,且易造成各頻率成分相位失真[2]。文獻[2-3]提出對加速度信號進行傅里葉變換,幅值譜內低頻幅值置零,在頻域內兩次積分,再通過逆傅里葉變換獲得位移信號,但低頻截止頻率選擇主觀性強,且會導致信號截止頻率下信息完全丟失[4]。文獻[5]提出通過對積分所得位移信號進行多項式擬合,將擬合的多項式減去以去除趨勢項方法。該方法雖可有效抑制初速度、初位移產生的趨勢項誤差,但難以控制測試誤差對積分影響,工程應用效果差[2]。文獻[6-7]通過建立趨勢項控制方程,求解反問題獲得系統特性,推導出加速度輸入與位移輸出的頻率響應函數,進而提出新型積分濾波器。該算法綜合考慮在有效控制積分誤差同時盡量避免低頻信息丟失,適用范圍廣。
以上算法多通過舍棄加速度低頻信息控制積分誤差。雖能兼顧積分誤差控制與低頻信號保留,但新型濾波器計算過程較復雜,目標頻率較低時濾波器過渡帶變短,會在頻域出現振蕩[6]。
本文基于文獻[6-7]研究,采用低頻衰減算法對加速度信號直接在頻率內積分,并利用積分精度控制方程保證積分精度,省去濾波器設計計算環節,簡化積分過程,避免濾波器頻域振蕩;通過與積分算法比較及實驗驗證,證明該算法對積分誤差控制具有一定優勢。通過實驗測試對該算法的工程應用特點進行總結。本文結果對后續研究及工程應用均有一定參考價值。
1 積分誤差控制頻域算法研究
1.1 控制方程及求解
工程測試所得加速度信號中含測試誤差,測試加速度與實際加速度、位移關系[1]為



式中:β為正則化系數;~a為測試加速度。
式(3)第一項為正則化方程,用于控制趨勢項誤差;第二項用于控制積分對~a的忠實程度。通過對該式雙目標優化的推導、求解,求出積分過程加速度輸入~a與位移輸出~u的頻率響應函數[6]為
1.2 積分精度控制
本文針對待積分加速度信號不同基頻引入目標頻率fT,對式(4)、(5)進行相對化處理,得HB()表達式[5]為

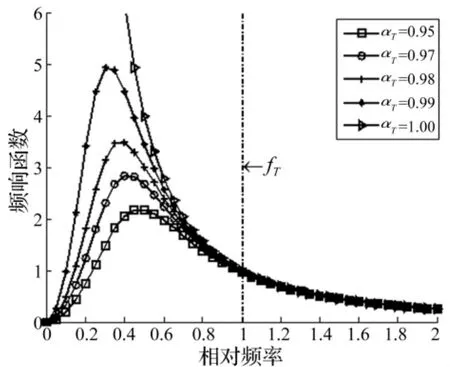
圖1 ~a與~u幅頻特性曲線Fig.1 Amplitude-frequency characteristic of~a and~u
1.3 頻域積分算法實現
由圖1、圖2積分過程幅頻特性看出:
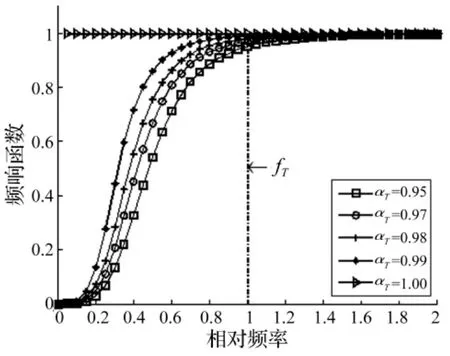
圖2 ~a與幅頻特性曲線Fig.2 Amplitude-frequency characteristic of~a and
(1)該算法在頻域內通過衰減輸入加速度信號中低頻信息達到控制趨勢項誤差目的。相比傳統積分算法[1-3,5]該算法可有效保留信號fT附近信息,對遠離fT的超低頻信息進行大幅度衰減,達到既充分考慮趨勢項誤差控制,又兼顧有效信息保留目的。
(2)當積分精度αT取1時,該算法幅頻特性與直接頻域積分[2]算法一致,無趨勢項誤差控制效果。而αT取值較高時(αT=0.99)對低頻成分(~f<0.2)抑制明顯,趨勢項誤差控制效果較好。
(3)隨積分精度αT取值降低對低頻信息衰減程度增大,對積分趨勢項誤差抑制加劇;但亦會加劇輸入信號幅值衰減。
因此該算法中,αT選擇需據信號中低頻噪聲程度及在控制趨勢項誤差基礎上盡量選較大值(推薦0.92 ~0.99),以便使信號中有效信息充分保留。
通過對推導過程總結,獲得基于趨勢項控制的頻域積分算法流程圖見圖3。

圖3 頻域積分算法流程圖Fig.3 The flowchart of integration algorithm in frequency domain
2 頻域積分算法驗證
為驗證圖3積分算法效果,本文利用含限位沖擊振動實驗裝置獲得位移-時間信號及加速度信號,分別用圖3及位移積分方法[1-3,5]對該加速度積分,將所得各自對應的位移-時間曲線與實驗所得位移-時間信號進行對比。由于沖擊瞬間信號較復雜,利用含限位沖擊振動實驗對評價積分算法有效性更有意義。
2.1 實驗臺簡介
含限位沖擊的振動測試實驗臺見圖4。該實驗臺通過電機驅動曲軸,由曲柄連桿機構將曲軸轉動轉化為活塞往復直線運動,活塞通過彈簧連接往復運動桿;往復運動桿中部有環狀凸起,與兩限位擋板配合起限位作用,往復運動桿在運動過程中該凸起與限位板周期性碰撞產生沖擊。該凸起兩側附一層橡膠薄片在限位碰撞中起緩沖作用,避免碰撞時加速度過大。
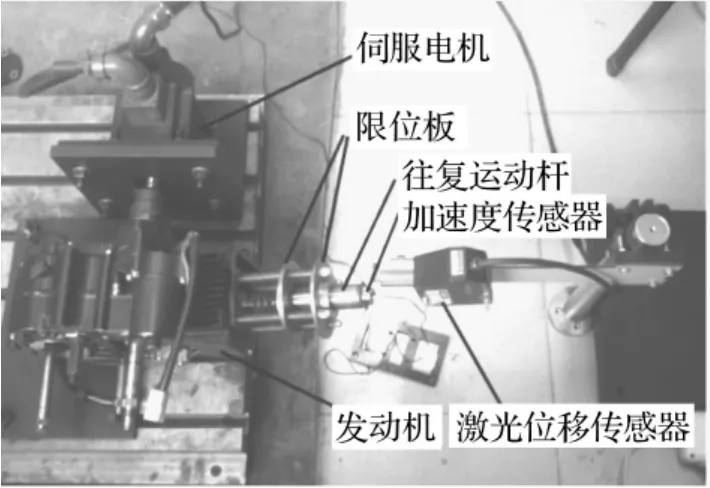
圖4 含限位沖擊振動實驗臺Fig.4 Vibration test platform
實驗中用PCB-356A25加速度傳感器測試加速度,采樣頻率25.6 kHz;用LK-G80激光位移傳感器測試位移信號,采樣頻率200 Hz。電機轉速為199 r/ min時通過實驗裝置所得往復運動桿加速度及位移曲線見圖5、圖6。對圖5加速度時間歷程進行傅里葉變換,獲得幅值譜見圖7。
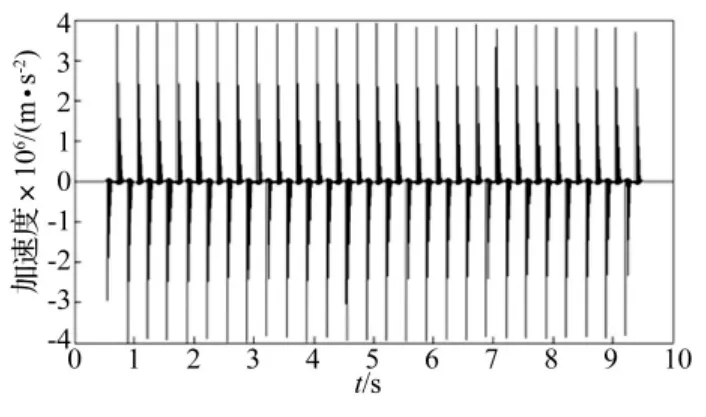
圖5 往復運動桿加速度時間歷程Fig.5 The acceleration time history of reciprocating rod
2.2 積分方法對比
由圖7可知,加速度幅值譜內第一峰值(基頻)對應頻率為3.1 Hz,加速度信號低頻無明顯噪聲信號,故選目標頻率、目標精度值為fT=3.1 Hz,αT=0.98。按流程(圖3)對加速度時間歷程(圖5)積分,并將結果與實際位移(圖6)及高通濾波積分算法[1]、低頻置零積分算法[2-3]、多項式擬合積分算法[5]、直接積分所得位移進行對比,見圖8。按圖8中標注進行局部放大,見圖9~圖11。其中多項式擬合算法所得趨勢項多項式為:1.359 2 x2-5.824 9x+3.238 3;低頻置零算法所用低頻截止頻率2 Hz;濾波算法用基于matlab的二階FIR數字濾波器,截止頻率2 Hz。由圖8看出,除直接積分算法出現較大趨勢項誤差外,其它算法趨勢項控制效果均良好;但由圖9~圖11看出,本文積分算法獲得位移曲線與實際位移曲線吻合程度更高,較傳統積分算法,對積分誤差控制更有優勢。

圖6 往復運動桿位移時間歷程Fig.6 The displacement time history of reciprocating rod

圖7 加速度幅值譜Fig.7 The amplitude spectrum of acceleration

圖8 積分算法對比Fig.8 Comparison of integration algorithm

圖9 積分算法對比Fig.9 Comparison of integration algorithm

圖10 積分算法對比Fig.10 Comparison of integration algorithm
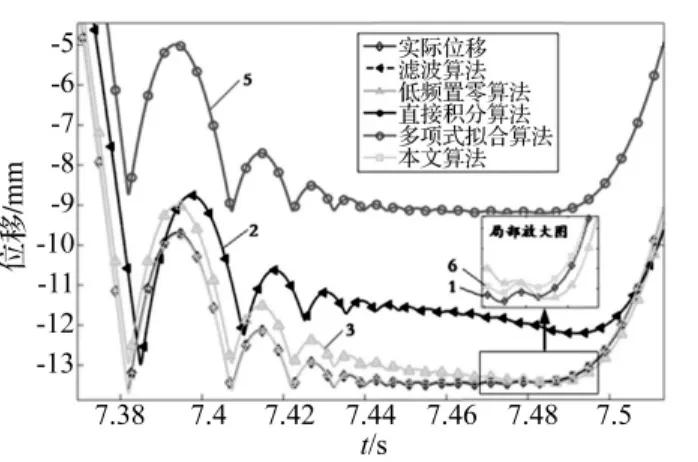
圖11 積分算法對比Fig.11 Comparison of integration algorithm
3 頻域積分算法應用研究
為進一步研究圖3積分算法在工程測試應用中特點,本文通過實驗研究對該特點進行評價。用含限位沖擊的振動測試實驗臺(圖4)進行測試。實驗中通過控制電機轉速n控制往復運動桿基頻f0,二者關系為

3.1 實驗測試及數據對比
電機轉速為54 r/min時測得往復運動桿位移信號、加速度信號見圖12、圖13。據加速度曲線幅值譜,選積分精度0.94,積分得位移曲線與測試位移曲線對比(局部放大)見圖14。

圖12 電機轉速54 r/min實測加速度曲線Fig.12 Test acceleration atn=54 r/min
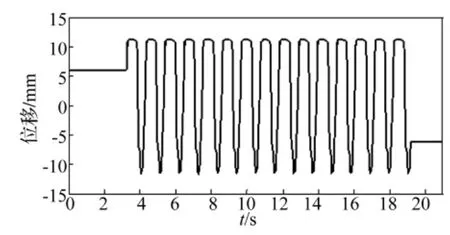
圖13 電機轉速54 r/min實測位移曲線Fig.13 Test displacement atn=54 r/min

圖14 電機轉速54 r/min位移對比Fig.14 Displacement contrast atn=54 r/min

圖15 電機轉速120 r/min位移對比Fig.15 Displacement contrast atn=120 r/min
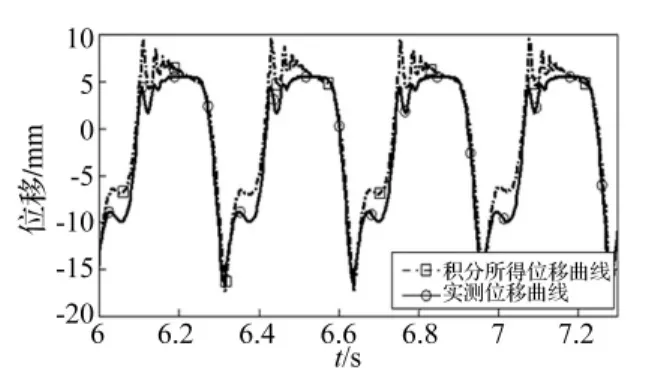
圖16 電機轉速186 r/min位移對比Fig.16 Displacement contrast atn=186 r/min

圖17 電機轉速252 r/min位移對比Fig.17 Displacement contrast atn=252 r/min
電機轉速為120、186、252、318 r/min時選積分精度0.96,通過圖3流程積分得位移曲線與測試位移曲線對比(局部放大)見圖15~圖18。由四圖看出,電機轉速較大時,在限位塊及彈簧共同作用下往復運動桿出現回彈現象,即位移曲線峰值附近的局部震蕩。
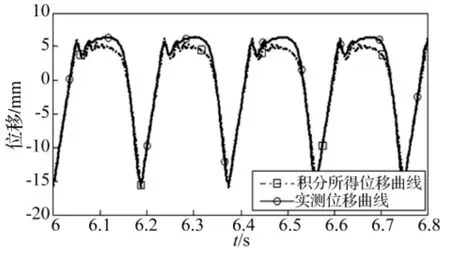
圖18 電機轉速318 r/min位移對比Fig.18 Displacement contrast atn=318 r/min
3.2 誤差評價
用平均峰值誤差[9]對不同電機轉速的積分誤差進行評價。誤差計算式為

按式(12)進行誤差評價,得積分誤差曲線見圖19。由圖19看出,加速度信號基頻較低時積分誤差較大(如基頻為0.95 Hz時積分峰值誤差為25.32%),但加速度信號基頻越大積分誤差越小;加速度基頻信號高于一定值時積分峰值誤差小于10%(本文高于3.8 Hz),基本滿足工程測試需求;加速度基頻大于4.35 Hz時積分峰值誤差小于5%,測試效果更好。

圖19 積分誤差曲線Fig.19 Error curve of integral
4 結論
(1)本文基于文獻[6-7]研究,對加速度信號直接在頻率內積分,利用積分精度控制方程保證積分精度,可節省濾波器設計計算環節、簡化積分過程、避免濾波器頻域振蕩。
(2)利用含限位沖擊振動實驗裝置獲得位移-時間信號及加速度信號,通過用各種位移積分方法對加速度積分、對比實驗位移曲線,證明本文積分算法對積分精度控制有一定優勢。
(3)加速度信號基頻較低時積分誤差大;但隨待積分加速度信號基頻提高積分所得位移信號可靠性提高。
[1]Smyth A,Wu M L.Multirate Kalman filteringfor the data fusion of displacement and acceleration response measurements in dynamic system monitoring[J].Mechanical Systems and Signal Processing,2007,21:706-723.
[2]顧名坤,呂振華.基于振動加速度測量的振動速度和位移信號識別方法探討[J].機械科學與技術,2011,30(4):522-526.
GU Ming-kun,Lü Zhen-hua.Identification of a mechanism's vibration velocity and displacement based on the acceleration measurement[J].Mechanical Science and Technology for Aerospace Engineering,2011,30(4):522-526.
[3]徐慶華.試采用FFT方法實現加速度、速度與位移的相互轉換[J].振動、測試與診斷,1997,17(4):30-34.
XU Qing-hua.Using the FFT method to achieve the conversion of acceleration,velocity and displacement[J].Journal of Vibration,Measurement&Diagnosis,1997,17(4):30-34.
[4]Stiros S.Errors in velocities and displacements deduced from Accelerographs:an approach based on the theory of error propagation[J].Soil Dynamics and Earthquake Engineering,2008,28:415-420.
[5]陳為真,汪秉文,胡曉婭.基于時域積分的加速度信號處理[J].華中科技大學學報(自然科學版),2010,38(1):1-4.
CHEN Wei-zhen,WANG Bing-wen,HU Xiao-ya.Acceleration signal processing by aumerical integration[J].Huazhong Univ.of Sci.&Tech.(Natural Science Edition),2010,38(1):1-4.
[6]Hong Y H,Kim H K,Lee H S.Reconstruction of dynamic displacement and velocity from measured accelerations using the vibrational statement of aninverse problem[J].Journal of Sound and Vibration,2010(329):4980-5003.
[7]Lee H S,Hong Y H,Park H W.Design of an FIR filter for the displacement reconstruction using measured acceleration in low-frequency dominant structures[J].International Journal for Numerical Methods in Engineering,2010,82:403-434.
[8]朱文發,柴曉冬,鄭樹彬,等.基于積分濾波器的位移信息獲取[J].儀表技術與傳感器,2012(5):62-64.
ZHU Wen-fa,CHAI Xiao-dong,ZHENG Shu-bin,et al.Obtaining displacement information based on integration filter[J]. Instrument Technique and Sensor,2012(5):62-64.
[9]Park K T,Kim S H,Park H S,et al.The determination of bridge displacement using measured acceleration[J].Engineering Structures,2005,27:371-378.
Integration algorithm based on trend-control of error in frequency domain
HU Yu-mei,ZHOU Ying-jie,ZHU Hao,CHEN Xian-liang,SUN Ji-ming,PI Yang-jun
(Mechanical transmission State Key Laboratory of Chongqing University,Chongqing 400044,China)
The paper presents the results of an integration algorithm developed to reduce the trend of error that usually appears in the process of acceleration integration for displacement in engineering test.The integration of acceleration was conducted directly in frequency domain and the integral accuracy was governed by a controlling equation. Experiments were conducted to compare the integration algorithm with conventional methods and the results indicate that it is privileged to better control the trend of error.Vibration experiments with impact of limit displacement were introduced to investigate the characteristics of the integration algorithm.It's to be noted that the integral trend of error is reduced effectively by the integration algorithm,and it is decreasing with increasing acceleration baseband.The magnitude of integral error is less than 10%while the baseband of the acceleration signal exceeds 3.8 Hz and less than 5%while exceeds 4.35 Hz,which could satisfy the engineering requirements more effectively.
acceleration integration;displacement;integration in frequency domain;error control
TP274
A
10.13465/j.cnki.jvs.2015.02.030
國家自然科學基金(51105389);高等學校博士學科點專項科研基金資助課題(20130191110004)
2013-04-16修改稿收到日期:2014-01-09
周英杰男,碩士,1985年生
胡玉梅女,博士,教授,1964年生
郵箱:cdrhym@163.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
