基于Laplace的顯微物體三維形貌快速重構
2015-05-30 00:44:59胡致杰何曉昀
軟件工程 2015年9期
胡致杰 何曉昀

摘 要:顯微物體表面三維形貌觀測與分析在工業、醫學、藝術、計算機等領域具有越來越重要的應用價值,也發揮著越來越重要的作用。該文以能夠快速、廉價、非接觸地重構出顯微物體三維形貌為目標,提出一種基于改進的Laplace算子值進行圖像的聚焦評價、高度測量和三維重構的方法,該方法通過計算每個像素點的改進Laplace值,幫助用戶快速實現顯微物體的三維形貌重構,將顯微物體的形貌觀測和分析從二維擴展到三維。大量的實驗結果和用戶體驗反饋信息進一步驗證了該方法的有效性和實用性。
關鍵詞:Laplace算子;顯微物體;聚焦評價;聚焦高度;三維重構
中圖分類號:TP391.4 文獻標識碼:A
1 引言(Introduction)
由于社會的發展,越來越多行業對微觀物體表面形貌觀測的要求也越來越高,以獲取微觀物體更多的表面形貌信息,比如工業分析、醫學分析等[1]。但是,由于普通顯微鏡的固有特性,只有聚焦區域的圖像成像清晰,非聚焦區域的圖像成像模糊。因此普通顯微鏡無法實現在同一景深中對顯微物體表面形貌的全聚焦,更不能重構其三維形貌。
隨著計算機圖像處理技術的快速發展,在普通顯微鏡下實現顯微物體形貌的三維重構已成為可能,普通顯微鏡下的多聚焦圖像經過相應變換,可重構出微觀物體的三維形貌[2,3]。
2 三維形貌重構的基本原理(Principles of 3D
reconstruction)
從聚焦圖像獲取高度DFF[4,5](Depth From Focus)的基本原理是:首先通過計算機控制步進電機勻速從下而上、由遠而近地調整顯微鏡的Z軸位置,利用攝像頭獲取微觀物體的序列圖像1—n,并將每幅圖像的圖像信息記錄在三維矩陣f(x,y,i)中;然后判斷每幅圖像的聚焦區域和非聚焦區域;最后通過聚焦分析獲取聚焦區域的深度信息,從而完成顯微物體形貌的三維重建,DDF基本原理圖如圖1所示[6,7]。
3 三維形貌重構的相關算法(Algorithms of 3D
reconstruction)
3.1 聚焦評價算法
要準確判斷序列圖像中的聚焦區域和非聚焦區域,就必須對圖像的聚焦程度進行判斷,常用的測量聚焦程度的算法有灰度方差算法、梯度算法、Laplace算法和改進的Laplace算法等[8]。
Laplace算法是二階導數算法,可獲取圖像的高頻分量,但對x、y兩個方向的二階偏導數可能會符號相反,數值相互抵消,使圖像的聚焦產生偏差[9,10],所以采用改進的Laplace算法作為聚焦評價算法,其計算方法如下:
(1)
為便于計算通常用差分代替微分,可得式(2)。
(2)
(2)
將式(2)應用到圖像系列1—n中,計算出每個點在圖像系列的改進Laplace算子值ML(x,y,i),將計算結果構成一個三維矩陣,但由于在實際操作中存在多種干擾因素,若直接采用計算結果將對三維形貌的重構產生較大影響,通過實驗比較發現對計算結果進行一次步長為2的中值濾波操作可以得到更好的效果,中值濾波算法為[11,12]:
(3)
其中,ML(x,y,i)是點(x,y)在第i幅圖像中計算出來的改進Laplace算子值,MML(x,y,i)是經中值濾波后的濾波值。
在每幅圖像中都存在背景圖像和物像[13],聚焦的物像是進行圖像融合和三維重構的關鍵,因此需在圖像中提取聚焦的物像,分離背景。由于改進的Laplace算法對圖像的高頻分量比較敏感,聚焦圖像的改進Laplace算子值比較高,非聚焦圖像或背景的改進Laplace算子值比較低,通過設置合適的閾值T,如果點(x,y)在圖像序列中所有的中值濾波值都小于閾值T,則可判定它為背景。
取出點(x,y)在圖像系列中的濾波值MML(x,y,i)大于或等于閾值T的那些數據,取其最大值作為聚焦值,表示為:
(4)
其中,FP(x,y)表示點(x,y)的聚焦值,即MML(x,y,i)在閾值以上的最大值。
3.2 顯微物體高度測量算法
在本文中顯微物體的高度采用的是相對高度而非真實高度,由于步進電機推動顯微鏡Z軸勻速移動,顯微物體與顯微鏡頭之間的距離構成線性關系(s=v*t),同時圖像采集攝像機采集圖像的速度也是恒定的,因此顯微物體的高度就與圖像的序號i對應起來(s→t),故采用圖像的序號i作為顯微物體的相對高度,表示為:
(5)
其中,FH(x,y)表示點(x,y)的相對聚焦高度,當點(x,y)在序號為m圖像上的中值濾波值等于它的聚焦值,意味著點在第m幅圖像上聚焦,故取m作為該點的聚焦高度;如果點是背景,就統一將高度確定為固定的序號N。
3.3 多聚焦圖像融合算法
圖像系列中的每幅圖像都存在聚焦區域和非聚焦區域,從式(4)中可知,每個點的聚焦位置基本位于序列號不同的圖像上,多聚焦圖像融合就是將每個點的聚焦圖像“拼接”到一幅二維圖像上,從而得到清晰的顯微物體全景深圖像[14]。融合算法思想如下:根據式(5)可以確定像素點的聚焦位置,取出其聚焦位置的像素信息作為融合圖像的像素信息,對圖像中的每個點皆進行該操作就可完成全景深圖像的融合,用公式表示為。
(6)
其中,f(x,y,m)是點(x,y)在聚焦高度為m處的像素,f(x,y)是全景深圖像矩陣。
3.4 三維形貌重構算法
根據式(6)和式(5)可分別獲得每個像素點的聚焦信息和聚焦時的高度信息,利用這兩個信息可以重構出該像素點的三維形貌,對像素矩陣執行相同的操作即可重構出全部三維形貌。
4 實驗結果與分析(Experimental results and
analysis)
為進行實驗驗證,將普通顯微鏡進行改裝,整個實驗系統包括計算機、天敏SDKZ000圖像采集卡、Panasonic WV-GP470彩色數字攝像機、STEPPING MOTOT-42HSZA47-254步進電機、TMS320LF2407DSP控制模塊和普通光學顯微鏡。
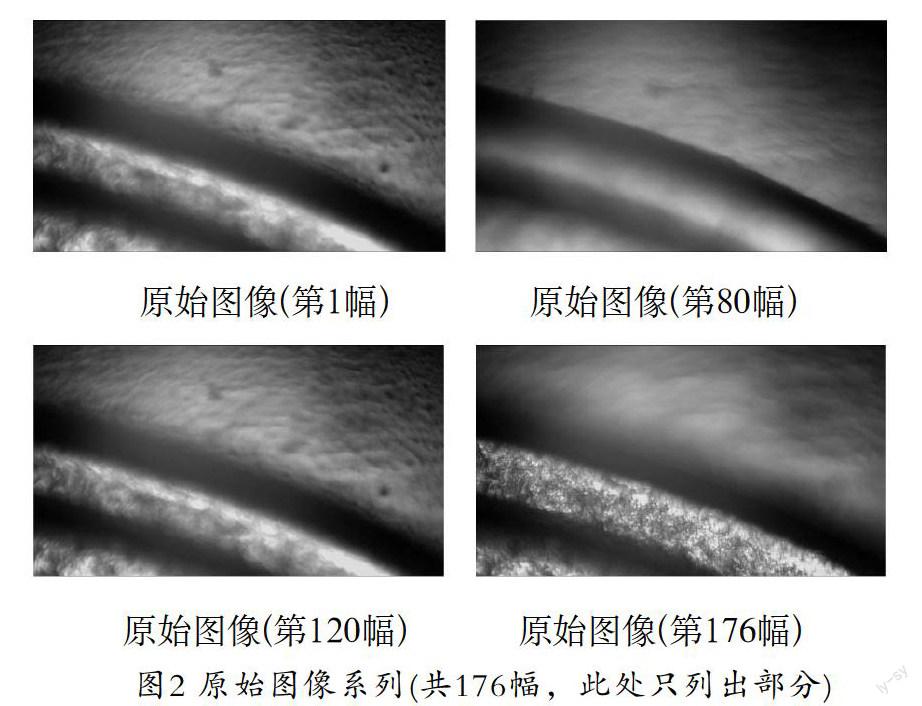
實驗觀測對象為五角銅硬幣邊緣,圖像采集卡每隔370ms采集一張圖片,共計采集176幅圖像,部分原始圖像如圖2所示。
Fig.2 Original image series (Total 176, part of the list here)
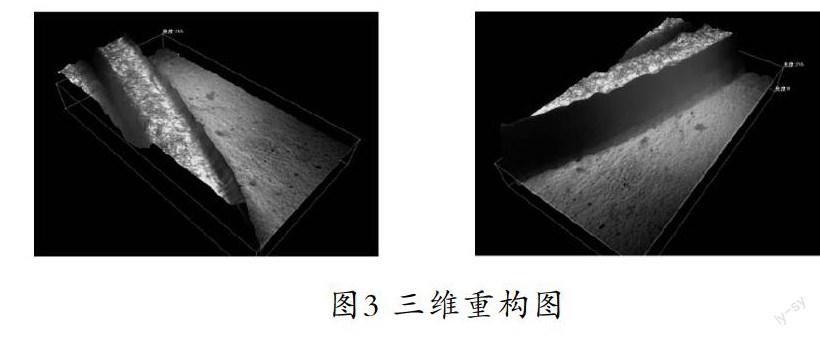
采用公式(3)和公式(4)求取每個像素點的中值濾波值和聚焦圖層號,利用公式(5)和公式(6)獲得每個像素點的聚焦高度,從而完成顯微形貌的三維重構,重構后的效果圖如圖3所示。
通過對以上實驗效果圖的分析和比較,利用Laplace算子作為聚焦評價標準能較好地重構出顯微物體三維形貌,它真實清晰地反映出物體的顯微結構,是工業分析、醫學分析的一個較好解決方案。
5 結論(Conclusion)
通過理論分析和實驗驗證,證明利用顯微物體的二維圖像重構出其三維形貌是可行的,利用改進的Laplace算子作為二維圖像的聚焦評價標準能較好地測量出顯微物體的聚焦高度,從而較準確地重構出顯微物體的三維形貌。
此重構方法采用普通顯微鏡重構出三維形貌,讓觀察者更能全面、細致地觀測和分析顯微物體,將分析從二維擴展到三維。同時,由于普通顯微鏡價格低廉,可以極大地降低觀測和研究成本。當然此重構方法也存在不足和改進之處,首先,該方法計算量大,運行速度較慢,內存消耗較大,不能進行實時重構;其次,圖像系列始終從一個方向(Z軸)進行采集,不能實現多角度采集,無法重構出顯微物體的全部三維形貌。這些都是以后改進的方向。
參考文獻(References)
[1] 王伯雄,朱彥民,羅秀芝.三維形貌的快速測量方法[J].清華大
學學報,1999,32(2):57-58.
[2] 陳曉榮,蔡萍,施文康.光學非接觸三維形貌測量技術新進展
[J].光學精密工程,2000,10(05):528-532.
[3] Takasaki H Moir.topography[J].Appl.Opt.,2013,9(10):1467-
1472.
[4] 韓冬兵.基于Depth from Focus的序列顯微圖像融合與三維測
量技術研究[M].北京航空航天大學碩士學位論文,2004.
[5] John Ens,Peter Lawrence.an investigation of methods for
determining depth from focus.IEEE Transactions on pattern
analysis and machine intelligence,2013,15(2):97-108.
[6] 王金巖,史文華,敬忠良.基于Depth from Focus的圖像三維重
建[J].南京航空航天大學學報,2007,02:181-186.
[7] Shree K.Nayar,Yasuo Naka.Shape from Focus[J].IEEE
Transactions on pattern analysi and machine intelligence,
2014,16(8):824-830.
[8] 何曉昀.磨粒表面形貌分析與三維重構[M].武漢理工大學碩
士學位論文,2005.
[9] M.Subbarao,and T.S.Choi.Accurate Recovery of Three
Dimensional Shape from Image Focus[J].IEEE Trans. Pattern
Analysis and Machine Intelligence,2005 17(3):266-274.
[10] H.H.Hookins.The frequency response of a defocused optical
system[J].Proc,Royal Soc,London,A,2011,231:91-103.
[11] Volder Tympel.Three Dimensional Animation with a
Conventional Light Microscopy[C].Proceedings of Three-
Dimensional Microscopy: Image Acquisition and Processing
IV,SPIE,2013,2984:190-198.
[12] Alex P.Pentland.A new sense for depth of field[J].IEEE Trans
Patt Anal Machine Intelligence,2011,9(4):523-531.
[13] M.Subbarao,Y F.Liu.Accurate Reconstruction of Three-
dimensional Shape and Focused Image from a Sequence of
Noisy Defocused Images[C].Proceedings of SPIE Conference
on Three-Dimensional Imaging and Laser-Based Systems for
Metrology and Inspection,2010(11):178-191.
[14] A.P.Pentland.Depth of Scene from Depth of Field[M].Proc.
Image Understanding Workshop,2012.
作者簡介:
胡致杰(1974-),男,碩士,講師.研究領域:數據挖掘,圖像
處理.
何曉昀(1978-),男,碩士,講師.研究領域:模式識別,圖像
處理.