電機(jī)矢量控制的相電流采樣與濾波方法的研究
2015-05-30 11:07:29葉維民
科技創(chuàng)新與應(yīng)用 2015年32期
關(guān)鍵詞:永磁同步電機(jī)

摘 要:電流的采樣對(duì)電機(jī)矢量控制是非常重要的。在低成本應(yīng)用場合,采用雙電阻相電流采樣的方法具有一定的優(yōu)勢。論文對(duì)雙電阻相電流采樣原理進(jìn)行了闡述,并對(duì)相電流波形進(jìn)行了分析,提出了適用的數(shù)字濾波方法。并經(jīng)過實(shí)驗(yàn)驗(yàn)證了雙電阻相電流采樣原理的正確性和數(shù)字濾波方法的有效性。
關(guān)鍵詞:電機(jī)矢量控制;永磁同步電機(jī);電流采樣;數(shù)字濾波
引言
20世紀(jì)70年代西門子工程師F.Blaschke首先提出異步電機(jī)矢量控制理論來解決交流電機(jī)轉(zhuǎn)矩控制問題。矢量控制實(shí)現(xiàn)的基本原理是通過測量和控制電機(jī)定子電流矢量,根據(jù)磁場定向原理分別對(duì)電機(jī)的勵(lì)磁電流和轉(zhuǎn)矩電流進(jìn)行控制,從而達(dá)到控制電機(jī)轉(zhuǎn)矩的目的。
在交流電機(jī)矢量控制策略中,相電流采樣性能是一個(gè)重要的指標(biāo)。在對(duì)成本要求高的應(yīng)用場合,如何低成本地獲得好的電流采樣性能成為關(guān)鍵問題。
電流檢測通常有以下幾種方式:(1)電阻采樣;(2)霍爾電流傳感器;(3)電流互感器。電阻采樣通過測量電阻上的壓降來計(jì)算電流大小,適合于被測電流較小的場合。霍爾電流傳感器測量精度高、線性度好、響應(yīng)快、使用簡單,但價(jià)格比較昂貴。電流互感器體積較大,造價(jià)昂貴,適合于被測電流大的場合。對(duì)于小功率的伺服驅(qū)動(dòng)器適合采用電阻采樣方式,文章以雙電阻電流采樣方式[1]展開分析。
1 雙電阻相電流的采樣原理
雙電阻采樣方式的典型電路如圖1所示,微處理器對(duì)某兩相電流通過采樣電阻進(jìn)行采樣,再根據(jù)iu、iv、iw的矢量和為零,即:iu+iv+iw=0的理論推算出第三相電流的值。從采樣電阻上獲取的電壓信號(hào),經(jīng)過電壓偏置和放大[2]后,輸入到微處理器的A/D單元。雙電阻采樣的邏輯如圖2所示,電流采樣時(shí)刻是在三相上橋臂都截止的時(shí)刻進(jìn)行的,因?yàn)橹挥性谶@個(gè)時(shí)刻才能保證采樣電阻上均有反映該相電流的電流流過,只是此時(shí)可能采樣得到的電流是續(xù)流電流,不過續(xù)流電流也可以真實(shí)的反映相電流的值。由此可見,雙電阻采樣方法也可以實(shí)現(xiàn)三相定子電流的重構(gòu)。
根據(jù)以上分析,雙電阻采樣方法可以實(shí)現(xiàn)三相定子電流的重構(gòu),不過由圖2可見該方案也存在電流采樣盲區(qū)問題,就是當(dāng)電流采樣相為電壓最大相時(shí),如果該相占空比比較高的時(shí)候,電流可采樣的區(qū)間(電壓最大相下橋臂開通區(qū)間)就變得狹窄,考慮到IGBT剛切換時(shí)會(huì)有比較大的電流震蕩的問題,使得電流采樣誤差比較大。目前解決的辦法是限制電壓最大占空比,通用限制在95%以下。這里采樣電阻的選取很關(guān)鍵,負(fù)載一定時(shí),如果采樣電阻的阻值小,則壓降小,在電機(jī)回路中不會(huì)產(chǎn)生很大的影響;如果采樣電阻的阻值過大,會(huì)引起電壓損耗,減小能量效率,且較大的阻值還會(huì)使負(fù)載電壓發(fā)生偏移,產(chǎn)生電磁干擾,產(chǎn)生系統(tǒng)對(duì)噪聲敏感等問題;此外選取采樣電阻時(shí),還要考慮電阻的穩(wěn)定性能和阻值誤差[3]。
2 相電流的濾波
由于永磁同步電機(jī)的寬范圍調(diào)速及高速特性,在電機(jī)設(shè)計(jì)時(shí)不易獲得理想的正弦氣隙磁場[4],同時(shí)電力電子裝置的非線性特性,導(dǎo)致在系統(tǒng)控制時(shí)采樣的相電流含有不規(guī)則的高次諧波和隨機(jī)干擾。再加上電流采樣電路的穩(wěn)定性及A/D轉(zhuǎn)換單元偏差的存在,更是加大了實(shí)際采樣到的電流波動(dòng)。另外,在系統(tǒng)電路中采用的開關(guān)電源、大功率電磁鐵等電路,可能還會(huì)引起很大干擾。
可見,永磁同步電動(dòng)機(jī)相電流中,含有各種高次、隨機(jī)的諧波。其中包含PWM斬波引起的高頻諧波,有因電機(jī)非正弦反電勢引起的低次諧波,還有電力電子線路因干擾出現(xiàn)的隨機(jī)脈沖。因此,在系統(tǒng)控制中,需要采用不同的硬件和數(shù)字濾波方法。硬件濾波是在電流采樣電路上增加LC濾波電路,用于去除逆變器的功率開關(guān)斬波引起的干擾。軟件濾波用于去除隨時(shí)脈沖干擾和由低次諧波引起的噪聲。
采用550W伺服驅(qū)動(dòng)器(載波頻率16KHz),配4極15槽永磁同步電機(jī)進(jìn)行測試。在3500rpm輕負(fù)載下,用示波器分時(shí)測得U、V相電流如圖3所示,相電流波形除了由于斬波引起的高次諧波外,還由于電機(jī)反電勢、齒槽等影響,使相電流呈現(xiàn)的不是正弦波。
從處理器A/D轉(zhuǎn)換后,獲取的相電流數(shù)值如圖4所示,相電流又增加了由于A/D電路引起的隨機(jī)電流尖峰。
2.1 程序判斷濾波
對(duì)于隨機(jī)電流尖峰,通常采用限幅濾波法或限速濾波法[5]來實(shí)現(xiàn)消除。電機(jī)相電流是個(gè)動(dòng)態(tài)的信號(hào),既要考慮采樣值的實(shí)時(shí)性,又要顧及采樣值的連續(xù)性。文章實(shí)際采用如下濾波算法:設(shè)順序采樣時(shí)刻t1,t2,t3的采樣值分別為Y(1),Y(2),Y(3),ΔY1和ΔY2為根據(jù)現(xiàn)場情況確定的門限值,其中ΔY1<ΔY2。具體算法如式(1)所示。
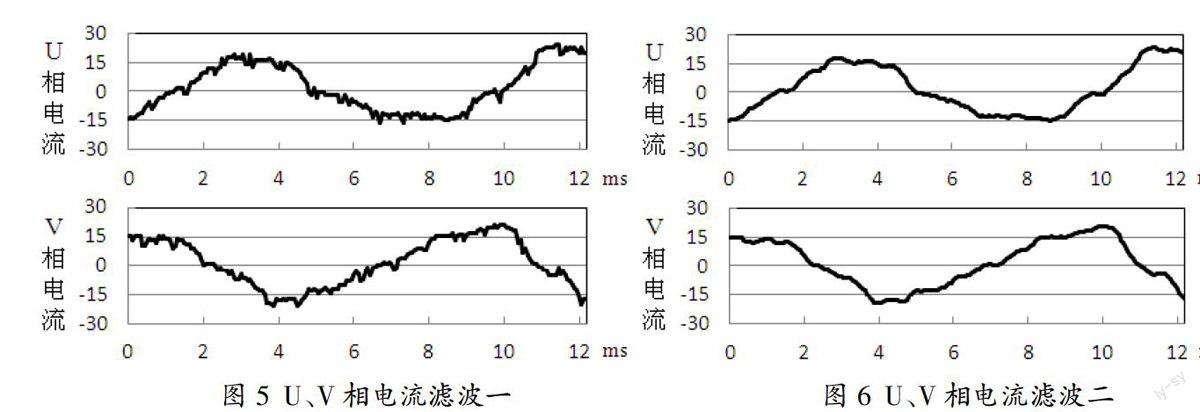
采用程序判斷濾波后,消除了隨機(jī)的電流尖峰,如圖5所示。
2.2 算術(shù)平均值法
圖5所示的相電流波形中還存在著低次諧波,由于它在時(shí)間域的頻率是不確定的,這里采用平均值濾波法[7]來處理,具體算法如式(2)所示。
算術(shù)平均值法對(duì)信號(hào)的平滑濾波程度完全取決于n。
當(dāng)n較大時(shí),平滑度高,但靈敏度低,即外界信號(hào)的變化對(duì)測量計(jì)算結(jié)果Y的影響小;當(dāng)n較小時(shí),平滑度低,但靈敏度高。電機(jī)相電流是個(gè)動(dòng)態(tài)的信號(hào),應(yīng)視具體情況選取n。采用算術(shù)平均值法濾波后,消除了圖5波形中的大部分低次諧波,如圖6所示。經(jīng)過兩次濾波后,相電流的波形得到了顯著的優(yōu)化。
3 系統(tǒng)的實(shí)驗(yàn)結(jié)果
采用上述550W伺服驅(qū)動(dòng)器和電機(jī),在測功機(jī)上進(jìn)行相電流濾波前后的對(duì)比測試,結(jié)果如下:(1)電機(jī)3500rpm恒速運(yùn)行,測功機(jī)不加載時(shí):控制器輸入功率由濾波前的73.47W下降到濾波后的55.01W。(2)電機(jī)3500rpm恒速運(yùn)行,測功機(jī)加1.3Nm扭矩進(jìn)行定點(diǎn)測試時(shí):控制器的效率由濾波前的81.35%上升到濾波后的82.51%。
由上述結(jié)果可以看出,采用了相電流濾波的伺服系統(tǒng),減少了功耗,提升了系統(tǒng)的效率。
4 結(jié)束語
由以上分析及實(shí)驗(yàn)結(jié)果可以看出,在采用雙電阻相電流采樣的伺服控制系統(tǒng)中,通過復(fù)合數(shù)字濾波方法能夠?qū)⒂蒔WM斬波引起的高頻諧波、電機(jī)非正弦反電勢引起的低次諧波、電力電子線路因干擾出現(xiàn)的隨機(jī)脈沖等因素引起的相電流噪聲得到有效的抑制,提高了電機(jī)運(yùn)行的平穩(wěn)性,有效改善了系統(tǒng)的效率。
參考文獻(xiàn)
[1]張?zhí)m紅,鄭慧麗.異步電機(jī)SVM-DTC系統(tǒng)中的相電流檢測研究[J].電測與儀表,2014,51(21):84-89.
[2]高振開,郭立新.電機(jī)控制系統(tǒng)中的電流檢測技術(shù)[J].機(jī)電工程技術(shù),2012,41(8):148-150.
[3]Jim Lepkowski. Motor Control Sensor Feedback Circuits[Z].America:Microchip Technology Inc.,2003.
[4]唐任遠(yuǎn).現(xiàn)代永磁電機(jī)理論與設(shè)計(jì)[M].北京:機(jī)械工業(yè)出版社,2005.
[5]任克強(qiáng),劉暉.微機(jī)控制系統(tǒng)的數(shù)字濾波算法[J].現(xiàn)代電子技術(shù),2003,146(3):15-18.
[6]牛余朋,成曙.單片機(jī)數(shù)字濾波算法研究[J].中國測試技術(shù),2005,31(6):97-99.
[7]宋壽鵬.數(shù)字濾波器設(shè)計(jì)及工程應(yīng)用[M].江蘇:江蘇大學(xué)出版社,2009.
[8]王曉明.電動(dòng)機(jī)的DSC控制——微芯公司dsPIC應(yīng)用[M].北京: 北京航空航天大學(xué)出版社,2009.
[9]王小明,王玲.電動(dòng)機(jī)的DSP控制[M].北京:北京航空航天大學(xué)出版社,2004.
[10]陳伯時(shí).電力拖動(dòng)自動(dòng)控制系統(tǒng)[M].北京:機(jī)械工業(yè)出版社,2012.
通訊作者:葉維民
猜你喜歡
現(xiàn)代電子技術(shù)(2017年1期)2017-02-16 11:49:32
汽車工程學(xué)報(bào)(2016年5期)2017-01-16 02:42:50
計(jì)算技術(shù)與自動(dòng)化(2016年4期)2017-01-11 14:06:23
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識(shí)與技術(shù)(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識(shí)與技術(shù)(2016年2期)2016-03-22 22:21:46
電腦知識(shí)與技術(shù)(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學(xué)學(xué)報(bào)(2015年6期)2016-02-18 00:26:49
