移動機器人同時定位與構圖中的自適應區(qū)域分割方法*
2015-06-07 10:52:06黃佳維石章松吳中紅
艦船電子工程 2015年11期
關鍵詞:移動機器人
黃佳維 石章松 吳中紅
(海軍工程大學電子工程學院 武漢 430033)
移動機器人同時定位與構圖中的自適應區(qū)域分割方法*
黃佳維 石章松 吳中紅
(海軍工程大學電子工程學院 武漢 430033)
在移動機器人同時定位與構圖中,區(qū)域分割是直線提取的第一個處理步驟,旨在降低直線提取時的迭代次數(shù),提高運算效率。針對現(xiàn)有的分割方法沒有考慮掃描間隔與掃描點距離對分割閾值影響的問題,提出了一種考慮掃描間隔與探測點距離對分割閾值影響的自適應計算方法。實驗結果表明,該方法明顯提高了區(qū)域分割的準確度和魯棒性,降低了迭代次數(shù)和運算量。
移動機器人同時定位與構圖;直線提取;距離數(shù)據(jù);激光雷達;區(qū)域分割
Class NumberTP24
1 引言
無人系統(tǒng)在越來越多的軍事應用領域發(fā)揮作用[1~2],自主化是實現(xiàn)無人系統(tǒng)遂行軍事任務的前提和保證[3],移動機器人同時定位與地圖創(chuàng)建(Mobile Robot Simultaneous Localization and Mapping,SLAM)則是機器人實現(xiàn)自主化的關鍵。移動機器人同時定位與地圖創(chuàng)建方法,主要采用基于顯著特征(feature-based)的方法進行環(huán)境描述[4],直線特征是最為常用的顯著特征之一[5],這是因為采用直線作為環(huán)境特征具有以下優(yōu)點[6]:直線特征在結構化環(huán)境存在較多;基于距離數(shù)據(jù)(激光掃描儀、聲納)易于提取直線特征;基于直線特征易于實現(xiàn)機器人的定位。
在進行直線提取時,為了降低算法的運算量,往往先進行區(qū)域分割處理,將不屬于同一障礙物的連續(xù)特征點集分割開來,然后再進行直線的分割與提取處理。文獻[7]提出了一種區(qū)域分割算法,采取了一種離散式的閾值計算方法,沒有考慮障礙物與傳感器距離遠近的影響,存在一定的缺陷,而且在計算過程中還存在平方和開方計算,影響運算效率,文獻[8]雖然提出了自適應的閾值計算方法,但是并沒有給出具體的連續(xù)點間的距離計算方法。本文針對這些不足,對閾值的確定方法進行了改進,給出了相應距離以及閾值的計算方法,提高了區(qū)域分割的精度,降低了運算量,具有較大的參考價值。
2 直線描述模型
對于激光傳感器,獲取的數(shù)據(jù)為角度信息和距離信息,因此采用極坐標的形式進行直線描述。在極坐標下,可以用極點到直線的距離r和極點到直線的垂線與極軸的夾角α表示,示意圖如圖1所示,直線描述如式(1)所示。

3 改進閾值計算方法的直線提取算法
3.1 直線提取算法的處理流程
對于直線提取問題而言,要解決以下三個方面的問題:1)量測數(shù)據(jù)中有多少條直線;2)各個量測點屬于哪一條直線;3)對于從屬于某條直線的給定量測點,怎樣估計表征該直線模型的相應參數(shù)。
完整的直線提取算法的處理流程如圖2所示,從直線提取需要解決的三個方面的問題出發(fā),算法應當包括線段分割(線段擬合)、直線提取計算[9]。大部分的直線提取算法基本都包含探測點之間的迭代計算,當掃描區(qū)域內(nèi)障礙物較多、探測點規(guī)模較大時,會導致巨大的計算耗費,因此往往首先進行同一障礙物連續(xù)特征點集合的檢測,將全局掃描特征分割為不同的連續(xù)特征的探測點集合,然后對各個點集進行直線提取處理[10]。
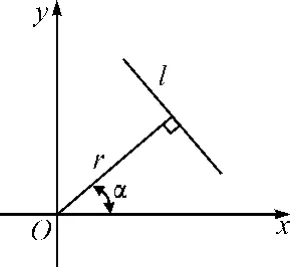
圖1 直線的極坐標描述
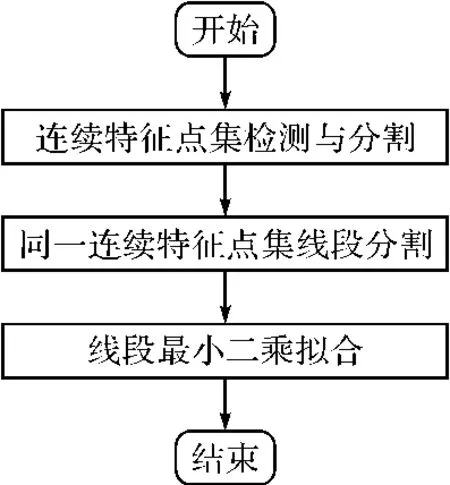
圖2 直線提取流程
3.2 改進的自適應區(qū)域分割閾值計算
激光雷達在進行掃描時,探測數(shù)據(jù)為從特定起始探測角開始以固定的角度間隔Δθ測得的角度為θ、距離為ρ的離散點。對于組成一條直線的離散點而言,兩相鄰點的距離隨著直線與傳感器的距離增大而增大,即更加稀疏,這意味著對于不同的距離ρ,存在傳感器可探測的最小尺寸,當一個障礙物的尺寸過小時,將不能獲取該障礙物的連續(xù)探測點,該尺寸的大小與掃描間隔Δθ和距離ρ成正比,因此當兩連續(xù)測量點間距離與對應于后一測量點距離的最小可探測尺寸滿足一定的關系時,可以判定兩點是否屬于同一障礙物,基于這一原理構建一種基于測量點間距離差、測量點距離ρ和掃描間隔Δθ的閾值計算方法。

圖3 連續(xù)兩點相對位置示意圖
如圖3所示,設掃描儀測得角度連續(xù)的兩點pk和pk+1,其距離傳感器的值分別為ρk和ρk+1,兩點間距離為Δlk,k+1,由于Δθ很小(Δθ<1°)時有sinΔθ≈Δθ,且一般情況下同一障礙物的連續(xù)兩次掃描的距離值ρk與ρk+1相差不大,因此兩點間距離可處理為兩點與傳感器的距離差,即

對于點pk+1而言,激光掃描儀在距離ρk+1的最小可探測尺寸為

對于不屬于同一障礙物的連續(xù)兩點而言p′k和p′k+1兩點距離Δl′k,k+1會比較大,即

其中,Δl為連續(xù)兩點是否屬于同一障礙物的判別閾值,取其為Δlk,k+1的整數(shù)倍。本文中采用的激光掃描儀為北陽URG-04LX-UG01型,實驗表明,取Δl為8倍時Δlk,k+1最為合適。
4 實驗結果與分析
實驗采用日本北陽URG-04LX-UG01型激光傳感器,在實驗室環(huán)境6m×7m環(huán)境下進行。URG-04LX-UG01型激光傳感器探測范圍為240°,掃描間隔為0.36°,每幀獲得680個數(shù)據(jù)。圖4為獲取的一幀掃描數(shù)據(jù),掃描方向為逆時針方向,(0,0)為傳感器位置。
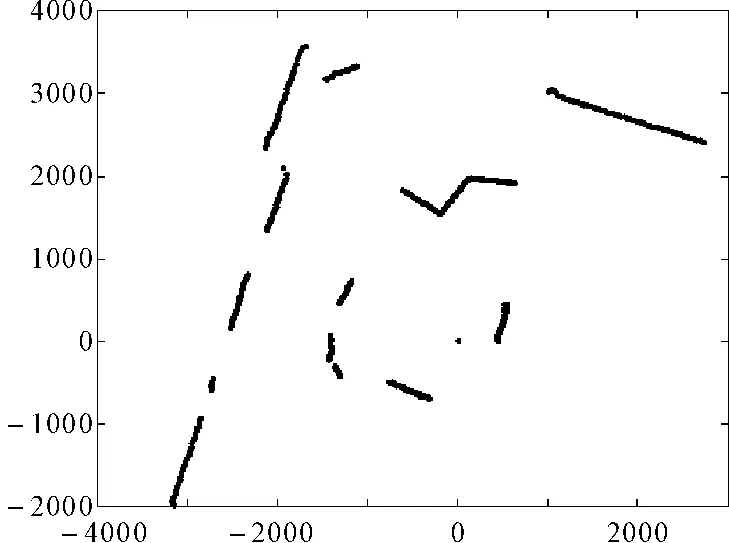
圖4 量測數(shù)據(jù)圖像
從圖5可以看出,文獻[7]中的方法在障礙物距離較遠時出現(xiàn)了將不同障礙物的點集劃分為一個區(qū)域的情況(第一行第四個子圖中包含了三個障礙物點集),區(qū)域分割精確度不足,增加了直線提取時的迭代次數(shù),提高了運算量,本文方法則準確地將圖中13個不同的障礙物點集成功的實現(xiàn)了分割,提高了分割精度,降低了運算量。
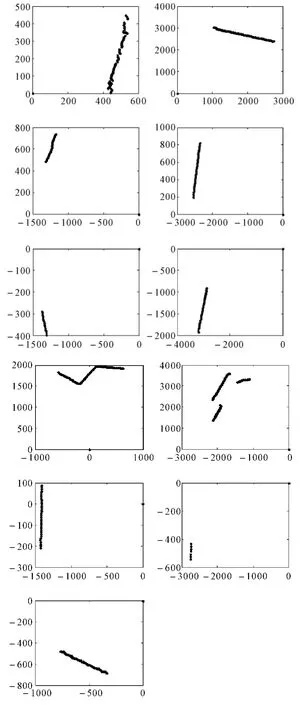
圖5 文獻[7]中的區(qū)域分割方法結果
5 結語
為降低復雜環(huán)境下的直線提取運算量,提高提取算法的效率,往往會對掃描數(shù)據(jù)進行預處理,實現(xiàn)連續(xù)特征點集的區(qū)域分割,使得直線提取只在同一障礙物的連續(xù)點集中進行迭代處理。本文考慮掃描間隔和掃描點距離不同對連續(xù)點集中點間距離的影響,提出了一種自適應的閾值計算方法,實驗表明,本文方法能夠實現(xiàn)更為精確的區(qū)域分割處理。但在計算點間距離時,采用了一些近似計算,當掃描間隔較大時,會影響距離計算精度,下一步將進行改進。
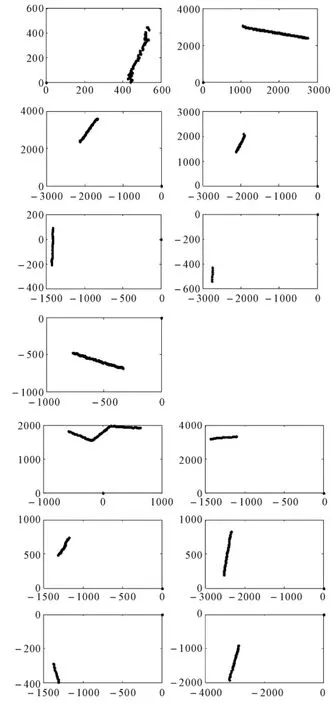
圖6 本文算法區(qū)域分割結果
[1]王金梅,龐曉賓.地面無人作戰(zhàn)平臺武器系統(tǒng)技術分析及展望[J].兵工學報,2010,31(2):163-166.
[2]王新星.無人平臺自主能力分級模型研究[D].沈陽:沈陽航空航天大學,2011:115-118.
[3]朱華勇,牛軼峰,沈林成,等.無人機系統(tǒng)自主控制技術研究現(xiàn)狀與發(fā)展趨勢[J].國防科技大學報,2010,32(3):115-120.
[4]Guivant J E,Nebot E M.Solving computational and memory requirements of feature-based simultaneous localization and mapping algorithms[J].IEEE Transactions on Robotics and Automation,2003,19(4):749-755.
[5]Bailey T.Mobile robot localization and mapping in extensive outdoor environments[D].Sydney:Australian Centre for Field Robotics(ACFR),The University of Sydney,2002.
[6]丁帥華.基于局部子圖匹配的SLAM解決方法[D].上海:復旦大學信息科學與工程學院,2009:30-32.
[7]湯曉.基于激光測距儀的移動機器人同時定位與地圖創(chuàng)建[D].濟南:山東大學碩士學位論文,2007:1-9.
[8]徐君,張國良,王俊龍.一種基于激光傳感器的自適應直線提取算法[J].計算機工程與應用,2013,49(2):43-47.
[9]梁欣廉,張繼賢,李海濤,等.激光雷達數(shù)據(jù)特點[J].遙感信息,2005(3):71-76.
[10]黃承亮,吳侃,向娟.三維激光掃描點云數(shù)據(jù)壓縮方法[J].測繪科學,2009,34(2):142-144.
Adaptive Region Segmentation Method in Mobile Robot Simultaneous Localization and Mapping
HUANG Jiawei SHI Zhangsong WU Zhonghong
(College of Electronic Engineering,Naval University of Engineering,Wuhan 430033)
In order to decrease the iterative number during line extraction processing,increase the operation efficiency,region segmentation would be the first process.Aiming at the problem that not take the influences of scan angle and point distance in existing method,a new region segmentation method based on scan angle and point distance is proposed.The result of experimentation shows that the accuracy and robustness have been improved significantly by new method,and the operation efficiency has been improved.
mobile robot simultaneous localization and mapping,line extraction,distance data,laser radar,region segmentation
TP24DOI:10.3969/j.issn.1672-9730.2015.11.017
2015年5月11日,
2015年6月29日
黃佳維,男,碩士研究生,研究方向:移動機器人同時定位與地圖創(chuàng)建。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統(tǒng)學報(2015年4期)2015-12-27 09:38:35
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19