抗擾動的捷聯(lián)慣導系統(tǒng)回溯參數(shù)辨識對準法
2015-06-15 19:19:45張朝飛羅建軍侯永利
中國慣性技術(shù)學報 2015年6期
張朝飛,羅建軍,侯永利
(1. 西北工業(yè)大學 航天學院,西安 710072;2. 航天飛行動力學技術(shù)重點實驗室,西安 710072;3. 中國航天第十六研究所,西安 710100)
抗擾動的捷聯(lián)慣導系統(tǒng)回溯參數(shù)辨識對準法
張朝飛1,2,羅建軍1,2,侯永利3
(1. 西北工業(yè)大學 航天學院,西安 710072;2. 航天飛行動力學技術(shù)重點實驗室,西安 710072;3. 中國航天第十六研究所,西安 710100)
針對捷聯(lián)慣導系統(tǒng)參數(shù)辨識對準法航向角估計時間長且收斂速度受到計算初值影響大的問題,提出了將對準用的陀螺和加速度計采樣數(shù)據(jù)存儲后按時間進行正向和逆向排列,形成正向序列和逆向序列。由正向?qū)Ш降慕馑愎酵茖С瞿嫦驅(qū)Ш降慕馑愎剑霉降囊恢滦蕴岢隽嘶厮菡`差參數(shù)辨識對準法。利用抗擾動的慣性系對準算法為回溯參數(shù)辨識法提供對準初值,應(yīng)用回溯參數(shù)辨識法對誤差參數(shù)反復(fù)進行逆向和正向辨識后對對準結(jié)果進行修正,能夠有效提高對準精度。實驗結(jié)果表明,利用相同時間的采樣數(shù)據(jù),該算法航向角的對準誤差僅為改進前算法的25%。
捷聯(lián)慣導系統(tǒng);抗擾動;回溯;參數(shù)辨識對準
初始對準技術(shù)是捷聯(lián)慣性導航系統(tǒng)中一項重要技術(shù),對準的快速性和高精度是其主要的指標。目前常用的對準方法有多位置對準法和單位置對準法。其中,多位置對準算法能夠提高對準參數(shù)的可觀測性,但是需要增加高精度的轉(zhuǎn)位機構(gòu)才能實現(xiàn)[1-4]。單位置對準算法有:① 經(jīng)典三階調(diào)平回路及方位羅經(jīng)對準法[5-6],該算法收斂緩慢,適用于艦船等長時間對準,不利于快速對準;② 卡爾曼濾波對準算法[7-8],該算法狀態(tài)方程維數(shù)高,計算量大且收斂性受模型參數(shù)的影響較大;③ 參數(shù)辨識對準法[9],該算法原理簡單,易于實現(xiàn),因此廣泛應(yīng)用于捷聯(lián)慣導系統(tǒng)的初始對準中,但該算法誤差參數(shù)收斂速度慢,航向角對準時間受速度誤差的影響,辨識精度差。
因此,本文在文獻[9]的基礎(chǔ)上,改進了將陀螺和加速度計的采樣數(shù)據(jù)按時間順序先進行粗對準再進行精對準的單向?qū)史绞剑岢隽艘环N抗擾動的捷聯(lián)慣導系統(tǒng)回溯參數(shù)辨識對準法。
通常提高對準精度的方法是減少對準時的干擾和增加對準時間,使得初始對準誤差在導航誤差中的所占的比重隨之增加,從而易于被辨識。但對準時的干擾通常難以避免,而增加對準時間也與對準的快速性要求相矛盾。本文通過充分利用對準時間內(nèi)的采樣數(shù)據(jù)所包含的導航誤差信息,而非單純地增加對準時間,將對準用的采樣數(shù)據(jù)存儲起來,按時間順序進行正向和逆向排序后形成正向序列和逆向序列;然后利用抗擾動的慣性系對準算法對正向序列進行粗對準,得到誤差較小的粗對準結(jié)果;其次根據(jù)回溯參數(shù)辨識法對逆向序列和正向序列迭代進行對準,最終達到加快誤差參數(shù)收斂速度和提高航向角對準精度的目的。
1 慣性系粗對準
載體坐標系(b系)選擇前右下坐標系。導航坐標系(n系)為當?shù)氐乩碜鴺讼担疚闹袨闁|北天坐標系。慣性坐標系(ib0系)在粗對準開始時刻t0將b系在慣性空間凝固為ib0系,即。初始對準姿態(tài)矩陣為其中:
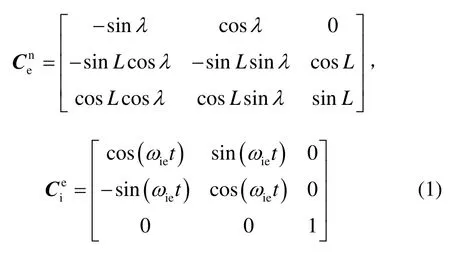
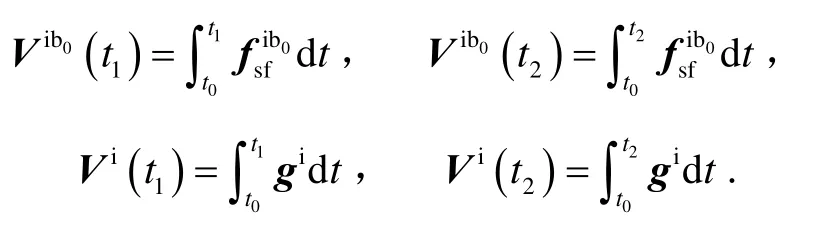
式中:L和λ分別為當?shù)氐木暥群徒?jīng)度,ωie為地球自轉(zhuǎn)角速率,t為對準時間。C利用陀螺的輸出利用等效旋轉(zhuǎn)矢量法進行實時更新,因此求解 C的核心問題轉(zhuǎn)換為 C的計算問題。取 t<t ≤ t <t ,其中t為012m0對準起始時刻,tm為對準結(jié)束時刻,計算得:
其中:
2 回溯參數(shù)辨識法精對準
2.1 正向?qū)Ш剿惴ń榻B
等效旋轉(zhuǎn)矢量微分方程的近似形式[10-11]為

式中:Φ為載體系從tk-1時刻到tk時刻角位置變化所對應(yīng)的等效旋轉(zhuǎn)矢量,ω為該時間段內(nèi)的旋轉(zhuǎn)角速率。
在靜基座或者晃動基座對準時,忽略圓錐誤差補償項,采用單子樣算法進行姿態(tài)解算,得:

其中:
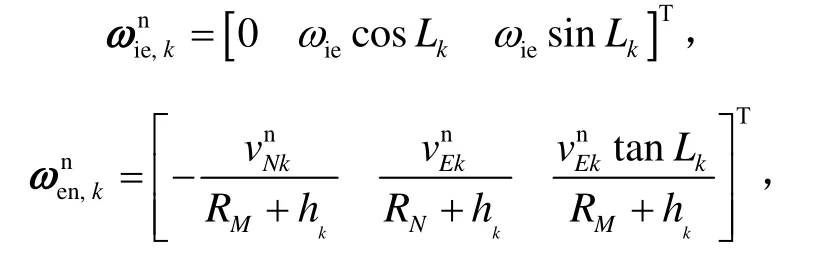
Ts= tk- tk-1為姿態(tài)更新周期。

速度微分方程為

求解得:

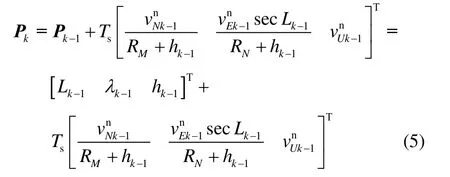
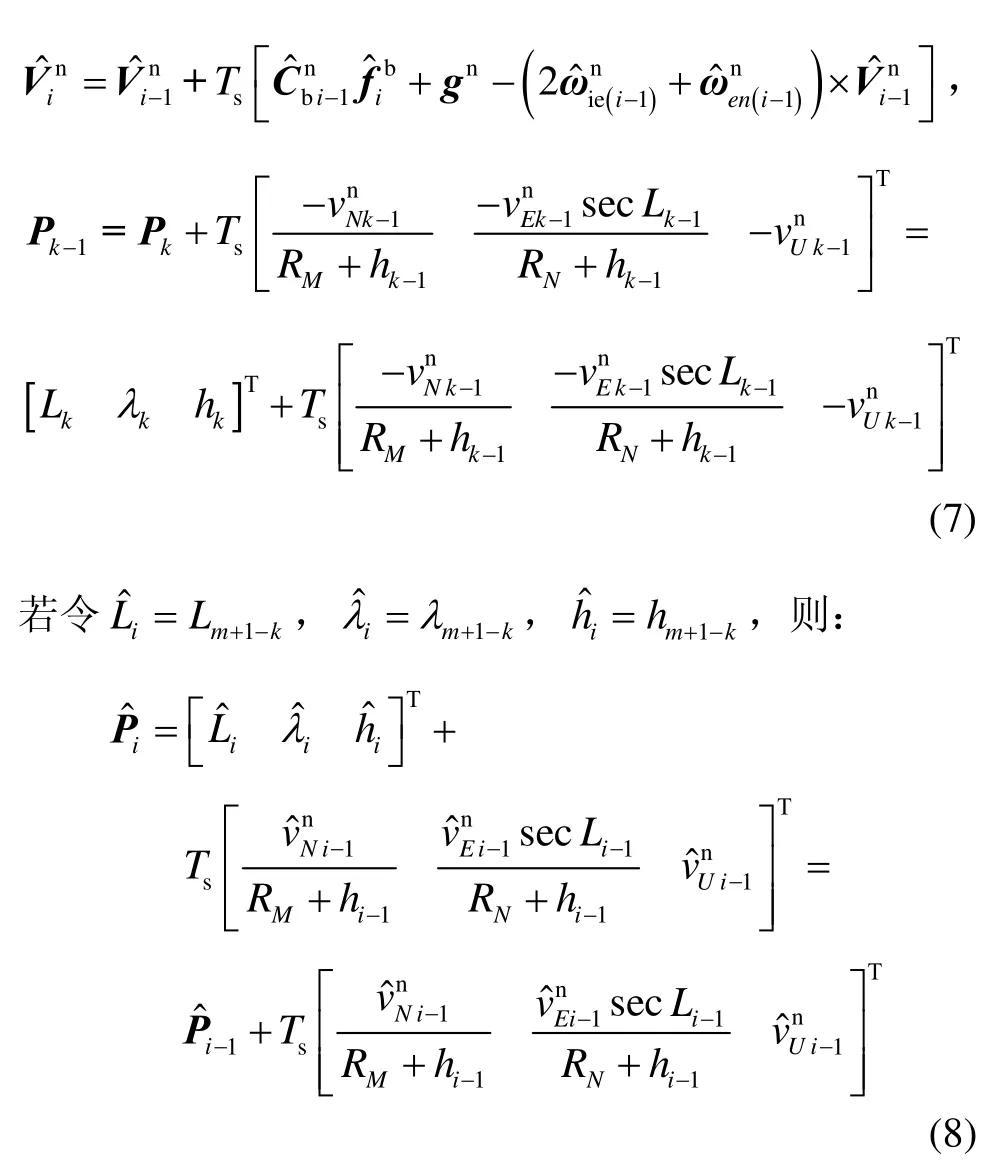
位置微分方程為

求解得:
2.2 逆向?qū)Ш剿惴ㄍ茖?/p>
若正向?qū)Ш介L度為m,如圖1所示。以m時刻的姿態(tài)、速度取反和位置作為逆向?qū)Ш降某跏甲藨B(tài)、初始速度和初始位置,將陀螺采樣和地球自轉(zhuǎn)角速率取反,并且對陀螺和加速度計的采樣數(shù)據(jù)進行逆序處理,形成逆向數(shù)據(jù)序列。
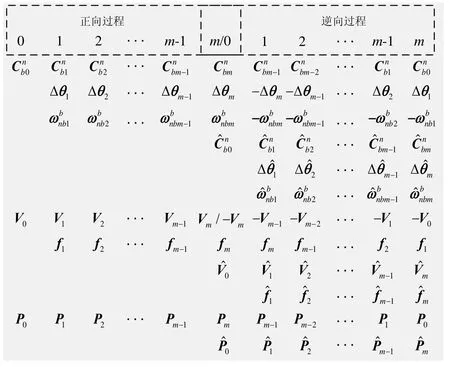
圖1 逆向?qū)Ш剿惴ㄔ韴DFig.1 Principle of negative-direction navigation algorithm
由公式(3)可以推導出,在逆向?qū)Ш竭^程中:

若不考慮計算誤差,逆向?qū)Ш綍r各時刻的姿態(tài)信息、位置信息與正向?qū)Ш皆趯?yīng)時刻上的姿態(tài)信息、位置信息相同,速度信息大小相同,方向相反。
由上述推導可知,正向?qū)Ш胶湍嫦驅(qū)Ш降慕馑愎较嗤虼似湎到y(tǒng)誤差方程也相同,逆向參數(shù)辨識法精對準的方程與正向參數(shù)辨識精對準的方程完全相同,僅對準過程中的導航信息不同。
2.3 回溯參數(shù)辨識法精對準
完成慣性系粗對準后,捷聯(lián)數(shù)學平臺的失準角φE、 φN、 φU均為小角度。考慮陀螺常值漂移ε和加速度計零偏▽,捷聯(lián)慣導系統(tǒng)的失準角誤差方程可以寫為[9]
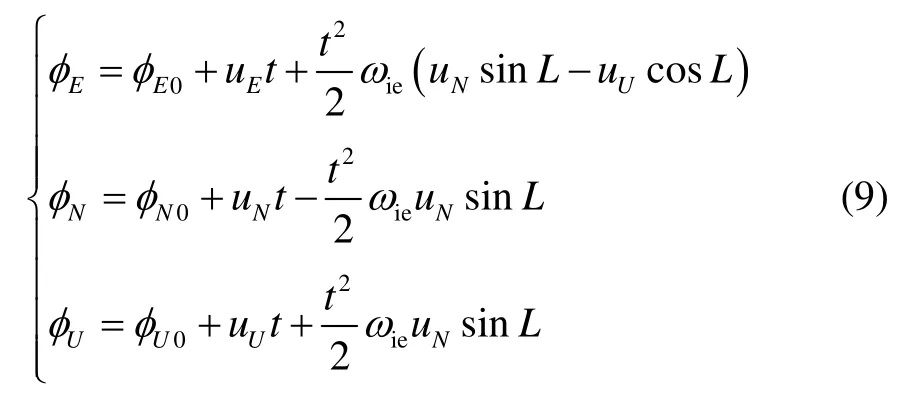
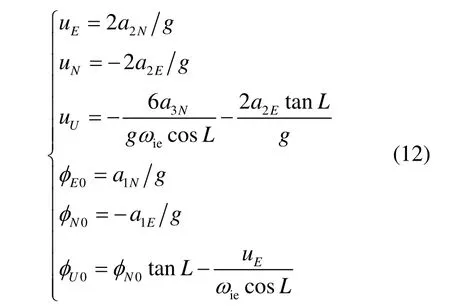
式中,uE、uN、uU為中間控制量:
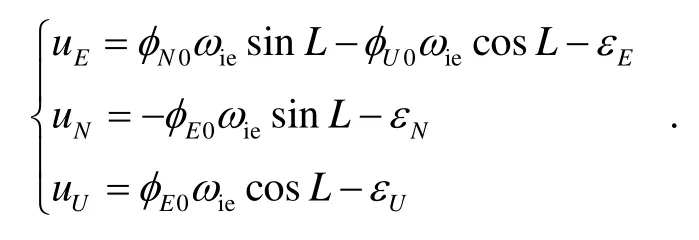
進一步,可求得水平速度誤差方程為
式中,VDE、VDN分別為對做簡諧波動的等效干擾加速度的積分,沒有隨時間增長的趨勢。可將式(8)改寫成:

式(11)中,Ts為采樣周期, a1E=▽E- gφN0、
速度誤差中辨識出,得:
由以上分析可以得出抗擾動的回溯參數(shù)辨識對準法的具體步驟如下:
Step 1. 先保存慣組從t0到tm時刻陀螺和加速度計的輸出,進行慣性系粗對準,得到逆向?qū)实某踔礐,開始進行回溯參數(shù)辨識法精對準;
Step 2. 以結(jié)束時刻tm為起始時刻,對陀螺和加速度計輸出數(shù)據(jù)進行逆序處理,以慣性系粗對準得到的姿態(tài)矩陣 C作為姿態(tài)矩陣的初值,根據(jù)逆向參數(shù)辨識法進行精對準,得到精對準后的姿態(tài)矩陣;
Step 4. 執(zhí)行Step 2和Step 3,即完成一次回溯參數(shù)辨識法精對準,可以反復(fù)進行多次,直到姿態(tài)矩陣解算得到的航向角逐漸收斂。
整個過程如圖2所示。
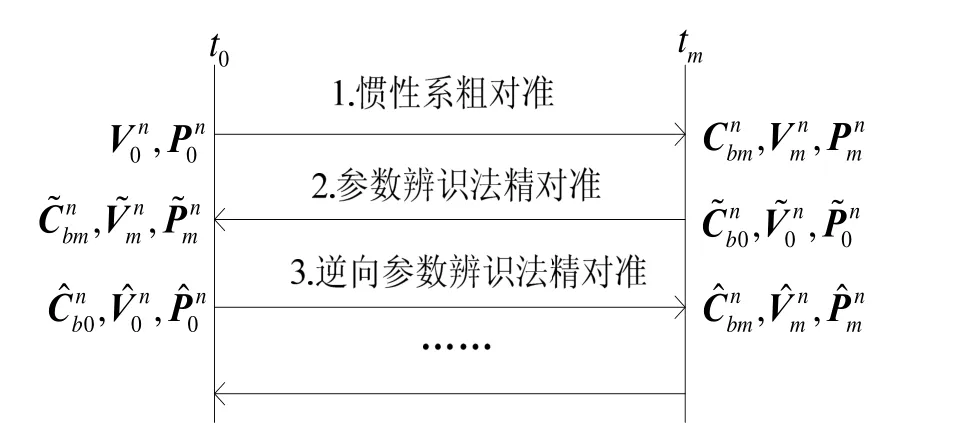
圖2 抗擾動回溯參數(shù)辨識對準法步驟Fig.2 Alignment approach of anti-interference backtracking parameter identification
3 實驗驗證
實驗選用航天十六所生產(chǎn)的某型激光捷聯(lián)慣組,激光陀螺儀等效漂移(3σ)為 0.003 (o)/h,加速度計等效零偏(3σ)為5×10-5g0,慣組固定于實驗車上,在不同的時間進行6次實驗。實驗車靜止于平坦路面上,發(fā)動機處于啟動狀態(tài),上電30 min后進行數(shù)據(jù)采集,期間人為進行開關(guān)車門及上下車的動作,采集 300 s數(shù)據(jù)后停止施加干擾并關(guān)閉發(fā)動機,再靜態(tài)采集300 s數(shù)據(jù)。實驗結(jié)束后用G2000型陀螺經(jīng)緯儀對激光捷聯(lián)慣組的航向角進行測量,作為航向角的真值。
分別采用抗擾動的回溯參數(shù)辨識法和文獻[9]中的參數(shù)辨識法對采樣數(shù)據(jù)進行對準,表1為利用不同方法進行對準的實驗結(jié)果,其中抗擾動回溯參數(shù)辨識法為對采樣數(shù)據(jù)進行一次回溯參數(shù)辨識精對準的結(jié)果。
由表1中可以看出,利用300 s的采樣數(shù)據(jù)進行對準,抗干擾回溯參數(shù)辨識法的對準誤差為參數(shù)辨識法誤差的25%,亦小于參數(shù)辨識法600 s的對準誤差。圖3~圖5為利抗擾動的回溯參數(shù)辨識法和用參數(shù)辨識法進行對準時的對準誤差,由圖中可以看出,抗擾動的回溯參數(shù)辨識法的對準誤差明顯小于參數(shù)辨識法。
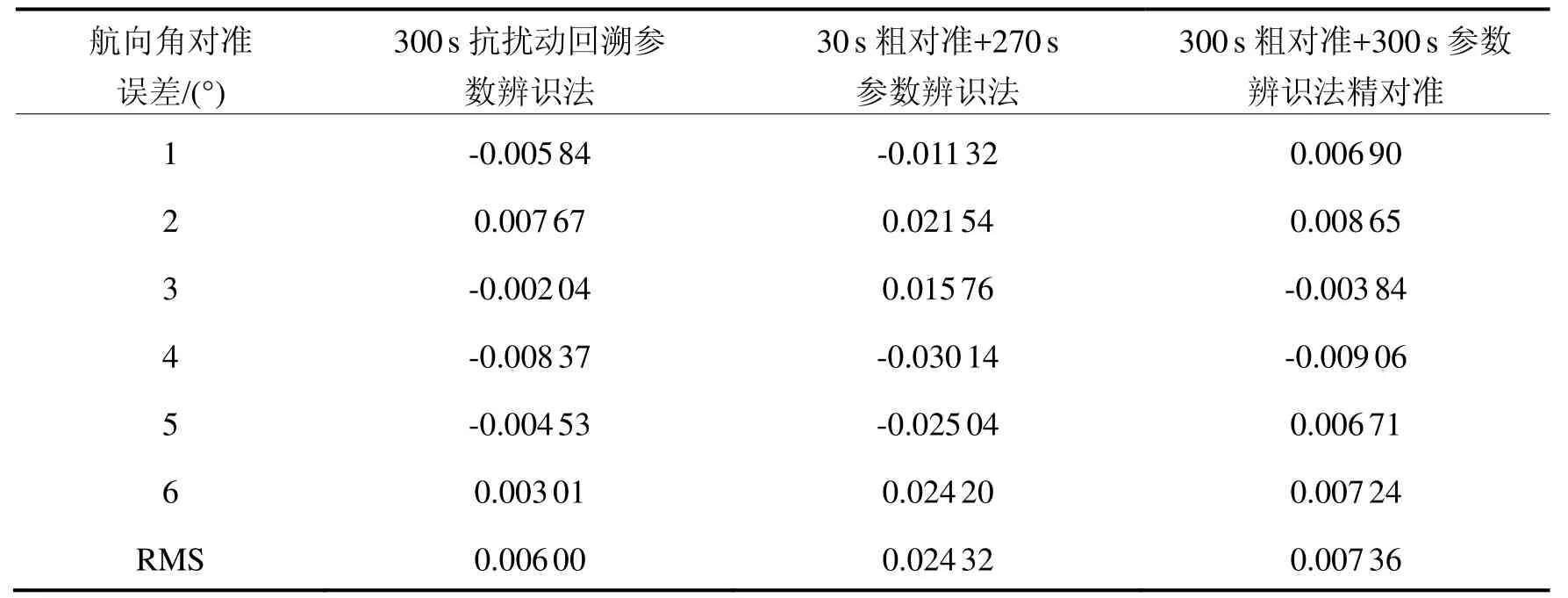
表1 三種對準方法的航向角對準誤差Tab.1 Azimuth alignment errors of three alignment algorithms
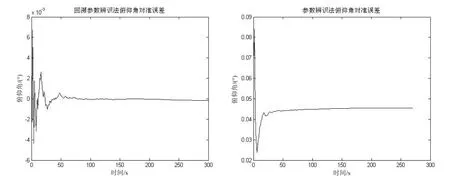
圖3 俯仰角誤差對比Fig.3 Comparison on pitch errors
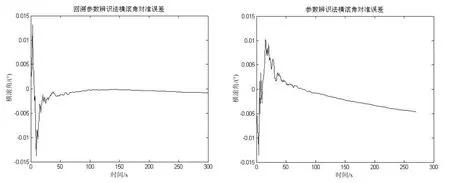
圖4 橫滾角誤差對比Fig.4 Comparison on roll errors
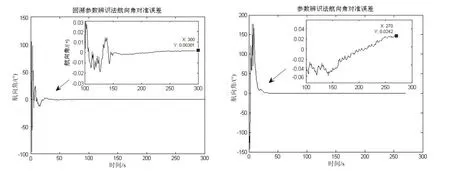
圖5 航向角誤差對比Fig.5 Comparison on azimuth errors
4 結(jié) 論
慣性系的粗對準能夠有效地隔離外界擾動對捷聯(lián)慣導系統(tǒng)初始對準的影響。因此,在有擾動的環(huán)境下,利用慣性系粗對準能夠為回溯參數(shù)辨識精對準提供較好的初始對準值。另外,粗對準的精度與對準時間有很大關(guān)系,在一定程度上,對準的時間越長,粗對準的精度越高。抗擾動的回溯參數(shù)辨識法將對準用的采樣數(shù)據(jù)按時間進行正向和逆向處理,可以將整個正向的時間序列用于粗對準,單向的參數(shù)辨識對準法僅能提供較短時間的采樣數(shù)據(jù)用于粗對準,因此,相對于單向的參數(shù)辨識對準法而言,回溯參數(shù)辨識法可以有效地提高粗對準的精度。
回溯參數(shù)辨識法的本質(zhì)是提高對準用的采樣數(shù)據(jù)的利用率,反復(fù)對采樣數(shù)據(jù)進行逆向和正向?qū)Ш剑缓罄脤Ш竭^程中產(chǎn)生的速度誤差去估計對準失準角。理論分析可得,經(jīng)過多次的回溯,初始對準可以達到極限精度。但是,根據(jù)實驗驗證,初始對準的精度并不總隨著回溯次數(shù)增加而提高,當回溯超過一定次數(shù)后,導航解算的速度誤差不再減小,而對準精度也就不再提高。因此,在實際的應(yīng)用過程中,可以根據(jù)捷聯(lián)慣導系統(tǒng)的性能進行有限次的回溯,以達到對準精度和計算復(fù)雜度的平衡。
本文中的方法不僅適用于靜基座對準,對于動基座或行進間對準,也有一定的參考價值,可以將引入的外界參考信息作為導航解算的真值,從導航誤差中辨識出初始對準的誤差。
(References):
[1] 付強文, 秦永元, 張金紅, 等. 捷聯(lián)慣導系統(tǒng)快速最小二乘精對準方法[J]. 中國慣性技術(shù)學報, 2012, 20(3): 278-282. Fu Qiang-wen, Qin Yong-yuan, Zhang Jin-hong, et al. Rapid recursive least-square fine alignment method for SINS[J]. Journal of Chinese Inertial Technology, 2012, 20(3): 278-282.
[2] Ma T, Gao Y. Application and comparison of two methods for alignment of FOG SINS[C]//2010 8th World Congress on Intelligent Control and Automation. IEEE, 2010: 3581-3584.
[3] Shang S T, Gao W S. Application of adaptive Kalman filter technique in initial alignment of single-axial rotation strap-down inertial navigation system[C]//Advanced Materials Research. 2012: 617-621.
[4] 劉永紅, 劉明雍, 謝波. 捷聯(lián)慣導系統(tǒng)雙位置快速抗干擾對準方法[J]. 中國慣性技術(shù)學報, 2014, 22(3): 296-300. Liu Yong-hong, Liu Ming-yong, Xie Bo. Rapid antiinterference method of two-position alignment of strapdown inertial navigation system[J]. Journal of Chinese Inertial Technology, 2014, 22(3): 296-300.
[5] Silson P M G. Coarse alignment of a ship's strapdown inertial attitude reference system using velocity loci[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(6): 1930-1941.
[6] 嚴恭敏. 捷聯(lián)慣導系統(tǒng)動基座初始對準及其它相關(guān)問題研究[D]. 西安: 西北工業(yè)大學, 2008. Yan Gong-min. On SINS in-movement initial alignment and some other problems[D]. Xi’an: Northwestern Polytechnical University, 2008.
[7] Song L, Zhang C, Lu J. Self-alignment of full skewed RSINS: observability analysis and full-observable Kalman filter[J]. Journal of Systems Engineering and Electronics, 2014, 25(1): 104-114.
[8] Ma L H, Wang K L, Li H. Gyrocompass alignment method of sins based on Kalman filtering pretreatment and dynamic gain adjustment on a rocking base[J]. Information Technology Journal, 2013, 12(4): 777-783.
[9] 秦永元. 慣性導航[M]. 第二版. 北京: 科學出版社, 2014: 325-328.
[10] Savage P G. Explicit frequency-shaped coning algorithms for pseudoconing environments[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(3): 774-782.
[11] Savage P G. Coning algorithm design by explicit frequency shaping[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(4): 1123-1132.
Anti-interference backtracking parameter identification alignment approach for strapdown inertial navigation system
ZHANG Zhao-fei1,2, LUO Jian-jun1,2, HOU Yong-li3
(1. School of Astronautics, Northwestern Polytechnical University, Xi’an 710072, China; 2. Science and Technology on Aerospace Flight Dynamics Laboratory, Xi’an 710072, China; 3. The 16th Institute, China Aerospace Science and Technology Corporation, Xi’an 710100, China)
Since the parameter identification alignment approach of strapdown inertial navigation system has such problems as the convergent time is long and the azimuth error is affected by the initial value of recursive calculation, an identification alignment algorithm for backtracking parameters is proposed by the consistency of the formulae, in which the positive and negative direction sequences are obtained by storing and processing the alignment data of gyros and accelerometers. Based on the anti-interference coarse alignment in inertial reference frame, the negative and positive direction identification alignment is used repeatedly in the fine alignment algorithm of backtracking parameter identification alignment. Experiment results confirm that, by the new alignment algorithm, the azimuth error can be reduced by 75% without increasing alignment time.
strapdown inertial navigation system; anti-interference; backtracking; parameter identification alignment
V249.3
:A
2015-07-10;
:2015-11-11
國家自然科學基金(61004124)
張朝飛(1987—),男,博士研究生,從事捷聯(lián)慣導研究。E-mail: fly060fly@qq.com
聯(lián) 系 人:羅建軍(1965—),男,教授,博士生導師。E-mail: jjluo@nwpu.edu.cn
1005-6734(2015)06-0733-06
10.13695/j.cnki.12-1222/o3.2015.06.007
