永磁直驅風力發電機側變流器控制的研究
2015-09-11 22:30:36徐清彬徐斯銳周芝峰
科技與創新 2015年18期
關鍵詞:永磁同步電機
徐清彬++徐斯銳++周芝峰
摘 要:由于直接轉矩控制省去了復雜的坐標轉換及解耦運算,可直接控制轉矩,所以,其動態響應速度比矢量控制快。因此,將其應用在永磁直驅風力發電系統中,對風機快速跟蹤、捕獲風能具有重要意義——可增強風力發電機快速響應的能力。基于MATLAB/Simulink平臺進行了直接轉矩控制方案仿真研究,結果表明,機側變流器采用直接轉矩控制的響應速度比較理想。
關鍵詞:永磁同步電機;直接轉矩控制;機側變流器;風力發電機
中圖分類號:TM315 文獻標識碼:A DOI:10.15913/j.cnki.kjycx.2015.18.005
在能源緊缺和環保呼聲日益強烈的今天,新能源發電受到了世界各國的重視,而風能作為清潔的可再生資源,自然引起了人們的關注,進入21世紀后,風力發電更是得到了長足的發展。隨著電力電子技術的快速發展,基于效率、可靠性、經濟性等因素的考慮,風力發電技術由傳統的恒速恒頻演進到了現在的變速恒頻。
目前,變速恒頻風力發電技術主要有雙饋異步風力發電和永磁直驅風力發電兩種典型方案。其中,雙饋異步風力發電技術較為成熟,但永磁直驅型省去了齒輪箱環節,其可靠性和效率比雙饋異步型高,且易實現對有功/無功的控制和滿足輸出諧波低的要求。此外,隨著電力電子技術的發展和高性能永磁材料的出現,永磁同步電機的價格越來越低、體積越來越小、性能越來越高,因此,永磁直驅風力發電技術成為當前風力發電的發展趨勢之一。
在永磁直驅風力發電系統中,機側變流器的主要作用是整流,其常用結構有不控制整流、不控整流+Boost升壓、相控整流和四象限整流。由于機側變流器采用四象限整流時的功率可雙向流動且控制比較靈活,所以,本文對雙PWM型變流器的永磁直驅風力發電系統進行了研究,重點分析了機側變流器的控制。為了提高風機的快速響應能力,引進了直接轉矩控制技術控制永磁同步發電機,與傳統的矢量控制進行了比較,并用MATLAB/Simulink進行了仿真驗證和對比。
1 永磁同步發電機的數學模型
永磁同步發電機(Permanent Magnet Synchronous Generator,簡稱“PMSG”)不需要裝備勵磁繞組,比傳統的電勵磁繞組體積小,且結構簡單,未安裝集電環和電刷,可靠性有所提高。在建立數學模型前,要做以下假設:忽略鐵芯的飽和;不計渦流和磁滯損耗;轉子勵磁磁場和電樞反應磁場在氣隙中均呈正弦分布。基于以上假設,下面分別在三相靜止(ABC)坐標系、兩相靜止(αβ)坐標系下建立三相永磁同步發電機的數學模型。
1.1 三相靜止坐標系下的模型
三相靜止坐標系下PMSG的定子電壓空間矢量方程為:
. (1)
式(1)中:us為定子電壓矢量;is為定子電流矢量;Rs為定子相電阻;Ls為定子繞組的自感;ψf為轉子磁鏈;θe為電角度。
定子電壓回路方程為:
. (2)
式(2)中:uA,uB,uC為定子各相繞組的電壓;iA,iB,iC為定子各相繞組的電流;eA,eB,eC為各相繞組的感應電動勢;
Lm為各相繞組的互感;p為微分算子。其中, 的計算方法為:
. (3)
式(3)中:ωe為電角速度。
1.2 兩相靜止坐標系下的模型
將電機的定子放在αβ坐標系下,并將α軸定在A相繞組軸線上,用兩相正交繞組等效代替原來的三相繞組,這樣可簡化數學模型。經Clarke變換后的定子電壓方程為:
. (4)
式(4)中:uα和uβ為兩相靜止坐標系下定子電壓α和β的軸分量;iα和iβ為兩相靜止坐標系下定子電流α和β的軸分量;Lα和Lβ為兩相靜止坐標系下電感α和β的軸分量,3Ls/2.
2 直接轉矩控制的原理
直接轉矩控制(Direct Torque Control,簡稱“DTC”)最先由德國魯爾大學的Depenbrock教授在1985年提出。該技術放棄了解耦的思想,采用定子磁場定向,直接控制電機的轉矩和定子磁鏈,根據轉矩和定子磁鏈的變化和定子磁鏈所在的扇區選擇電壓空間矢量,其控制系統框圖如圖1所示。該控制技術中沒有坐標轉換,結構得到了簡化,且擺脫了轉子參數變化的影響,具有較高的魯棒性,在很大程度上解決了矢量控制技術動態響應較慢的問題。
圖1 直接轉矩控制框圖
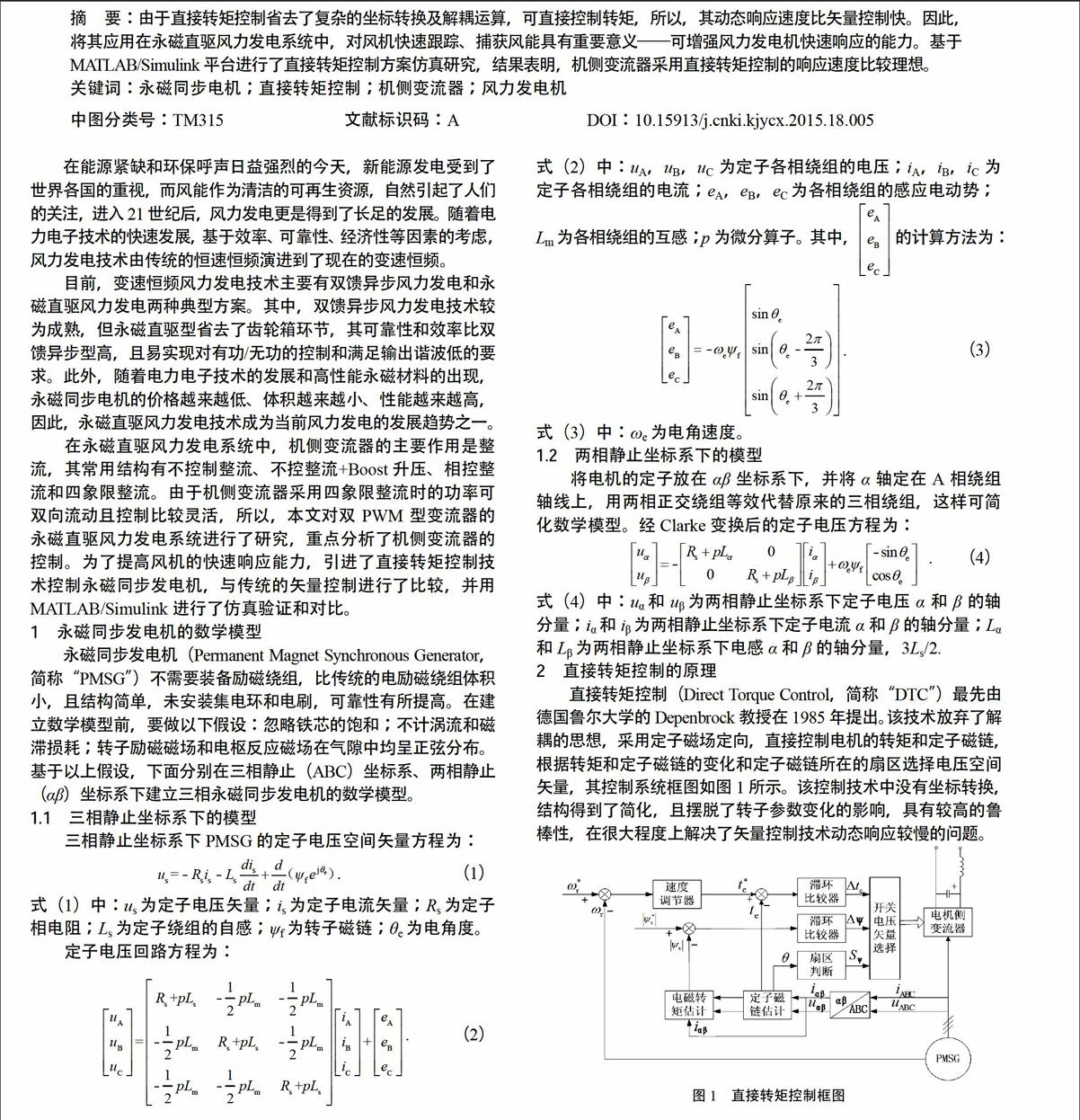
2.1 轉矩的生成和控制
面裝式PMSG的定子電流和磁鏈矢量如圖2所示,在PMSG中存在3個磁場:由永磁體產生的轉子磁場ψf、由電流矢量產生的電樞磁場Lsis和由兩者合成的定子磁場ψs。電磁轉矩可看成是轉子磁場ψf和定子磁場ψs相互作用的結果,即:
. (5)
轉換為標量式:
. (6)
轉子磁鏈矢量ψf的幅值保持不變,如果能控制定子磁鏈矢量ψs為常值,則電磁轉矩就僅與δsf有關,進而通過控制δsf可控制電磁轉矩。
在坐標系ABC中,如果忽略定子電阻的影響,則us=dψs/dt.在△t內,矢量ψs的增量△ψs等于us×△t,△ψs與us的方向相同,可近似表示為△ψs=us△t,則定子磁鏈矢量為:
ψs=|ψs|ejρs. (7)
式(7)中: ;ωs為ψs的旋轉速度。則:
. (8)
式(8)中:usr=d|ψs|/dt;usn=ωs|ψs|.
可用外加電壓us控制ψs,用其徑向分量控制ψs幅值的變化,用其切向分量控制ψs的轉速ωs。
2.2 磁鏈和轉矩的預估
PMSG的定子磁鏈矢量可由定子電壓矢量和定子電流矢量預估:
. (9)
ψs的幅值和相角可由其在定子坐標系αβ的2個分量uα和uβ確定,即:
. (10)
則:
. (11)
則:
. (12)
因此,轉矩的估算公式為:
. (13)
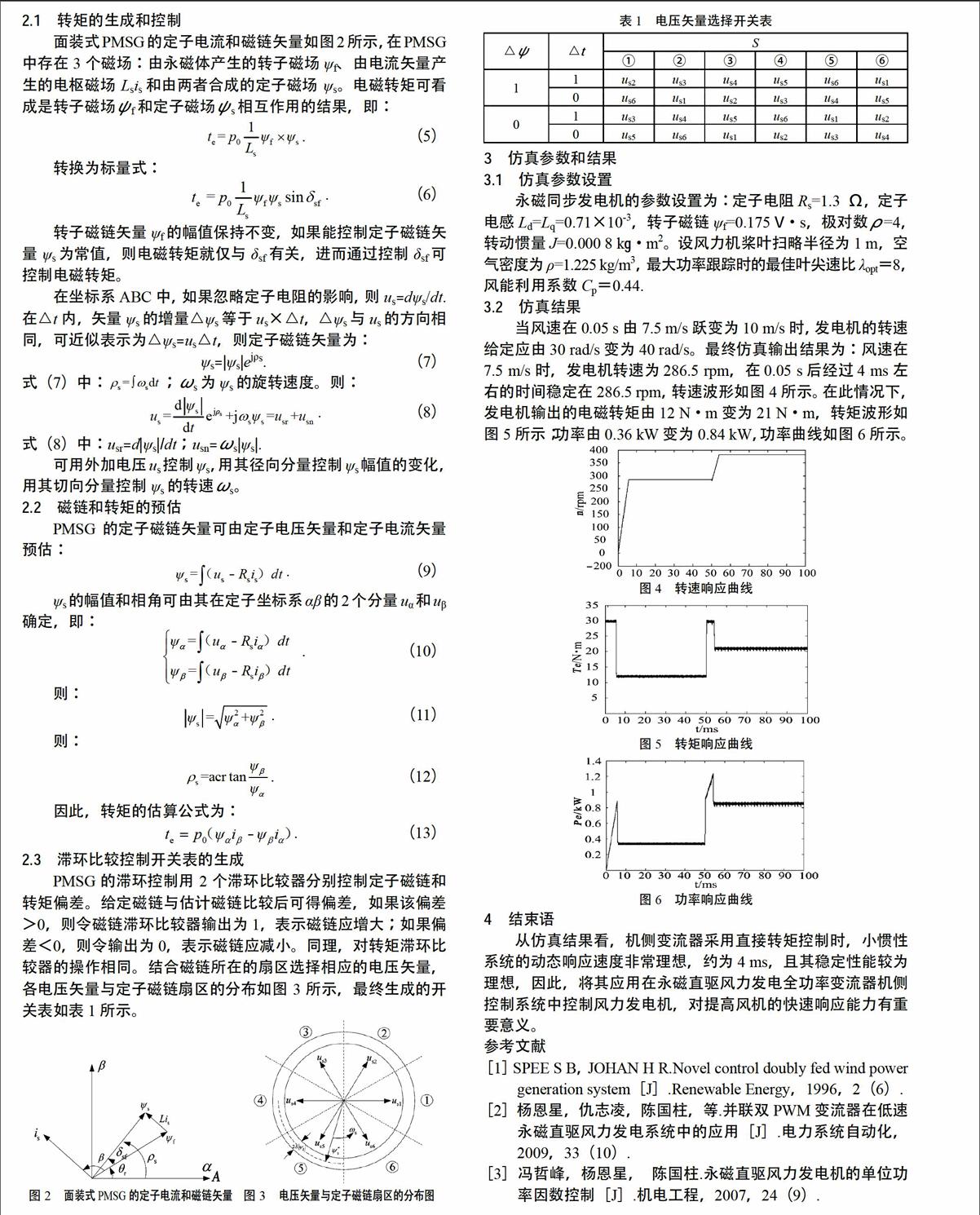
2.3 滯環比較控制開關表的生成
PMSG的滯環控制用2個滯環比較器分別控制定子磁鏈和轉矩偏差。給定磁鏈與估計磁鏈比較后可得偏差,如果該偏差>0,則令磁鏈滯環比較器輸出為1,表示磁鏈應增大;如果偏差<0,則令輸出為0,表示磁鏈應減小。同理,對轉矩滯環比較器的操作相同。結合磁鏈所在的扇區選擇相應的電壓矢量,各電壓矢量與定子磁鏈扇區的分布如圖3所示,最終生成的開關表如表1所示。
圖2 面裝式PMSG的定子電流和磁鏈矢量 圖3 電壓矢量與定子磁鏈扇區的分布圖
表1 電壓矢量選擇開關表
△ψ △t S
① ② ③ ④ ⑤ ⑥
1 1 us2 us3 us4 us5 us6 us1
0 us6 us1 us2 us3 us4 us5
0 1 us3 us4 us5 us6 us1 us2
0 us5 us6 us1 us2 us3 us4
3 仿真參數和結果
3.1 仿真參數設置
永磁同步發電機的參數設置為:定子電阻Rs=1.3 Ω,定子電感Ld=Lq=0.71×10-3,轉子磁鏈ψf=0.175 V·s,極對數ρ=4,轉動慣量J=0.000 8 kg·m2。設風力機槳葉掃略半徑為1 m,空氣密度為ρ=1.225 kg/m3,最大功率跟蹤時的最佳葉尖速比λopt=8,風能利用系數Cp=0.44.
3.2 仿真結果
當風速在0.05 s由7.5 m/s躍變為10 m/s時,發電機的轉速給定應由30 rad/s變為40 rad/s。最終仿真輸出結果為:風速在7.5 m/s時,發電機轉速為286.5 rpm,在0.05 s后經過4 ms左右的時間穩定在286.5 rpm,轉速波形如圖4所示。在此情況下,發電機輸出的電磁轉矩由12 N·m變為21 N·m,轉矩波形如圖5所示;功率由0.36 kW變為0.84 kW,功率曲線如圖6所示。
圖4 轉速響應曲線
圖5 轉矩響應曲線
圖6 功率響應曲線
4 結束語
從仿真結果看,機側變流器采用直接轉矩控制時,小慣性系統的動態響應速度非常理想,約為4 ms,且其穩定性能較為理想,因此,將其應用在永磁直驅風力發電全功率變流器機側控制系統中控制風力發電機,對提高風機的快速響應能力有重要意義。
參考文獻
[1]SPEE S B,JOHAN H R.Novel control doubly fed wind power generation system[J].Renewable Energy,1996,2(6).
[2]楊恩星,仇志凌,陳國柱,等.并聯雙PWM變流器在低速永磁直驅風力發電系統中的應用[J].電力系統自動化,2009,33(10).
[3]馮哲峰,楊恩星, 陳國柱.永磁直驅風力發電機的單位功率因數控制[J].機電工程,2007,24(9).
文章編號:2095-6835(2015)18-0007-02
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49