內河船舶智能航行系統設計與實現*
2015-10-15 05:38:41大連海事大學航海學院王起超王笑琳馬春超周斌斌
世界海運 2015年6期
大連海事大學航海學院 王起超 王笑琳 馬春超 周斌斌
內河船舶智能航行系統設計與實現*
大連海事大學航海學院 王起超 王笑琳 馬春超 周斌斌
為進一步提高內河船舶的智能化和信息化水平,定義面向內河的船舶智能航行系統的概念,提出智能航行系統的框架結構。根據船舶通導設備及岸基云服務平臺提供的信息支撐,設計12種智能預報警的類型、語音服務內容和圖標,介紹偏航及橋區等智能預報警的算法流程,并最終展示 語音、警報燈和圖標3種形式的智能預報警顯示效果。該系統可實現船舶航行全過程中的智能預報警功能。
智能航行系統;智能預報警;內河船舶;語音服務內容;圖標設計
黨和國家高度重視內河航運的發展,2014年7月16日,國務院發布《關于珠江—西江經濟帶發展規劃的批復》,原則同意珠江—西江經濟帶發展規劃,這意味著珠江—西江經濟帶發展正式上升為國家戰略[1]。2011年1月,國務院提出要用10年左右的時間,建成暢通、高效、平安、綠色的現代化內河水運體系。要建設現代化內河航運體系,首先應解決安全問題。內河航行環境復雜多變,橋梁林立、河道彎曲、渡口眾多、水位漲落不定等[2],給船舶的安全航行帶來很大的困擾,低智能化的船舶導航系統已不能適應內河航運的發展。
一、智能航行系統基本概念
智能航行系統是利用通導設備自動地感知并獲取各種航行相關信息,并能實時地接受岸基云服務平臺提供的各種信息,通過數據的運算與處理,為船舶駕駛員不斷地提供各種預報警支持,以實現內河船舶安全航行的系統,系統總體結構見圖1。
在信息采集模塊中,一方面,船舶通導設備應用VTS、AIS、RFID、CCTV、北斗衛星等技術手段,形成多方位立體化的航運要素信息感知體系,實現船舶對助航設施、礙航物等航行環境的智能感知;另一方面,將先進的船岸一體化系統技術、通信技術、云計算等技術綜合運用于岸基云服務平臺,通過對交通設施、信息資源的實時采集、挖掘和處理,為智能預報警算法模塊提供實時動態的信息支撐,提高船舶航行的安全和效率,岸基云服務平臺功能流程見圖2。
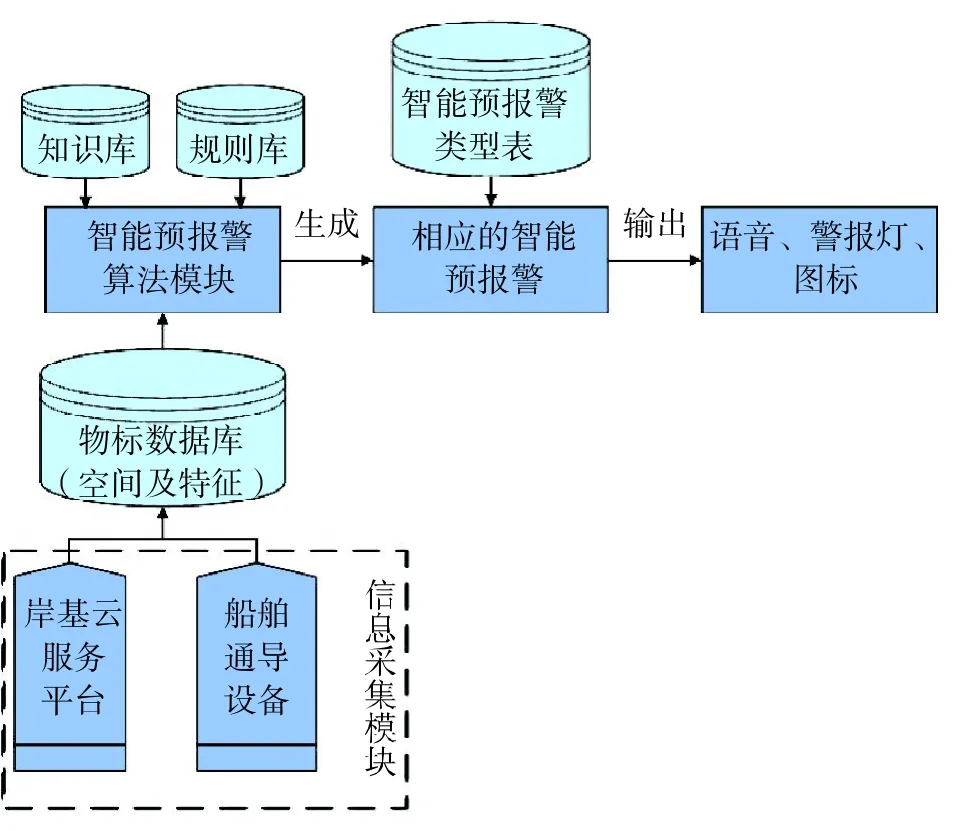
圖1 系統總體結構
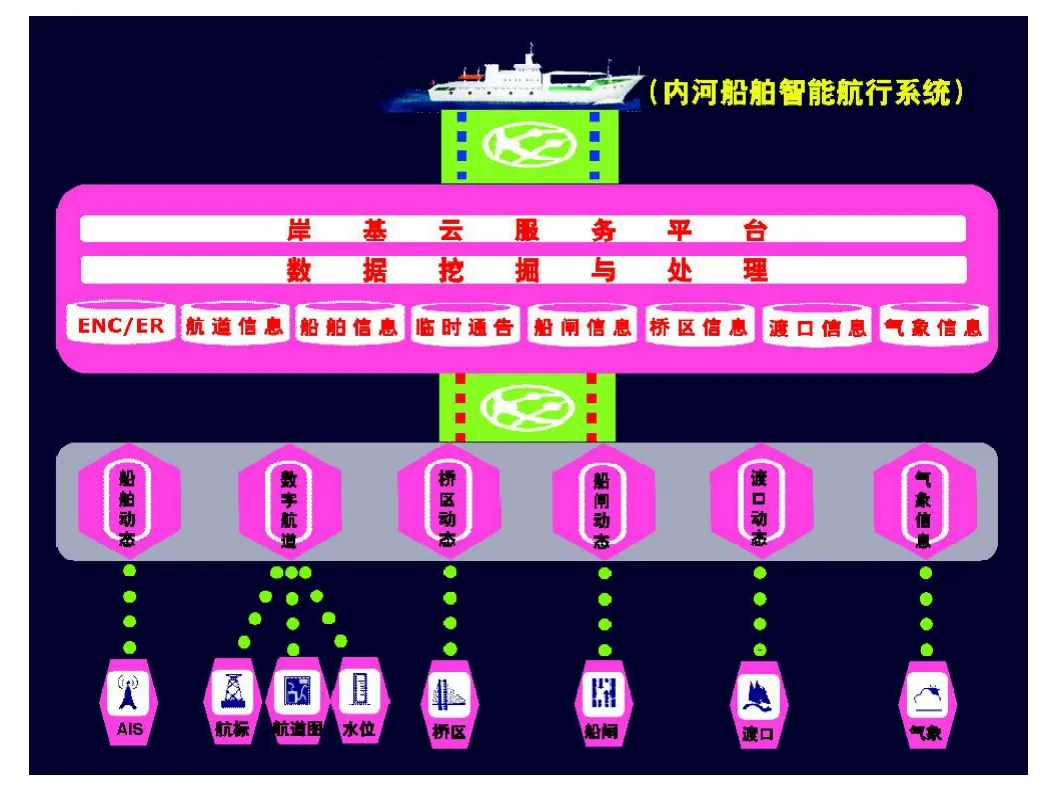
圖2 岸基云服務平臺功能流程
知識庫是由一般的基礎理論和原理(如航海學、輪機工程、人工智能、計算機科學、數據庫及數據結構、大地測量學、地理信息系統等)以及直接和間接經驗構成,它是判定預報警類別的理論基礎。
規則庫主要是指《內河避碰規則》。為加強我國內河交通管理,維護船舶航行秩序,保障人民生命財產的安全,促進水運事業的發展,實現交通運輸現代化,交通運輸部制定了《內河避碰規則》。在中華人民共和國境內江河、湖泊、水庫、運河等通航水域及其港口航行、停泊和作業的一切船舶、排筏均應當遵守本規則[3]。
物標數據庫(空間及特征)主要用于存儲信息采集模塊提供的物標數據,這些物標是實現智能預報警的重要依據,分為三種類型:在電子航道圖中,各種航標、沉船/暗礁等水下危險物、臺風是以“點物標”的形式存在的;橋區、渡口、淺水區等區域的預警線是以“線物標”的形式存在的;而施工作業區/軍事演習區、橋區、渡口、危險區、航道等區域的報警面是以“面物標”的形式存在的。
二、智能預報警的類型、語音服務內容及圖標集
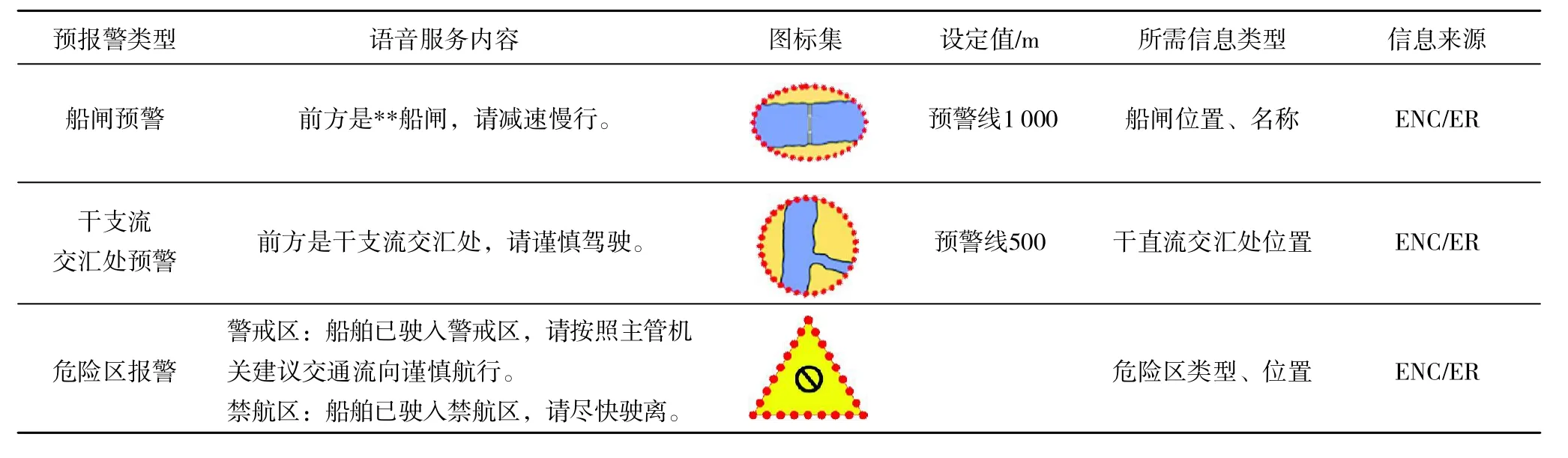
首先建立12種內河船舶智能預報警類型,并結合內河的交通特點,設計了相應的語音服務內容及圖標集,具體內容如表1所示。

表1 智能預報警類型表
續表
三、智能預報警算法設計
智能預報警算法模塊由多個算法組成,以偏航報警算法及橋區預報警算法為例進行介紹。
(一)偏航報警算法
為了充分利用內河航道和減少船舶會遇幾率,航道采用分道通航制,所以將可航的深水安全航道分為上行區域和下行區域,船舶航行時嚴格按照上行和下行規定,在相應的區域航行[4]。把上行和下行區域的所有航道面物標組成一個航道面物標集合,用于查詢、對比船舶的航向,以判斷船舶是否偏離航道或駛入反向航道。以西江為例,將起始港和目的港之間的內河深水航道上行和下行區域分成若干個航道面物標,如圖3所示。根據S-57數據標準,這些航道面物標有如下屬性[5]:
名稱:深水航道部分;物標類:DWRTPT[41]
屬性:狀況STATUS 屬性值:14(公共的) 區別于顯示類
交通流TRAFIC 屬性值:【1】上行 【2】下行
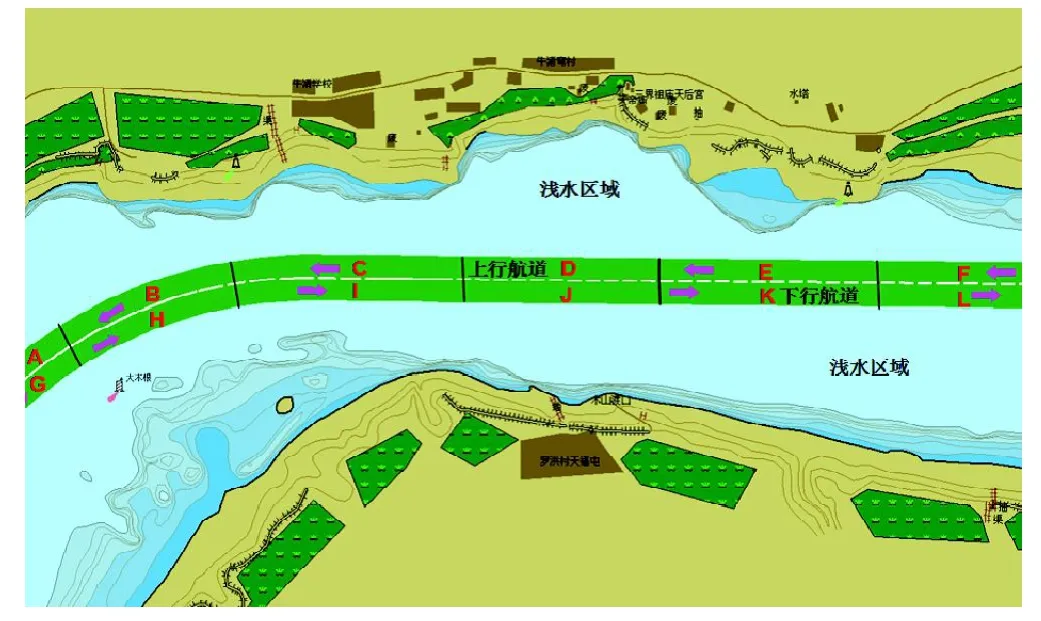
圖3 航道數據組織示意圖
當船舶航行時,遍歷所航行區域的航道面物標,獲取航道面物標集合。如果航道面物標集合為空,則表明船舶已經偏離深水航道,進入淺水危險區域,進行“偏離航道報警”。如果航道面物標集合不為空,則獲取航道面物標的交通流屬性,與船舶的航行方向進行比較,如果取值一致,則表明船舶航行于正確的航道上,不進行報警;如果航道面物標的交通流屬性與船舶航向不一致,則表明船舶已經偏航到反向航道上,進行“反向航道報警”。對于偏航到淺水區域或駛入反向航道的船舶,智能航行系統應發出聲音報警,并在屏幕上顯示報警圖標,提醒駕駛員采取相應的措施,以避免事故發生,具體報警算法流程見圖4。

圖4 偏航報警算法流程圖
(二)橋區預報警算法
在電子航道圖中,增加預警線物標和報警面物標數據,以實現橋區預報警功能。以廣西貴港郁江大橋為例,如圖5所示,以橋墩連線為中心線,在橋梁的兩側各設置一個預警線物標和一個報警面物標,其中,紅色的區域標志為上行區域,而黃色的區域標志為下行區域。根據S-57數據標準,預警線物標和報警面物標具有其自身獨特的屬性,便于區分物標,具體屬性如下[5]:
1. 報警面物標
名稱:橋區航道;物標類:FAIRWY[51]
屬性:狀況STATUS 屬性值:9(強制性的) 區別于顯示類
交通流TRAFIC 屬性值:【1】上行 【2】下行
2. 預警線物標
名稱:距離標志;物標類:DISMAR[44]
屬性:距離標志類CATDIS 屬性值:2(桿形可視標志)
交通流TRAFIC 屬性值:【1】上行 【2】下行
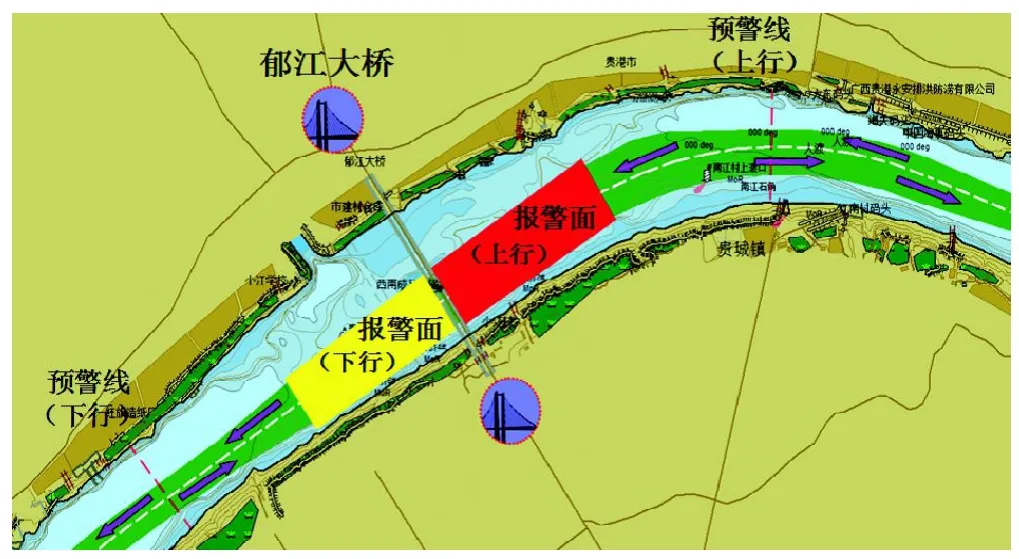
圖5 橋區數據組織示意圖
船舶航行過程中,判斷船舶與橋梁的距離是否小于預警設定值,如果距離大于預警設定值,則沒有危險;否則,則判斷船舶航向與橋區預警線物標的交通流是否一致。如果不一致,說明船舶已駛離橋區,不需要進行預報警;如果一致,則把船舶看成一點,遍歷包含船舶所在位置的所有面物標,獲取面物標集合。根據面物標的屬性判斷面物標集合中是否包含橋區報警面物標,如果不包含,智能航行系統則進行橋區預警,提醒駕駛員前方有大橋;如果包含,就進行橋區報警,發出聲音報警信號,提醒駕駛員謹慎駕駛,避免發生撞橋事故,具體報警算法流程見圖6。
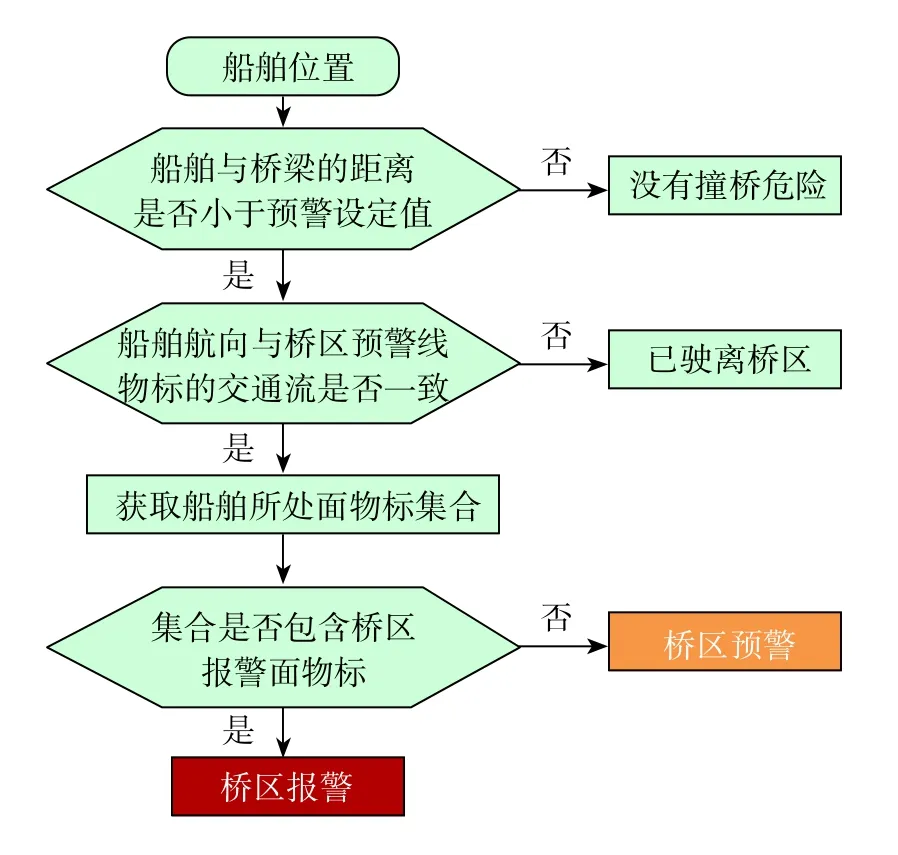
圖6 橋區預報警算法流程圖
四、智能航行系統的實現
利用數據庫管理系統Structured Query Language(SQL)Server 2005、軟件開發工具Visual C++,初步實現西江航運干線南寧至貴港航段(總長度273.0 km)的智能航行系統的開發,利用船舶自身通導設備和岸基云服務平臺來感知獲取航行相關信息,通過數據的運算與處理,為船舶駕駛員不斷地提供各種預報警支持,以實現內河船舶安全航行,航標異常報警、船閘預警及渡口區報警的運行界面如圖7所示。
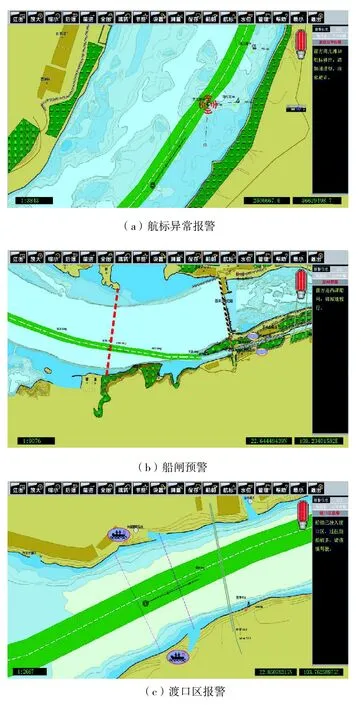
圖7 系統運行界面
應用智能航行系統可以更好地對內河水域進行實時監控,通過為船舶駕駛員不斷地提供各種預報警支持,及時對內河水域的水上交通事故進行預判斷,具有實際應用價值。
[1]編輯部.《珠江—西江經濟帶發展規劃》獲批跨省區流域經濟合作開啟新模式[J].財經界,2014(8):94-96.
[2]程細得.內河船舶操縱及避碰決策優化研究[D].武漢:武漢理工大學,2007.
[3]丁繼民,楊建國.船舶避碰與信號[M].大連:大連海事大學出版社,2010.
[4]陳瑩.長江智能航運系統網絡及通信協議的設計與實現[D].大連:大連海事大學,2008.
[5]周程熹,趙德鵬,周曾磐,等.IHO數字海道測量數據傳輸標準(S-57篇)[M].大連:大連海事大學出版社,1999.
交通運輸部長江黃金水道綜合信息服務關鍵技術研究(802070);中央高校基本科研業務費專項資金資助項目(3132014309)
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
表面工程與再制造(2019年6期)2019-08-24 06:40:04
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46