烏東德水電站雙向門機大車同步與定位控制技術
2015-10-30 07:20:36覃建青王孝魯
制造業自動化 2015年10期
關鍵詞:變頻器
覃建青,王孝魯
(中國葛洲壩集團 機械船舶有限公司,宜昌 440007)
1 項目背景
烏東德水電站壩址所處河段的右岸隸屬云南省祿勸縣,左岸隸屬四川省會東縣。烏東德水電站開發任務以發電為主,兼顧防洪;電站建成后可發展庫區航運,具有改善下游河段通航條件和攔沙等作用。水庫正常蓄水位975.0m,設計洪水位979.38m,校核洪水位986.17m,水庫總庫容74.08億m3,電站裝機容量10200MW。兩岸靠河側各布置6臺單機容量為850MW的機組,電站廠房采用左、右岸各布置6臺機組的首(中)部式地下廠房。
發電機組引水系統采用單機單洞,左岸布置2條低導流洞,右岸布置2條低導流洞,4條低導流隧洞的出口和電站尾水洞相結合,電站尾水檢修門兼作4條低導流隧洞封堵時的隧洞出口擋水門。其中左岸電站尾水2×2000kN(單向)門式啟閉機1臺,軌道及附件1套,液壓自動掛脫梁1套。右岸電站尾水2×2000kN(雙向)門式啟閉機1臺,軌道及附件1套,液壓自動掛脫梁1套。本文以右岸門機為例,根據雙向門機的工藝特點和技術要求,闡述了西門子變頻器在雙向門機應用的方案,主要說明了大車同步與定位控制技術。
圖1 烏東德水電站效果圖
2 工藝介紹
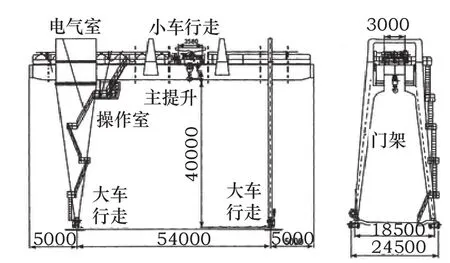
圖2 雙向門機結構圖
雙向門式啟閉機簡稱門機,安裝在水電站的壩頂,用來啟閉泄洪閘門,控制閘門進行泄洪,調節水庫區內正常水位,保護大壩樞紐和水電站安全運行。門機主要有駕駛室、電氣室、大車運行機構、小車、門架、電纜卷筒、大車夾軌器等組成。其中小車由起升機構、小車架、卷筒裝置、電動機、制動器、減速器、集中潤滑系統、液壓掛脫梁電纜收放機構、小車運行機構、小車機房罩、機房內檢修吊、電力拖動和控制設備等組成。其中大車運行機構由電動機、制動器、減速器、集中潤滑系統、臺車架和車輪組、電力拖動和控制設備等組成。雙向門機通過大車行走機構沿著壩頂鋪設的軌道行走至閘門位置,閘門通過液壓自動掛拖梁在主起升機構帶動下啟閉,主起升機構可以通過小車行走機構沿著橫梁行走,主提升機構可以通過小車行走機構沿著橫梁行走使得雙向門機區別于單向門機。

圖3 烏東德雙向門機

圖4 雙向門機大車
3 控制要求
大車運行機構、小車運行機構、起升機構不同時工作。大車最大連續運行距離133.3m,運行速度范圍為2m/min~20m/min,滿載恒轉矩調速范圍1:10,啟制動加速度≤0.1m/s2,大車兩側分別驅動并能實現電氣同步。大車運行能自動對位(對位閘門孔口中心線和閘門門庫中心線),并且可運行到設定位置(可調整的6個位置)自動停車。
4 系統方案
本項目為2×2000kN雙向門機控制系統。上位機采用10寸MP277觸摸屏,安裝在司機室的操作臺上。控制器采用S7-300西門子可編程序控制器,安裝在電氣室的電氣柜內,ET200M負責采集司機室的控制信號,安裝在司機室的操作臺內。主提升卷揚由兩臺160kW的S120變頻器驅動,采用帶傳感器矢量控制方式;大車行走機構由相同的四套行走裝置組成,兩臺45kW G120變頻器分別各驅動4臺電機,采用V/F控制方式。小車行走機構由相同的兩套行走裝置組成,一臺5.5kW G120變頻器驅動2臺電機,采用V/F控制方式。變頻器均安裝在電氣室的電氣柜內。
1)系統配置
S7-300PLC站:
CPU313C-2DP
訂貨號6ES7313-6CG04-0AB0 版本 V3.3 數量1
DI16*DC24V
訂貨號6ES7321-1BH02-0AA0 數量4
DO16*DC24V/0.5A
訂貨號6ES7322-1BH01-0AA0 數量1
AI8*12Bit
訂貨號6ES7331-7KF02-0AB0 數量1
SM338 POS-Input
訂貨號6ES7338-4CB01-0AB0 版本V2.0 數量1
ET200M站:
IM153-1
訂貨號6ES7153-1AA03-0XB0 數量1
DI16*DC24V
訂貨號6ES7321-1BH02-0AA0 數量3
DO16*DC24V/0.5A
訂貨號6ES7322-1BH01-0AA0 數量1
觸摸屏:
MP277
訂貨號6AV6643-0CD01-1AX1 數量1
主提升:
CU320-2DP
訂貨號6SL3040-1MA01-0AA0 CF卡V4.5 數量1
SLM 355KW
訂貨號6SL3330-6TE37-3AA3 數量1
MM 160KW
訂貨號6SL3320-1TE33-1AA3 數量2
SMC30
訂貨號6SL3055-0AA00-5CA2 數量2
大車變頻:
G120 CU240E-2DP
訂貨號6SL3244-0BB12-1PA1 版本V4.5 數量2
G120 PM240
訂貨號6SL3224-0BE33-7UA0 數量2
小車變頻:
G120 CU240E-2DP
訂貨號6SL3244-0BB12-1PA1 版本V4.5 數量1
G120 PM240
訂貨號6SL3224-0BE25-5UA0 數量1

圖5 電氣控制柜
2)系統結構
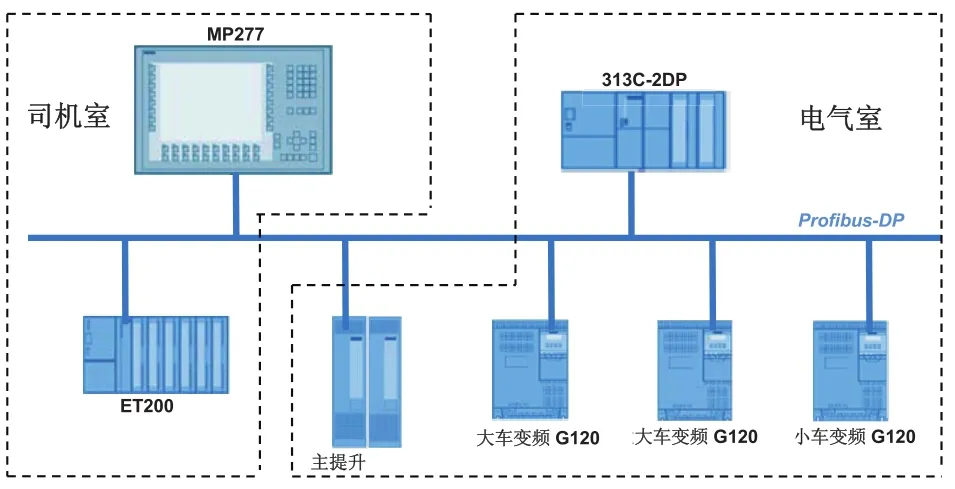
圖6 系統結構圖
3)硬件配置
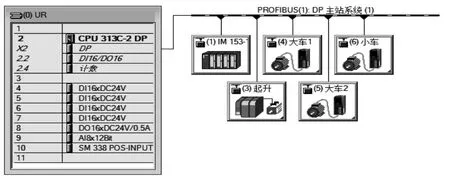
圖7 硬件配置圖
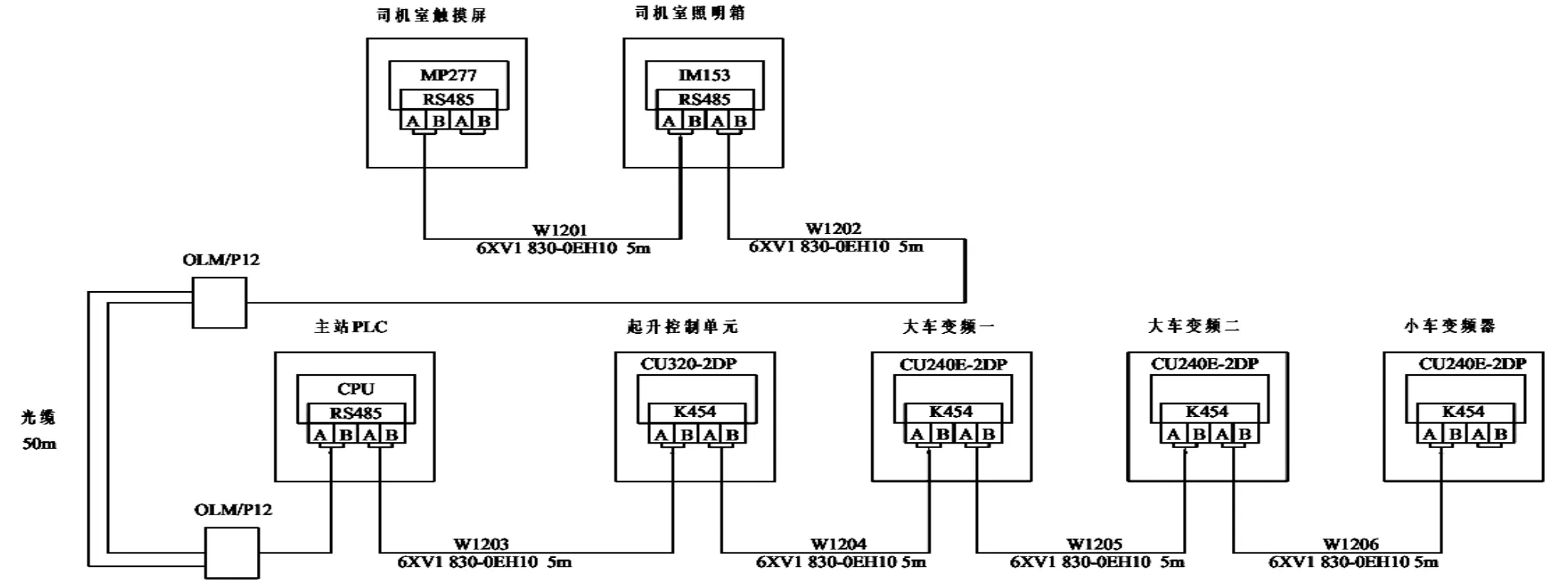
圖8 網絡結構圖
4)網絡結構
5)監視畫面
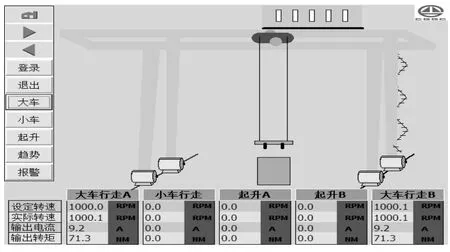
圖9 監控畫面
5 功能調試
主起升、小車、液壓抓梁等控制這里不再講述,這里主要介紹大車同步及定位控制技術。
1)大車同步
門機的大車行走機構由四個車輪構成,每個車輪由2臺電機驅動,軌道上同側兩車輪的4臺電機由一臺G120變頻器驅動,采用V/F控制。因為兩側車輪分別由兩臺變頻控制,為了避免啃軌,兩側車輪的轉速需要保持一致。因此采用叢叢通信的方式,將大車變頻1的實際轉速設為大車變頻2的設定轉速,在一個DP周期內實現設定轉速同步。
首先在硬件配置中設置報文,CPU313C接收大車變頻1的PZD同時,將其作為PZD發送給大車變頻2。
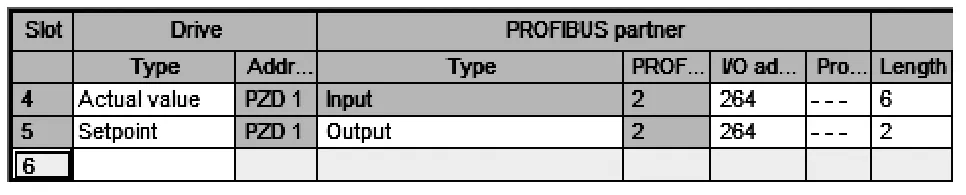
圖10 大車變頻1報文

圖11 大車變頻2報文
在Starter中將大車變頻1報文設為自由報文,修改報文P2050[0]=R2050[0]、P2050[1]=R63。
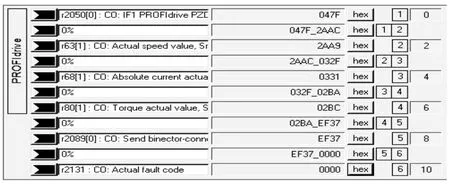
圖12 大車變頻1自由報文
在CPU313C中調用SFC14、SFC15周期一致性讀寫報文。
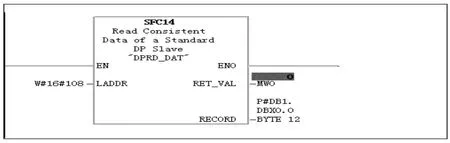
圖13 讀大車變頻1報文
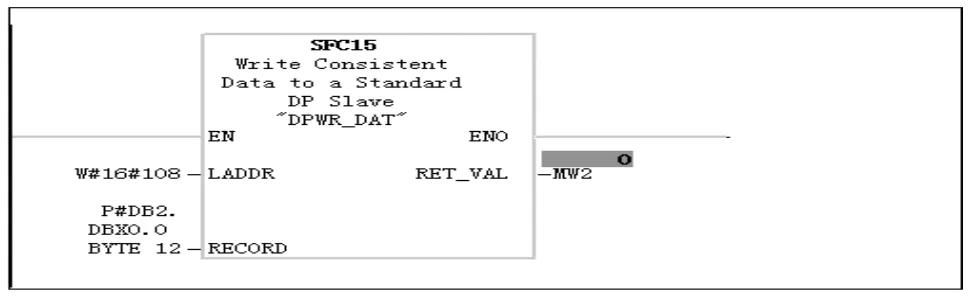
圖14 寫大車變頻1報文
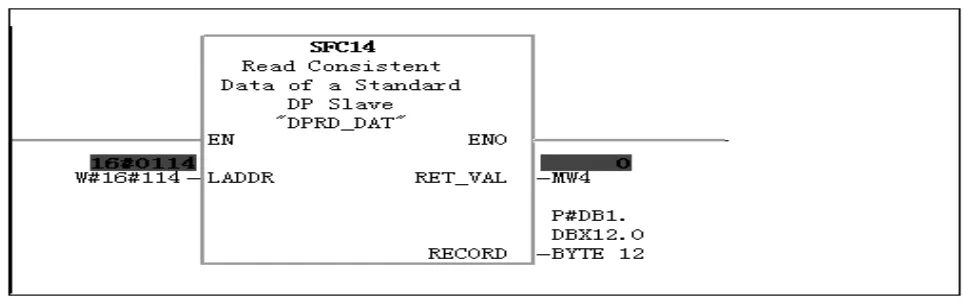
圖15 讀大車變頻2報文
通過叢叢通信,大車變頻1的控制字和實際轉速成為大車變頻2的控制字和設定轉速,無需調用SFC15寫大車變頻2報文。

圖16 大車變頻2接收報文
由于大車行走機構跨距大、軌道高低平整不一致、車輪直徑差、減速機速比差、聯軸器聯接松緊不一,容易導致大車兩側行走速度不一致而產生啃軌,需要手動調整。因此通常情況下,兩臺G120主從控制,大車變頻2通過DX通信獲取大車變頻1的控制字和實際轉速,并作為自己的控制字和設定轉速,使得速度同步。當門架兩邊位置產生偏差時,由操作員點動大車變頻1或2來調節大車位置偏差。
2)大車定位
工藝要求門機大車運行能自動對位(閘門孔口中心線和閘門庫中心線),門機大車可以運行至6個設定點位置自動停車,便于對閘門和設定位置其他重物的起吊。G120需要做簡單定位,可以采用停車后抱閘的方式。
OFF1和OFF3停車抱閘參數設置:P1215=1,P1216=100,P1217=100,P1226=20,p1227=400ms,P1228=10ms,P1335=0,P1351=0。勵磁完成后電機打開抱閘,但延時P1216才輸出頻率。

圖17 OFF1和OFF3停車抱閘曲線
實際頻率到達P1226所設置的靜態判斷值后,延長1228的時間,抱閘關閉。抱閘關閉后,延長1217的時間后,轉矩撤走。發出抱閘指令至到正抱緊抱閘,需要一定的響應時間,因此如果設的過短,電磁轉矩撤走后,抱閘仍沒有抱緊,非被動負載會發生溜車。
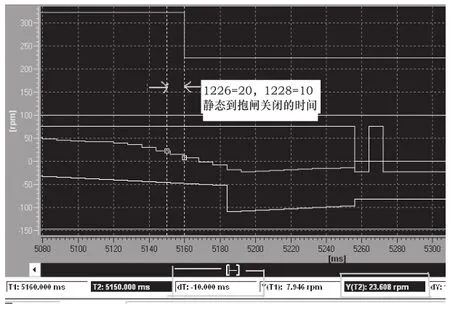
圖18 靜態至抱閘關閉時間
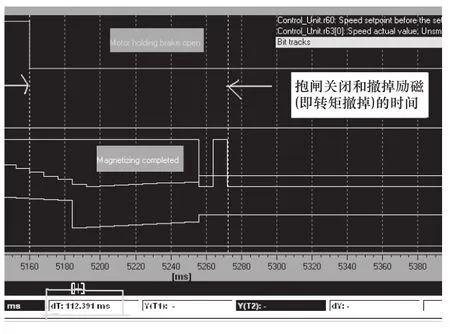
圖19 抱閘關閉至撤磁時間
現場發現OFF1、OFF3停車后抱閘的方式效果不好,由于機械差異且門機慣量比較大,每次停車的位置差別不一。最終采用在定位點兩側設置減速點,以最小速度2m/min運行至定位點后OFF2停車并抱閘。在大車的合適部位布置兩個瞬動型接近開關,一個為減速行程開關、一個為準確停位行程開關。在大車軌道旁的若干位置布置撞塊,實現大車的準確停位控制。
OFF2停車抱閘參數設置:
P1215=1, P1216=100, P1335=0, P1351=0。
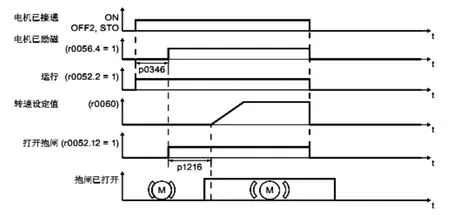
圖20 OFF2停車抱閘控制圖
CU240B/E-2相對與CU240S有一個改進,CU240B/E-2抱閘打開后,變頻器再輸出頻率,即使最小頻率不為0;而CU240S在抱閘打開之前就開始輸出頻率,最小頻率的時候打開抱閘,所以在抱閘打開之前就有了轉差形成了轉矩,而抱閘還沒有打開,可能對抱閘不好,還有可能產生堵轉。
由于電機存在轉差,需要對抱閘的啟動頻率做轉差補償。設置參數:V/F:P1300=0,P1352=1351 P1351=100(R0330),P1310=0,P1334=0,P1335=0。
圖21 OFF2停車抱閘曲線
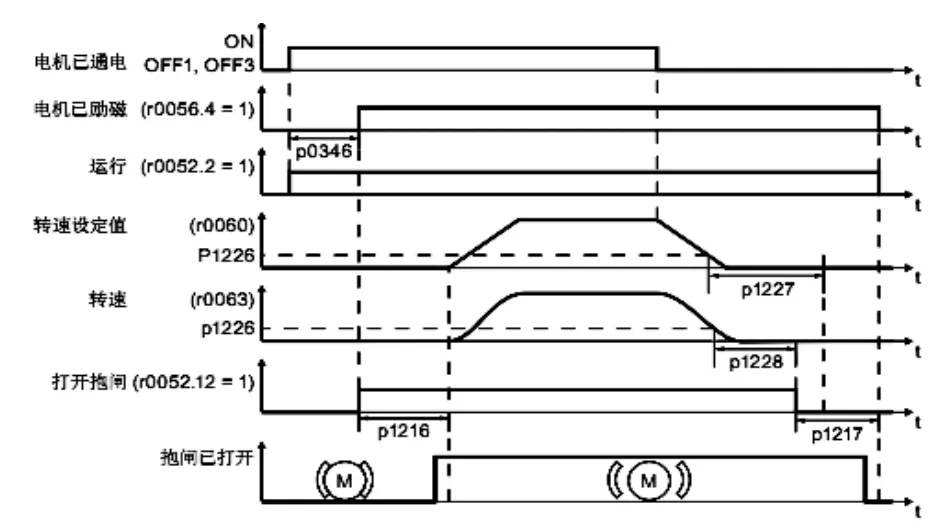
圖22 CU240B/E-2抱閘控制圖
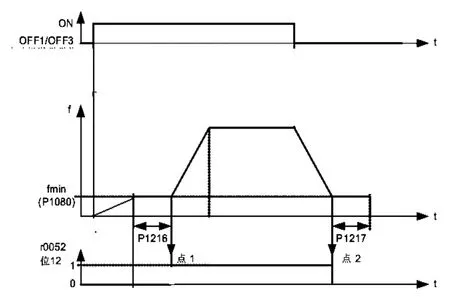
圖23 CU240S抱閘控制圖
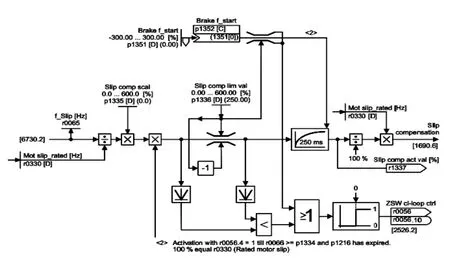
圖24 轉差補償功能圖
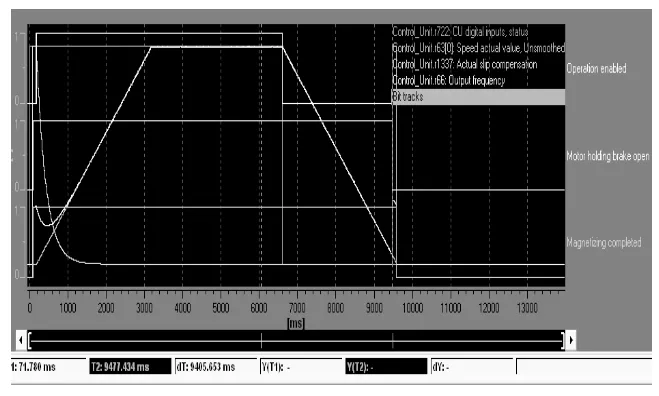
圖25 轉差補償曲線
6 結論
本項目的難點在于門機兩側的大車同步和簡單位置控制。由于門機兩側行走機構機械差異,雖然大車兩側給定速度一致,仍難免偶爾出現大車兩側位置不一致的情況,此時需要依靠點動來手動調整。工藝要求門機大車運行能自動對位(閘門孔口中心線和閘門庫中心線),門機大車可以運行至6個設定點位置自動停車,便于對閘門和設定位置其他重物的起吊。G120需要做簡單定位,可以采用停車后抱閘的方式。
[1] 《起重機設計規范》GB/T 3811.
[2] Sinamics S120調試手冊.
[3] Sinamics S7-300調試手冊.
猜你喜歡
消費電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(2021年3期)2021-08-13 08:39:56
防爆電機(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測控技術(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測試(2017年23期)2017-04-04 05:07:32
自動化博覽(2014年12期)2014-02-28 22:34:39
自動化博覽(2014年10期)2014-02-28 22:33:52
