一種捷聯慣性/GPS/陸基容錯復合導航方案設計
2015-11-15 05:13:02王新龍
航空兵器 2015年5期
王 勛,王新龍,車 歡
(1. 北京航空航天大學 宇航學院,北京 100191;2. 航天恒星科技有限公司,北京 100086)
0 引 言
捷聯慣導具有自主性強、動態性高、隱蔽性好以及短時精度高等優點,但誤差隨時間積累[1-4]。而GPS 定位精度高、誤差不隨時間積累,且具有全球性、全天候的特點,但其動態性和抗干擾能力較差[5]。相比于GPS 系統,陸基導航系統在工作區內信號強度大且動態性要求低[6],但定位精度相對較差,與GPS 系統有很強的互補性。因而,將SINS、GPS 和陸基導航系統進行優化組合配置,合理分配系統間的信息流程,對各子系統信息進行實時故障診斷與有效隔離,能夠實現系統性能優勢互補及保證冗余信息的有效利用。
基于此,本文設計一種SINS、GPS 以及陸基相結合的融合容錯導航方案。采用具有兩級結構的分散化聯邦濾波方法,對信息分配系數進行自適應調節,以抑制環境和GPS、陸基導航子系統精度差異對濾波的動態擾動;采用雙狀態χ2檢驗法,利用兩個狀態遞推器交替進行濾波校正與故障檢測,在避免故障污染的同時,又可對故障子系統進行實時修復與隔離,從而構成了一種高精度的捷聯慣性/GPS/陸基容錯復合導航系統。
1 復合導航系統濾波模型
1.1 復合導航系統狀態方程
1.1.1 捷聯慣導系統誤差模型
選擇地理坐標系作為SINS 導航解算的基本坐標系,則SINS 系統誤差模型如下所示:

式中:φn為失準角;δVn為速度誤差;δλ 和δL 為經緯度誤差;εb為陀螺儀漂移;εr為一階馬爾科夫過程;T 為相關時間;wr為白噪聲;Δb為加速度計零偏;Re為地球半徑。
將式(1)寫成矩陣形式為

式中:

其中:FN為對應于SINS 的9個誤差參數(3個姿態誤差,3個速度誤差,3個位置誤差)的系統動態矩陣,為9 ×9 階的方陣;FI陣的元素可參考文獻[7]的附錄。
1.1.2 GPS 導航系統誤差模型
在GPS 定位測量誤差源中,接收機鐘差是造成GPS 定位的主要誤差源,即使采用差分工作方式亦無法消除這一誤差源[8]。在建立誤差方程時,考慮到載體的高動態特性,加速度會造成鐘頻偏移。因而選取狀態變量δt,δf,δfa分別為接收機鐘偏、鐘偏漂移和鐘偏加速度漂移率,則可得GPS 誤差方程為

結合捷聯慣性導航系統的誤差模型以及GPS導航系統的誤差模型,可得SINS/GPS 子濾波器1的狀態方程如下所示:

式中:

1.1.3 陸基導航系統誤差模型
陸基導航系統中VOR(Very High Frequency Omnidirectional Radio Range)和 DME (Distance Measuring Equipment)的誤差包含兩個分量[9]:一個分量具有長的相關時間,其模型可建立為隨機偏置;另一個分量具有短的相關時間,其模型可建立為白噪聲。這些誤差分量的均值事實上均為零。取bV,eV分別表示有長相關時間及短相關時間的VOR 誤差分量,其數學模型可寫為


取兩個陸基地面站,并綜合捷聯慣性導航系統的誤差模型以及陸基導航系統的誤差模型,可得SINS/陸基子濾波器2 的狀態方程如下所示:

式中:

1.2 復合導航系統量測方程
1.2.1 子濾波器1 量測方程
取SINS 與GPS 輸出的速度和位置之差作為量測,定義位置量測方程為

定義速度測量方程為

式中:

聯立位置和速度量測方程,得到子濾波器1 的量測方程為

1.2.2 子濾波器2 量測方程
取兩個陸基地面站,設矢量R1,R2,R12分別用東向、北向及天向表示(x1,y1,h1),(x2,y2,h2),(x12,y12,h12),其中取V1和D1,V2和D2分別表示從地面站1 和地面站2 得到的測量值。由此可得

將上式在標稱飛行軌跡附近展開成泰勒級數,并取一階項,可得如下量測方程:

式中:

點 評:小作者以一雙自由的的眼睛上天、入地、下海、遨游太空,展現了他渴求知識、探尋未知,肩負家國,心懷世界的胸襟,是一篇難得的想象詩。
2 復合導航系統的容錯性濾波方案設計
單狀態χ2檢驗法是復合導航系統故障檢測常用的方法[10],但直接將其應用于復合導航系統的故障檢測會存在以下問題[11]:由于在狀態遞推器中沒有量測更新,模型誤差、系統噪聲與濾波初值誤差會導致狀態遞推值偏離真實值,使狀態檢測函數不能實時跟蹤故障變化,其直接結果是降低了檢測靈敏性,而周期性地用濾波結果來重置狀態遞推器又會使其受到故障污染。雙狀態χ2檢驗法是在單狀態χ2檢驗法的基礎上發展起來的一種新的故障檢驗方法[12],它是利用兩個狀態遞推器,交替地用子濾波器信息重置和故障檢測。并采用對狀態元素進行單獨檢測的方法,以獲得故障對某一狀態的影響程度大小。
2.1 雙狀態χ2 檢驗法

式中:β(k)服從高斯分布,且均值為零,設其方差為B(k)。
當子系統發生故障時,通過檢驗β(k)均值即可確定系統是否發生了故障。對β(k)作如下的二元假設:
H0:系統無故障

H1:系統有故障

根據β(k)及其方差B(k),構建故障檢測函數:

式中:B(k)表達式為

為了獲取故障對某一狀態的影響程度,考慮對β(k)中的元素進行單獨檢測,則對于β(k)中第i個元素,有

式中:Bi,i(k)為方差矩陣B(k)中對角線上的元素。
若定義變量ζβi如下:

則可采用如下判定準則進行故障檢測:

式中:εβi為檢測門限,由預先給定的誤警率依據奈曼-皮爾遜準則得到。
采用上述判定準則,即可對不同狀態進行檢測,受故障污染最嚴重的狀態將首先被檢測出來。圖1 為基于雙狀態χ2檢驗法的故障檢測實現結構框圖。

圖1 基于雙狀態χ2 檢驗法的故障檢測原理
圖1 中,子濾波器和雙狀態遞推器同步執行,子濾波器由傳感器量測數據驅動,輸出包含有量測更新的狀態估計及其方差Pz(k)。設在ti(i=1,2,…,n)時刻,利用狀態估計)對任一個狀態器進行重新賦值,其他時刻ti≤k <ti+1(i =1,2,…,n)工作于故障檢測狀態。當k=t2i-1(i=1,2,…,n)時,開關K1處于1 處,重置狀態遞推器I;當t2i-1≤k <t2i時,開關K2處于2 處,此時狀態遞推器Ⅱ進行故障檢驗。當k =t2i(i =1,2,…,n)時,開關K1處于2 處,重置狀態遞推器Ⅱ。當t2i≤k <t2i-1時,開關K2處于1 處,此時狀態遞推器I 處于故障檢驗狀態。故障檢驗采用狀態χ2檢驗法,通過給定的誤警率得到檢測門限,以獲取系統故障狀況。
2.2 故障隔離策略
系統檢測出故障狀態后,就需要及時隔離故障子系統,采取如下故障隔離準則:
(1)若子系統SINS/陸基或SINS/GPS 其中一個發生故障,認為局部估計或失效,則不將其輸入主濾波器。此時,系統誤差狀態的整體估計為

(2)若兩個子系統同時發生故障,主濾波器將直接輸出慣導系統的狀態:

根據上述故障隔離策略,只利用未失效的量測驅動子濾波器進行狀態估計,同時對失效的子系統進行故障修復。當失效的子系統重構完畢,則相應子濾波器又可提供正確的局部狀態估計值,將其輸入主濾波器,使該組合導航系統重新為系統提供連續、精確的導航信息。
2.3 基于雙狀態χ2 檢驗法的容錯融合方案
采用兩級數據融合形式的聯邦濾波器,先分散處理,再全局融合,它具有設計靈活、計算量小、容錯性能好等優點[13],是提高復合導航系統的精度和可靠性的行之有效的融合方法。所設計的捷聯慣性/GPS/陸基容錯導航系統的信息融合流程框圖如圖2 所示。

圖2 捷聯慣性/GPS/陸基容錯導航系統信息流程框圖
圖2 中,兩個子系統SINS/GPS、SINS/陸基經過兩個子濾波器后,送入相應的故障檢測單元,利用雙狀態χ2檢驗法檢測故障狀態,并判別子濾波器輸出是否可用,僅將可用的估計值送入主濾波器,以給出可靠的全局最優誤差狀態估計值同時,將全局最優估計及其相應的協方差β-1iPg反饋到子濾波器,以重置子濾波器的估值。
由于各子濾波器之間彼此相關,需要采用信息分配原理實現聯邦濾波解算。而對于動態較高的載體,動態模型誤差偏差較大,同時GPS、陸基系統的定位精度差異,環境因素引發的各種輸出誤差或異常,均可能使濾波系統產生擾動。考慮到濾波誤差協方差陣P 能夠反映導航傳感器精度差異與環境干擾的綜合性能。因而,聯邦濾波信息分配系數如下形式:

式中:tr(Pi)為矩陣Pi的跡;其值越小,則第i個子濾波器的估計精度越高,對全局估計的利用權重就越大。
需要指出的是,主濾波器根據環境擾動與實際傳感器精度動態調整信息分配系數βi,控制GPS和陸基導航子系統的信息融合等級,并將主濾波信息反饋到子濾波器進行校正,這實際上間接地利用高精度GPS 信息來提高陸基定位精度,從而提高整體估計精度。
3 仿真驗證
3.1 仿真條件設定
仿真時間為600 s,SINS 解算周期為0.01 s,子濾波器和主濾波器濾波周期均為1.0 s。仿真中,設置兩種類型的故障:硬故障(突變故障)和軟故障(緩變故障),具體如表l 所示。

表1 故障檢測方案的故障設置
仿真條件分別設定無故障、硬故障(突變)和軟故障(緩變)三種不同情況,其中,無故障設定SINS、陸基以及GPS 均正常工作;硬故障設定GPS和陸基分別在100 ~150 s 和350 ~450 s 時間段,突變大小分別為0.08'和0.10';軟故障設定GPS和陸基分別在200 ~250 s 和500 ~550 s 時間段,GPS 在三個方向上的位置誤差每秒均增大0.001',陸基在三個方向上的位置誤差每秒均增大0.001 5',緩慢變化后均即時恢復正常狀態。
3.2 仿真結果及分析
3.2.1 故障檢測性能仿真與驗證
針對無故障、硬故障(突變)和軟故障(緩變)三種不同仿真條件,采用雙狀態χ2檢驗法對三種不同形式的工作狀態進行檢測。
(1)無故障情況
圖3 ~4 為陸基和GPS 子系統的故障檢測函數計算值與告警輸出曲線,根據給定的誤警率0.1%設置檢測門限為10.83,發生故障時即檢測函數值高于檢測門限則告警輸出為“50”,否則輸出為“0”。可以看出,無故障時兩個子系統均正常工作,告警輸出始終為“0”,沒有誤警發生。

圖3 陸基子系統故障檢測與告警輸出

圖4 GPS 子系統故障檢測與告警輸出
(2)硬故障(突變)情況
圖5 ~6 為設置硬故障時,陸基和GPS 子系統輸出的位置誤差曲線。

圖5 陸基子系統輸出的位置誤差曲線
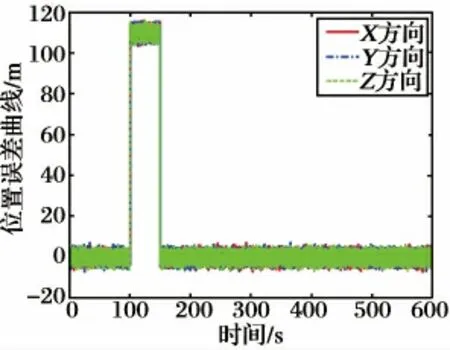
圖6 GPS 子系統輸出的位置誤差曲線
圖7 ~8 為設置某時段突變故障條件下,陸基和GPS 子系統的故障檢測函數計算值與告警輸出曲線。其中,陸基和GPS 子系統故障檢測單元分別在351.3 s 和100.3 s 時刻出現告警,判定系統開始發生故障,告警結束時刻分別為401. 8 s 和154.2 s,系統恢復正常。可見,兩個子系統的告警開始與結束時刻均有一定的延遲,這與檢測周期及每個故障檢測周期內故障判定次數的選取有關,判定次數越大,檢測靈敏度越高但計算量也隨之增大。

圖7 陸基子系統故障檢測與告警輸出
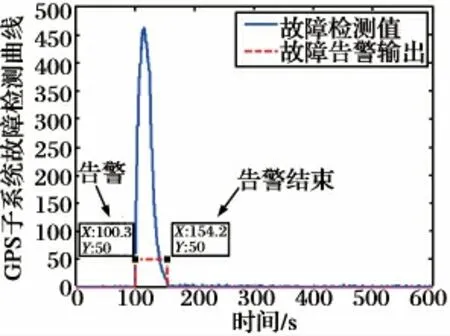
圖8 GPS 子系統故障檢測與告警輸出
(3)軟故障(緩變)情況
圖9 ~10 為設置軟故障時,陸基和GPS 子系統輸出的位置誤差曲線。

圖9 陸基子系統輸出的位置誤差曲線

圖10 GPS 子系統輸出的位置誤差曲線
圖11 ~12 為設置某時段軟故障條件下,陸基和GPS 子系統的故障檢測函數計算值與告警輸出曲線。從圖中可以看出,故障檢測單元檢測出的故障時刻為506.8 s 和205.2 s,實際故障的發生時間是500 s 和200 s,檢測出故障的時間分別比實際故障時間延遲6.8 s 和5.2 s,這是由于緩變故障開始的一段時間內,故障很小,檢測函數值也很小,而隨著故障增大,檢測函數值逐漸增大,當超過檢測門限時,故障出現告警。需要指出的是,緩變故障在被檢測出之前,其對導航精度的影響較小。

圖11 陸基子系統故障檢測與告警輸出

圖12 GPS 子系統故障檢測與告警輸出
從對上述三種故障情況的檢測結果可以看出,故障檢驗單元能夠有效判別故障與否,并可以檢驗出突變故障和緩變故障,且具有較高的檢測靈敏度。
3.2.2 故障隔離性能仿真與驗證
利用600 s 仿真數據進行仿真,兩個狀態遞推器交替檢測時間間隔為2.0 s。為了驗證算法對任一子系統發生故障后進行隔離與修復的有效性,使用表1 的故障設置條件,故障隔離后的濾波結果如圖13 ~14 所示。

圖13 故障隔離后濾波位置誤差

圖14 故障隔離后濾波速度誤差
從圖13 ~14 可以看出,故障隔離后的位置誤差限制在5 m 以內,速度誤差在0.2 m/s 以內,故障隔離后的濾波精度較高。這是由于故障檢測單元在檢測出子系統發生故障后,快速隔離故障子系統,使其子系統輸出值不進入主濾波器。此外,由于主濾波器不斷地對兩子濾波器進行重置,利用各子系統的誤差協方差陣,對信息分配系數進行自適應調節,有效抑制了環境干擾和GPS、陸基子系統精度差異對濾波的擾動,從而使精度相對較低的陸基系統子濾波器能夠不斷地得到主濾波器的濾波反饋信息來提高精度,充分保證了主濾波器輸出的準確性和實時性。
4 結 論
設計了一種基于雙狀態χ2檢驗法的捷聯慣性/GPS/陸基容錯復合導航方案,利用導航子系統誤差協方差陣對信息分配系數進行動態調節,能夠適應環境與傳感器精度的實際變化;設計的基于雙狀態χ2檢驗法的故障診斷方案和容錯策略,能夠有效診斷并隔離GPS 和陸基導航子系統的突變、緩變故障,具有較高的工程應用價值。
[1]于潔,王新龍. SINS/GPS 緊密組合導航系統仿真研究[J].航空兵器,2008(6):8-13.
[2]李佩娟,徐曉蘇,王立輝,等. 水下無源組合導航系統智能容錯方法設計[J]. 中國慣性技術學報,2013(2).
[3]王龍,張擁軍,張文山,等. 地面系下的GPS/SINS 組合導航算法設計[J]. 航空兵器,2010(3):15-17.
[4]李鵬,趙興鋒,鄭志強. SINS/TACAN/ADS/OES 機載組合導航設計與仿真[J]. 航空兵器,2008 (5):21-24.
[5]任建輝,蘇祥榮,王文輝,等. 容錯捷聯慣性/星光/衛星組合導航技術研究[J]. 戰術導彈控制技術,2010,27(2):1-5.
[6]方凌. 民航陸基近距無線電建模與機載綜合導航可靠融合技術[D]. 南京:南京航空航天大學,2012.
[7]董緒榮. GPS/INS 組合導航定位及其應用[M]. 長沙:國防科技大學出版社,1998.
[8]申功勛,孫建峰. 信息融合理論在慣性/天文/GPS 組合導航系統中的應用[M]. 北京:國防工業出版社,1998.
[9]李正強,王宏力,楊益強,等. 信息融合技術在組合導航系統中的應用[J]. 飛行力學,2006,24(1):89-92.
[10]Brumback B,Srinath M D. A Fault-Tolerant Multisensor Navigation System Design[J]. IEEE Transactions on,Aerospace & Electronic Systems 1987,23(6):738-756.
[11]Da Ren,Lin Chingfang. Failure Detection and Isolation Structure for Global Positioning System Autonomous Integrity Monitoring[J]. Journal of Guidance Control and Dynamics,2012,18(2):291-297.
[12]Da Ren. Failure Detection of Dynamical Systems with the State Chi-square Test[J]. Journal of Guidance Control and Dynamics,1994,17(2):271-277.
[13]賀元軍,董鵬. 多模復合制導中多傳感器分布式融合技術研究[J]. 航空兵器,2010(3):9-14.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50