鏈式靜止同步補償器控制系統的研究與設計
2015-12-14 13:20:45魏麗君謝永超
中國測試 2015年12期
關鍵詞:信號
魏麗君,謝永超
(1.中南大學地球科學與信息物理學院,湖南 長沙 410083;2.湖南鐵道職業技術學院,湖南 株洲 412001)
鏈式靜止同步補償器控制系統的研究與設計
魏麗君1,2,謝永超2
(1.中南大學地球科學與信息物理學院,湖南 長沙 410083;2.湖南鐵道職業技術學院,湖南 株洲 412001)
該文基于串聯多電平技術,完成一套鏈式靜止同步補償器控制系統的研究與設計。根據反饋解耦控制算法和單級倍頻載波相移正弦脈寬調制方法,采用串聯多電平技術,以TMS320F28335為核心處理器,采用軟件算法實現補償器直流側電壓均衡控制。設計鏈式結構的三相電壓源逆變器,構成鏈式靜止同步補償器系統,實現系統無功補償控制。經過試驗測試,結果表明:該系統的無功補償效果與理論一致,設計可行、可靠。
無功補償;反饋解耦控制算法;串聯多電平;鏈式靜止同步補償器
0 引 言
隨著電力行業的日益發展和相關新型裝置的廣泛運用,電能質量問題日益凸顯。諧波的存在造成了無功功率的增加,給電網造成了污染,同時也增加了設備的容量。因此,開發新的智能裝置,對電力系統進行無功補償顯得越發重要。目前主要采用靜止無功補償器(SVC)和靜止同步補償器(STATCOM)進行無功功率的補償[1-3]。SVC目前在同容量成本上較STATCOM低,但在動態響應速度和可控性能方面,STATCOM遠優于SVC。STATCOM還可以設計用作濾除電力系統諧波的有源濾波器[4-5]。
本文根據反饋解耦控制算法和單級倍頻載波相移正弦脈寬調制方法,采用串聯多電平技術,以TMS320F28335為核心處理器,用軟件算法實現補償器直流側電壓均衡控制,設計了鏈式結構的三相電壓源逆變器,構成了鏈式靜止同步補償器系統,實現對電網的無功補償。相比傳統的無功補償設備,本文設計的系統具有調節速度、運行范圍寬的優點,而且在采取多重化、多電平或PWM技術等措施后可減少補償電流中諧波的含量[6-8]。
1 系統設計方案
本設計的主要目的是實現電網的無功補償,采用串聯多電平技術,系統分為主電路和控制電路兩部分。系統總體電路結構圖如圖1所示。
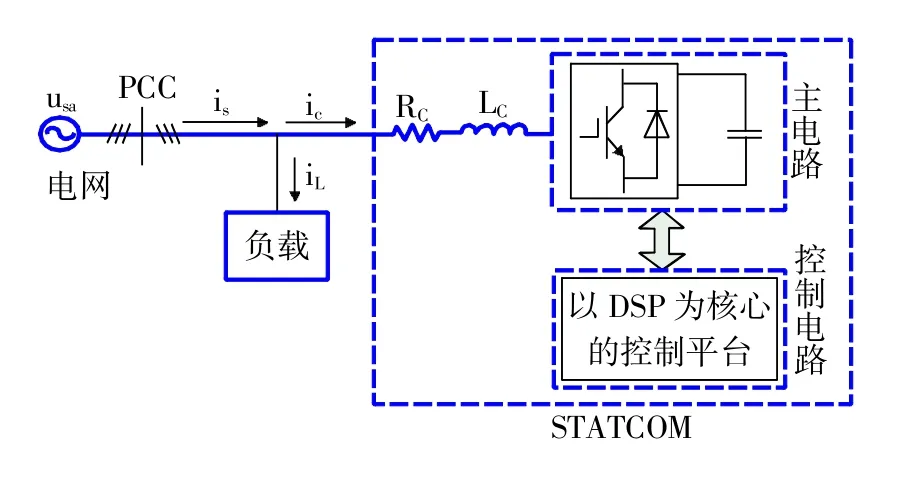
圖1 系統整體硬件框圖
2 系統硬件設計
2.1系統硬件結構框圖
系統由主電路和控制電路兩部分組成,硬件結構框圖如圖2所示。主電路拓撲為串聯5電平逆變器;控制電路主要包括DSP控制器、24路PWM波形發生器等。其中DSP主要完成相關控制算法、負載電流的檢測、補償電流的采樣等。而24路PWM波形發生器采用FPGA實現[9]。
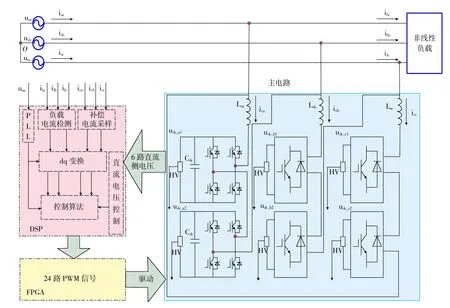
圖2 系統硬件結構框圖
2.2控制電路硬件設計
2.2.1控制電路總體結構
控制電路是整個系統的重要組成部分,采用FPGA+DSP的全數字控制平臺方案,其結構如圖3所示。其中,FPGA主要實現PWM信號的產生,而直流側電壓控制、基波電網電壓鎖相、統過壓、過流保護、指令電流運算系等功能則由DSP負責實現。為了確保采樣的精度,采用3片AD7656對三相電網電壓usa、usb、usc,三相電網電流isa、isb、isc,STATCOM輸出電流 ica、icb、icc以及負載電流 ila、ilb、ilc,各 2H橋直流側電容電壓udck(k=1,2,…,6)共18路信號進行轉換。
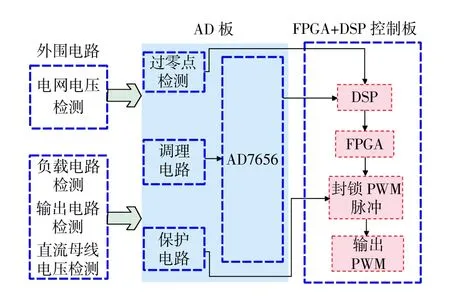
圖3 控制電路硬件結構框圖
2.2.2信號調理電路
信號調理電路分為兩級,如圖4所示。第1級主要去除信號中的高頻干擾,設計采用抗混疊低通濾波器;第2級主要完成信號放大,將經過濾波處理后的信號幅值調整到合適范圍后由A/D轉換器完成模數轉換[10]。
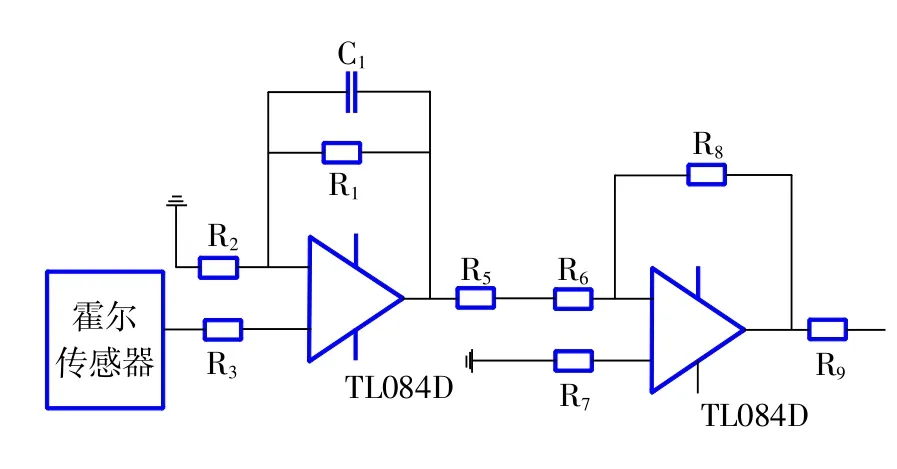
圖4 信號調理電路
根據采樣信號的頻率(50 Hz),設計截止頻率為100Hz的一階低通濾波器,并同相輸入;其中,C1=0.1 μF,R1=10 kΩ,R2=10 kΩ,R3=510 Ω,R5=6.2 kΩ,R6=6.6kΩ,R8=20kΩ。
2.2.3過零點檢測電路
在硬件設計過程中,為了實現控制算法,需要對變換過程中的信號進行同步,而準確鎖相要求電路能夠準確檢測出正弦電網電壓信號的過零點,為后面采用軟件方法實現鎖相提供條件,過零點檢測電路如圖5所示。
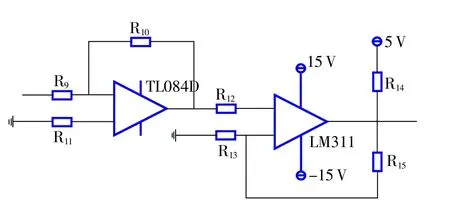
圖5 過零點檢測電路
為了保證同相以及實現信號的隔離,設計加入一個反相跟隨電路。由于電網電壓存在一定的干擾,故設計采用遲滯比較電路,滯后量由R13和R15決定,取滯后量為1mV,根據上圖,可得滯后量的表達式為

式中:VOH——輸出端高電頻,mV;
VOL——輸出端低電頻,mV。
選取R15為1MΩ,R13為10kΩ。由LM311的特性可得:電路中輸入的正弦波信號高于零電壓時,輸出為高電平;低于零電壓時,則輸出低電平。因此通過該電路,正弦信號將變為方波信號,其幅值為5V。其上升沿對應正弦波的過零點。因此,DSP捕捉過零點檢測電路輸出信號的上升沿,即可得到原正弦信號的過零點。
2.2.4保護電路
過壓過流保護電路如圖6所示。
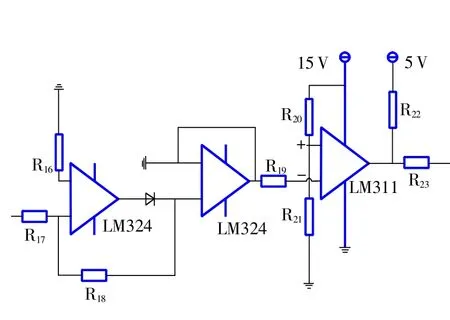
圖6 保護電路
保護電路的輸入端接信號調理電路的輸出,電路分為3級。第1級為LM324與二極管組成的取絕對值電路,將正負電壓轉化為正電壓以便進行比較。第2級跟隨器電路由LM324構成,其輸出接入由LM311組成的第3級比較電路。正常情況下,調理電路的輸出信號幅值為0~8V,所以非故障情況下,輸入LM311的信號幅值最大為8V。因此,設置保護電路的電壓閾值為9V。
3 系統軟件設計及指令電流計算的軟件實現
3.1系統軟件設計
系統的軟件設計包括3個環節:
1)按照反饋解耦的控制算法對采樣信號進行處理,得到無功補償的指令電壓信號。
2)根據指令電壓信號生成驅動開關管的PWM信號。
3)實現功率單元和控制單元通信。
3.2指令電流計算的軟件實現
無功補償的指令電壓信號是通過反饋解耦控制算法計算得出的,程序主要分為主程序和定時器中斷程序兩部分。
1)主程序流程圖
主程序流程如圖7所示。主程序中,DSP主要完成H橋模塊開關管的開關信號轉換為不同頻率的方波。
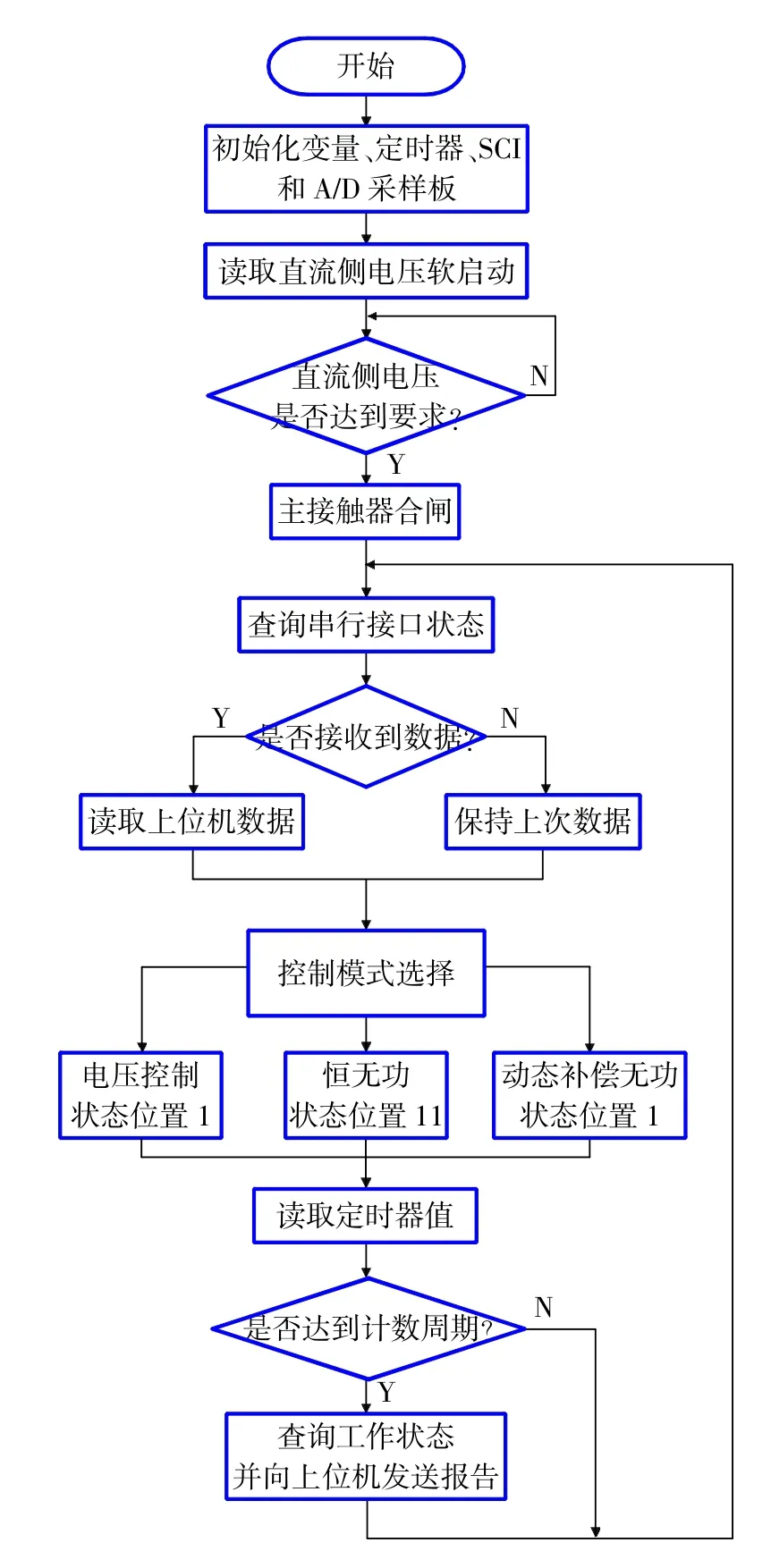
圖7 主程序流程圖
2)捕獲中斷子程序流程圖
捕獲中斷子程序流程如圖8所示,此中斷由過零點檢測電路輸出方波的上升沿觸發。
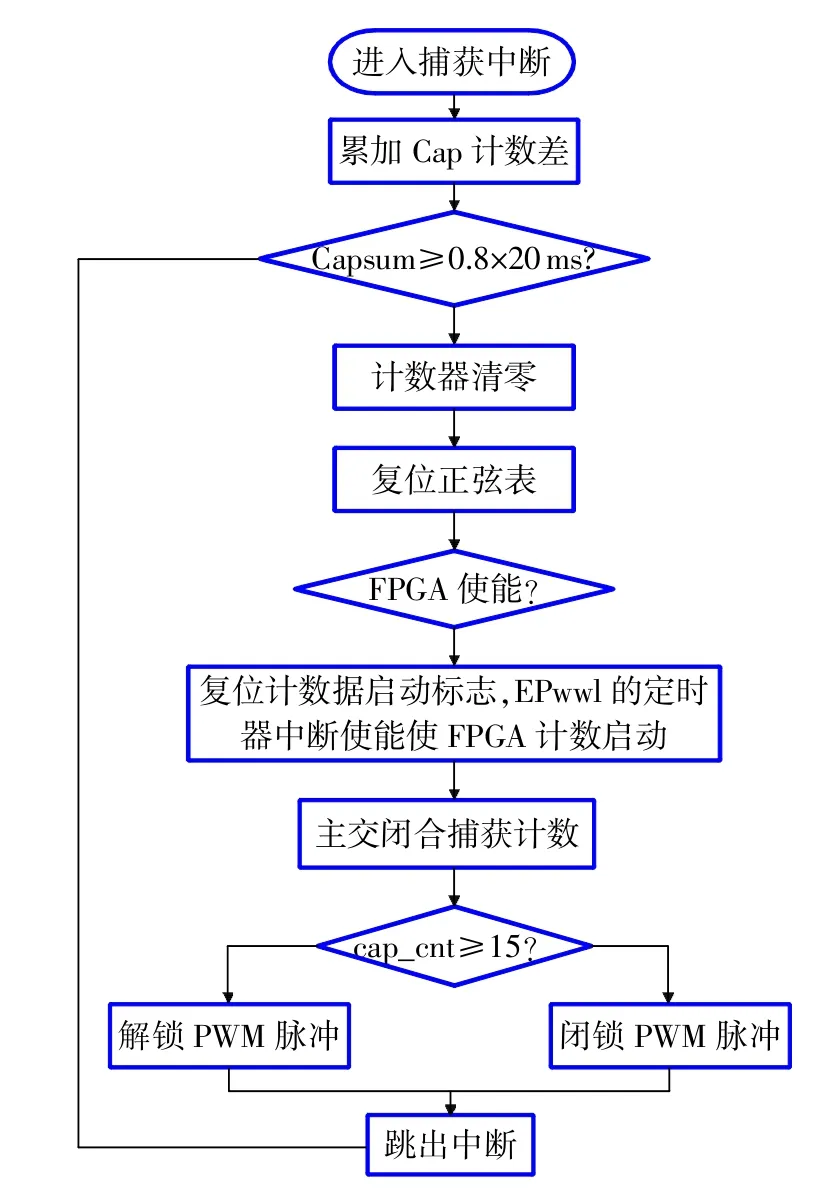
圖8 捕獲定時器中斷程序流程圖
3)EPWM1定時器中斷程序流程圖
EPWM1定時器中斷程序流程如圖9所示,其主要任務就是在確定工作狀態無故障的情況下,計算得出指令電壓信號,對其進行調整,得到PWM的調制波信號。
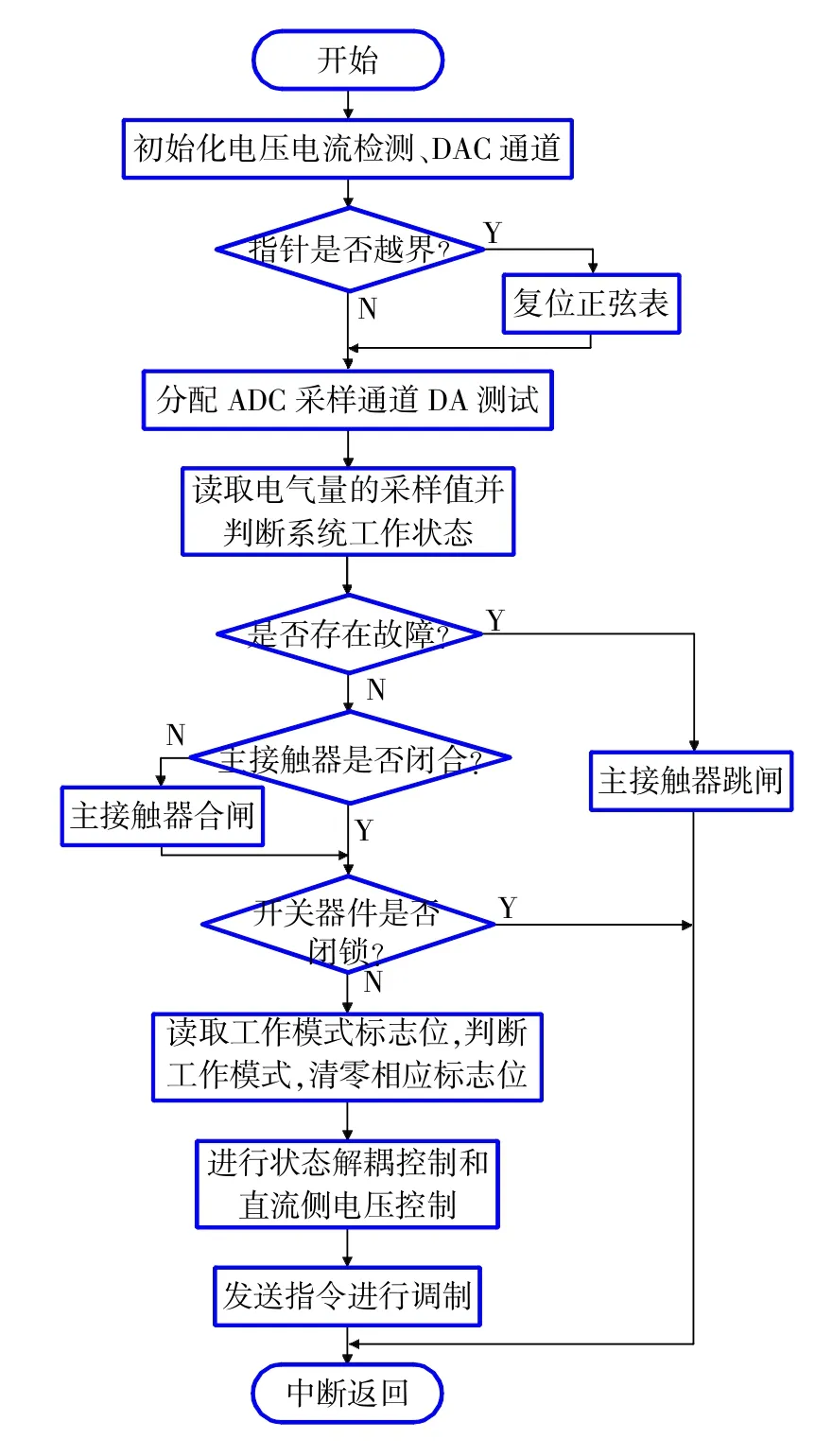
圖9 EPWM1定時器中斷程序流程圖
4)狀態解耦控制及直流側電壓控制程序流程圖
狀態解耦控制算法及直流側電壓控制算法的軟件實現流程如圖10所示,首先,進行所需要的各電氣量的采樣,當捕獲計數值達到要求后,計算dq變換所需要的數學量值及直流電壓控制所需要的電流、電壓量值,然后對三相補償電流和電網電壓進行dq變換,同時進行指令電流運算和PI調節,輸出量經dq反變換即可得到指令電壓信號。
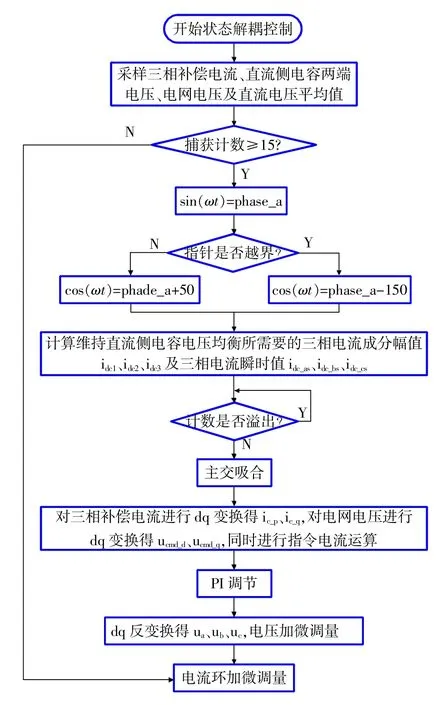
圖10 狀態解耦控制程序流程圖
4 試驗測試及結果
本設計的裝置主要是補償電網無功功率,主要測試:
1)測試各模塊直流側電壓的穩定和均衡性。
2)測試STATCOM輸出端電壓波形,驗證單級倍頻CPS-SPWM調制方法的正確性。
3)測試STATCOM輸出電壓電流波形,檢驗系統的無功補償效果。
4)測試系統過壓過流等故障情況下的保護功能。
4.1直流側電壓啟動過程及控制效果
首先,測試直流側電壓的啟動過程,共分為兩個步驟:1)在A、B、C三相H橋模塊各串聯一個57Ω的限流電阻,使變流器的開關管IGBT處于閉鎖狀態,利用與IGBT開關管的反并聯二極管實現不可控整流,從電網吸收有功功率,對H橋直流側電容充電,結束后,直流側電壓進入穩態,即H橋模塊直流側電容電壓之和等于電網線電壓峰值;2)時間繼電器動作將限流電阻短接,然后解鎖整個變流器的開關管驅動脈沖,利用PWM高頻整流繼續從電網吸收有功功率,將直流側電容電壓升高到給定值并穩定在其附近。
實驗時,利用三相可編程電源模擬三相電網,若給定電網電壓為40 V,第1階段為開關管反并聯二極管不控整流階段,穩定后H橋模塊直流側電壓為24.5V,當H橋模塊直流側電壓值趨于穩定以后控制繼電器動作把限流電阻短接,進入第2階段,即PWM高頻整流,實驗波形如圖11所示。
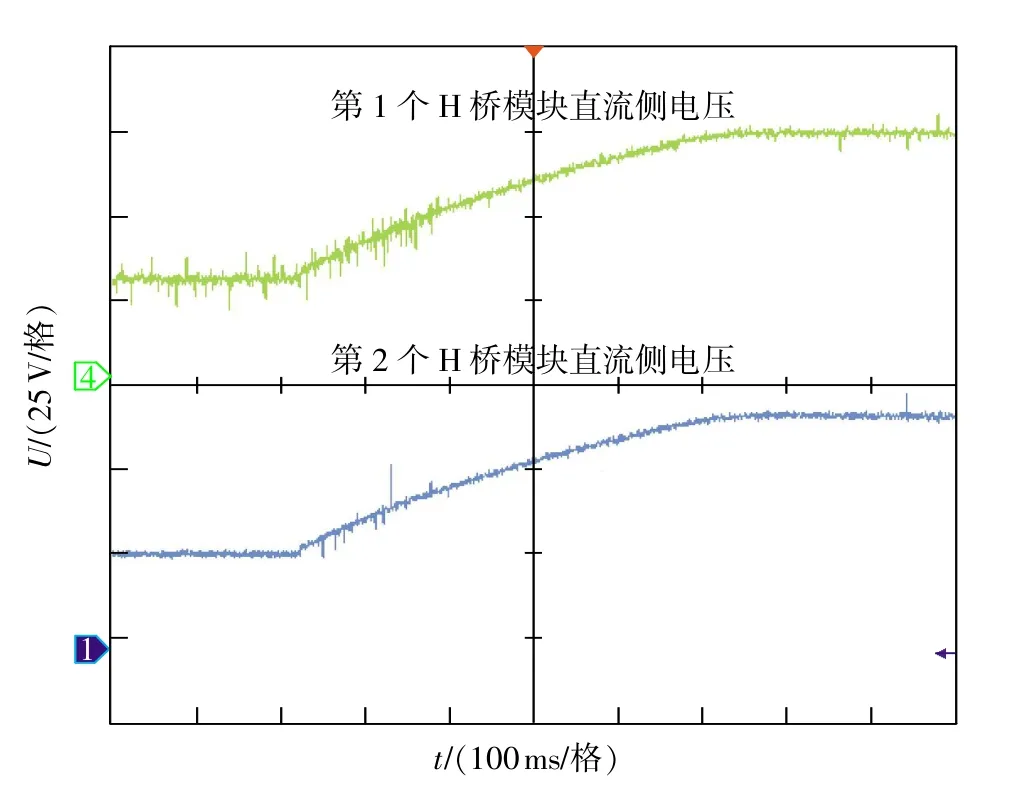
圖11 直流側電壓啟動過程波形
圖12給出了PWM高頻整流階段H橋模塊直流側電壓的實驗波形,兩個H橋模塊的直流側電壓恒定上升到給定值75V附近。這是因為,當H橋單相電路模塊電壓值接近給定值時,PI調節器開始起作用,使得調節后的電壓值不至于升得過高,而是穩定在給定值75V附近。
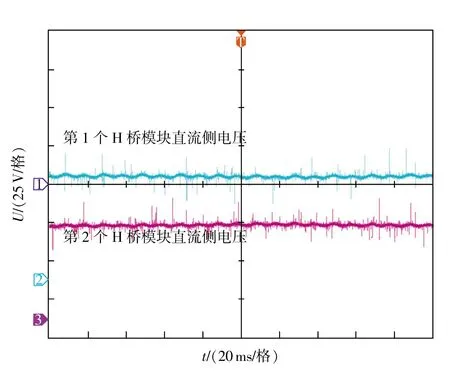
圖12 穩定后A相兩個H橋模塊直流側電壓
4.2單級倍頻CPS-SPWM技術
直流側電壓穩定后,即可啟動系統進行無功補償。系統主電路為基于串聯多電平的電壓源逆變器,驅動信號的生成采用單級倍頻CPS-SPWM技術,按照圖2~圖10所示算法,單相逆變器的輸出端相電壓應為5電平類似正弦信號的階梯狀波形。由于主電路采用Δ型連接,測試Ca,Cb,Cc任意兩點間電壓波形,得到的是三相線電壓,根據相電壓波形,可知線電壓應為9電平階梯狀類似正弦信號的波形,即為補償器輸出濾波前的電壓波形。用示波器測量Ca、Cb兩點間電壓,得到的結果如圖13所示。
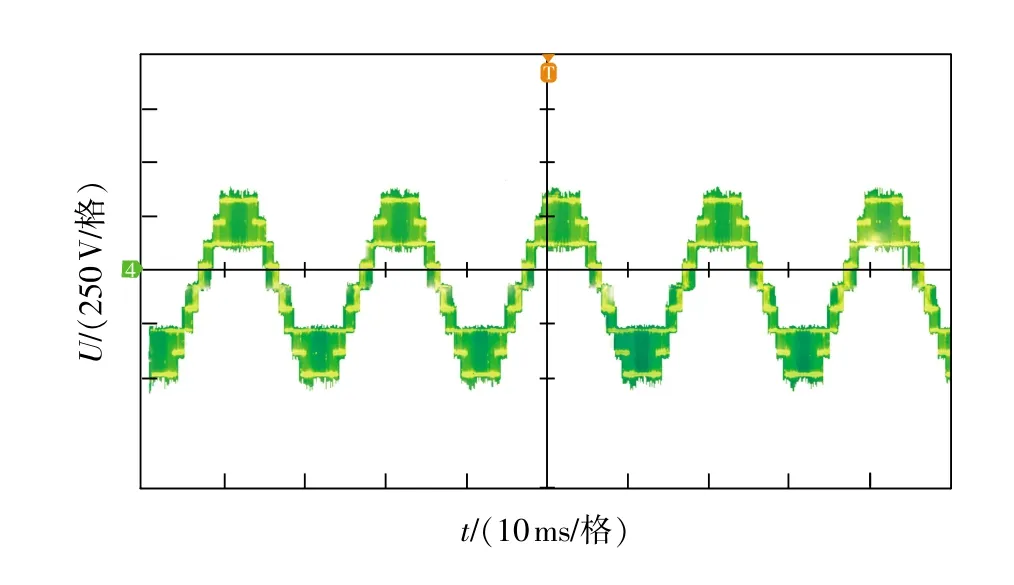
圖13 補償器輸出端濾波前電壓波形
圖中給出了補償器輸出濾波前電壓的實驗波形,電壓共9電平,頻率50Hz,與單級倍頻CPS-SPWM技術理論分析結果一致,證明了這種PWM信號調制方法的正確性。
4.3無功補償效果測試
將負載與電網斷開,此時補償裝置和電網直接相連,補償器輸出端電流超前電壓90°,電壓幅值高于電網電壓,測量補償器輸出端濾波后電流及采樣電壓,得到的結果如圖14所示。其中,電流為補償器輸出端電流,電壓為DA輸出的補償器輸出端電壓的采樣值。由圖可知,補償器輸出端電流相位超前電壓相位約90°,補償器工作在容性工況,與理論結果一致。
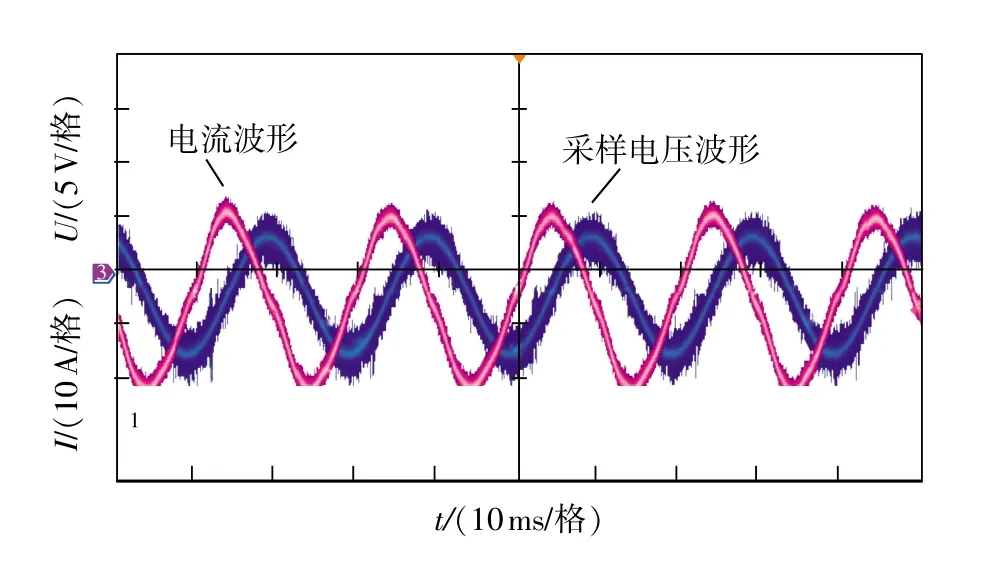
圖14 補償器輸出端濾波后電流及采樣電壓波形
4.4過流保護測試
當裝置在正常運行或啟動時,當裝置電流輸出大于額定電流20A的10%,即22A時,系統進入過流保護,閉鎖PWM脈沖,故障指示燈亮。當電流恢復到正常范圍,系統恢復正常運行。
5 結束語
根據測試實驗,可得以下實驗結論:
1)直流側電壓啟動過程及控制效果測試結果表明,文中設計采用的控制方法能夠實現直流側電壓的穩定和均衡控制。
2)單采用級倍頻CPS-SPWM技術能夠得到多電平輸出電壓。
3)無功補償效果測試結果與理論一致。
4)過壓過流保護測試結果符合設計要求。
[1]王靜.基于磁控開關電抗器的無功補償新方法[D].武漢:華中科技大學,2012.
[2]劉鵬升.基于磁閥式可控電抗器的配電網無功補償系統研究[D].長沙:中南大學,2013.
[3]金治乾.DSP智能無功補償及諧波抑制的研究[D].武漢:武漢理工大學,2008.
[4]湯涌,侯俊賢,劉文焯.電力系統數字仿真負荷模型中配電網絡及無功補償與感應電動機的模擬[J].中國電機工程學報,2005,25(3):8-11.
[5]王凌誼,侯世英,呂厚余,等.電力系統無功優化與無功補償[J].電氣應用,2006,25(10):45-48.
[6]Freitas W,Morelato A,Xu Wilsun,et al.Impacts of AC generators and DSTATCOM devices on the dynamic performance of distribution system[J].IEEE Trans.on Power Delivery,2005,20(2):1493-1501.
[7]于東民.淺談SVC無功補償和諧波抑制[J].中國高新技術企業,2011:10-11.
[8]陳緒軒,田翠華,陳柏超,等.多級飽和磁閥式可控電抗器諧波分析數學模型[J].電工技術學報,2011(3):57-64.
[9]Rao P,Crow M L,Yang Z P.STATCOM control for power system voltage control applications[J].IEEE Trans on Power Delivery,2000,15(4):1311-1317.
[10]黃曉勝,史歡,田翠華,等.基于磁控電抗器的變電站無功電壓控制[J].電力自動化設備,2011(8):99-102.
Research and design of control system for cascade static synchronous compensators
WEI Lijun1,2,XIE Yongchao2
(1.School of Geosciences and Info-Physics,Central South University,Changsha 410083,China;2.Hu’nan Railway Professional Technology College,Zhuzhou 412001,China)
A control system for cascade static synchronous compensators has been developed on the basis of cascaded multilevel technology.In combination with feedback decoupling control algorithm and sinusoidal pulse width modulation for single-level frequency doubling carrier phase shifting,using cascaded multilevel technology,TMS320F28335 as core processor and software algorithm were employed to realize compensator DC-side voltage balancing control.A chain-linked three-phase voltagesourceinverterwasdesignedaccordinglytoconstituteacascadestaticsynchronous compensator system,thus achieving the goal of reactive power compensation control.Tests prove that the system is feasible and reliable.
reactive power compensation;feedback decoupling control algorithm;cascaded multilevel;cascade static synchronous compensator
A
1674-5124(2015)12-0100-06
10.11857/j.issn.1674-5124.2015.12.025
2015-01-20;
2015-03-06
魏麗君(1983-),男,湖南婁底市人,講師,碩士,研究方向為智能儀器與儀表、電子技術。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06