基于專家系統(tǒng)的機(jī)場(chǎng)貨運(yùn)站雙ETV任務(wù)調(diào)度研究
2015-12-19 08:26:28蘭州交通大學(xué)機(jī)電技術(shù)研究所甘肅蘭州730070
物流科技 2015年3期
關(guān)鍵詞:作業(yè)
雷 斌 (蘭州交通大學(xué) 機(jī)電技術(shù)研究所,甘肅 蘭州730070)
LEI Bin (Mechanical and Electrial Technology Institute, Lanzhou Jiaotong University, Lanzhou 730070, China)
近年來,隨著航空貨運(yùn)需求的快速發(fā)展,國(guó)內(nèi)大型機(jī)場(chǎng)都相繼建設(shè)了自動(dòng)化的貨運(yùn)站。大型自動(dòng)化立體倉儲(chǔ)系統(tǒng)是機(jī)場(chǎng)貨運(yùn)站的主要設(shè)施,用于航空貨運(yùn)集裝設(shè)備(Unit Load Device, ULD) 的存放和輸送。升降式轉(zhuǎn)運(yùn)車(Elevating Transfer Vehicle,ETV) 是輸送和存儲(chǔ)ULD 的主要設(shè)備,作用和自動(dòng)化立體倉庫中堆垛機(jī)類似。由于機(jī)場(chǎng)貨運(yùn)站作業(yè)要求高效、低故障的要求,一般大型的機(jī)場(chǎng)貨運(yùn)站自動(dòng)化立體倉儲(chǔ)系統(tǒng)都配備兩臺(tái)或兩臺(tái)以上的ETV。機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)調(diào)度具有一般自動(dòng)化立體倉庫任務(wù)優(yōu)化調(diào)度的共性特征,同時(shí)具有其自身的特點(diǎn)。所謂“雙ETV”是指在同一個(gè)巷道內(nèi),有兩臺(tái)ETV 共同完成貨物堆垛輸送任務(wù)。兩臺(tái)ETV 互為備份,相互配合。近年來,自動(dòng)化立體倉庫作業(yè)優(yōu)化調(diào)度問題得到了廣泛深入的研究,所采用的方法包括模擬退火、遺傳算法、神經(jīng)網(wǎng)絡(luò)、Petri 網(wǎng)等[1-3]。文獻(xiàn)[4]、[5]運(yùn)用專家系統(tǒng),對(duì)常見的自動(dòng)化立體倉庫作業(yè)調(diào)度和貨位分配原則進(jìn)行了分析研究。文獻(xiàn)[6]、[7]對(duì)機(jī)場(chǎng)貨運(yùn)站的任務(wù)調(diào)度進(jìn)行了分析研究。對(duì)于機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)調(diào)度的研究,很少有文獻(xiàn)涉及。專家系統(tǒng)是一種在相關(guān)領(lǐng)域中具有專家水平解題能力的智能程序系統(tǒng),它能應(yīng)用專家多年積累的經(jīng)驗(yàn)與專門知識(shí),模擬人類專家的思維過程,求解需要專家才能解決的困難問題。本文運(yùn)用基于規(guī)則的專家系統(tǒng)的方法,對(duì)機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)調(diào)度進(jìn)行了分析歸納,建立了專家系統(tǒng)的知識(shí)庫和推理機(jī)制,通過算例,驗(yàn)證了專家系統(tǒng)能夠較好地提高機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)執(zhí)行的效率。
1 機(jī)場(chǎng)貨運(yùn)站的主要設(shè)備及任務(wù)
機(jī)場(chǎng)貨運(yùn)站的主要設(shè)備包括輸送系統(tǒng)、ETV、貨架等部分,一般布局平面圖如圖1 所示。其中輸送系統(tǒng)負(fù)責(zé)將ULD 輸送至ETV 與輸送系統(tǒng)交接臺(tái),輸送系統(tǒng)包括機(jī)場(chǎng)貨運(yùn)站陸側(cè)輸送系統(tǒng)和空側(cè)輸送系統(tǒng)。
機(jī)場(chǎng)貨運(yùn)站的任務(wù)包括入庫、出庫、直通、倒庫和盤庫等。入庫是將待出發(fā)的或到達(dá)的ULD 暫時(shí)存儲(chǔ)到貨架上的作業(yè)。出庫是將貨架上的ULD 下架后,輸送到空側(cè)準(zhǔn)備發(fā)運(yùn),或輸送到陸側(cè)拆解。直通是將ULD 直接由陸側(cè)輸送到空側(cè)發(fā)運(yùn)或直接由空側(cè)輸送到陸側(cè)拆解。倒庫是在ETV 沒有出入庫、直通和盤庫任務(wù)時(shí),將ULD 盡量搬運(yùn)到離出口近的位置存放,或?qū)⒁粋€(gè)航空公司的ULD 集中存放。
2 雙ETV 任務(wù)調(diào)度專家系統(tǒng)的建立
2.1 雙ETV 任務(wù)調(diào)度專家系統(tǒng)基本構(gòu)成
一般的專家系統(tǒng)有6 個(gè)組成部分:輸入部分、知識(shí)庫、推理子系統(tǒng)、綜合數(shù)據(jù)庫、解釋子系統(tǒng)和知識(shí)獲取系統(tǒng)。如圖2 所示。
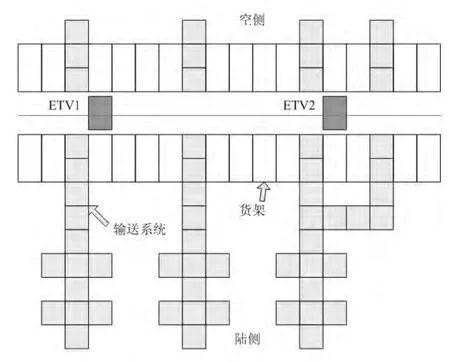
圖1 機(jī)場(chǎng)貨運(yùn)站平面布局圖
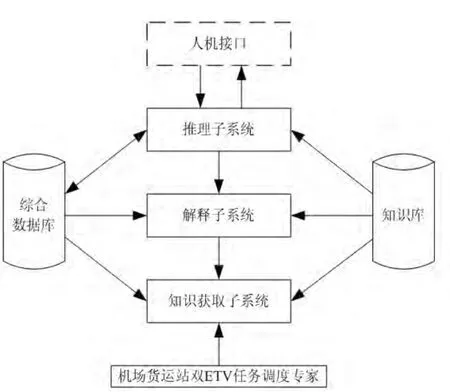
圖2 雙ETV 任務(wù)調(diào)度專家系統(tǒng)的結(jié)構(gòu)
知識(shí)庫存儲(chǔ)從專家那里得到的關(guān)于機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)調(diào)度的專門知識(shí);推理子系統(tǒng)具有依據(jù)一定調(diào)度策略進(jìn)行推理的能力,即能夠依據(jù)知識(shí)庫推導(dǎo)出結(jié)論而不是簡(jiǎn)單地去搜索現(xiàn)成的答案;綜合數(shù)據(jù)庫用于存放系統(tǒng)運(yùn)行過程中所需要和產(chǎn)生的所有信息,包括問題的描述、中間結(jié)果、解題過程的記錄等信息;解釋子系統(tǒng)負(fù)責(zé)回答用戶提出的各種問題;知識(shí)獲取子系統(tǒng)負(fù)責(zé)管理知識(shí)庫中的知識(shí),包括根據(jù)需要修改、刪去或添加知識(shí)及由此引起的一切必要的改動(dòng),維持知識(shí)庫的一致性、完整性等。
2.2 雙ETV 任務(wù)調(diào)度專家系統(tǒng)知識(shí)庫的建立
機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)調(diào)度主要是作業(yè)任務(wù)調(diào)度,即將眾多待執(zhí)行的任務(wù)進(jìn)行排序。重點(diǎn)解決兩臺(tái)ETV 協(xié)調(diào)工作,達(dá)到效率最高。知識(shí)庫就是在作業(yè)調(diào)度原則的基礎(chǔ)上建立的。
2.2.1 作業(yè)調(diào)度原則
(1) 先到先服務(wù)原則:這是作業(yè)調(diào)度的基本原則之一,不考慮任務(wù)類型和優(yōu)先級(jí)等因素,先到的任務(wù)申請(qǐng)先處理。這種原理適用于同類任務(wù)或優(yōu)先權(quán)對(duì)系統(tǒng)影響很小的系統(tǒng)。
(2) 優(yōu)先權(quán)原則:將任務(wù)賦予優(yōu)先權(quán),在處理任務(wù)時(shí),按優(yōu)先級(jí)的高低排序,優(yōu)先響應(yīng)優(yōu)先權(quán)最高的任務(wù)。
(3) 聯(lián)合作業(yè)原則:在有多項(xiàng)出庫和入庫任務(wù)時(shí),適當(dāng)把出庫任務(wù)和入庫任務(wù)進(jìn)行優(yōu)化組合,滿足條件的出庫任務(wù)和入庫任務(wù)組合成聯(lián)合作業(yè),可縮短存取周期,提高存取效率。
(4) 雙板作業(yè)原則:ETV 能夠同時(shí)輸送兩個(gè)5 英尺的集裝箱,在執(zhí)行雙板作業(yè)時(shí),要保證兩個(gè)作業(yè)不能沖突,而且要求不能增加ETV 作業(yè)時(shí)間。
(5) 兩臺(tái)ETV 避讓原則:如果ETV 在執(zhí)行任務(wù)時(shí),另一臺(tái)ETV 停在本臺(tái)ETV 執(zhí)行任務(wù)的路徑上,就需要另一臺(tái)ETV 先執(zhí)行避讓移動(dòng)操作。在兩臺(tái)ETV 任務(wù)分配時(shí),盡量減少執(zhí)行避讓操作時(shí)間。
(6) 出入庫作業(yè)按比例分配原則:對(duì)于ETV 任務(wù)同時(shí)有入庫和出庫作業(yè)時(shí),可以按比例分配任務(wù),保證出入庫作業(yè)按需求動(dòng)態(tài)調(diào)整。
(7) 倒庫原則:ETV 沒有出入庫、盤庫、直通等作業(yè)時(shí),可以執(zhí)行倒庫操作,倒庫的原則是將貨物盡量移到離ETV 與輸送系統(tǒng)交接臺(tái)比較近的位置。
2.2.2 作業(yè)調(diào)度說明
本文設(shè)計(jì)的機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)調(diào)度方法將整個(gè)巷道劃分為兩個(gè)區(qū)域,每臺(tái)ETV 主要負(fù)責(zé)處理一個(gè)區(qū)域的任務(wù)。當(dāng)作業(yè)任務(wù)集中在一個(gè)區(qū)域內(nèi)或一臺(tái)ETV 不在全自動(dòng)模式時(shí),自動(dòng)調(diào)整ETV 的工作區(qū)域。對(duì)于5 英尺的小箱,ETV 一次可以取兩個(gè)(即雙板作業(yè)),在任務(wù)調(diào)度過程中,本方法能夠?qū)崿F(xiàn)雙板作業(yè)。兩臺(tái)ETV 工作過程中,可能會(huì)出現(xiàn)作業(yè)路徑?jīng)_突,本方法能夠?qū)崿F(xiàn)ETV 自動(dòng)避讓。
本文設(shè)計(jì)的調(diào)度方法說明:(1) ETV 安全距離:兩臺(tái)ETV 在運(yùn)行過程中,需要間隔一定的距離,這個(gè)距離是ETV 設(shè)計(jì)時(shí)的一個(gè)固定參數(shù)。(2) 工作區(qū)域:根據(jù)調(diào)度需要,將巷道劃分為不同的區(qū)域,包括ETV1 主工作區(qū)域、ETV2 主工作區(qū)域、ETV1 增援工作區(qū)域、ETV2 增援工作區(qū)域。(3) ETV 工作狀態(tài):ETV 的工作狀態(tài)分為空閑、取上一個(gè)貨、取上兩個(gè)貨。(4)ETV 任務(wù)類型:ETV 任務(wù)類型包括避讓移動(dòng)、入庫、出庫、直通、倒庫、盤庫,其中盤庫任務(wù)包括盤庫移動(dòng)、盤庫取貨、盤庫放貨3 部分。(5) ETV 出入庫作業(yè)比例:物流系統(tǒng)貨物處理過程中,出庫任務(wù)一般優(yōu)先入庫任務(wù)執(zhí)行,要求出入庫作業(yè)按比例執(zhí)行,比如出入庫按1∶3 執(zhí)行,先執(zhí)行3 個(gè)出庫作業(yè),再執(zhí)行1 個(gè)入庫作業(yè)。根據(jù)作業(yè)任務(wù)情況,出入庫作業(yè)比例可做調(diào)整。直通任務(wù)認(rèn)為是入庫任務(wù),倒庫和盤庫任務(wù)不計(jì)算在出入庫作業(yè)比例中。(6) 作業(yè)任務(wù)優(yōu)先級(jí):ETV 作業(yè)任務(wù)生成時(shí),都有一個(gè)默認(rèn)的優(yōu)先級(jí)別。如果有些任務(wù)比較緊急時(shí),操作員會(huì)調(diào)整作業(yè)的優(yōu)先級(jí)別,將比較緊急的任務(wù)優(yōu)先級(jí)別提高,雖然這些任務(wù)可能是后生成的,但任務(wù)調(diào)度系統(tǒng)會(huì)優(yōu)先將比較緊急的任務(wù)分配給ETV 去執(zhí)行。對(duì)于同一優(yōu)先級(jí)別的任務(wù),按照任務(wù)生成的先后順序執(zhí)行。本文中的優(yōu)先級(jí)是任務(wù)優(yōu)先級(jí)別和生成順序兩項(xiàng)指標(biāo)的綜合值,每條任務(wù)都有唯一的優(yōu)先級(jí)。
2.2.3 知識(shí)庫的建立
知識(shí)庫的建立好壞,直接影響推理機(jī)制的速度及效率。本專家系統(tǒng)知識(shí)庫的建立采用產(chǎn)生式規(guī)則表示法(又稱規(guī)則表示法)。產(chǎn)生式規(guī)則的基本形式是:P-Q 或者IF P THEN Q,其含義是:如果前提P 滿足,則可推出結(jié)論Q 或執(zhí)行Q 所規(guī)定的操作。
根據(jù)以上形式和原則,建立機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)調(diào)度專家系統(tǒng)的知識(shí)庫。
知識(shí)庫中的部分規(guī)則表示如下:R1:IF ETV1 模式為全自動(dòng),THEN 判斷ETV1 的狀態(tài),根據(jù)ETV1 的狀態(tài),給ETV1 分配任務(wù);R2:IF ETV1 狀態(tài)為空閑,THEN 進(jìn)入分配任務(wù)模塊,給ETV1 分配任務(wù);R3:IF ETV1 狀態(tài)為取上一個(gè)貨,THEN 進(jìn)入判斷執(zhí)行雙板作業(yè)模塊,判斷能否執(zhí)行雙板作業(yè);R4:IF ETV1 狀態(tài)為取上兩個(gè)貨,THEN 進(jìn)入判斷先放哪個(gè)貨模塊,判斷先哪個(gè)貨;R5:IF ETV1 有移動(dòng)避讓任務(wù),THEN 判斷能否通過執(zhí)行一條出入庫任務(wù)達(dá)到避讓目的;R6:IF ETV1 能夠通過執(zhí)行一條出入庫任務(wù)達(dá)到避讓目的,THEN 刪除移動(dòng)避讓任務(wù),執(zhí)行出入庫任務(wù);R7:IF ETV1 不能通過執(zhí)行一條出入庫任務(wù)達(dá)到避讓目的,THEN 執(zhí)行移動(dòng)避讓任務(wù);R8:IF ETV1 沒有移動(dòng)避讓任務(wù),THEN 分配其他任務(wù);R9:IF ETV1 有盤庫任務(wù),THEN 判段執(zhí)行盤庫任務(wù)是否需要ETV2 避讓;R10:IF ETV1 執(zhí)行盤庫任務(wù)需要ETV2 避讓,THEN 給ETV2 生成一條避讓任務(wù);R11:IF ETV1 執(zhí)行盤庫任務(wù)不需要ETV2 避讓,THEN ETV1 執(zhí)行盤庫任務(wù);R12:IF ETV1 沒有盤庫任務(wù),THEN 確定ETV1 執(zhí)行任務(wù)的區(qū)域;
……
ETV2 任務(wù)調(diào)度方法和ETV1 類似,系統(tǒng)輪流對(duì)ETV1 和ETV2 的任務(wù)進(jìn)行調(diào)度。
2.3 推理機(jī)制的選擇
推理子系統(tǒng)負(fù)責(zé)整個(gè)專家系統(tǒng)的運(yùn)行,實(shí)現(xiàn)機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)的調(diào)度。其主要工作是:按一定的策略從知識(shí)庫中選擇規(guī)則前提與綜合數(shù)據(jù)庫中的已知事實(shí)進(jìn)行匹配。如果前提與綜合數(shù)據(jù)庫的某條信息一致,則認(rèn)為匹配成功,將結(jié)論加入到綜合數(shù)據(jù)庫,或執(zhí)行前提所得的操作。其正向推理流程框圖如圖3 所示,其工作過程是:先將基本信息輸入綜合數(shù)據(jù)庫,即將綜合數(shù)據(jù)庫初始化,然后從規(guī)則庫中取出第一條規(guī)則R1,檢查其前提是否可與綜合數(shù)據(jù)庫中的已知事實(shí)匹配。如果事實(shí)與R1 前提不匹配,則R1 不參與推理。取出R2 等進(jìn)行同樣的工作,并且一直循環(huán),直到得到最終的結(jié)論。
這種求解過程是一個(gè)不斷地從規(guī)則庫中選取可用規(guī)則與綜合數(shù)據(jù)庫中的已有事實(shí)進(jìn)行匹配,規(guī)則的每一次匹配成功都使綜合數(shù)據(jù)庫增加了新的內(nèi)容,并朝著問題的求解方向前進(jìn)了一步。
2.4 任務(wù)的執(zhí)行
一批任務(wù)的執(zhí)行程序示意圖如圖4 所示。首先根據(jù)ETV 的工作狀態(tài),確定ETV 執(zhí)行什么動(dòng)作,包括取貨、取雙板、放貨等;然后根據(jù)任務(wù)分布情況和另一臺(tái)ETV 工作模式,確定任務(wù)分配范圍和作業(yè)類型,任務(wù)范圍包括主工作區(qū)域和增援工作區(qū)域,作業(yè)類型包括出入庫或其它;再根據(jù)優(yōu)先級(jí)和任務(wù)執(zhí)行條件,確定執(zhí)行哪條任務(wù)。在整個(gè)過程中,任務(wù)調(diào)度分配通過專家系統(tǒng)中推理機(jī)制來確定。
3 算 例
初始化綜合數(shù)據(jù)庫。假設(shè)ETV1 和ETV2 都為全自動(dòng)模式,有3 個(gè)入庫任務(wù),5 個(gè)出庫任務(wù),2 個(gè)倒庫任務(wù)。ETV 的水平速度為0~120m/min(無級(jí)變速),垂直速度為0~20m/min(無級(jí)變速),ETV 每執(zhí)行一次取放操作任務(wù)的時(shí)間為10s。ETV 任務(wù)的相關(guān)參數(shù)如表1。
假設(shè)1~23 列為ETV1 的主工作區(qū)域,24~45 列為ETV2 的主工作區(qū)域,兩臺(tái)ETV 之間的安全距離為4 列,14~23 列為ETV1 的增援區(qū)域,24~32 列為ETV1 的增援區(qū)域,ETV1 的初始位置為3 列,ETV2 的初始位置為28 列,ETV1 和ETV2 都無故障,且在全自動(dòng)模式下,出入庫作業(yè)比例為1∶3。根據(jù)知識(shí)庫中的規(guī)則和推理機(jī)制,計(jì)算機(jī)兩臺(tái)ETV 執(zhí)行表1 中的10 條任務(wù)過程如下:(1) 任務(wù)1 的起始位置為2 列,應(yīng)該由ETV1 來執(zhí)行,但ETV2 在28 列,必須要求ETV2 先執(zhí)行移動(dòng)避讓,ETV1才能執(zhí)行任務(wù)1。(2) 任務(wù)2 的起始位置為6 列,應(yīng)該由ETV1 來執(zhí)行,并且不需要ETV2 執(zhí)行移動(dòng)避讓。(3) 任務(wù)3 的起始位置為32 列,應(yīng)該由ETV2 來執(zhí)行,并且不需要ETV1 執(zhí)行移動(dòng)避讓。(4) 因此,ETV1 執(zhí)行任務(wù)2,同時(shí)ETV2 執(zhí)行任務(wù)3。(5) ETV1 執(zhí)行完任務(wù)2 后,由于按出入庫作業(yè)比例執(zhí)行任務(wù),ETV1 執(zhí)行任務(wù)6。由于任務(wù)6 和任務(wù)7 滿足雙板作業(yè)條件,ETV1 執(zhí)行雙板作業(yè),兩條任務(wù)合計(jì)用時(shí)2 分鐘。(6) ETV2 執(zhí)行完任務(wù)3 后,執(zhí)行任務(wù)8。(7) ETV1 執(zhí)行完任務(wù)6 和7后,執(zhí)行任務(wù)1。(8) ETV2 執(zhí)行完任務(wù)8 后,執(zhí)行任務(wù)9。(9) ETV2 執(zhí)行完任務(wù)9 后,執(zhí)行任務(wù)10。(10) ETV1 執(zhí)行完任務(wù)1 后,執(zhí)行任務(wù)4。(11) ETV2 執(zhí)行完任務(wù)10 后,等待ETV1 執(zhí)行完任務(wù)1 后,執(zhí)行任務(wù)5。
ETV1 執(zhí)行任務(wù)花費(fèi)總時(shí)間為8.2 分鐘,ETV2 執(zhí)行任務(wù)花費(fèi)總時(shí)間為9.1 分鐘,系統(tǒng)花費(fèi)的總時(shí)間為9.1 分鐘。
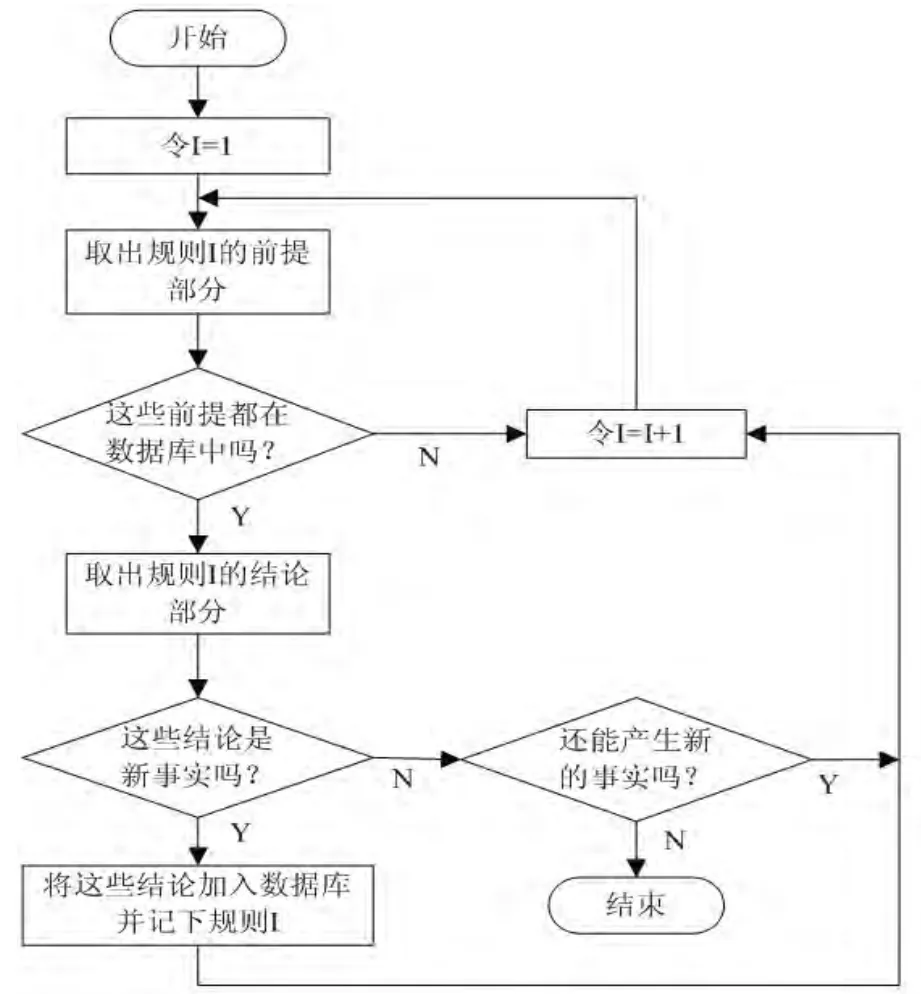
圖3 雙ETV 任務(wù)調(diào)度專家系統(tǒng)正向推理框圖
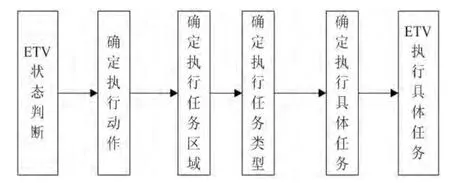
圖4 任務(wù)執(zhí)行過程示意圖
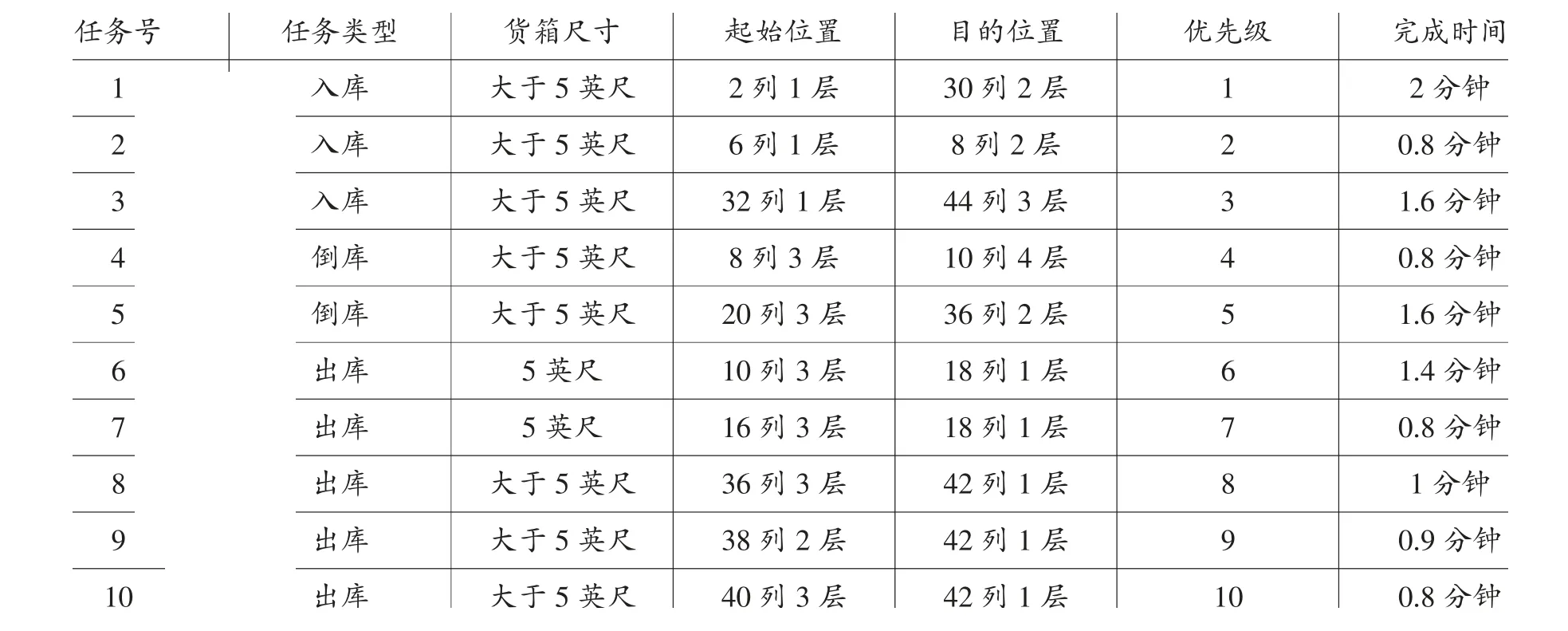
表1 ETV 任務(wù)相關(guān)參數(shù)表
如果不采用本文設(shè)計(jì)的調(diào)度方法,而直接按順序執(zhí)行任務(wù)ETV1 執(zhí)行任務(wù)花費(fèi)總時(shí)間為10.4 分鐘,ETV2 執(zhí)行任務(wù)花費(fèi)總時(shí)間為8.5 分鐘,系統(tǒng)花費(fèi)的總時(shí)間為10.4 分鐘。因此,采用直接按順序執(zhí)行任務(wù)的方法,不僅耗時(shí)比較長(zhǎng),而且不能滿足實(shí)際需求。一般情況下,出庫任務(wù)比較緊急,如果按順序直接執(zhí)行任務(wù),任務(wù)7 的完成時(shí)間遠(yuǎn)遠(yuǎn)大于本文所采用的方法的時(shí)間。
4 結(jié) 論
本文運(yùn)用基于規(guī)則的專家系統(tǒng)的方法,分析了機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)調(diào)度問題,建立了專家系統(tǒng)的知識(shí)庫和推理機(jī)制,編制了算法程序,實(shí)現(xiàn)了基于專家系統(tǒng)的機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)調(diào)度。通過算例結(jié)果分析對(duì)比,表明基于專家系統(tǒng)的機(jī)場(chǎng)貨運(yùn)站雙ETV 任務(wù)調(diào)度方法能夠較好地解決復(fù)雜的任務(wù)調(diào)度,較好地提高系統(tǒng)的作業(yè)效率。
[1] 常發(fā)亮,劉增曉,辛征,等. 自動(dòng)化立體倉庫揀選作業(yè)路徑優(yōu)化問題研究[J]. 系統(tǒng)工程理論與實(shí)踐,2007,27(2):139-143.
[2] 李梅娟,陳雪波. Pareto 遺傳算法在貨位配置中的應(yīng)用研究[J]. 控制工程,2006,13(2):138-140,144.
[3] 柳賽男,柯映林,李江雄,等. 基于調(diào)度策略的自動(dòng)化倉庫系統(tǒng)優(yōu)化問題研究[J]. 計(jì)算機(jī)集成制造系統(tǒng),2006,12(9):1438-1443.
[4] 徐香玲,傅衛(wèi)平,李德信,等. 基于專家系統(tǒng)的自動(dòng)化立體倉庫出入庫調(diào)度研究[J]. 物流技術(shù),2005(2):38-40,51.
[5] 曾明如,游文堂,錢信,等. 基于專家系統(tǒng)的貨位管理與作業(yè)調(diào)度優(yōu)化[J]. 南昌大學(xué)學(xué)報(bào)(工科版),2009,31(4):385-388.
[6] 張?jiān)葡? 機(jī)場(chǎng)貨運(yùn)站監(jiān)控系統(tǒng)多任務(wù)調(diào)度策略的研究與仿真[D]. 蘭州:蘭州交通大學(xué)(碩士學(xué)位論文),2011.
[7] 趙亮,宋宇博,蔣兆遠(yuǎn). BP 神經(jīng)網(wǎng)絡(luò)在機(jī)場(chǎng)貨運(yùn)站生產(chǎn)調(diào)度中的應(yīng)用[J]. 起重運(yùn)輸機(jī)械,2009(11):39-42.
猜你喜歡
小主人報(bào)(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級(jí)版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級(jí)適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08