基于MSER的無(wú)人機(jī)圖像建筑區(qū)域提取
2015-12-20 05:30:32丁文銳康傳波李紅光劉碩
北京航空航天大學(xué)學(xué)報(bào) 2015年3期
丁文銳,康傳波,李紅光,劉碩
(1.北京航空航天大學(xué) 無(wú)人駕駛飛行器設(shè)計(jì)研究所,北京100191;2.北京航空航天大學(xué) 電子信息工程學(xué)院,北京100191)
近年來(lái),隨著技術(shù)的不斷發(fā)展,無(wú)人機(jī)廣泛應(yīng)用在軍事和民用領(lǐng)域.建筑區(qū)域?qū)τ跓o(wú)人機(jī)而言,是一類重要的感興趣目標(biāo),一方面對(duì)其快速檢測(cè),是無(wú)人機(jī)完成導(dǎo)航、偵察、監(jiān)測(cè)等任務(wù)的基礎(chǔ)和重要內(nèi)容;另一方面,無(wú)人機(jī)在出現(xiàn)故障等緊急情況時(shí),通過(guò)對(duì)建筑區(qū)域進(jìn)行準(zhǔn)確檢測(cè)并及時(shí)規(guī)避,從而極大地減少或避免人員傷亡和財(cái)產(chǎn)損失.
與現(xiàn)有文獻(xiàn)針對(duì)的SAR圖像、高光譜圖像及航空數(shù)碼圖像不同,無(wú)人機(jī)機(jī)載CCD攝像機(jī)拍攝的中低航空高度圖像,主要具有以下特征:
1)在空間分布方面,無(wú)人機(jī)可拍攝的地域廣闊;
2)從獲取時(shí)間上,不同時(shí)間可獲取的無(wú)人機(jī)圖像會(huì)受到不同氣象條件的影響;
3)從建筑區(qū)域在圖像中的特性而言,建筑區(qū)內(nèi)部及周圍紋理復(fù)雜,部分地區(qū)建筑分布不規(guī)則,區(qū)域整體沒(méi)有明顯的方向性,不利于紋理特征的檢測(cè).
目前,建筑區(qū)域提取的方法主要分為基于監(jiān)督學(xué)習(xí)的方法和基于特征統(tǒng)計(jì)的方法.基于監(jiān)督學(xué)習(xí)的方法主要是融合多種特征訓(xùn)練分類器,從而完成圖像區(qū)域分類和建筑區(qū)域提取.文獻(xiàn)[1]提出一種知識(shí)規(guī)則與支持向量機(jī)(SVM,Support Vector Machine)相結(jié)合的面向?qū)ο蠼ㄖ锾崛》椒?文獻(xiàn)[2]利用多核SVM學(xué)習(xí),綜合多種特征,并設(shè)計(jì)基于圖割的算法提高邊界分割精細(xì)程度.這類方法需要人工確定合適的訓(xùn)練特征和分類類別,并且訓(xùn)練樣本的選取對(duì)分類結(jié)果具有很大影響.無(wú)人機(jī)執(zhí)行任務(wù)的地域廣闊,不同的地域圖像特征差異較大及工況條件復(fù)雜,以現(xiàn)有無(wú)人機(jī)圖像作為樣本訓(xùn)練得到的分類器,往往不能適應(yīng)實(shí)際應(yīng)用需求.
基于特征統(tǒng)計(jì)的方法,利用多種特征進(jìn)行統(tǒng)計(jì)分析,從而判斷圖像中的建筑區(qū)域.文獻(xiàn)[3]利用SIFT特征、多模版匹配和圖論的方法進(jìn)行檢測(cè),取得一定效果,但是時(shí)間復(fù)雜度高,并且當(dāng)房屋屋頂與背景對(duì)比度不高以及房屋密度過(guò)于集中的情況下,檢測(cè)結(jié)果不理想;文獻(xiàn)[4]利用地面高程模型(DSM,Digital Surface Model)和光譜信息排除非建筑物,該方法依賴DSM高度等信息,應(yīng)用范圍狹窄;文獻(xiàn)[5]利用知識(shí)規(guī)則,依靠幾何、灰度及拓?fù)涮卣鲗?duì)建筑物進(jìn)行描述,并不能適應(yīng)多種多樣的建筑;文獻(xiàn)[6]利用直線檢測(cè)形成屋頂矩形幾何形狀結(jié)合亮度信息,綜合紋理特征的SVM噪點(diǎn)去除,但該方法在直線特征復(fù)雜及對(duì)比度低的場(chǎng)景具有局限性.在基于特征統(tǒng)計(jì)的方法中,利用紋理進(jìn)行建筑區(qū)域檢測(cè)的方法是國(guó)內(nèi)外研究學(xué)者關(guān)注的重點(diǎn).由于Gabor濾波器兼具方向性和紋理分析的優(yōu)點(diǎn),研究者提出了多種基于Gabor紋理描述的建筑區(qū)域檢測(cè)方法.文獻(xiàn)[7]利用Gabor濾波器提取圖像特征,再使用最優(yōu)決策分類方法,取得了較文獻(xiàn)[3]相似的性能,大大減少了計(jì)算時(shí)間;文獻(xiàn)[8]利用核密度估計(jì)生成居民區(qū)置信圖像并計(jì)算自適應(yīng)閾值分割置信圖,對(duì)候選區(qū)幾何形狀進(jìn)行選擇,較文獻(xiàn)[7]方法計(jì)算效率更高,但由于光照視角等因素影響,某些地質(zhì)區(qū)域會(huì)呈現(xiàn)居民區(qū)域相似紋理,導(dǎo)致準(zhǔn)確度下降.紋理特征提取尺度參數(shù)仍需依據(jù)經(jīng)驗(yàn)值給定,缺乏自適應(yīng)性,并且無(wú)人機(jī)圖像中建筑區(qū)內(nèi)部紋理復(fù)雜,紋理特征往往不具備明顯主方向,影響檢測(cè)效果;同時(shí),在無(wú)人機(jī)中低空偵察圖像中,道路、草地、水域等紋理對(duì)建筑區(qū)紋理的提取形成很大干擾.
基于上述分析,利用紋理、監(jiān)督訓(xùn)練等方法對(duì)無(wú)人機(jī)中低空偵察圖像進(jìn)行建筑區(qū)域檢測(cè)并不能完全滿足要求.注意到,無(wú)人機(jī)圖像中建筑區(qū)域表現(xiàn)出高亮性和團(tuán)聚性,主要是由于自然背景的光反射能力較弱,使得人造區(qū)域的亮度值較大,形成局部高亮,同時(shí)會(huì)團(tuán)聚成具有一定面積大小、分布集中的區(qū)域.本文結(jié)合無(wú)人機(jī)實(shí)際應(yīng)用需求,從無(wú)人機(jī)圖像中建筑區(qū)域的高亮性和團(tuán)聚性出發(fā),利用最大穩(wěn)定極值區(qū)域(MSER,Maximum Stable Extremal Regions)檢測(cè)建筑物,并根據(jù)局部房屋密度去除噪點(diǎn),采用自適應(yīng)K均值聚類算法得到聚集的若干建筑區(qū)域,最后采用Graham算法生成建筑區(qū)邊界,從而實(shí)現(xiàn)建筑區(qū)域的自動(dòng)快速提取.
1 最大穩(wěn)定極值區(qū)域提取算法
Matas等[9]所提出的最大穩(wěn)定極值區(qū)域主要基于魯棒性的寬基線立體重建,使用地形中分水嶺的概念來(lái)求解穩(wěn)定局部區(qū)域.文獻(xiàn)[10]證明,MSER檢測(cè)算子在眾多仿射不變特征區(qū)域檢測(cè)中,多數(shù)情況下具有最佳性能.實(shí)驗(yàn)證明,該方法具有仿射變化不變性、良好的穩(wěn)定性、計(jì)算簡(jiǎn)單高效,并且可以檢測(cè)不同精細(xì)程度的區(qū)域.其基本思想如下:選取一系列閾值 t={0,1,…,255}對(duì)圖像進(jìn)行二值分割,低于閾值的像素置為黑色,高于或等于閾值的像素置為白色.在閾值t從0增大到255的過(guò)程中,圖像中會(huì)形成閉合區(qū)域,其中在一定閾值范圍內(nèi)面積變化最小的區(qū)域即為最大極值穩(wěn)定區(qū)域.
最大穩(wěn)定極值穩(wěn)定區(qū)域提取算法步驟包括以下幾個(gè)步驟[11].
1.1 MSER 檢測(cè)
1)對(duì)給定的圖像根據(jù)灰度值排序,如果是彩色圖像,需要將彩色圖像轉(zhuǎn)換成灰度圖像
2)按照降序或升序?qū)⑴判蚝蟮南袼胤湃雸D像中,鏈接區(qū)域的列表和面積使用高效的合并-查找(UnionFind)[12]算法來(lái)維護(hù).
3)Qi表示二值化閾值對(duì)應(yīng)的二值圖像中的任意連通區(qū)域,當(dāng)二值化閾值在[i-Δ,i+Δ]變化時(shí),連通區(qū)域也相應(yīng)地變?yōu)?Qi+Δ和 Qi-Δ.在這個(gè)變化范圍內(nèi)具有極小變化率q(i)區(qū)域就被認(rèn)為是MSER.
為了能同時(shí)得到最小灰度(即黑色)和最大灰度(即白色)的MSER,在求得最小灰度MSER+后,需要將原始圖像進(jìn)行反轉(zhuǎn):Ir=Imax-I,再利用反轉(zhuǎn)后的圖像求取最大灰度的MSER-.
1.2 MSER區(qū)域擬合及歸一化
完成圖像中MSER的區(qū)域檢測(cè)后,不規(guī)則區(qū)域不便于進(jìn)行歸一化和提取特征描述,必須對(duì)它們進(jìn)行橢圓擬合.為了能夠構(gòu)造具有仿射不變性的特征描述子,首先將MSER對(duì)應(yīng)的橢圓擬合區(qū)域擴(kuò)大成抽取特征用的橢圓特征測(cè)量區(qū),測(cè)量區(qū)與擬合區(qū)同中心,一般測(cè)量區(qū)尺度是擬合區(qū)尺度的3倍.然后將測(cè)量區(qū)歸一化為指定大小的區(qū)域(成為歸一化區(qū)),再在歸一化區(qū)的圖像上提取特征描述子.區(qū)域歸一化的方法主要包括3步[13]:
1)將MSER擬合區(qū)對(duì)應(yīng)的測(cè)量區(qū)進(jìn)行仿射歸一化,得到一個(gè)半徑指定大小的歸一化區(qū),歸一化區(qū)的半徑尺寸為20~30像素.
2)在歸一化區(qū)內(nèi)進(jìn)行圖像梯度直方圖統(tǒng)計(jì),其目的是找出該直方圖的最大值,并將該最大值對(duì)應(yīng)的方向作為歸一化區(qū)圖像梯度的主方向.
3)根據(jù)主方向?qū)w一化區(qū)圖像再進(jìn)行旋轉(zhuǎn)歸一化,旋轉(zhuǎn)后圖像的梯度主方向?yàn)榱愣?
2 建筑區(qū)域提取算法
2.1 方法框架和流程
如圖1所示,本方法的總體思路為:首先對(duì)無(wú)人機(jī)航拍圖像進(jìn)行預(yù)處理,去除模糊,然后利用MSER算法提取建筑房屋,進(jìn)而計(jì)算每個(gè)房屋中心點(diǎn)鄰域內(nèi)的房屋密度,房屋密度較低的區(qū)域被認(rèn)為是干擾點(diǎn)予以剔除,完成點(diǎn)的選擇與濾波后,再利用自適應(yīng)K均值聚類算法,將離散點(diǎn)聚成若干建筑區(qū),最后采用Graham算法,生成每個(gè)建筑區(qū)的包絡(luò),完成建筑區(qū)的自動(dòng)提取與標(biāo)記,并在最后輸出區(qū)域的數(shù)量K,若為K=0,則表示不存在建筑區(qū).
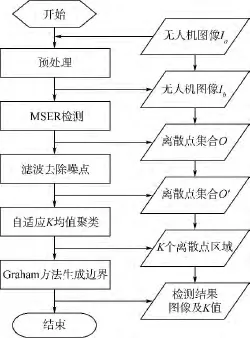
圖1 算法流程圖Fig.1 Algorithm flow chart
2.2 算法原理
2.2.1 無(wú)人機(jī)圖像預(yù)處理
無(wú)人機(jī)圖像容易受不同氣象條件的影響,尤其在霧天等不良天氣狀況下拍攝的圖像模糊不清,圖像質(zhì)量差,導(dǎo)致提取的特征數(shù)量較少,給建筑區(qū)域檢測(cè)帶來(lái)影響.為了使算法既簡(jiǎn)潔又高效,采用直方圖均衡和GAMMA調(diào)節(jié)對(duì)圖像進(jìn)行預(yù)處理,擴(kuò)展圖像的動(dòng)態(tài)范圍,同時(shí)增強(qiáng)圖像的亮度,實(shí)驗(yàn)表明經(jīng)過(guò)預(yù)處理之后,檢測(cè)的特征數(shù)量明顯增加,進(jìn)一步提高建筑區(qū)的可分辨性.預(yù)處理前后的結(jié)果對(duì)比如圖2和圖3所示.

圖2 原始圖像Fig.2 Initial image

圖3 預(yù)處理后的圖像Fig.3 Preprocessed image
2.2.2 最大穩(wěn)定極值區(qū)域檢測(cè)
屋頂?shù)热嗽煳矬w,光反射能力比自然背景更加強(qiáng)烈,呈現(xiàn)團(tuán)塊高亮特點(diǎn),如圖4所示,每個(gè)圖對(duì)應(yīng)的下方圖像為其二值化圖像,對(duì)比度高,并且在一定閾值范圍內(nèi)面積變化最小,符合MSER特征.
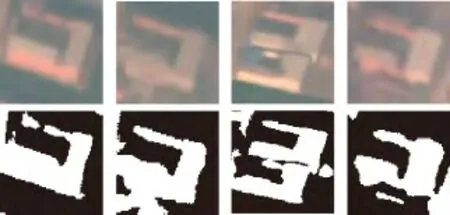
圖4 單個(gè)房屋特征Fig.4 Features of single house
利用第1節(jié)所述最大穩(wěn)定極值區(qū)域提取算法,計(jì)算并標(biāo)記圖像穩(wěn)定區(qū)域,數(shù)量為1 358個(gè)區(qū)域,圖5中橢圓標(biāo)注的區(qū)域?yàn)榉€(wěn)定區(qū)域MSER+,圖6中橢圓標(biāo)注的區(qū)域?yàn)榇韴D像反轉(zhuǎn)后得到的穩(wěn)定區(qū)域MSER-.
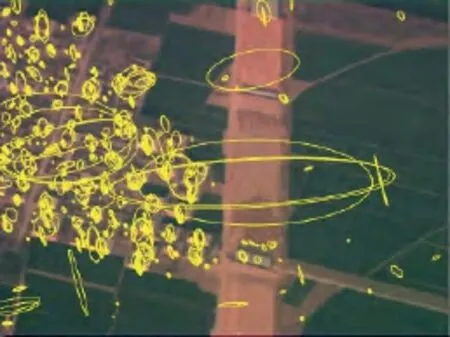
圖5 MSER+區(qū)域Fig.5 MSER+area

圖6 MSER-區(qū)域Fig.6 MSER-area
為了確定圖像中建筑房屋的大小,還需知道圖像的像素地面分辨率,在垂直下視的情況下,無(wú)人機(jī)高度為H(單位:m),拍攝的圖像大小為w×h(單位:像素),攝像機(jī)的視角為水平 α×垂直β(單位:°),計(jì)算方法如式(1)~式(4).選取實(shí)飛圖像數(shù)據(jù),飛行高度為5 km,攝像機(jī)視場(chǎng)角為14.38°× 10.59°,圖像大小為1392像素×1040像素,像素地面分辨率計(jì)算如圖7所示.水平距離 =2×5 000×tan(7.19)=1 261.15 m=1392像素,因?yàn)?個(gè)像素≈0.906m,同樣,垂直方向:1個(gè)像素≈0.891 m.
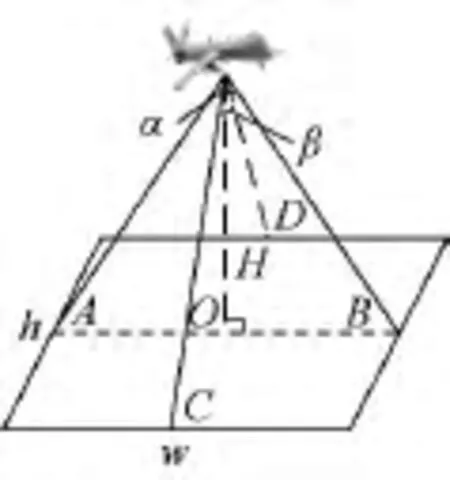
圖7 像素地面分辨率計(jì)算Fig.7 Calculation of ground pixel resolution
式中,Lhor,Lver分別表示水平和垂直距離;Phor,Pver分別表示水平和垂直方向上單位像素的實(shí)際地理距離.
郊區(qū)或農(nóng)村房屋的面積S一般在30~200 m2,根據(jù)圖7計(jì)算的像素地面分辨率結(jié)果可知,在圖像中一間房屋長(zhǎng)度和寬度所占像素個(gè)數(shù)的范圍分別在[8,20]和[5,12]之間,以此限定MSER檢測(cè)的穩(wěn)定區(qū)域大小,檢測(cè)結(jié)果如圖8所示.

圖8 建筑區(qū)域檢測(cè)Fig.8 Building area detection
2.2.3 基于區(qū)域密度的建筑區(qū)篩選方法
在實(shí)際圖像中,MSER所檢測(cè)得到的最大穩(wěn)定極值區(qū)域并不都是建筑區(qū),如圖7所示,田野中也存在部分最大穩(wěn)定極值區(qū)域,形成干擾.鑒于通過(guò)平滑濾波或無(wú)重疊框遍歷圖像的方法來(lái)排除干擾不夠準(zhǔn)確,本方法利用建筑區(qū)特征豐富密集的特點(diǎn),通過(guò)計(jì)算最大穩(wěn)定極值區(qū)域密度篩選出建筑區(qū).
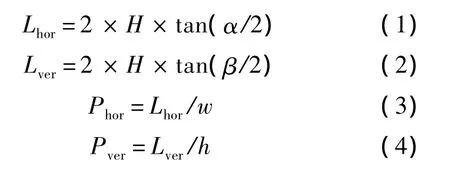
確定MSER檢測(cè)的最大穩(wěn)定極值區(qū)域的中心,并用來(lái)代替最大穩(wěn)定極值區(qū)域計(jì)算區(qū)域密度.如圖9所示,黑點(diǎn)代表特征區(qū)域,白色為背景.采用m×m大小的窗口,依次計(jì)算每個(gè)特征位置(x,y)的區(qū)域密度 f(x,y).
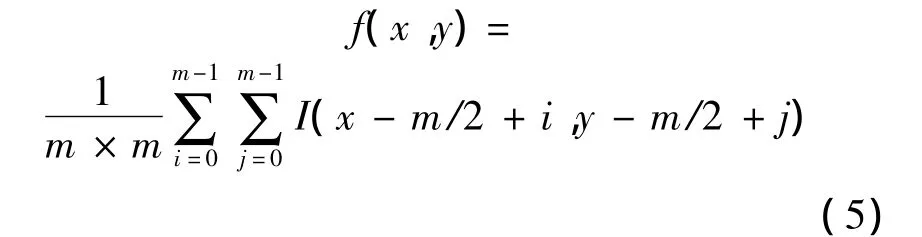
圖9 建筑區(qū)檢測(cè)點(diǎn)Fig.9 Detected points of building area
圖10 濾波去除噪點(diǎn)Fig.10 Filter to remove noise
2.2.4 自適應(yīng)K均值聚類
因?yàn)榫奂院头秩憾拥奶攸c(diǎn),同一幅圖像中可能出現(xiàn)多個(gè)聚集的建筑區(qū)域,為了準(zhǔn)確標(biāo)記建筑區(qū),需要對(duì)上述特征區(qū)域中心點(diǎn)進(jìn)行聚類.K均值聚類算法[14]處理這種聚類問(wèn)題簡(jiǎn)單高效,但是無(wú)人機(jī)圖像中建筑區(qū)域的個(gè)數(shù)并不確定,因此無(wú)法自動(dòng)確定算法的參數(shù).由于無(wú)人機(jī)視場(chǎng)較小,在單幅無(wú)人機(jī)圖像中,出現(xiàn)的建筑區(qū)域個(gè)數(shù)并不會(huì)太多,因此本文在K均值算法的基礎(chǔ)上提出了一種自適應(yīng)策略,給定K一個(gè)較大的初始值K=6,從而達(dá)到自動(dòng)確定建筑區(qū)數(shù)量的目的.具體流程如圖11所示.
圖11 自適應(yīng)K均值聚類計(jì)算流程圖Fig.11 Flow chart of adaptive K-means clustering calculation
限于圖像實(shí)際地理范圍,給定初始K值為6,自適應(yīng)聚類步驟如下:
1)利用 K均值聚類算法,對(duì)離散點(diǎn)進(jìn)行聚類;
2)分別計(jì)算K個(gè)區(qū)域的中心點(diǎn);
3)K個(gè)區(qū)域兩兩組合,如圖12所示,計(jì)算區(qū)域間最短距離CD;
4)若距離CD>V或者K=1,則認(rèn)為全部都是獨(dú)立區(qū)域,否則K值減1,繼續(xù)循環(huán)計(jì)算,閾值V的選取根據(jù)像素所代表的實(shí)際距離計(jì)算,V=,按照?qǐng)D7條件,V值取150.
基于此方法,對(duì)圖10處理結(jié)果為K=1,存在一個(gè)建筑區(qū).
圖12 區(qū)域間距離計(jì)算方法Fig.12 Calculation methods of distance between areas
2.2.5 生成建筑區(qū)包絡(luò)
根據(jù)2.2.4節(jié)得到的K個(gè)離散區(qū)域,采用經(jīng)典的Graham算法[15]生成建筑區(qū)凸殼包絡(luò),該算法為最優(yōu)凸殼算法,時(shí)間復(fù)雜度約為O(nlogn).
Graham算法的基本思想是:以y坐標(biāo)最小點(diǎn)為初始點(diǎn)P1,計(jì)算該點(diǎn)與其他點(diǎn)連線的水平夾角,按夾角大小和到初始點(diǎn)P1的距離進(jìn)行排序,得到一系列點(diǎn)集合 P={P1,P2,…,Pn},其中Pn+1=P1,對(duì)點(diǎn)集合{P1,P2,…,Pn,Pn+1}依據(jù)凸多邊形的各頂點(diǎn)必在該多邊形的任意一條邊的同一側(cè)的方法原理,刪除不屬于凸殼上的點(diǎn),得到新的點(diǎn)集合P′={P1,P2,…,Pm},最后根據(jù)點(diǎn)集合 P′標(biāo)記邊界,實(shí)現(xiàn)建筑區(qū)的自動(dòng)提取,效果如圖13所示.

圖13 建筑區(qū)包絡(luò)圖Fig.13 Envelop of building area
3 實(shí)驗(yàn)結(jié)果與分析
對(duì)部分圖像人工標(biāo)注出建筑區(qū)域作為基準(zhǔn)數(shù)據(jù),并將提取結(jié)果與人工標(biāo)注結(jié)果相比較.圖14展示了不同測(cè)試數(shù)據(jù)的提取結(jié)果.

圖14 測(cè)試結(jié)果Fig.14 Experiment results
從圖14直觀上看,人工標(biāo)記的結(jié)果與自動(dòng)提取的結(jié)果大體上比較接近,由于Graham算法是凸包算法,只能生成區(qū)域凸殼,因此人工標(biāo)注結(jié)果與自動(dòng)提取結(jié)果有部分位置的偏差.為了更好地描述算法效果,采用無(wú)人機(jī)圖像數(shù)據(jù)集,對(duì)自動(dòng)提取的像素?cái)?shù)目做統(tǒng)計(jì),并以人工提取的像素?cái)?shù)目作為標(biāo)準(zhǔn),統(tǒng)計(jì)準(zhǔn)確率、誤檢率和漏檢率及時(shí)間性能.本文進(jìn)行兩個(gè)方面的測(cè)試:一方面是MSER性能分析;另一方面是分析圖像預(yù)處理和自適應(yīng)K均值聚類方法對(duì)結(jié)果的影響.
本方法以無(wú)人機(jī)中低空偵察圖像集為對(duì)象,無(wú)人機(jī)高度為5 km,攝像機(jī)視場(chǎng)角為14.38×10.59°,圖像大小為 1 392像素 ×1 040像素,實(shí)驗(yàn)計(jì)算機(jī)配置為Intel Core 2 Duo雙核處理器,主頻2.20 GHz,內(nèi)存 2.00 GB,平臺(tái)為 Microsoft Visual C++6.0.
3.1 MSER性能分析
基于特征統(tǒng)計(jì)的建筑區(qū)域提取方法中,利用DSM、光譜等信息有自身應(yīng)用的局限性,而根據(jù)SIFT、紋理特征有更為廣泛的適用性.本部分討論MSER算法相比基于Gabor變換的紋理特征、SIFT特征點(diǎn)的提取算法的時(shí)間性能分析,Gabor濾波器選擇4方向,設(shè)定濾波窗口大小為尺度為5×5.
時(shí)間性能方面,如表1所示,針對(duì)大小為1392像素 ×1 040像素的圖像集做特征檢測(cè),MSER算法平均檢測(cè)1 358個(gè)特征區(qū)域耗時(shí)1.092 s,SIFT算法平均檢測(cè)1 175個(gè)特征點(diǎn)耗時(shí)3.073 s,紋理特征檢測(cè)算法平均耗時(shí) 2.509 s.因此,在相同特征點(diǎn)數(shù)量的情況下,MSER算法時(shí)間性能優(yōu)于SIFT,在圖像大小相同的情況下,MSER算法優(yōu)于紋理檢測(cè)方法,計(jì)算簡(jiǎn)單高效.
表1 特征檢測(cè)方法分析Table1 Analysis of feature detection methods
3.2 實(shí)驗(yàn)結(jié)果分析
表2為本算法提取結(jié)果,采取4組圖像集測(cè)試,共3722個(gè)建筑數(shù)量,平均正確率達(dá)到92.25%,誤檢率也較低.同時(shí),分析對(duì)比有無(wú)圖像預(yù)處理和自適應(yīng)K均值聚類兩部分的算法結(jié)果,如表3所示,實(shí)驗(yàn)1為本文算法結(jié)果,實(shí)驗(yàn)2為沒(méi)有圖像預(yù)處理的提取結(jié)果,實(shí)驗(yàn)3代表了沒(méi)有自適應(yīng)K均值聚類的提取結(jié)果.實(shí)驗(yàn)1和2對(duì)比,在沒(méi)有預(yù)處理的情況下,雖然時(shí)間性能得到提高僅有0.06s,但正確率下降了3.5%同時(shí)造成誤檢率上升;實(shí)驗(yàn)1和3對(duì)比,自適應(yīng)K均值聚類對(duì)正確率和漏檢率基本無(wú)影響,但有效降低了誤檢率,非自適應(yīng)K均值聚類的情況下,雖然運(yùn)算時(shí)間減少了 0.02s(約 1.69%),但誤檢率高.
表2 算法提取結(jié)果分析Table2 Analysis of algorithm extraction results
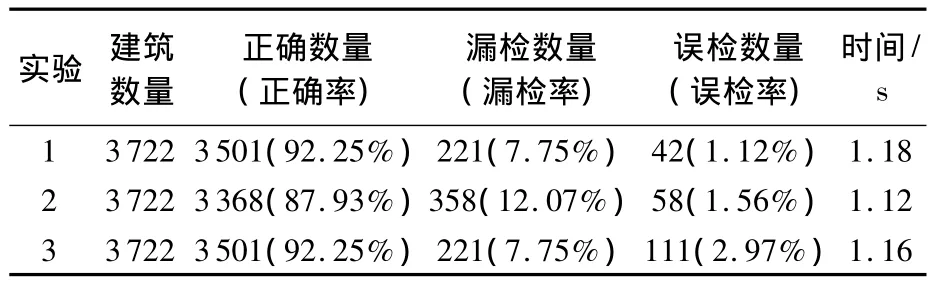
表3 提取結(jié)果對(duì)比分析Table3 Comparison analysis of extraction results
因此,本方法在保證時(shí)間性能的前提下取得了較高的正確檢測(cè)率,大多數(shù)圖像中的建筑區(qū)域能夠被檢出.另外,也會(huì)造成區(qū)域漏檢和誤檢,例如只檢測(cè)出部分區(qū)域的情況,造成區(qū)域的漏檢,以及檢測(cè)出不屬于建筑區(qū)的區(qū)域,造成誤檢,但漏檢率和誤檢率比較低.這種情況的發(fā)生,主要是因?yàn)槿舾山ㄖ^(qū)域面積較小不易被檢出,或者居民區(qū)距離較近,此時(shí)居民區(qū)之間的空地被連入建筑區(qū)范圍內(nèi),造成誤檢,誤檢率在1.1%左右.文獻(xiàn)[8-9]中使用紋理檢測(cè)原理檢測(cè)建筑區(qū),使用中低分辨率圖像,圖像大小為235像素×265像素,算法耗時(shí)分別為1.99 s和0.42 s,本文算法使用1392像素×1 040像素大小圖像耗時(shí)1.18 s.綜上所述,相比SIFT和紋理檢測(cè)方法,本算法耗時(shí)較短,處理效率較高.
4 結(jié)論
通過(guò)分析計(jì)算,現(xiàn)得出結(jié)論如下:
1)最大穩(wěn)定極值區(qū)域提取算法具有良好的穩(wěn)定性,計(jì)算簡(jiǎn)單高效;
2)將MSER檢測(cè)結(jié)果與區(qū)域大小、密度計(jì)分布特征相結(jié)合,采用自適應(yīng)K均值聚類的方法可穩(wěn)定地提取建筑區(qū)域.
實(shí)驗(yàn)數(shù)據(jù)表明,該方法提取精度為92.25%,具有較好的準(zhǔn)確率,有效可行.但是,該算法采用Graham算法生成的凸殼邊界較為簡(jiǎn)單,這也是造成誤檢率很重要的一個(gè)原因;另外,在森林地區(qū)由于樹(shù)木之間的遮擋造成局部存在穩(wěn)定區(qū)域,對(duì)建筑區(qū)域檢測(cè)提取造成誤擾.如何改進(jìn)邊界生成的方法和增強(qiáng)本文算法魯棒性是日后工作的重點(diǎn)和方向.
References)
[1] 劉海飛,常慶瑞,李粉玲.高分辨率影像城區(qū)建筑物提取研究[J].西北農(nóng)林科技大學(xué)學(xué)報(bào):自然科學(xué)版,2013,41(10):221-227.Liu H F,Chang Q R,Li F L.Urban building extraction of highresolution images[J].Northwest Agriculture and Forestry University of Science and Technology:Natural Science Edition,2013,41(10):221-227(in Chinese).
[2] Tao C,Tan Y H,Yu J G,et al.Urban area detection using multiple Kernel Learning and graph cut[C]//2012 32nd IEEE International Geoscience and Remote Sensing Symposium.Piscataway,NJ:IEEE,2012:83-86.
[3] Sirmacek B,Unsalan C.Urban-area and building detection using SIFT keypoints and graph theory[J].Geoscience and Remote Sensing,IEEE Transactions on,2009,47(4):1156-1167.
[4] 張立民,張建廷,徐濤.基于對(duì)象的最優(yōu)尺度建筑物信息提取方法[J].計(jì)算機(jī)應(yīng)用研究,2012,29(12):4789-4792.Zhang L M,Zhang J T,Xu T.Object-based of optimal scale building information extraction method[J].Application Research of Computers,2012,29(12):4789-4792(in Chinese).
[5] 黃金庫(kù),馮險(xiǎn)峰,徐秀莉,等.基于知識(shí)規(guī)則構(gòu)建和形態(tài)學(xué)修復(fù)的建筑物提取研究[J].地理與地理信息科學(xué),2011,27(4):28-31.Huang J K,F(xiàn)eng X F,Xu X L,et al.Building extraction based on knowledge rule and morphological restoration[J].Geography and Geo-Information Science,2011,27(4):28-31(in Chinese).
[6] 楊萍,姜志國(guó),劉濱濤.一種遙感圖像建筑物檢測(cè)新方法[J].航天返回與遙感,2013,34(5):70-77.Yang P,Jiang Z G,Liu B T.A new building detection method in remote sensing image[J].Aerospace & Remote Sensing,2013,34(5):70-77(in Chinese).
[7] Sirmacek B,Unsalan C.Urban area detection using local feature points and spatial voting[J].IEEE Geoscience and Remote Sensing Letters,2010,7(1):146-150.
[8] 谷多玉,郭江,李書曉,等.基于Gabor濾波器的航空?qǐng)D像居民區(qū)域提取[J].北京航空航天大學(xué)學(xué)報(bào),2012,38(1):106-110.Gu D Y,Guo J,Li S X,et al.Resident region extraction using Gabor filter in aerial imagery[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(1):106-110(in Chinese).
[9] Matas J,Chum O,Urban M,et al.Robust wide-baseline stereo from maximally stable extremal regions[J].Image and Vision Computing,2004,22(10):761-767.
[10] Mikolajczyk K,Tuytelaars T,Schmid C,et al.A comparison of affine region detectors[J].International Journal of Computer Vision,2005,65(1-2):43-72.
[11] 王永明,王貴錦.圖像局部不變性特征與描述[M].北京:國(guó)防工業(yè)出版社,2010:102-127.Wang Y M,Wang G J.Image local invariant features and description[M].Beijing:Defense Industry Press,2010:102-127(in Chinese).
[12] Murphy-Chutorian E,Trivedi M.N-tree disjoint-set forests for maximally stable extremal regions[C]//2006 17th British Machine Vision Conference.Edinburgh,United Kingdom:British Machine Vision Association,2006:739-748.
[13] Mikolajczyk K,Schmid C.A performance evaluation of local descriptors[J].Pattern Analysis and Machine Intelligence,IEEE Transactions on,2005,27(10):1615-1630.
[14] MacQueen J.Some methods for classification and analysis of multivariate observations[C]//Proceedings of the fifth Berkeley Symposium on Mathematical Statistics and Probability.Berkeley,California:University of California Press,1967:281-297.
[15] Graham R L.An efficient algorithm for determining the convex hull of a finite planar set[J].Information Processing Letters,1972,1(4):132-133.
猜你喜歡
北方建筑(2021年6期)2021-12-31 03:03:54
文苑(2020年10期)2020-11-07 03:15:36
現(xiàn)代裝飾(2020年6期)2020-06-22 08:43:12
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
少兒科學(xué)周刊·兒童版(2015年6期)2015-11-24 03:49:38
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
