非光滑表面加工機器人建模及熱輥壓工藝研究
2015-12-30 03:19:49谷云慶,趙剛,于偉波等
振動與沖擊 2015年3期
第一作者谷云慶男,博士,講師,1982年生
通信作者趙剛男,教授,1957年生
非光滑表面加工機器人建模及熱輥壓工藝研究
谷云慶1,趙剛3,于偉波2,牟介剛1,鄭水華1
(1.浙江工業大學機械工程學院,杭州310014;2.中國航空動力機械研究所,湖南株洲412002;3.哈爾濱工程大學機電工程學院,哈爾濱150001)
摘要:針對油氣管道內壁涂層減阻結構加工問題,提出一種能在管道內壁涂層表面加工出仿生非光滑表面減阻結構的方法。建立管道內壁輥壓加工機器人結構模型,對雙凸輪組件運動情況進行動力學分析,結合材料的流動特性,分析聚合物涂層材料在玻璃態轉化溫度附近的流動特性,建立聚合物黏彈性數學模型,利用黏彈性模型描述聚合物涂層的流變行為,采用數值模擬方法,研究熱輥壓過程中控制參數對熱輥壓后表面質量的影響,在輥壓速度為0.5、1.0、1.5rad/s三種情況進行輥壓實驗。結果表明:聚合物材料的流動變形量在保持溫度不變的情況下,隨著時間的增加而增加,在結束時刻,涂層凹坑形貌的回彈現象伴隨著溫度的降低而停止;在恒定輥壓速度下,聚合物涂層凹坑的復制率隨溫度的升高而增大,溫度較高時,蠕變速度加快,在輥壓溫度為150℃的2T/3時刻,聚合物涂層凹坑的形貌效果最佳,在輥壓溫度較低時,延長保壓時間可達到相同的填充效果;在輥壓速度為0.5 rad/s時,輥壓后凹坑形貌與理想凹坑形貌最為接近,表現出較好的聚合物時間依賴性。
關鍵詞:非光滑表面;加工機器人;熱輥壓;聚合物;數值模擬
收稿日期:2013-11-01修改稿收到日期:2013-12-19
中圖分類號:TB17文獻標志碼:A
Modeling for a non-smooth surface processing robot and hot-roll technique tests
GUYun-qing1,ZHAOGang3,YUWei-bo2,MOUJie-gang1,ZHENGShui-hua1(1. College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310014, China;2. China Aviation Powermachinery Research Institute, Zhuzhou 412002, China; 3. College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China)
Abstract:Aiming at processing issue of drag reduction structure of oil and gas pipeline inner wall coating, a method of processing the drag reduction structure with bionic non-smooth surface on the coating surface of inner wall of pipeline was proposed. A structural model of roll processing robot on inner wall of pipeline was established, and the movements of a double-cam component were analyzed. Combined with flow characteristics of material, the flow characteristics of polymer coating material nearby the glassy state transformation temperature were analyzed. A mathematical model of the polymer viscoelasticity was built to describe the rheological behavior of polymer coating. Also, a method of numerical simulation was used to investigate the influence of controlling parameters on the hot rolled surface quality in the hot rolling process, and the rolling tests at the rolling speed of 0.5, 1.0 and 1.5 rad/s were performed. The results showed that at a constant temperature, the flow deformation of the polymer material increases with increase in time, and the stress relaxation phenomenon of coating pit morphology stops with decreases in temperature at the ending instant; with a constant rolling speed, the replication ratio of polymer coating pits increases with increase in temperature; the creep speed rises when the temperature is higher; specially, when the rolling temperature keeps 150 ℃ at 2T/3, the effect of morphology of polymer coating pit is the best, and prolonging the keeping pressure time can achieve the same filling effect at lower rolling temperature; the pit morphology after rolling is closest to the ideal one at the rolling speed of 0.5 rad/s to reveal the better time dependence of polymer.
Key words:non-smooth surface; processing robot; hot-roll; polymer material; numerical simulation
非光滑表面加工制造技術通過對生物體體表形態進行分析,結合具體的工程背景,采用滿足工程條件的材料和適當的加工方式,以達到對非光滑表面的制備。當前對于非光滑表面進行加工的方法主要有激光加工法、生物成型法、鑄造成型法及化學氣相沉積法。
激光加工法是將高能量的脈沖激光作用于試件表面,在激光的照射下加工材料瞬間的熔化或蒸發,并在沖擊波作用下,將熔融物質噴射出去,達到加工目的。激光加工法可以在蠕墨鑄鐵材料表面加工出不同間距、形態和傾角的結構,在高速鋼表面加工制備出非光滑鱗片形態等[1-2]。Mazur研究組[3]利用激光在硅表面形成微米量級的柱狀結構。Choi等[4]采用多波段脈沖激光,在硅表面雕刻出不同深度和寬度的溝槽。任露泉等[5]通過控制激光的轉速、頻率和脈沖,在試件表面加工出非光滑形態。激光加工法作為一種先進的制造技術,在復雜表面加工上具有獨特的優勢,但其設備體積過大限制了在管道內壁實施加工的能力。
生物成型法是仿生表面制造的一種新方法,通過將生物體表形貌進行直接復制而獲得近似于生物的仿生表面。韓鑫等[6]對鯊魚皮強化處理后得到能夠復制的樣本,之后采用壓印手段制作出模版,再經模板復制得到仿鯊魚皮表面形貌。張德遠等[7]針對自然界中微生物細胞,通過多種加工方法,使微生物表面沉積具有磁性的材料,加工出具有一定特征結構的零件。以及利用鯊魚皮溝槽微復制制造的減阻表面[8-9]和標準形體微生物細胞表面金屬化制造功能微粒[10-11]等。生物成型法采用的構型生物需要一定的機械強度和活性,在加工能耗和排放方面具有一定優勢,能加工傳統物理和化學方法難以實現的復雜結構,但并不適合在管道內壁上大面積制造具有減阻的非光滑表面。
鑄造成型法是將金屬熔煉成符合一定要求的液體并澆入鑄型里,經過冷卻凝固、清潔處理后得到預定形狀和尺寸的工藝過程。田麗梅等[12]以葉輪表面為載體,對非光滑表面一次鑄造成型工藝進行了探討,經過鑄造成型方法加工的水泵與光滑葉輪水泵相比,效率提高5%。鑄造成型法雖然能制造出常規方法難以加工的形狀,但對加工零件大小有一定限制,在管道內大面積鑄造非光滑減阻表面存在很大困難。
化學氣相沉積法是通過化學反應方式,利用加熱、等離子激勵或光輻射等各種能源,使反應室內兩種或兩種以上氣態原料發生化學反應,形成一種新的材料,沉積到基片表面。Teshima等[13]利用等離子增強化學氣相沉淀技術,在玻璃基板上制備了接觸角為160°超疏水表面。Liu等[14]在石頭表面制備了具有紫外線響應的超疏水—超親水“開關”表面。李書宏等[15]在金屬材料表面上制備了超疏水表面。化學氣相沉積法雖然能加工出高精度的非光滑表面,但是其加工需要為反應的氣體提供反應室,并不適合在管道內壁上作業。
目前還沒有一種有效的管道內壁非光滑減阻表面加工方法及設備[16],針對油氣等長輸管道減阻節能的需求,圍繞管道內壁涂層減阻結構,提出一種能在管道內壁涂層表面加工出非光滑表面減阻結構的工藝方法,以管道內壁輥壓加工機器人為載體,結合材料的流動特性,對熱輥壓狀態過程進行研究。
1輥壓加工機器人模型
輥壓加工機器人[17]主要包括行走機構和加工機構兩部分,行走機構實現機器人在管道內的行走,加工機構實現在管道內表面涂層的輥壓加工。
1.1行走機構模型
行走機構為蠕動式結構,分為管徑適應輪機構1、前支撐結構、蠕動行走機構、后支撐結構和管徑適應輪機構2等5部分,行走機構結構圖如圖1所示。

1.直線電機 2. 螺母 3. 絲杠 4. 支撐塊 5.步進電機 6. 調節螺桿 7. 行走輪 8. 調節螺母 圖1 行走機構結構圖 Fig.1 Schematic of walking mechanism
管徑適應輪機構1和前支撐機構構成蠕動前關節,管徑適應輪機構2和后支撐機構構成蠕動后關節。在蠕動行走過程中,直線電機伸長、縮短帶動前后蠕動關節移動,其具體步驟是:前支撐塊松開、后支撐塊夾緊,直線電機伸長帶動蠕動前關節前進;前支撐塊夾緊、后支撐塊松開,直線電機收縮帶動蠕動后關節前進;重復以上動作,實現行走機構的蠕動行進。
管徑適應輪機構為手動預緊式結構,在機器人進入工作狀態前,手動調節管徑適應輪機構的調節螺母將行進輪壓緊在管道內壁。前、后支撐機構為絲杠螺母副帶動的曲柄滑塊機構,在工作過程中螺母在驅動電機帶動下直線滑動,螺母帶動曲柄擺動實現支撐塊的俯仰運動,實現支撐塊的夾緊與松開動作。管徑適應輪機構和支撐機構均采用對稱式分布,即在周向上呈90°均勻分布四組行進輪/支撐塊結構。管徑適應輪機構和曲柄滑塊支撐機構均采用桿系結構,其管徑適應能力強,在一定管徑變化范圍內行走機構可以通過調節桿系機構擺角來適應管徑變化。
1.2加工機構模型
加工機構拖掛在行走機構尾部,由行走機構將其拖曳至待加工位置,其包括前加工組件、驅動組件和后加工組件3部分,加工機構結構圖如圖2所示。

1. 直流伺服電機 2. 從動錐齒輪 3. 推力球軸承 4. 傳動軸 5. 主動錐齒輪 6. 輥壓刀具 7. 加熱棒 8. 彈簧 9. 滑軌 10. 滑道 11. 滾輪 12. 凸輪 13. 外套筒 14. 空心軸 圖2 加工機構結構圖 Fig.2 Schematic of processing mechanism
驅動組件由直流伺服電機和錐齒輪系傳動裝置組成,錐齒輪系為一主動輪帶動兩個從動輪反向同步旋轉。前/后加工組件結構相同、對稱布置;加工組件主要包括輥壓頭機構、滑軌滑道定向機構、凸輪徑向傳動機構、內外套筒周向旋轉機構。在對非光滑表面進行加工時,采用雙刀具反向旋轉的方式,將刀具系統與左、右錐齒輪連接,實現兩組刀具反向同步旋轉,加工機構機體所受的切向反力相互抵消,達到受力平衡狀態,避免機體扭轉變形,保證加工機構的穩定性。
在加工過程中,周向上兩組刀具分別隨左右錐齒輪旋轉實現加工過程的主運動;徑向上刀架在由凸輪傳動作用和滑道導向作用下沿徑向伸縮,實現刀具的進刀和退刀動作。該結構實現了單動力多功能的目標,即一個驅動電機帶動整個加工組件,實現刀具主運動、進刀、退刀動作,使得結構更加緊湊,加工過程各動作協調性更好。
1.3輥壓頭表面形貌
輥壓頭作為輥壓加的核心組件,直接影響到非光滑表面的加工質量。非光滑表面形態[18]主要有凹坑型、鱗片型、三角形溝槽。凹坑型結構尺寸比三角形溝槽結構大兩個數量級,鱗片型結構一般采用生物復制法制備,其制作成本高,不易大面積使用。考慮到加工和維護的優越性,結合輥壓加工機器人實際情況,以凸包作為輥壓頭表面形貌,即可在管道涂層上輥壓出凹坑型非光滑表面結構。輥壓頭半徑R=27 mm、長L=90 mm。凸包半徑r=1.6 mm、高h=1.8 mm;凸包在輥壓頭上按菱形排列,凸包軸向間距s=16 mm、周向夾角θ=20°。輥壓頭結構圖如圖3所示。
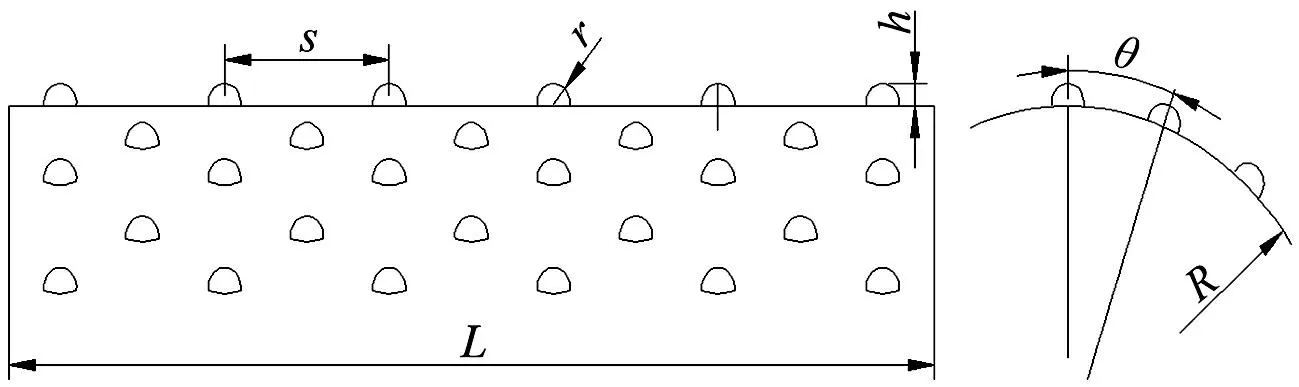
圖3 輥壓頭結構圖 Fig.3 Schematic of rolling head
1.4雙凸輪組件運動學分析
凸輪機構的作用是推動輥壓刀具迅速完成進刀動作,保證輥壓刀具能夠切入涂層內,并在加工完成后使輥壓刀具迅速完成徑向退刀動作。凸輪基圓半徑為40 mm,最高點離凸輪中心距離為45 mm,遠休止角能夠達到180°[19]。當凸輪過渡圓半徑rg=2.5、5、10 mm,升程時滾輪的加速度分別為4.30、3.55、3.50 mm/s2;三個加速度曲線都出現尖端跳躍,這種尖端跳躍會對刀桿產生一個瞬間沖擊力,其數值較小,并且該瞬間沖擊力隨著rg的變化無明顯變化,因此不同尺寸的rg對瞬間沖擊力的影響可以忽略;同時rg的變化對滾輪速度和加速度的影響不大,且rg=2.5 mm最符合凸輪設計要求。圖4為滾輪繞著相對固定的雙凸輪組件滾動,與滾輪一體的頂桿相對運動所產生的速度和加速度曲線圖;圖5為直流伺服電機驅動加工機構運動時電機所產生的扭矩圖。


圖4 滾輪頂桿運動曲線Fig.4Motioncurvesoftrundlefollower圖5 直流伺服電機扭矩曲線Fig.5TorquecurveofDCservomotor
由圖4可知,滾輪頂桿速度曲線和加速度曲線產生不穩定的波動現象,其原因是凸輪與滾輪相互接觸時產生振動以及輥壓刀具與管道內壁接觸時產生振動所引起的。因此,在實際輥壓加工作業時,需對該處產生的系統振動進行處理,通過在凸輪安裝架上黏貼橡膠減震墊,可有效的防止振動。由圖4、圖5可知,當直流伺服電機驅動加工機構作業時,徑向對稱分布的刀架借助滾輪繞著雙凸輪組件滾動,此時,單個刀具相對于機器人中軸線的速度、加速度和位移均為上、下兩個刀具的相對速度、相對加速度和相對位移的一半。在雙凸輪組件升程與回程之間的過渡段部分,刀架相對運動所產生的速度和加速度存在一小段劇烈變化,速度最大可達0.194 m/s,加速度最大可達160 m/s2,直流伺服電機最大扭矩為44.5 N·m。
2聚合物流變行為及黏彈特性
2.1聚合物材料應力松弛特性
考慮到應力松弛實驗中實驗樣件變形較小,為了便于測量,同時應力松弛結果更易于用黏彈性理論解釋,聚合物選擇聚氨基甲酸酯(玻璃態轉換溫度為140℃)材料進行應力松弛實驗。實驗樣件[20]端面尺寸為18 mm×18 mm,實驗樣件結構圖如圖6所示。實驗設備采用電子萬能材料實驗機,該設備裝有恒溫爐,最高溫度可達250℃,溫度波動范圍±0.1℃至±1℃,在加熱達到指定溫度時進行實驗,實驗機隨著時間延長自動記錄實驗樣件在恒定變形下的應力變化。

圖6 實驗樣件結構圖 Fig.6 Schematic of experimental samples
實驗中分別對實驗樣件施加ε=0.005、0.010、0.015三種初始應變,計算機程序設定從時間t=0時刻開始記錄數據,之后每10 s記錄一次數據,共記錄60次,歷時600 s。聚氨基甲酸酯在三種ε下受力隨時間的變化情況如圖7所示。

圖7 聚氨基甲酸酯應力松弛曲線 Fig.7 Stress relaxation curves of polyurethane
由圖7可知,實驗樣件在三種初始應變下,所受的作用力均隨著時間延長而減小,曲線變化趨勢類似,實驗樣件受力F均隨著ε的增大而減小。當ε=0.005時,在t=0~50 s過程中,F的變化梯度最大,非線性特性明顯,Fmax=123 N;在t=50~250 s過程中,F的變化梯度較小,呈近線性變化趨勢;在t=250~600 s過程中,F的變化梯度微小,線性變化趨勢明顯,聚氨基甲酸酯材料的應力松弛現象明顯。當ε=0.010時,在t=0~100 s過程中,F的變化梯度最大,非線性特性明顯,Fmax=225 N;在t=100~300 s過程中,F的變化梯度較小,呈近線性變化趨勢;在t=300~600 s過程中,F的變化梯度微小,線性變化趨勢明顯,聚氨基甲酸酯材料的應力松弛現象明顯。當ε=0.015時,在t=0~100 s過程中,F的變化梯度最大,非線性特性明顯,Fmax=345N;在t=100~200 s過程中,F的變化梯度較小,呈近線性變化趨勢;在t=200~600 s過程中,F的變化梯度微小,線性變化趨勢明顯,聚氨基甲酸酯材料的應力松弛現象明顯。
由于聚合物材料的黏彈性,實驗溫度和實驗速率在拉伸過程中變化時,應力應變曲線呈現出多種變化形式[20]。在聚合物受到一瞬時應力作用,由于聚合物是各向同性材料,在極限應力范圍內,其應力、應變關系可表示:
σ=Eε
(1)
式中:E為楊氏模量,σ為應力,ε為應變。
由式(1)可知聚合物的彈性變形對時間沒有依賴性。由于聚合物的黏流態,在一定條件下聚合物材料流動變形符合液體的流動規律,當液體受到剪切力作用時便開始流動,且單位面積液層上受到的剪切力與流動層的速度梯度成正比,即:
(2)

在聚合物涂層上進行熱輥壓時,溫度保持在玻璃化轉變溫度附近,聚合物材料在力學性能上同時顯示出彈性變形和黏性變形,聚合物的應變和模量不僅與外界溫度和載荷有關,而且具有很大的時間依賴性,在力學上主要表現為蠕變及其恢復。蠕變是聚合物材料在保持應力不變的條件下,隨著t不斷延長,應變也不斷增加的現象。聚合物的蠕變可分為3個階段:
第1階段為瞬變形階段,即當聚合物在外力作用時,實驗樣件產生瞬時應變,由于應變發展極快,可認為與時間無關,則這種小變形為:
ε1=σ/E1
(3)
式中:ε1為普彈應變,E1為普彈形變模量。
第2階段為推遲蠕變階段,這一階段蠕變速度極快,之后減小到一個穩定值,其變形是第1階段的數倍,并且變形可以用時間來表示,即:
ε2=ψ(t)σ/E2
(4)
式中:ε2為高彈應變,E2為高彈形變模量,ψ(t)為蠕變函數。
第3階段為聚合物的黏性流動,這一階段聚合物服從牛頓流動定律,即:
ε3=tσ/η3
(5)
式中:ε3為不可逆應變,η3為聚合物的黏度。
聚合物材料在外載荷作用下,蠕變總應變ε(t)為以上各階段的應變之和:
ε(t)=ε1+ε2+ε3=
σ[1/E1+ψ(t)/E2+t/η3]
(6)
式(6)中1/E1+ψ(t)/E2+t/η3為蠕變柔量,即單位作用所產生的應變。若在一定時間后去掉外載荷,則聚合物逐漸趨于恢復其原來狀態;但由于蠕變過程中的流動,聚合物會留下不可逆的永久形變。故在一定條件下,實驗樣件受力呈現出明顯的非線性特性。
2.2聚合物材料黏彈性模型
聚合物模型可以由許多彈簧和阻尼模型組合的模型來描述,廣義力學模型最大特點是能夠模擬出聚合物一系列松弛時間和推遲時間,采用應力松弛公式描述聚合物模型的力學本構方程為[21]:
(7)
式中:σ(t)為應力,ε0為初始應變值,t為當前時間,ξ為過去時間,E(t)為松弛模量,即應力松弛方程,表示彈性模量對時間的依賴性,其方程為:
(8)
(9)
式中:E0為材料初始模量,E∞為松弛時間t趨于無窮大時E(t)的穩定值,N為模型中Maxwell單元個數,Ei為第i個Maxwell單元彈性模量,λi為松弛時間,即第i個Maxwell單元彈性模量和黏度之間比例常數。
式(8)、(9)兩邊同時除以E0得無量綱化后的應力松弛方程e(t):
(10)
(11)
隨著溫度的升高,聚合物的狀態分別呈現出玻璃態、黏彈態和黏流態,其熱力學性能和動力學性能將呈現出不同程度的變化[22]。根據時間-溫度疊加原理,應力的溫度依賴性和縮減時間概念可以描述溫度對聚合物的力學行為,則由式(7)可得:
(12)
式中:A(T)為聚合物在溫度T時的縮減因子,T0為參考溫度,ET0為聚合在參考溫度的模量。
模量與溫度之間關系為:
(13)
WLF方程用于預測溫度對聚合物行為的影響,對任意選取參考溫度T0,WLF方程為:
(14)
式中:C1和C2為聚合物在T0下的材料常數。
通過以上分析可以預測不同溫度下聚合物材料的黏彈特性,同時可以通過數值模擬來進一步分析熱輥壓過程中材料的流動變形特性。針對實驗得到的應力松弛曲線,采用lsqcurvefit函數對ei和λi進行回歸分析。為了更加直觀地對測量的數據進行分析,避免不合理的現象出現,對測量數據做無量綱化處理,得到如圖8所示的無量綱化下應力松弛曲線。

圖8 無量綱化下應力松弛曲線 Fig.8 Stress relaxation curves of dimensionless
由圖8可知,三條曲線基本上重合,客觀上驗證了實驗的有效性。基于非線性目標函數(式(10)),對無量綱化的結果進行回歸分析,無量綱化的模型參數即松弛模量以及相對應的松弛時間常數可以擬合到M=4,聚氨基甲酸酯黏彈性模型參數如表1所示。在定義材料特性的過程中輸入表1的模型參數,參考溫度T0=140 ℃,建立聚氨基甲酸酯黏彈性材料模型。

表1 聚氨基甲酸酯黏彈性模型參數
3熱輥壓過程建模及工藝分析
3.1熱輥壓工藝及建模
3.1.1熱輥壓工藝
熱輥壓工藝是一種連續的復制工藝,以輥壓加工機器人為輥壓平臺,輥壓頭表面分布著非光滑表面特征結構,輥壓頭內部安裝有加熱棒,對輥壓頭進行加熱,并通過溫度控制器維持溫度恒定不變。在熱輥壓工藝過程中,輥壓頭部件通過凸輪的升程和回程,實現輥壓頭向下壓印聚合物涂層表面,在壓印的同時,輥壓頭表面的凸包結構連續漸進地復制到聚合物涂層表面。熱輥壓頭與涂層在壓印過程中相互接觸,涂層與輥壓頭接觸區域的溫度在玻璃態轉化溫度附近,在輥壓頭下壓和滾動過程中,涂層受擠壓產生流動變形,實現輥壓復制。
聚合物熱輥壓工藝包括加熱、熱輥壓和冷卻三個過程。熱輥壓工藝過程直接決定復制的最終效果,這一過程中聚合物材料具有黏彈性特征,以下主要針對玻璃態轉變溫度的聚合物材料黏彈性進行研究。為了簡化計算模型,作如下假設:熱輥壓過程中材料緩慢流動,可視為靜態過程;經預熱的熱輥壓頭在輥壓聚合物涂層時,處于熱平衡狀態,可視為靜態恒溫過程;聚合物材料流動變形可以用連續力學方程來描述。
3.1.2熱輥壓過程建模
聚氨基甲酸酯在玻璃態溫度附近處于黏彈態,可用黏彈性模型描述其力學行為,聚合物涂層材料模型采用式(12)的黏彈性模型,并輸入回歸分析得到的彈性模量和松弛時間參數,完成聚氨基甲酸酯的黏彈性材料創建。熱輥壓頭采用鋁合金材料加工而成,其強度相對聚合物較大,可將輥壓頭視為剛體。輥壓頭溫度維持在玻璃態溫度附近,需要施加溫度載荷,在計算中很難將實際輥壓動作全部模擬,需對輥壓頭施加水平x軸方向的速度,并在局部坐標系中施加約束對象及轉動自由度,完成轉動約束;考慮到模型的對稱性,在涂層模型的對稱平面上沒有垂直于平面的位移,利用這一特性確定模型邊界條件。
不同結構的兩個表面相互接觸分別稱主表面和從表面,選擇輥子表面為主接觸面,聚合物涂層表面為從接觸面,輥壓頭在聚合物涂層表面滾動采用面面接觸算法。聚合物涂層的材料模型采用六面體網格劃分;熱輥壓頭采用四面體網格劃分,并通過控制網格大小、密度和質量等實現熱輥壓頭凹坑區域等重要位置處加密,這種疏密結合的網格在一定程度上可以減少網格數量、縮短計算時間、提高計算效率。
3.2熱輥壓工藝的時間依賴性與溫度依賴性
3.2.1時間依賴性
輥壓頭部件通過凸輪的升程和回程,實現輥壓頭向下壓印聚合物涂層表面,為更加直觀的分析聚合物在黏彈態溫度的流動變形,設定輥壓頭的輥壓溫度為150 ℃,加載壓力為0.7 MPa,輥壓頭從開始接觸涂層表面輥壓凹坑至完全離開的時間為T。聚合物材料流動變形時間依賴性如圖9所示。

圖9 聚合物材料流動變形時間依賴性 Fig.9 Time dependence of polymer material flow deformation
由圖9可知,聚合物材料分子間的相互作用力很強,其自身具有一定黏性,在過渡到新的平衡狀態時,運動分子需克服內摩擦阻力,因此松弛過程和時間相關。在熱輥壓工藝中,輥壓階段的工藝溫度為玻璃態轉化溫度之上,此時聚合物材料處于黏彈態,在外界載荷作用下,聚合物材料具有黏彈性特性,表現出時間依賴性,即維持溫度不變,材料的流動變形隨時間而變化。聚合物材料的流動變形量在保持溫度不變的情況下,隨著時間的增加而增加。在實際加工中,可通過降低輥壓速度,延長輥壓時間來提高涂層表面凹坑特征的復制率。在T時刻,涂層凹坑形貌的回彈現象伴隨著溫度的降低而停止,因此輥壓溫度不易過高于玻璃態轉溫度,若使涂層溫度迅速降到玻璃態溫度,則可有效避免材料的回流。
3.2.2溫度依賴性
在分析聚合物在黏彈態溫度的流動變形中,選擇熱輥壓頭的輥壓溫度分別為140 ℃、145 ℃和150 ℃。輥壓頭質心速度為1.09 mm/s,輥壓頭角速度為0.5 rad/s,輥壓頭從開始接觸涂層表面輥壓凹坑至完全離開的時間為T。熱輥壓頭在不同輥壓溫度和不同時間點聚合物涂層填充情況如圖10所示。

圖10 不同輥壓溫度和不同時間點涂層填充情況 Fig.10 Coating filled of different rolling temperature and different time points
由圖10可知,熱輥壓工藝溫度直接影響聚合物涂層表面最終的復制效果,在熱輥壓時間一定情況下,若溫度過低,則聚合物流動性能不夠,產生形變相對較小;若溫度過高,則聚合物流動性能過強,不利于輥壓非光滑表面凹坑形貌,甚至影響輥壓的復制精度。聚合物涂層凹坑的復制率隨溫度的升高而增大,在輥壓溫度150℃的2T/3時刻,涂層凹坑的形貌優于其它溫度下的效果,說明溫度較高時,蠕變速度加快。在輥壓溫度較低時,通過延長保壓時間也可以達到相同的填充效果。在3種溫度的結束時刻,聚合物涂層的凹坑形貌有適量回彈現象,原因是熱輥壓頭與涂層分離,殘余應力產生彈性變形,當聚合物涂層溫度冷卻到玻璃態轉變溫度之下,其力學狀態處于玻璃態,回彈現象即會停止。
4輥壓實驗
以凸包作為輥壓頭表面形貌,通過非光滑表面加工機器人實驗樣機對熱輥壓性能進行實驗,輥壓頭如圖11所示。

圖11 輥壓頭 Fig.11 Rolling head
聚合物選取聚氨基甲酸酯類常溫固化型涂料,對管道內壁進行涂覆及涂層固化處理,采用激光位移傳感器測量聚合物涂層表面凹坑型結構的截面形狀,通過測量輥壓的凹坑型特征結構的截面形狀,計算輥壓工藝中聚合物表面凹坑的復制率。復制率為聚合物涂層表面上凹坑特征結構的中截面與標準凹坑特征結構中截面的面積比:
η=S′/S×100%
(15)
式中:S′為輥壓后聚合物涂層表面凹坑特征結構中截面面積,S為標準凹坑特征結構中截面面積。

1.理想凹坑形貌 2.輥壓后凹坑形貌 圖12 凹坑中截面對比圖 Fig.12 Comparisons of dimpled center section
在輥壓溫度150℃、輥壓深度0.8 mm、輥壓速度ω=0.5、1.0、1.5 rad/s時進行輥壓實驗,得到如圖12所示的聚合物涂層形成的凹坑中截面形貌。
由圖12可知,在聚合物涂層表面基本實現了凹坑結構的復制,線條形貌與標準凹坑大體上一致,說明機器人能夠滿足非光滑表面結構加工需求,驗證了機器人設計的合理性。在ω=0.5 rad/s時,輥壓后凹坑形貌與理想凹坑形貌最為接近;在ω=1.5 rad/s時,輥壓后凹坑形貌與理想凹坑形貌相差最為明顯;輥壓速度的降低,使得聚合物涂層與輥壓頭接觸時間較長,表現出較好的聚合物時間依賴性。說明在輥壓加工過程中,降低輥壓速度有利于獲取精度較高的凹坑形貌;輥壓后的凹坑表面并非光滑的,其原因是由于熱輥壓頭與聚合物涂層分離時,殘余應力產生的彈性變形,聚合物涂層會產生局部微小流動,致使凹坑發生微小變形。在ω=0.5、1.0、1.5 rad/s時,由式(15)分別計算出復制率為85.0%、78.6%、73.2%。
5結論
建立了輥壓加工機器人的行走機構和加工機構的結構模型,設計了熱輥壓頭的結構,給出了輥壓頭表面形貌尺寸及分布參數。基于聚合物涂層材料在力學上的蠕變和應力松弛行為,對其具有的時間依賴性和黏彈性模型進行了分析;分析了聚氨基甲酸酯材料的應力松弛特性,對實驗數據進行回歸分析,確定了黏彈性模型的關鍵參數。給出了熱輥壓加工工藝方法,建立了熱輥壓過程計算模型,利用黏彈性材料模型描述聚合物涂層的流變特性,分析了聚合物材料的溫度依賴性和時間依賴性,結果表明:在熱輥壓工藝過程中壓力和溫度恒定不變時,聚氨基甲酸酯涂層具有較好的黏彈特性,材料的形貌特征隨著時間增加而變化,復制率隨輥壓溫度的升高而增加。降低輥壓速度有利于提高凹坑形貌的復制率,在輥壓速度為0.5 rad/s時,復制率為85.0%。
參考文獻
[1]孫娜, 周宏, 單宏宇, 等. 激光制備仿生非光滑表面蠕墨鑄鐵的耐磨性[J]. 吉林大學學報: 工學版, 2009, 39(5): 1156-1158.
SUN Na, ZHOU Hong, SHAN Hong-yu, et al. Wear resistance of compact graphite cast iron with biomimetic non-smooth surfaces processed by laser[J]. Journal of Jilin University: Engineering and Technology Edition, 2009, 39(5): 1156-1158.
[2]齊彥昌, 馬成勇, 彭云, 等. 激光雕刻非光滑表面的微觀組織和性能研究[J]. 材料熱處理學報, 2006, 27(3): 108-111.
QI Yan-chang, MA Cheng-yong, PENG Yun, et al. Study on microstructure and properties of nonsmooth surface made by laser carving[J]. Transactions of Materials and Heat Treatment, 2006, 27(3): 108-111.
[3]Tsing-hua H, Richard J F, Claudia W, et al. Microstructuring of silicon with femtosecond laser pulses[J]. Applied Physics Letters, 1998, 73(12): 1673-1675.
[4]Choi S B, Kyoung J S, Kim H S, et al. Nanopattern enabled terahertz all-optical switching on vanadium dioxide thinfilm[J]. Applied Physics Letters, 2011, 98(7): 071105-1-071105-3.
[5]任露泉, 王再宙, 韓志武. 激光處理非光滑凹坑表面耐磨試驗的均勻設計研究[J]. 材料科學與工程, 2002, 20(2): 214-216.
REN Lu-quan, WANG Zai-zhou, HAN Zhi-wu. Research on wear resistance of concave nonsmoothed surface with well-distribution design[J]. Materials Science and Engineering, 2002, 20(2): 214-216.
[6]韓鑫, 張德遠. 鯊魚皮微電鑄復制工藝研究[J]. 農業機械學報, 2011, 42(2): 229-234.
HAN Xin, ZHANG De-yuan. Replication of shark skin based on micro-electroforming[J].Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(2): 229-234.
[7]張德遠, 蔡軍, 李翔, 等. 仿生制造的生物成形方法[J]. 機械工程學報, 2010, 46(5): 88-92.
ZHANG De-yuan, CAI Jun, LI Xiang, et al. Bioforming methods of bionic manufacturing[J]. Journal of Mechanical Engineering, 2010, 46(5): 88-92.
[8]Han X, Zhang D Y. Bio-replicated forming of the biomimetic drag-reducing surfaces in large area based on shark skin[J]. Chinese Science Bulletin: Series E, 2008, 53(10): 1587-1592.
[9]Han X, Zhang D Y. Study on the micro-replication of shark skin[J]. Science in China: Series E, 2008, 51(7): 890-896.
[10]Chen B, Zhan T Z, Lian Z Y, et al. Magnetization of microorganism cells by sol-gel method[J]. Science in China: Series E, 2008, 51(5): 591-597.
[11]Li X F, Li Y Q, Cai J, et al. Research on metallization of bacteria cells[J]. Science in China: Series E, 2003, 46(2): 161-167.
[12]田麗梅, 卜兆國, 陳慶海, 等. 肋條狀仿生非光滑表面鑄造成型方法[J]. 農業工程學報, 2011, 27(8): 189-194.
TIAN Li-mei, BU Zhao-guo, CHEN Qing-hai, et al. Casting method of rib-like bionic non-smooth surface[J]. Transactions of the Chinese Society of Agricultural Engineering, 2011, 27(8): 189-194.
[13]Teshima K, Sugimura H, Inoue Y, et al. Wettability of poly (ethylene terephthalate) substrates modified by a two-step plasma process: ultra water repellent surface fabrication[J]. Chemical Vapor Deposition, 2004, 10(6): 295-297.
[14]Liu H, Feng L, Zhai J, et al. Reversible wettability of a chemical vapor deposition prepared ZnO film between superhydrophobicity and superhydrophilicity[J]. Langmuir, 2004, 20(14): 5659-5661.
[15]李書宏, 馮琳, 李歡軍, 等. 柱狀結構陣列碳納米管膜的超疏水性研究[J]. 高等學校化學學報, 2003, 24(2): 340-342.
LI Shu-hong, FENG Lin, LI Huan-jun, et al. Super-hydrophobicity of post-like aligned carbon nanotube films[J]. Chemical Journal of Chinese Universities, 2003, 24(2): 340-342.
[16]Zhao G, Gu Y Q, Zheng J X, et al. The study of the small drag reduction testing platform[C]// 2011 2nd International Conference on Artificial Intelligence, Management Science and Electronic Commerce. Los Alamitos, US:IEEE Computer Society, 2011: 6021-6024.
[17]韓毛毛. 管道內壁減阻結構加工機器人控制系統研究[D]. 哈爾濱: 哈爾濱工程大學, 2012.
[18]谷云慶, 趙剛, 劉浩, 等. 氣動滅火炮彈體橡膠圈仿生凹坑表面減阻特性[J]. 吉林大學學報: 工學版, 2013, 43(4): 983-990.
GU Yun-qing, ZHAO Gang, LIU Hao, et al. Characteristics of drag reduction of bionic dimpled surface of shell rubber ring of aerodynamic extinguishing cannon[J]. Journal of Jilin University: Engineering and Technology Edition, 2013, 43(4): 983-990.
[19]饒軍. 管道內壁減阻結構加工機器人關鍵技術研究[D]. 哈爾濱: 哈爾濱工程大學, 2012.
[20]藍樹槐. 非晶體聚合物基板的微細熱壓轉印工藝研究[D]. 上海: 上海交通大學, 2010.
[21]Shaw M T, Macknight W J. Introduction to polymer viscoelasticity[M]. Third edition. Hoboken, New Jersey: John Wiley & Sons, 2005.
[22]Lan S H, Song J H, Lee M G, et al. Continuous roll-to-flat thermal imprinting process for large-area micro-pattern replication on polymer substrate[J]. Microelectronic Engineering, 2010, 87(12): 259.