傳感器優(yōu)化布置下的移動(dòng)部件試驗(yàn)臺(tái)的模態(tài)研究
2015-12-31 12:11:34陳子龍趙志良
機(jī)械工程與自動(dòng)化 2015年3期
陳子龍,錢 煒,趙志良
(上海理工大學(xué) 機(jī)械工程學(xué)院,上海 200093)
0 引言
大型機(jī)械結(jié)構(gòu)的模態(tài)試驗(yàn)對(duì)于尋找薄弱環(huán)節(jié)、避免共振、了解結(jié)構(gòu)的變形趨勢(shì)具有重要的意義。然而,在對(duì)移動(dòng)部件試驗(yàn)臺(tái)這樣的大型結(jié)構(gòu)進(jìn)行模態(tài)試驗(yàn)的過程中,傳感器的布置是一個(gè)難點(diǎn)。如果根據(jù)經(jīng)驗(yàn)采用測試點(diǎn)均布的方法,則預(yù)選測試點(diǎn)達(dá)到了150個(gè),這將導(dǎo)致試驗(yàn)會(huì)有非常大的工作量。出于對(duì)工作量和成本的考慮,傳感器要以盡量少的數(shù)量布置在合適的位置上。國內(nèi)外有很多針對(duì)測試點(diǎn)優(yōu)化配置理論的研究,具有代表性的有Kammer[1]提出的有效獨(dú)立法、Hemez[2]提出的模態(tài)動(dòng)能法和程建旗[3]改進(jìn)的有效獨(dú)立法。本文基于有效獨(dú)立法對(duì)傳感器布置進(jìn)行優(yōu)化,并根據(jù)優(yōu)化結(jié)果完成模態(tài)試驗(yàn)。
1 整機(jī)有限元模態(tài)分析
移動(dòng)部件試驗(yàn)臺(tái)三維模型如圖1所示,主要包括:固定在左、右兩個(gè)支座上的主床身;固連在一起的工作臺(tái)基座、配重架;配重以及工作臺(tái)。其中,工作臺(tái)基座、配重架、配重以及工作臺(tái)可以整體由主床身上的絲桿牽引著在水平方向的導(dǎo)軌上移動(dòng);工作臺(tái)可以由裝在工作臺(tái)基座上的絲杠牽引著在豎直方向的導(dǎo)軌上移動(dòng)。
1.1 模型的簡化
運(yùn)用Workbench軟件對(duì)試驗(yàn)臺(tái)進(jìn)行模態(tài)試驗(yàn)。本模型比較復(fù)雜,需要對(duì)裝配體模型進(jìn)行簡化。楊永亮[4]得出了如下結(jié)論:在大型結(jié)構(gòu)中當(dāng)圓孔的半徑小于10mm時(shí),孔的大小對(duì)最大位移影響不大;圓角對(duì)拉壓的影響效果是一致的。因此,在模型中壓縮這些特征。另外還要在裝配體模型中壓縮掉一些像床身端蓋、導(dǎo)軌壓塊、防護(hù)罩、拖鏈支架等這類對(duì)分析結(jié)果影響小但是結(jié)構(gòu)復(fù)雜的零部件。又因?yàn)榕渲貕K的邊界條件比較復(fù)雜,所以把配重塊壓縮后,用力進(jìn)行替代。
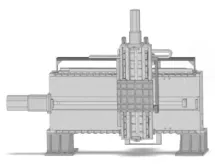
圖1 移動(dòng)部件試驗(yàn)臺(tái)三維模型
1.2 邊界條件設(shè)置和網(wǎng)格劃分
采用Workbench內(nèi)置的5種接觸類型對(duì)模型中的接觸面進(jìn)行設(shè)置。固定支撐選擇兩底座的底面。網(wǎng)格劃分采用四面體網(wǎng)格,精度設(shè)置為粗糙。劃分結(jié)果為節(jié)點(diǎn)總數(shù)268 727,單元總數(shù)147 200個(gè)。前處理后的模型如圖2所示。因?yàn)橛昧μ娲伺渲貕K,需要先進(jìn)行預(yù)應(yīng)力分析,然后在預(yù)應(yīng)力分析結(jié)果的基礎(chǔ)上進(jìn)行模態(tài)分析。
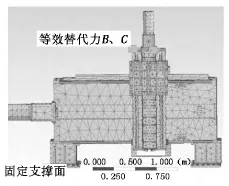
圖2 三維模型前處理結(jié)果
1.3 分析結(jié)果
以計(jì)算前4階模態(tài)振型和固有頻率為例,有限元分析結(jié)果如圖3所示。第1階振型表現(xiàn)為整體的前后擺動(dòng);第2階為配重架左右扭動(dòng);第3階為配重架右側(cè)上下扭動(dòng);第4階為配重架左側(cè)上下扭動(dòng)。
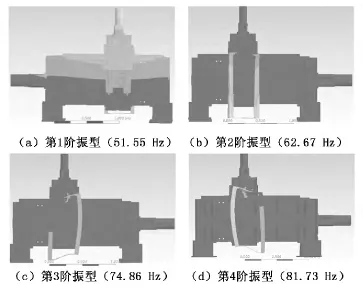
圖3 有限元分析得到的振型圖
2 測試點(diǎn)優(yōu)化配置
本文采用有效獨(dú)立法完成傳感器布置優(yōu)化,它是在機(jī)械方面的大型復(fù)雜結(jié)構(gòu)上運(yùn)用較多且較為成熟的方法。其基本思想是:逐步刪除對(duì)模態(tài)矩陣的線性獨(dú)立貢獻(xiàn)最小的自由度,在保證識(shí)別目標(biāo)模態(tài)的前提下完成傳感器的優(yōu)化布置。
2.1 有效獨(dú)立法原理
傳感器任意時(shí)間的輸出為:

其中:Φs為按預(yù)選測點(diǎn)縮減后的振型矩陣;q為模態(tài)坐標(biāo)向量;N為方差為的高斯白噪聲。則可以得到q和它的最小二乘解的協(xié)方差矩陣P為:

其中:Q為Fisher信息矩陣。假設(shè)測量噪聲是不相關(guān)的,則Fisher信息矩陣Q可以表示為:

其中:AO為中間變量。根據(jù)每個(gè)自由度的貢獻(xiàn),AO可以表示為:

其中:為Φs中與第i個(gè)自由度所對(duì)應(yīng)的第i行。
構(gòu)造矩陣G:

其中:Ψ為矩陣AO的特征向量;λ為AO的特征值。矩陣G的對(duì)角線上的第i個(gè)元素的大小代表第i個(gè)自由度對(duì)模態(tài)矩陣的秩的貢獻(xiàn)。如果第i個(gè)元素很小,說明在對(duì)應(yīng)的自由度無法識(shí)別模態(tài),可以刪除。進(jìn)行迭代運(yùn)算,每一次運(yùn)算刪除最小的對(duì)角線元素所對(duì)應(yīng)的自由度,直到最后得到設(shè)定的目標(biāo)自由度數(shù)。
2.2 有效獨(dú)立法的實(shí)現(xiàn)
根據(jù)經(jīng)驗(yàn)和均布原則,在移動(dòng)試驗(yàn)臺(tái)上得到預(yù)選測試點(diǎn)150個(gè)。每個(gè)測試點(diǎn)有x、y、z三個(gè)自由度,共450個(gè)自由度。從有限元分析的前4階結(jié)果文件中提取按這些自由度縮減后的模態(tài)矩陣Φs,組成450×4的矩陣。設(shè)定目標(biāo)自由度總數(shù)為120,把該矩陣代入公式(5)進(jìn)行迭代運(yùn)算。每次運(yùn)算結(jié)束,刪除最小的對(duì)角線元素所對(duì)應(yīng)的Φs中的一行(一個(gè)自由度),最后得到120個(gè)自由度數(shù)。分析這120個(gè)自由度發(fā)現(xiàn):這些自由度一共分布在51個(gè)測試點(diǎn)上,并不是在40個(gè)測試點(diǎn)上。因?yàn)檫@51個(gè)測試點(diǎn)部分測試點(diǎn)只有1個(gè)或者2個(gè)自由度留下,其他的自由度被篩除了。考慮到試驗(yàn)要用到的是三向加速度傳感器,因此把這51個(gè)測試點(diǎn)每個(gè)都補(bǔ)全到3個(gè)自由度,一共得到153個(gè)自由度。表1為床身左側(cè)面初選測試點(diǎn)節(jié)點(diǎn)編號(hào)和位置,共8個(gè)。表2為優(yōu)化后的床身左側(cè)面測試點(diǎn)節(jié)點(diǎn)編號(hào)和位置,共4個(gè)。

表1 床身左側(cè)面初選測試點(diǎn)
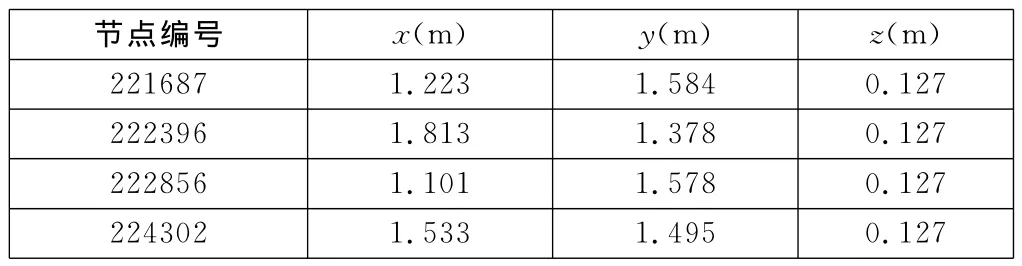
表2 優(yōu)化后床身左側(cè)面測試點(diǎn)
3 整機(jī)模態(tài)試驗(yàn)
3.1 試驗(yàn)方案和設(shè)備
模態(tài)測試采用單點(diǎn)激勵(lì)多點(diǎn)拾取的方法。由于硬件條件有限,每次只能采用3個(gè)三向加速度傳感器采集信號(hào),每次取5次測試的平均值。試驗(yàn)采用的激振力錘型號(hào)為Kistler SN2075427;數(shù)據(jù)采集系統(tǒng)為搭載3個(gè)NI 9234采集模塊的NI Cdaq-9172;傳感器為BK 4525B型三向加速度傳感器,分析軟件為Modal-view模態(tài)分析軟件。
3.2 測試點(diǎn)選擇
考慮到主要是為了得到主床身和豎向工作臺(tái)基座的振型,故不在電機(jī)和電機(jī)座上布置傳感器。結(jié)合2.2中的測試點(diǎn)優(yōu)化結(jié)果,實(shí)際選取測試點(diǎn)為38個(gè)。圖4為試驗(yàn)現(xiàn)場照片。

圖4 試驗(yàn)現(xiàn)場
3.3 試驗(yàn)結(jié)果
對(duì)比理論分析,取前4階的固有頻率和振型。固有頻率、振型圖結(jié)果如圖5所示。
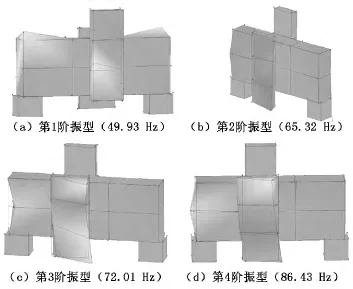
圖5 試驗(yàn)振型圖
4 試驗(yàn)結(jié)果分析
有限元分析結(jié)果和試驗(yàn)結(jié)果對(duì)照如表3所示。從表3可以看出試驗(yàn)結(jié)果與理論結(jié)果相差很小,說明測試點(diǎn)的優(yōu)化是可取的。從試驗(yàn)的第2、3、4階振型圖可以看出變形趨勢(shì)比較大的是配重塊支架,這從有限元分析結(jié)果也可以看出來。再從結(jié)構(gòu)上觀察發(fā)現(xiàn)配重塊支架前端和工作臺(tái)基座相連接的地方是板狀結(jié)構(gòu),抗變形能力差,故有待改進(jìn)。另外,由于該設(shè)備是試驗(yàn)臺(tái),需要在各個(gè)頻率段工作,然而該設(shè)備的低階固有頻率比較低,因此,固有頻率需要提高,以避免引起共振。

表3 有限元分析結(jié)果和試驗(yàn)結(jié)果
[1]Kammer D C.Sensor set expansion for modal vibration testing[J].Mechanical Systems and Signal Processing,2005,19(4):700-713.
[2]Hemez F M.Theoretical and experimental correlation between finite element models and modal tests in the context of large flexible space structures[D].Colorado:University of Colorado,1993:13-18.
[3]程建旗,閆維明,陳彥江,等.傳感器優(yōu)化布置的改進(jìn)有效獨(dú)立算法[J].振動(dòng)測試與診斷,2012,32(5):812-816.
[4]楊永亮.基于有限元的車床床身結(jié)構(gòu)優(yōu)化[D].大連:大連理工大學(xué),2006:8-10.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
計(jì)算物理(2014年2期)2014-03-11 17:01:39
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18