基于T-S型模糊神經網絡的空間結構GMM作動器主動控制
2016-01-28 03:06:17王社良代建波
振動與沖擊 2015年24期
關鍵詞:仿真
楊 濤, 王社良, 代建波
(1.西安建筑科技大學 土木工程學院,西安 710055;2.西安石油大學 機械工程學院,西安 710065)
?
基于T-S型模糊神經網絡的空間結構GMM作動器主動控制
楊濤1, 王社良1, 代建波2
(1.西安建筑科技大學 土木工程學院,西安710055;2.西安石油大學 機械工程學院,西安710065)
智能控制技術是能夠模仿人的智能行為的一種控制技術,它在應用中不需要建立基于系統動態特性的數學模型,從而為結構工程上解決非線性、時變、強耦合和不確定性等復雜的控制問題提供了新的途徑。近年來國內外學者通過模糊控制和神經網絡方法對土木工程中的振動控制進行了一些研究。Houssein等[1]利用模糊控制器對復合結構進行了控制,Fujitani等[2]進行了結構地震響應模糊控制的數值模擬分析和振動臺試驗;Pourzeynali等[3]應用模糊邏輯設計了高層結構的ATMD控制方案;Ghaboussi等[4]提出了神經網絡識別-控制器方案,并用來預測結構的動力反應;歐進萍等[5]采用磁流變阻尼控制裝置,對結構振動進行了模糊建模和模糊控制規則的提取,并進行了模糊控制的1∶10導管架式海洋平臺結構模型地震模擬振動臺試驗,效果良好。模糊控制易于獲得由語言表達的專家知識,能有效的控制難以建立精確模型而憑經驗可控制的系統,而神經網絡能夠映射任意函數關系[6],具有并行處理和自學習能力,二者結合可以改善模糊控制中隸屬度函數和模糊規則生成及調整過程中不完善和局限性問題,形成集學習、聯系、識別、自適應及模糊信息處理于一體的模糊神經網絡控制系統( Fuzzy Neural Network, FNN)。
超磁致伸縮材料(Giant Magnetostrictive Material,GMM)是一種智能材料,它在外加激勵磁場作用下,可高效地實現機械能與電磁能之間的轉換[7]。應用GMM制造的作動器具有響應速度快、磁機轉化效率高等優點。Braghin等[8]研究了低頻下的GMM作動器,提出了線性理論模型,并通過試驗對模型進行了驗證;Ohmate等[9]設計了三連桿臂型半主動振動控制裝置,可在3個直線或轉動方向產生可控的摩擦力和摩擦力矩,能夠抑制由于地震、強風等產生的振動。李琳等[10]從力學和磁學兩方面分析了GMM作動器內部結構形式對作動器特性的影響;徐峰等[11]制作了低頻動態特性好,諧頻影響小的主動振動控制GMM作動器;顧仲權等[12]系統研究了GMM作動器在振動主動控制中的應用。史霄等[13]利用GMM致動器建立了多自由度隔震系統。
本文主要針對自主研發的GMM作動器的控制特性,應用T-S型模糊神經網絡設計了主動控制系統,實現空間結構的主動控制,并對受控的空間結構模型進行地震響應的數值仿真分析,同時與標準型的模糊神經網絡的控制結果進行對比。
1GMM作動器性能簡介及狀態方程
1.1GMM作動器的設計

圖1 GMM作動器結構示意圖及實物圖Fig.1 GMM actuator structure schematic and real object
GMM元件在磁場的作用下發生形變從而對外輸出作動力與位移[14-15]。根據GMM材料特性,本文自主研發了GMM主動控制作動器,構造示意圖如圖1所示。GMM作動器包括GMM元件、外套筒、線圈骨架、偏置線圈、激勵線圈、探測線圈、作動桿和預壓碟簧等。磁場由勵磁繞組提供,大小由輸入勵磁繞組的電流進行控制。為提高其工作效率,設計了由高導磁率外套筒和GMM元件構成的閉合磁路,將磁通限制在外套筒之中,降低作動器的漏磁;通過預壓碟簧對GMM元件提供預壓力,提高作動器輸出量;作動桿端部設計為“弧形鉸”傳力裝置,減小由于制造裝配誤差及外部作用的橫向彎曲載荷等因素產生的彎矩;作動器兩端做成螺紋,方便連接。當激勵線圈通以電流信號時產生磁場,GMM元件發生變形,且變形效應通過作動桿輸出給被控對象,切斷電流信號磁場消失,變形恢復,磁場的變化可高頻率重復進行,重復此過程,即可實現對結構的主動抗震控制。
1.2GMM作動器性能試驗
在實驗室對GMM作動器進行力學性能測試,將直流穩壓電源與作動器連接,為其提供0~3A穩壓驅動電流。通電后由線圈產生的磁場驅動GMM變形,利用碟簧為GMM元件提供預壓力。試驗測試了不同預壓力下,電流與GMM作動器輸出控制力和位移的大小關系,如圖2、圖3所示。

圖2 GMM作動器控制力輸出測試Fig.2 GMM actuator output power tests

圖3 GMM作動器位移輸出測試Fig.3 GMM actuator output displacement test
圖4、圖5給出了不同預壓力下, GMM作動器輸入電流與輸出控制力、輸出位移的關系圖。由圖4、圖5可以看出,GMM作動器的輸入電流線與輸出控制力、輸出位移的線性度較好;在預壓力為6 MPa時,GMM作動器輸出控制力和位移均可達到最大值。

圖4 GMM作動器控制力輸出性能Fig.4 GMM actuator output power performance
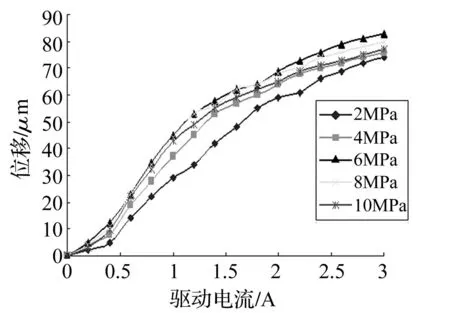
圖5 GMM作動器位移輸出性能Fig.5 GMM actuator output displacement performance
1.3基于GMM作動器桿件的動力學狀態方程
根據結構動力學原理,結構控制的動力學方程可表示為[16]:
(1)
(2)
式中:

M、C、K、Ds、Bs與式(1)相同;In∈Rn×n為單位矩陣;0為下角標標注維數的零矩陣。
2T-S型模糊神經網路控制系統設計
2.1模糊神經網絡控制系統的輸入與輸出
考慮由兩個輸入和一個輸出的二維模糊邏輯推理構成的控制系統,針對結構的地震響應控制和GMM作動器特點,選取作動器兩端節點的相對位移和相對速度為輸入變量,作動器的控制電流為輸出變量,控制作動器向被控對象輸出控制力的大小,從而實現對空間結構的主動控制。控制系統如圖6所示。
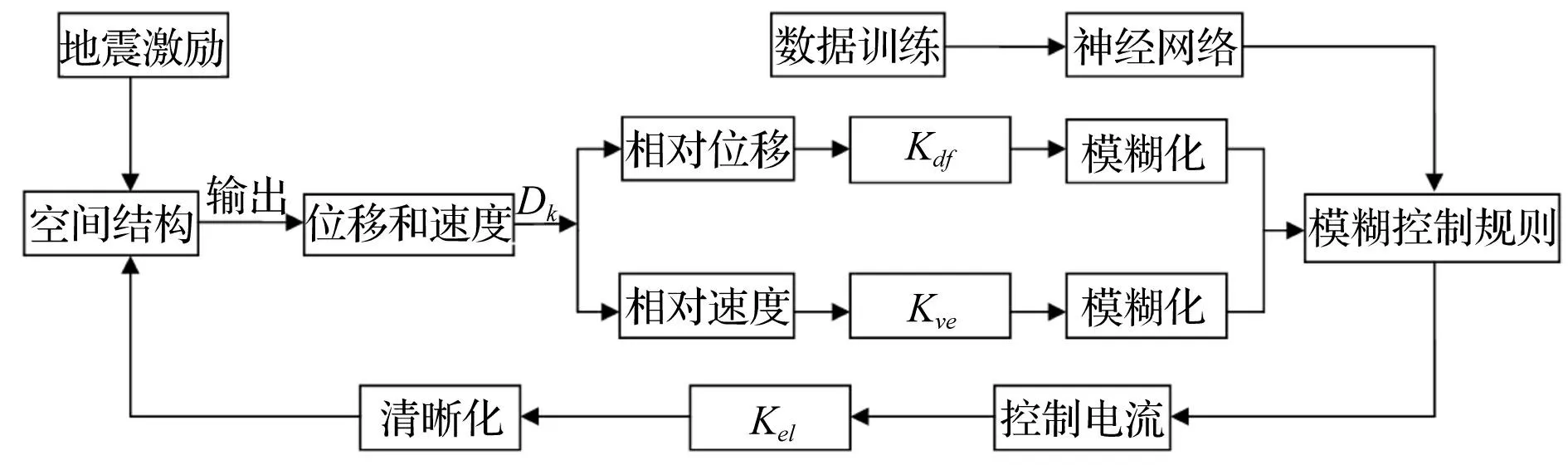
圖6 模糊神經網絡控制系統Fig.6 Fuzzy neural net work control system
2.2控制量的模糊化

(3)
在模糊論域內將相對位移對稱地映射為5個模糊狀態:NB(負大)、NS(負小)、ZE(零)、PS(正小)、PB(正大)。同理將輸入變量相對速度和輸出變量電流均劃分為5個模糊子集:[NB,NS,ZE,PS,PB]。
2.3基于T-S型的模糊神經網絡結構
基于T-S模型的模糊神經網絡結構如圖7所示。由該圖可以看出,該網絡由前件網絡和后件網絡兩部分組成[17-19]。

圖7 基于T-S模型的模糊神經網絡結構圖Fig.7 Structure of T-S type fuzzy neural network
(1) 前件網絡
第一層為輸入層。它的每個節點直接與輸入向量的各分量xi連接,它起著將輸入值x=[x1,x2,…,xn]T傳輸到下一層的作用。該層的節點數N1=n。


i=1,2,…,n;j=1,2,…,mi
(4)
式中:n是輸入的維數;mi是xi的模糊分割數。例如,若隸屬函數采用高斯函數表示的鈴形函數,則
(5)

第三層為模糊規則層。每個節點代表一條模糊規則,它是用來匹配模糊規則的前件,計算出每條規則的和適度,即
(6)
第四層的節點數與第三層相同,即N4=N3=m,它所實現的是歸一化計算,即
(7)
(2) 后件網絡
后件網絡由r個結構相同的并列子網絡所組成,每個子網絡產生一個輸出量。
第一層為輸入層。它將輸入變量傳送到第二層。輸入層第0個節點的輸入值x0=1,它的作用是 模糊規則后件的常數項。
第二層共有m個節點,每個節點代表一條規則,該層作用是計算每一條規則的后件,即

i=1,2,…,r,j=1,2,…,m
(8)
第三層為輸出層。它是計算系統的輸出,即
(9)


圖8 基于T-S模型的模糊神經網絡簡化結構圖Fig.8 Simplified structure of T-S type fuzzy neural network
3基于T-S模型的模糊神經網絡控制仿真分析
為了驗證建立的控制系統和控制策略的正確性和有效性,在不考慮噪聲的影響下,選取如圖9(a)所示的凱威特型單層球面網殼結構為模型,節點及桿件編號如圖9(b)所示,經優化后GMM作動器布置如圖9(c)所示。對模型在x 方向輸入一條加速度峰值為400 gal,持時20 s,時間間隔0.02 s的El-Centro地震波,進行仿真分析。所選凱威特模型跨度為20 m,矢高4.08 m,矢跨比0.204,型材均為Q235鋼,彈性模量E=206 GPa,密度ρ=7.8×103kg/m3,所有桿件均采用Φ60×3.5的鋼管,橫截面積A=6.12×10-4m2。
對凱威特型單層球面網殼結構模型進行振動控制時,首先對模糊神經網絡進行離線訓練,通過離線訓練確定其控制輸入的隸屬度函數,如圖10(a)、(b)、所示。同時根據模型結構地震響應控制特點,利用專家經驗,建立模糊控制規則,如表1所示,輸出特性曲面如圖11所示。

表1 模糊控制規則表

圖9 凱威特型單層球面網殼結構圖Fig.9 Kiewitt single-layer spherical shell structure

圖10 隸屬度函數曲線Fig.10 Membership function curve

圖11 模糊規則輸出特征曲面Fig.11 Output characteristic surface of fuzzy rules
基于以上T-S型模糊神經網絡及標準型模糊神經網絡控制器,根據優化后的作動器布置情況對凱威特模型結構進行主動控制。給出模型結構頂點O位置的位移和速度仿真結果,如表2和圖12、13所示。
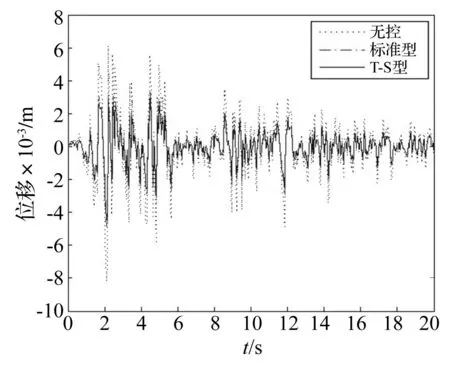
圖12 O點 x方向位移時程曲線對比Fig.12 The contrast curves of x-displacement of the O node

圖13 O點x方向速度時程曲線對比Fig.13 The contrast curves of x-speed of the O node
上述結果表明兩種模糊神經網絡模型對空間結構模型的控制都達到了良好的效果。其中,采用T-S型模糊神經網絡控制頂點O位置峰值位移比無控狀態下的峰值位移減小46.34%,峰值速度降低了33.04%;采用標準型模糊神經網絡控制頂點O位置峰值位移比無控狀態下峰值位移減小39.02%,峰值速度降低25.59%。由此可見兩種模糊神經網絡都能達到滿意的控制效果,但基于T-S型模糊神經網絡控制效果較好,并且其模糊推理計算簡單,仿真速度遠快于標準型模糊控制神經網絡,因而空間結構的主動控制采用T-S型模糊神經網絡更能滿足工程應用的要求。

表2 結構模型頂點仿真結果表
4結論
(1) 自主研發的GMM作動器在預壓力值為6MPa時輸出性能最好,且輸出作動力與輸入電流呈較好的線性關系,磁機轉化效率較高,驅動性能良好。
(2) 基于自主研發的GMM作動器的控制特性,應用T-S型模糊神經網絡設計了空間結構的主動控制系統,并對空間結構模型進行了El-Centro地震波的仿真分析,結果表明空間結構模型的節點位移和速度都得到了有效地控制,說明模糊神經網絡系統控制的有效性。
(3) 通過對兩種類型模糊神經網絡的仿真對比,可以看出二者對空間結構模型的控制效果都較為明顯,但基于T-S型模糊神經網絡控制效果較好,且推理過程更簡單,仿真速度更快捷。因此,空間結構的主動控制采用T-S型模糊神經網絡更能滿足工程應用的要求。
(4) T-S型模糊神經網絡不需要建立精確模型,通過對數據樣本的分析處理,可以得出良好的模糊控制規則。同時,神經網絡的在線學習能力,可對結構進行實時監控,在線反饋和調整控制規則,從而能夠建立魯棒性更好的模糊控制規則,達到快速、有效地對結構進行主動控制。
參 考 文 獻
[1] Houssein N, El-Hassania K K, Heng Hu, et al. Active vibration damping of composite structures using a nonlinear fuzzy controller[J]. Composite Structures, 2012, 94: 1385-1390.
[2] Fujtani H, Midorikawa Y. Seismic response control tests and simulations by fuzzy optimal logic of building structures[J]. Engineering Structure, 1998, 20(3): 164-175.
[3] Pourzeynali S, Lavasani A A, Modarayi A H.Active control of high rise building structures using fuzzy logic and genetic algorithms[J]. Engineering Structures, 2007, 26: 346-357.
[4] Ghaboussi J,Joghataie A. Active control of structures using neural networks[J]. ASCE Journal of Engineering Mechanics Division, 1995, 151(4): 555-567.
[5] 歐進萍,王剛,田石柱.海洋平臺結構振動的AMD主動控制試驗研究[J].高技術通訊,2002,12(10):85-90.
OU Jin-ping, WANG Gang, TIAN Shi-zhu. Experimental research on AMD control of structural vibration of offshore platform[J]. High Technology Letters, 2002, 12(10):85-90.
[6] 李宏男,李宏宇,董松員,等.基于模糊神經網絡系統的結構主動控制[J].沈陽建筑大學學報:自然科學版,2005,21(2):99-102.
LI Hong-nan, LI Hong-yu, DONG Song-yuan, et al. Active control of structures using fuzzy neural netwo RK[J]. Journal of Shenyang Arch. and Civ. ENG .Univ., 2005, 21(2): 99-102.
[7] 侯淑萍,楊慶新,陳海燕,等.超磁致伸縮材料的特性及其應用[J].兵器材料科學與工程,2008,31(5):95-98.
HOU Shu-ping, YANG Qing-xin, CHEN Hai-yan, et al. Characteristic and application of giant magnetostrictive material[J].Ordnance Material Science and Engineering,2008,31(5):95-98.
[8] Braghin F,Cinquemani S,Resta F. A model of magnetostrictive actuators for active vibration control[J]. Sensors and Actuators a: Physical, 2011, 165: 342-350.
[9] Ohmata K, Zakike M, Koh T. Hree-link arm type vibration control device using magnetostrictive actuators[J]. Journal of Alloys and Compounds, 1997, 258(1): 74-78.
[10] 李琳,陳亮良,楊勇.超磁致伸縮作動器的結構分析[J].北京航空航天大學學報,2013,39(9):74-78.
LI Lin, CHEN Liang-liang, YANG Yong. Structural analysis of giant magnetostrictive actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013,39(9):74-78.
[11] 徐峰,張虎,蔣成保,等.超磁致伸縮材料作動器的研制及特性分析[J].航空學報,2002,23(6):552-555.
XU Feng, ZHANG Hu, JIANG Cheng-bao, et al. Designing and performance research of giant magnetostrctive actuator[J]. Acta Aeronatutica ET Astronautica Sinica, 2002,23(6):552-555.
[12] 顧仲權,朱金才,彭福軍,等.磁致仲縮材料作動器在振動主動控制中的應用研究[J].振動工程學報,1998,11(4):381-388.
GU Zhong-quan, ZHU Jin-cai, PENG Fu-jun,et al.Study on the application of magnetostrictive actuator for active vibration control[J]. Journal of Vibration Engineering,1998,11(4):381-388.
[13] 史霄.多自由隔振平臺微振動混合控制研究[D].深圳:哈爾濱工業大學,2010.
[14] 楊興,賈振元,郭東明.超磁致伸縮材料的伸縮特性及其磁感應強度控制原理及方法的實現[J].電工技術學報,2001,16(5):55-58.
YANG Xing, JIA Zhen-yuan, GUO Dong-ming. The elastic characteristic of the giant magnetostrictive materials and the realization of its control principle based on magnetic induction[J]. Transactions of China Electortechnical Society, 2001, 16(5): 55-58.
[15] Gros L, Reyne G, Body C. Strong coupling magneto mechanical applied to model heavy magnetosirictive actuators[J]. IEEE Transactions on Magnetics, 1998, 34(5): 3150-3153.
[16] 歐進萍.結構振動控制-主動、半主動和智能控制[M].北京:科學出版社,2003:39-40.
[17] 姜長生,王從慶,魏海坤,等.智能控制與應用[M].北京:科學出版社,2007:304-308.
[18] 李國勇.智能控制及其MATLAB實現[M].北京:電子工業出版社,2005:273-279.
[19] Chen K T, Chou C H, Chang S H, et al. Adaptive fuzzy neural network control on the acoustic field in a duct[J]. Applied Acoustics, 2008, 69(6): 558-565.
第一作者 楊濤 男,博士生,1984年6月生
摘要:基于自主研發的超磁致伸縮材料(Giant Magnetostrictive Material,GMM)作動器的主動控制特性,應用T-S(Takagi-Sugeno)型模糊神經網絡設計了主動控制系統,該系統以GMM作動器兩端節點的相對速度和相對位移作為輸入,計算輸出控制電流。通過神經網絡的自適應學習功能進行模糊劃分及生成模糊規則,利用模糊系統的推理能力對空間結構模型進行基于地震響應的主動控制仿真,同時與標準型模糊神經網絡系統進行仿真對比。結果表明,二者對空間結構模型的主動控制都能達到良好效果,基于T-S型模糊神經網絡推理簡單,其仿真速度遠快于標準型。因此,采用T-S型模糊神經網絡對空間結構進行主動控制更能滿足工程應用需求。
關鍵詞:GMM作動器;模糊神經網絡;主動控制;仿真;空間結構
Active control of spatial structure based on GMM actuator and T-S type fuzzy neural network
YANGTao1,WANGShe-liang1,DAIJian-bo2(1. College of Civil Eng, Xi’an Univ of Architecture and Technology, Xi’an 710055, China; 2. College of Mechanical Eng, Xi’an Shiyou Univ, Xi’an 710065, China)
Abstract:Based on independently developed Giant Magnetostrictive Material (GMM) active control actuator, a Takagi-Sugeno (T-S) fuzzy neural network control system of a spatial structure was designed, in which the relative displacement and relative speed of two nodes at the end of the active-member were taken as inputs, and the output control current was calculated by the network. Taking advantage of the adaptive neural network learning function to achieve the fuzzy division and to generate fuzzy rules, an active control simulation of the spatial structure model under the action of seismic response by using the fuzzy reasoning capability, was carried out and the results were compared with the results produced by the simulation of a corresponding standard fuzzy neural network model. The results demonstrate that both the models can achieve good control effects, but the simulation speed of the T-S fuzzy neural network is far faster than the standard model. Therefore, the T-S fuzzy neural network controller can better meet the needs of engineering application requirements.
Key words:GMM active control actuator; fuzzy neural network; active control; simulation; spatial structure
中圖分類號:TU32;TP273
文獻標志碼:A DOI:10.13465/j.cnki.jvs.2015.24.001
通信作者王社良 男,教授,博士生導師,1956年11月生
收稿日期:2014-12-03修改稿收到日期:2015-03-02
基金項目:國家自然科學基金 (51178388,51108035);國家重點實驗室開放項目(08KF02);陜西省工業攻關項目(2013K07-07,2014K06-34);西安建筑科技大學創新團隊資助項目
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49