基于虛擬同步發電機的離網型三相逆變器控制研究*
2016-01-28 09:43:24李浩然楊旭紅
電機與控制應用 2015年12期
李浩然, 楊旭紅
(上海電力學院 自動化工程學院,上海市電站自動化技術重點實驗室,上海 200090)
?
基于虛擬同步發電機的離網型三相逆變器控制研究*
李浩然,楊旭紅
(上海電力學院 自動化工程學院,上海市電站自動化技術重點實驗室,上海200090)
摘要:針對傳統三相逆變器控制,在借助虛擬同步發電機二階暫態數學模型的基礎上,利用電容電壓和電容電流反饋,與虛擬同步發電機構成功率-電壓-電流三環控制。其中,電容電壓環采用比例積分控制,保證穩態無誤差;并使控制系統具有下垂特性,以及同步發電機轉子慣性的特性,提高頻率的穩定性。在分析虛擬同步發電機原理的基礎上,詳細分析了電壓電流雙環控制參數的整定和等效輸出阻抗的計算。利用小信號分析法,詳細分析了轉動慣量、有功系數和無功系數對系統穩定性的影響。最后由仿真結果表明所提策略的正確性和有效性。
關鍵詞:虛擬同步發電機; 三相逆變器; 雙環控制; 轉動慣量
0引言
新能源如太陽能、風能等受到越來越多的關注,以其清潔無污染和蘊含量極其豐富等特點,不斷為各國所利用和研究。由于絕大多數分布式能源都要通過逆變器接入電網,因此,逆變器控制技術是分布式能源能否高效實施和利用的一個非常重要的技術[1]。
目前,逆變器控制技術發展迅猛,在直接電流控制中,有PI控制、重復控制、模糊控制等,這些都是在三相逆變器并網情況下,直接對并網電流進行控制,研究的重點在于并網穩態過程。功率控制中,PQ控制也是通過對輸出電流控制進而控制進網功率。下垂控制則是基于同步發電機外特性的控制方法,能夠在孤島模式和并網模式下運行,并較多地應用在逆變器并聯控制技術當中,實現功率均分[2]。
虛擬同步發電機(Virtual Synchronous Generator, VSG)控制技術是根據傳統同步發電機控制技術而產生的一項新興控制技術,下垂控制僅模擬了同步發電機的外特性,并沒有同步發電機的大慣性和高輸出阻抗等特點。文獻[3]在VSG基礎上,提出一種在線計算電壓控制器參考輸入電壓新算法,補償VSG固有下垂特性和線路阻抗的電壓跌落,保證了VSG按照設定的U-Q下垂特性運行[3]。文獻[4]在VSG模型基礎上,將大電網中的一次調頻和二次調頻等理論引入到微電網,給出聯網運行和孤島運行模式下微電網的控制方法[4]。文獻[5]設計了原動機調節和勵磁調節,并模擬同步發電機的轉動慣量,解決了傳統逆變器運行時輸出阻抗小、阻尼小等問題[5]。
本文在基于VSG二階機電暫態模型的基礎上,設計了功率-電壓-電流三環控制結構,其中電壓環和電流環分別為電容電壓和電容電流反饋,可以提高系統穩定性,避免負載電流擾動對系統的影響。電壓反饋環采用比例積分控制,以實現電壓的零穩態誤差控制,同時使系統還能具有較快的動態響應性能。電壓環輸出為電流環參考電流,電流環采用比例控制,以提高響應速度。在詳細分析控制參數整定下,同時詳細分析了系統的輸出阻抗,利用小信號分析法討論了轉動慣量、有功系數和無功系數對系統性能的影響。最后對三環控制系統進行一次調頻和二次調頻,并進行仿真,驗證該控制方法可行性。
1VSG模型
同步發電機根據不同的簡化,有二階模型、三階模型、五階模型等。為避免同步發電機復雜的電磁耦合關系,以同步發電機二階模型作為VSG的控制算法[6-7]。假設同步發電機為隱極式同步發電機,極對數為1,其數學模型為
(1)


R——定子電樞電阻;
X——同步電抗;
J——轉動慣量;
ω——電角速度;
Pm——機械功率;
Pe——電磁功率;
D——阻尼系數(本文取零);
Δω——額定電角速度與實際電角速度之差。
因同步發電機輸出頻率變化很小,可做式(1)的近似處理[8]。
三相逆變器在VSG算法下的框圖結構如圖1所示。

圖1 三相逆變器整體控制框圖
基于式(1)同步發電機的數學模型,可得VSG的本體算法框圖如圖2所示。根據由虛擬原動機得到的機械功率Pm、輸出有功功率Pe及轉動慣量J,得到電容電壓的指令值uref[9-10]。該算法避免了真實同步發電機中復雜的電磁耦合關系,減弱了有功功率和無功功率控制的耦合性[11];并且,可根據實際要求,靈活選取轉動慣量等關鍵參數。

圖2 VSG本體算法
為使逆變器在孤島模式下具有較快的動態特性和抗干擾能力,本文采用帶電壓環和電流環的雙環控制。其中,外環為電容電壓環,內環為電容電流環。雙環控制如圖3所示。
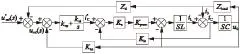
圖3 雙環控制框圖

2控制器設計
2.1調速器和勵磁控制器
由于同步發電機的輸出阻抗及線路阻抗呈感性,同步發電機的輸出呈現下垂特性,即輸出有功功率與功角呈線性關系,無功功率與電壓呈線性關系。當頻率設定值不變時,同步發電機輸入機械功率隨著系統頻率的減小(增大)而增大(減小),最終維持頻率的穩定,此即電力系統的一次調頻過程[12]。定義同步發電機有功功率-頻率調差系數m為
(2)
調差系數的大小標志著頻率變化時同步發電機輸入機械功率變化量的多少,m越大輸入機械功率變化量越小。VSG輸入機械功率為
(3)
在勵磁控制器作用下,同步發電機的靜態無功功率-電壓亦呈現下垂特性。隨著輸出無功的增大(減小),同步發電機的勵磁電動勢將減小(增大),此即電力系統一次調壓過程[13-14]。定義無功功率-電壓調差系數n:
(4)
調差系數n的大小標志輸出無功功率變化時同步發電機勵磁電動勢變化的多少,n越大勵磁電動勢變化量越大。
一次調頻調壓屬于有差調節,頻率和電壓的變化都在額定范圍內[15]。當負載突變超出頻率或電壓額定范圍時,此時必須要進行二次調節。此過程即是將有功-頻率和無功-電壓下垂特性曲線向上或者向下進行平移,使頻率和電壓恢復到額定值或在額定范圍內[16-17]。
2.2雙環控制器設計與分析
對于雙環控制,采取將三相靜止坐標系轉換到兩相旋轉坐標系上,從而對電壓電流進行控制。
對于電流環部分,由圖3可得電流環部分的傳遞函數:
(5)

對于電壓環,其截止頻率應當小于電流環,且將電流環簡化為增益為1的比例環。根據圖3可知,則電壓外環的傳遞函數為
(6)


圖4 電壓環和電流環伯德圖
2.3等效輸出阻抗計算
為簡化分析,首先計算控制器等效輸出阻抗,即先不計及定子阻抗Zd。
根據圖3可得
(7)
A=LCs3+KicKeKpwmCs2+(1+KucKeKupKpwm)s+
KucKuiKeKpwm
則逆變器等效輸出阻抗:
(8)
(9)
Δ=LCs3+KeKpwmCs2+(1+KupKeKpwm)s+
KuiKeKpwm
由于濾波電容數量級較小,對式(9)計算結果影響較小,則有
(10)

3穩定性分析
VSG輸出有功功率P和無功功率Q。
(11)
式中:R——等效阻抗;
X——電抗;
E——勵磁電壓;
U——定子端電壓。
利用小信號分析,有
ΔPe=kpeΔE+kpδΔδ
(12)
ΔQe=kqeΔE+kqδΔδ
(13)
式中參數具體如下:




由圖2和式(3)可知,在功率反饋加入低通濾波器時,有
(14)
則有
(15)
(16)
式中:m、n——有功下垂系數和無功下垂系數;
ω0——基準參考角頻率;
ωc——低通濾波器截止頻率。
經計算有
as4Δδ+bs3Δδ+cs2Δδ+dsΔδ+eΔδ=0
(17)
其中:a=mJω0
b=mJω0ωc(2+nkqe)+1
單機運行時,取穩定運行點m=n=0.0001,J=0.5kg·m2,R=0.1Ω,X=0.015Ω,δ=0.00673,ωc=10rad/s,ω0=314rad/s,E=216V,U=214V。保持其他參數不變,改變轉動慣量、有功下垂數和無功下垂系數時特征方程的根軌跡如圖5所示。



圖5 根軌跡
由圖5(a)可知,隨著轉動慣量J的增大,離虛軸較近的兩個共軛復根逐漸趨向于原點,說明系統的動態性能變差,衰減變慢,達到穩態的時間變長;且J逐漸越過虛軸,此時系統在虛軸右部存在極點,系統已不穩定。因此J的選擇不宜過大或者過小。由圖5(b)可知,隨著有功系數的增大,系統的兩對共軛復根均靠近虛軸且遠離實軸,系統阻尼系數減小,系統的響應超調量會變大,動態響應過程時間會增加。即當有功下垂系數較大、有功調節過快時,易引起系統不穩定。由圖5(c)可知無功下垂系數對系統的影響,其與有功下垂系數對系統影響大體相同。隨著無功系數的增大,靠近虛軸的一對共軛復根逐漸變成主導極點,影響系統的主要性能。無功系數越大,阻尼系數越小,系統振蕩加劇,超調量也變大。
4仿真分析
為了驗證本文所提VSG模型控制方法的可行性,在MATLAB/Simulink環境下搭建了仿真模型。具體參數設置如表1所示。
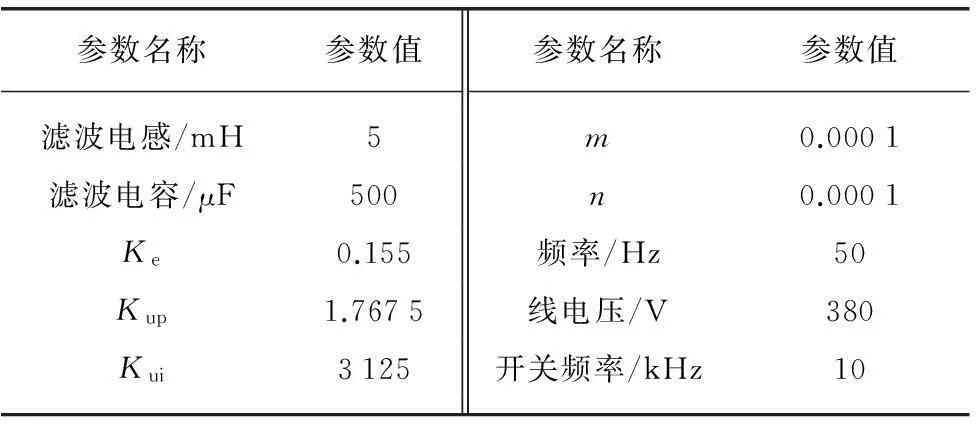
表1 仿真參數設置
VSG一個很重要的特性就是具有大慣性的特點,在數學模型中的表現形式即為轉動慣量J。首先根據仿真結果分析轉動慣量對系統的影響。系統首先帶10kW+5kvar的阻感性負載,并達到穩態,如圖6所示。
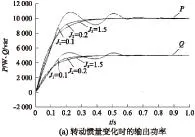
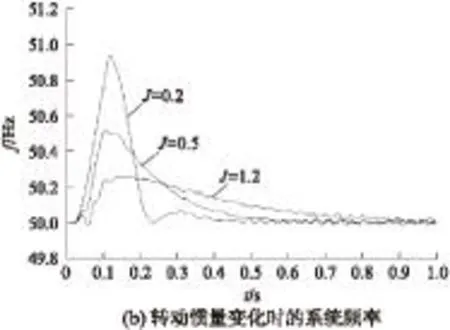
圖6 轉動慣量變化時的輸出功率和系統頻率
由圖6可以看出,當轉動慣量取不同值時,輸出有功功率和無功功率以及系統頻率達到穩態時的時間是不一樣的。頻率剛開始高于額定頻率,是因為開始階段輸出功率未達到指令值,頻率升高。這符合一次調頻。當轉動慣量取值越小時,即系統的慣性越小,輸出功率達到額定功率時的快速性越好,但伴隨著一定的超調量和振蕩。慣性越大時,達到穩態的時間越長。對于頻率,慣性越小,其達到穩態的時間越短,但其超調量也越大。隨著轉動慣量的增大,其超調量變小,對系統沖擊變小,但達到穩態的時間也變長,符合慣性的基本原理。由于此處的慣性其實是虛擬的轉動慣量,故在滿足要求的情況下可以任意取適當的值。
在1s時,增加4kW+4kvar的阻感性負載,則輸出功率以及頻率變化如圖7所示。
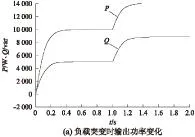

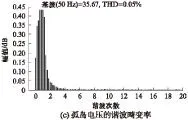
圖7 負載突變時輸出功率及頻率變化
負載突變時,根據一次調頻原理,系統將調節系統頻率或電壓以增加或減少輸出有功和無功。負載增加4kW+4kvar時,系統頻率和電壓下降,以增加輸出有功功率和無功功率。由圖7(b)可看出,以有功-頻率調節為例,有功增加4kW,系統頻率下降了0.4Hz,頻率變化在±0.2~0.5Hz范圍內。由于下垂系數為0.0001,計算可得頻率下降所增發的有功功率即為新增負載所消耗的有功功率。由圖7(c)可知,孤島電壓的諧波畸變率為0.05%。在孤島模式下,雙環控制能夠保證電壓質量,控制效果良好。
當頻率變化超出±0.5Hz時,系統必須進行二次調頻。設定突變負載為7kW+4kvar,額定負載不變。輸出功率及頻率變化如圖8所示。
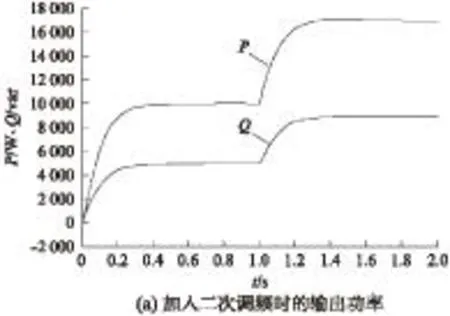

圖8 加入二次調頻時,輸出功率及頻率變化
由圖8看出,系統輸出有功為17kW,若不加入二次調頻,系統頻率將下降0.7Hz,超出額定范圍。此時系統檢測到頻率超出額定范圍,立即啟動二次調頻,在較短時間內,將頻率變化控制在額定范圍內,并保持功率輸出滿足負荷要求。由此證明本文所采用的三環控制在一次調節和二次調節時的有效性。
本文在VSG暫態二階數學模型的基礎上,采用電容電壓和電容電流反饋控制,與虛擬同步發電機算法構成三環控制。在孤島模式下,使系統具有下垂特性,從而具有一次調頻調壓的功能。對輸出等效阻抗進行了詳細計算分析,在同步電抗取值和濾波電感的條件下,輸出等效定子阻抗近似等于同步電抗。仿真分析了轉動慣量對于系統的影響。轉動慣量越大,系統的超調量越小,但調節時間變長。由于系統具備一次調頻功能,在負載突變時,系統降低頻率以提高輸出頻率,且頻率變化在標準范圍內。由仿真結果可得,雙環控制下,孤島下電壓畸變率極低,保證了供電電壓質量。
【參 考 文 獻】
[1]張瑩,張揚.LCL濾波型風電并網變流器的研究[J].電機與控制應用,2011,38(7): 26-29.
[2]李浩然,楊旭紅,薛陽,等.基于模糊PI參數自整定和重復控制的三相逆變器并網研究[J].電機與控制應用,2015,42(2): 31-36.
[3]楊向真,蘇建徽,丁明,等.面向多逆變器的微電網電壓控制策略[J].中國電機工程學報,2012,32(7): 7-13.
[4]朱丹,蘇建徽,吳蓓蓓.基于虛擬同步發電機的微電網控制方法研究[J].電氣自動化,2010,32(4): 59-62.
[5]張玉治,張輝,賀大為,等.具有同步發電機特性的微電網逆變器控制[J].電工技術學報,2014,29(7): 261-268.
[6]王思耕,葛寶明,畢大強.基于虛擬同步發電機的風電場并網控制研究[J].電力系統保護與控制,2011,39(21): 49-54.
[7]王文帝,徐青山,丁茂生,等.基于小信號建模的微電網下垂控制穩定性分析[J].現代電力,2014,31(3): 17-21.
[8]KIM J, GUERRERO J M, RODRIGUEZ P, et al.Mode adaptive droop control with virtual output impedances for an inverter-based flexible AC microgrid[J]. Power Electronics, IEEE Transactions on, 2011, 26(3): 689-701.
[9]劉真,鮑薇.微電網中基于復合虛擬阻抗的同步電壓源控制策略研究[J].現代電力,2014(2): 60-65.
[10]王成山,高菲,李鵬,等.低壓微網控制策略研究[J].中國電機工程學報,2012,32(25): 2-8.
[11]關雅娟,鄔偉揚,郭小強.微電網中三相逆變器孤島運行控制技術[J].中國電機工程學報,2011,31(33): 52-60.
[12]VANDOORN T L, MEERSMAN B, DE KOONING J D M, et al. Transition from islanded to grid-connected mode of microgrids with voltage-based droop control[J]. Power Systems, IEEE Transactions on, 2013, 28(3): 2545-2553.
[13]馬添翼,金新民,黃杏.含多變流器的微電網建模與穩定性分析[J].電力系統自動化,2013,37(6): 12-17.
[14]LEE C, CHU C, CHENG P. A new droop control method for the autonomous operation of distributed energy resource interface converters[J]. Power Electronics, IEEE Transactions on, 2013, 28(4): 1980-1993.
[15]PLANAS E, GIL-dE-MURO A, ANDREU J, et al.Design and implementation of a droop control in d-q frame for islanded microgrids[J]. Renewable Power Generation, IET, 2013, 7(5): 458-474.
[16]杜燕,蘇建徽,張榴晨,等.一種模式自適應的微網調頻控制方法[J].中國電機工程學報,2013,33(10): 1-10.
[17]呂志鵬,盛萬興,鐘慶昌,等.虛擬同步發電機及其在微電網中的應用[J].中國電機工程學報,2014,34(16): 2951-2963.
[期刊榮譽]
中文核心期刊中國科技核心期刊中國學術期刊(光盤版)
全國優秀科技期刊華東優秀科技期刊
中國科學引文數據庫來源期刊中國學術期刊綜合評價數據庫來源期刊
*基金項目: 上海市科技創新行動技術高新技術領域重點項目(14511101200);上海市自然科學基金資助項目(13ZR1417800);上海市電站自動化技術重點實驗室開放課題(13DZ2273800);上海市重點科技攻關計劃(14110500700)
Control Research on the Three-Phase Inverter Based on
Virtual Synchronous Generator in Islanded Mode
LIHaoran,YANGXuhong
(Shanghai Key Laboratory of Power Station Automation Technology, Automatic Engineering college,
Shanghai University of Electric Power, Shanghai 200090, China)
Abstract:According to the traditional control of three-phase inverter, basing on the transient mathematical model of second order of virtual synchronous generator, the three loops control of power-voltage-current with virtual synchronous generator (VSG) by using the feedback of capacitance’s voltage and current was built. And the proportional and integral control was applied in the loop of voltage to ensure zero steady-state error. In the meantime,the control system has droop characteristic and virtual inertia as synchronous generator rotors. So the stability of frequency could be improved. The theory of VSG was analyzed firstly, and then the analysis of parameters tuning of voltage-current control and calculation of equivalent output impedance were given. Then, the effects of moment of inertia, active power coefficient and reactive power coefficient on system stability were analyzed in detail by using small signal analysis method. In the end, the simulation results showed that the control strategy was feasible and effective.
Key words:virtual synchronous generator; three-phase inverter; double-loop control; rotary inertia
收稿日期:2015-07-08
中圖分類號:TM 921
文獻標志碼:A
文章編號:1673-6540(2015)12- 0043- 07
通訊作者:楊旭紅