臨近空間高超聲速目標自適應采樣跟蹤算法*
2016-02-24 08:55:50李凡畢紅葵段敏喻晨龍
現代防御技術 2016年6期
關鍵詞:模型
李凡,畢紅葵,段敏,喻晨龍
(1.空軍預警學院 研究生管理大隊,湖北 武漢 430019; 2.空軍預警學院,湖北 武漢 430019)
探測跟蹤技術
臨近空間高超聲速目標自適應采樣跟蹤算法*
李凡1,畢紅葵2,段敏2,喻晨龍1
(1.空軍預警學院 研究生管理大隊,湖北 武漢 430019; 2.空軍預警學院,湖北 武漢 430019)
針對傳統自適應采樣跟蹤準則只適用單一模型且采樣率穩定性差的問題,提出一種基于相對機動強度(relative maneuvering strength, RMS)的自適應采樣交互多模型(interacting multiple model,IMM)算法。該算法構建了機動靈敏的主導因子;將期望協方差與實際協方差的偏差與門限值進行比較來修正指數參數,在保證跟蹤精度恒定的同時降低資源消耗;考慮到采樣率穩定性因素,引入平滑因子,設計線性形式自適應采樣率公式。通過仿真試驗對比,結果表明3種對比算法跟蹤精度相近,新算法采樣點數少,采樣率突變點少。以此驗證了新算法在跟蹤數據率和采樣率穩定性方面的優越性。
臨近空間;高超聲速目標;自適應采樣;相對機動強度;交互多模型;跟蹤數據率
0 引言
近年來,臨近空間高超聲速飛行器(near space hypersonic target, NSHT)屢次發射引起世界各國關注[1]。NSHT具有廣闊的軍事應用前景,其高、快、小的特點,為進攻性武器的研究與運用開辟了一個新的領域。
目前,高速高機動目標跟蹤算法已有較多成果,且主要集中于IMM算法[2],但是專門針對NSHT的跟蹤算法相對較少。文獻[3]提出一種IMM算法跟蹤NSHT的思路;文獻[4]基于IMM算法提出3種變結構多模型(variable structure multiple model, VSMM)算法,通過自適應模型集選取解決模型競爭和計算量的問題。上述算法對于NSHT跟蹤有一定的改進效果,但是跟蹤采樣間隔時間固定,停留在邊掃描邊跟蹤(track while scanning, TWS)的思路上。針對這些問題,基于單個運動模型方面,文獻[5-7]分別提出適應勻速(constant velocity, CV)、勻加速(constant acceleration, CA)、Singer模型特點的自適應采樣公式,只針對特定模型,采樣率穩定性較差,容易出現突變點。基于期望協方差方面,文獻[8]提出以期望協方差為參數優化的約束條件,同時調整采樣間隔與駐留時間,但發現概率設定較大時會出現多個無效的測量;文獻[9]提出協方差偏差均值最小和最大協方差偏差最小準則,合理控制下一時刻搜索、跟蹤模式,并提出2種準則評估協方差偏差程度,實現對搜索參數以及跟蹤參數優化,但算法假設駐留時間足夠大;文獻[10]提出使用后驗克拉美羅矩陣的跡與門限比較,通過加減固定的時間步進來自適應調整采樣間隔,但是算法時間步進確定較為困難,當機動突變時采樣率變化較慢、適應性較差;文獻[11]提出將灰色關聯度引入到以采樣間隔為粒子的粒子群優化中,提高跟蹤精度的同時減少觀測點數達到優化雷達資源管控的目的[12],但是粒子群很難得到全局最優結果。
本文采取跟蹤加搜索(track add search, TAS)[13]方式跟蹤NSHT,基于目標機動強度分析,提出一種RMS-IMM自適應采樣跟蹤算法,實現采樣率的自適應調整。該算法從采樣率靈敏度和穩定性的角度進行理論分析,設計靈敏的主導因子,通過修正主導因子的指數參數保持跟蹤精度恒定,引入平滑因子提高采樣率自適應調整過程中穩定性,仿真結果表明RMS-IMM算法機動適應性、采樣率穩定性優于傳統自適應采樣率算法的。
1 IMM算法
IMM算法[14]主要包括多個模型濾波以及模型交互計算2個部分。使用不同的運動模型對系統進行預測,根據馬爾可夫鏈的狀態轉移矩陣,計算各模型系統的可能性作為權值,對各模型濾波結果進行加權和得到IMM算法的濾波輸出。
步驟 1: 模型狀態交互輸入
(1)


(2)
步驟 2: 模型可能性計算
假定Z(k)為k時刻的量測值,模型j在k時刻的濾波殘差為vj(k),其協方差為Sj(k),則模型j的可能性為
(3)

(4)

(5)
步驟 3: 模型概率更新
(6)
步驟 4: 交互輸出
(7)

(8)
文獻[6]提出CA模型的自適應采樣遞推公式。目標機動較弱時,跟蹤精度趨于穩定,平滑過的位置殘差小于觀測噪聲標準差,導致采樣間隔增大,跟蹤精度降低,當濾波殘差超越量測噪聲時,采樣間隔會立即降低,出現采樣率突變點。CA自適應采樣準則對復雜運動的適應性較差。文獻[7]基于期望的預測精度和穩態的卡爾曼濾波條件下給出了Singer的自適應變采樣公式,式中先驗參數較多,受環境噪聲影響較大,采樣率穩定性較差。上述2種自適應采樣準則容易出現采樣率突變點、穩定性較差。并且都是針對特定模型,難以運用到IMM算法中。
2 RMS自適應采樣準則
針對上述單模型自適應采樣準則在IMM算法[14]中的適應性問題,以相鄰k-1和k2個時刻殘差描述k時刻相對于k-1時刻目標機動強度。構造對機動強度變化反應靈敏的主導因子;通過預測協方差與期望協方差偏差修正指數參數;引入跟蹤精度與位置誤差調整平滑因子[15],提高跟蹤過程中采樣率的穩定性,減少采樣率突變點。在實際跟蹤過程中往往更加關注目標的位置信息,基于IMM算法濾波加權和的思想,對各模型濾波位置殘差加權和作為當前時刻混合位置殘差。
(9)
(10)

式(10)中,當目標機動較強時,濾波殘差增大導致σ2(k)>σ(k-1)σr,采樣間隔T(k)減小,采樣率增大;當目標機動較弱時σ2(k)<σ(k-1)σr,T(k)增大,采樣率減小;當目標近似勻速運動時σ2(k)≈σ(k-1)σr,濾波殘差趨于平穩,T(k)變化較小,采樣率保持恒定[16-17],避免出現CA自適應準則在弱機動時采樣間隔不斷增大的問題。
考慮到算法指數參數κ(k)/2對下一時刻采樣間隔影響較大,為實現不同采樣時間點跟蹤精度維持在一個較為穩定的水平,防止因采樣間隔單次調整偏差較大導致后續跟蹤精度降低[17],通過絕對值求積衡量指數參數κ(k)/2下實際協方差與期望協方差偏差[10]:
ΔP(k)=tr‖P(k|k)-Pe‖,
(11)
式中:Pe為期望協方差;ΔP(k)反映當前時刻自適應采樣間隔時間調整的準確性,基于ΔP(k)與門限值α比較修正κ(k)/2取值[11],保證跟蹤精度誤差在一定范圍內。

(12)
Δκ為指數參數步進,在不嚴重影響機動強度分析的同時微調κ(k)/2修正采樣間隔。當ΔP(k)小于α時,采樣間隔T(k)高于跟蹤精度要求,通過參數調整適當增大T(k),減小計算資源浪費;當ΔP(k)大于α時,T(k)低于跟蹤精度要求,減小T(k)增大采樣率,降低濾波位置誤差防止跟蹤失敗。
T(k)=βT1(k-1)+(1-β)T2(k-1),
(13)

式(13)以平滑系數構建一個線性自適應變采樣率公式,兼顧采樣率高靈敏性與魯棒性要求。T1(k)為主導因子,機動強度分析采用指數形式能快速調整下一時刻采樣間隔,反映機動強度變化趨勢,通過協方差偏差門線比較修正指數參數κ(k)/2,保證跟蹤精度穩定。針對指數形式主導因子穩定性較差容易出現采樣率突變點的問題,加入平滑因子T2(k),以線性形式抑制機動突變導致的采樣率急劇變化,解決采樣率突變的問題[6-7]。
3 仿真驗證
假定NSHT在15 km的高度由載機以Ma數1釋放,經過助推、翻轉后,超燃沖壓發動機開始工作進入高速巡航段,其中有動力跳躍3次、無動力滑翔跳躍2次。最大飛行Ma數5.5,最大巡航高度50.85 km,最大加速度4.01g,最大的角速度0.024 rad/s,全程飛行1 024 s,航程1 557 km。
3.1 仿真場景1

從圖1可以看出采用不同自適應采樣準則的跟蹤濾波軌跡RMS-IMM算法與CA以及Singer自適應采樣算法都能實現目標跟蹤。當目標運動較為穩定機動較弱時,自適應采樣算法采樣點稀疏;目標處于跳躍節點或者機動較強時,采樣點較為密集。RMS-IMM算法基于機動強度自適應調整采樣間隔使采樣點分布更加合理,機動較弱的巡航滑翔段采樣點間隔較大,在“蛇形”跳躍的峰值和谷值位置采樣間隔較小。此外,由圖2可知,RMS-IMM算法與CA,Singer自適應采樣算法位置RMSE整體水平相當,CA與Singer自適應采樣算法出現多個誤差尖峰,RMS-IMM算法相對突變點較少,整體水平較為均衡。

圖1 濾波軌跡與真實值比較Fig.1 Comparison between tracking result and real value
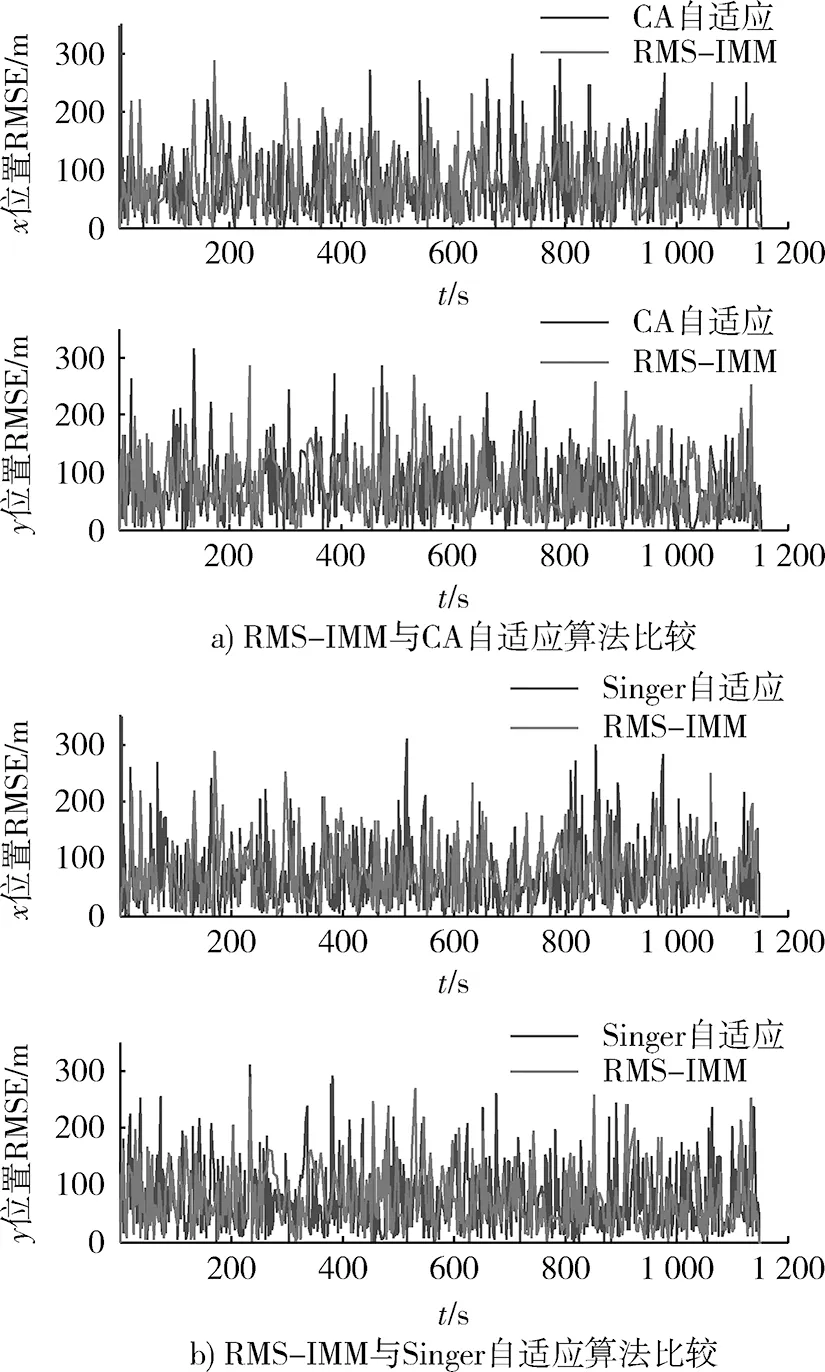
圖2 σx=100 m,σy=100 m時濾波結果Fig.2 Comparison of tracking result when σx=100 m and σy=100 m
圖3反映了3種自適應采樣準則在不同時刻的采樣率。可以看到RMS-IMM,CA,Singer自適應準則根據目標運動狀態自適應調整采樣率,機動較強的跳躍轉彎時刻采樣率上升,機動較弱時采樣率較低。針對濾波初期采樣間隔初值設置不合理的問題,CA,Singer自適應變采樣算法收斂速度較慢,采樣率出現多個沖擊點。RMS-IMM基于指數形式的主導因子能快速收斂到較為合適的采樣間隔,對指數參數的修正減小單次采樣率調整偏差導致誤差累積,避免在轉彎機動時刻采樣率尖峰點的問題。此外,RMS-IMM自適應采樣準則引入平滑因子提高了采樣率穩定性。總體上,RMS-IMM采樣率隨目標機動強度變化趨勢明顯,采樣率曲線平滑,魯棒性較好;CA自適應采樣準則次之,在目標機動時采樣率容易出現突變點;Singer自適應采樣準則效果較差,采樣間隔計算收斂速度較慢,受噪聲隨機影響較大,突變點數量較多。
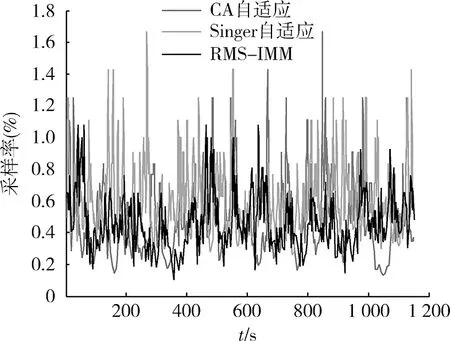
圖3 σx=100 m,σy=100 m時采樣率比較Fig.3 Comparison of sampling rate when σx=100 m and σy=100 m
3.2 仿真場景2
當觀測噪聲誤差標準差分別為σx=σy=400 m時,RMS-IMM算法與傳統算法采樣率比較如圖4所示。
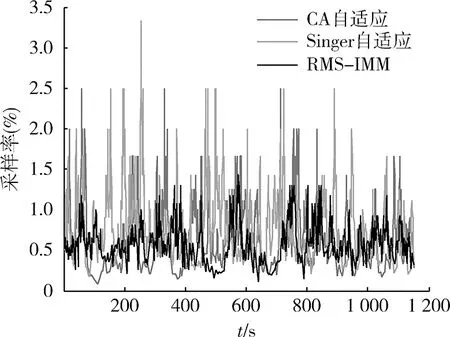
圖4 σx=400 m,σy=400 m時采樣率比較Fig.4 Comparison of sampling rate when σx=400 m and σy=400 m
系統噪聲增大時,3種自適應采樣算法總體采樣率整體水平都隨之提升, 基本實現了隨目標機動的自適應采樣率調整。CA,Singer自適應算法采樣率起伏較大,突變點顯著增多,魯棒性較差,RMS-IMM算法自適應采樣準則能更精確的反映目標機動變化,基于平滑因子控制,采樣率曲線較為平滑,穩定性更高。本文仿真只添加較為簡單的高斯白噪聲,但在實際雷達探測臨近空間高超聲速目標時噪聲環境更加復雜,RMS-IMM算法穩定性體現將更加顯著。
3.3 算法總體性能評價
針對每一次Monte Carlo采樣點數與采樣時間不確定的問題,修改傳統統計評價指標作為衡量算法的整體性能參數。
總體均方差(單位m)為
(17)
相對誤差壓縮比為
(18)
平均采樣點數為
(19)
式中:M,Nt分別為Monte Carlo次數、第t次仿真采樣點數;X(k|k),X(k),Z(k)分別為濾波值、真實值、量測值。
表1反映了3種算法的總體性能。可以看出當系統觀測噪聲標準差為100 m時,Singer,RMS-IMM算法x軸總體均方差在92 m左右波動,由于x軸有較長時間弱機動導致CA自適應x軸跟蹤精度相對較低,但整體相差最大不超過10;y軸總體均方差值集中于90 m附近,相對誤差壓縮較為接近。當系統噪聲增大時,自適應算法的位置總體均方誤差和采樣點數都隨之增加。3種自適應變采樣算法總體均方誤差相當,相對誤差壓縮比之間相差較小。基于以上分析3種算法跟蹤精度相近,RMS-IMM算法的觀測點數最少。

表1 3種算法體性能比較Table 1 Comparison of performances of three algorithms
仿真結果說明了本文提出的RMS-IMM自適應變采樣算法跟蹤NSHT的可行性和有效性,相同的噪聲環境下,圖2表明該算法與傳統自適應變采樣算法位置整體誤差均方根值較為接近。針對傳統CA,Singer自適應采樣準則適應性問題,RMS-IMM算法基于前后相鄰時刻濾波位置殘差設計主導因子,通過協方差偏差修正指數參數保持較為穩定的跟蹤精度,避免采樣間隔誤差累積導致后續跟蹤精度降低。考慮到CA,Singer自適應算法采樣率出現多個突變點的問題,引入平滑因子,提高采樣率穩定性。圖3,4表明RMS-IMM算法較CA,Singer自適應變采樣算法能更準確的表征目標機動,在系統噪聲增大時CA,Singer自適應算法采樣率突變點增多且峰值變大,經過平滑處理的RMS-IMM算法對采樣率沖擊點抑制效果顯著,突變點較少,采樣率更加穩定。當機動較弱時,在不嚴重犧牲跟蹤精度的情況下RMS-IMM算法能快速適應目標當前運動,及時增大采樣間隔,減少觀測次數提高實時性;當機動較強時,RMS-IMM根據機動強度合理減小采樣間隔(當精度到達某一程度時,減小采樣間隔對精度提高效果并不理想),能更好的平衡跟蹤精度與采樣點數的關系,其費效比更高。結合表1,RMS-IMM算法在采樣點數較CA,Singer更少,具有更低的資源占用率。
4 結束語
本文提出的相對機動RMS-IMM自適應變采樣算法有效克服了傳統CA,Singer自適應變采樣算法采樣率針對單一模型、穩定性差的缺陷。跟蹤精度相近的條件下,RMS-IMM算法采樣率穩定性、機動適應性、采樣點數都優于傳統自適應變采樣算法,是一種較為可行的NSHT跟蹤算法,對NSHT跟蹤策略與跟蹤參數研究有一定的參考價值。如何進一步提高算法在目標機動時的適應性,是下一步將要進行的工作。
[1] 聶萬勝,羅世彬,豐松江,等.近空間飛行器關鍵技術及其發展趨勢分析[J].國防科技大學學報,2012,34(2):107-113. NIE Wan-sheng, LUO Shi-bin, FENG Song-jiang, et al. Analysis of Key Technologies and Development Trend of Near Space Vehicle[J].Journal of National University of Defense Technology, 2012,34(2):107-113.
[2] 秦雷,李君龍,周荻. 基于交互式多模型算法跟蹤臨近空間目標[J]. 系統工程與電子技術,2014,36(7):1243-1249. QIN Lei, LI Jun-long, ZHOU Di. Tracking for Near Space Target Based on IMM Algorithm[J]. Systems Eengineering and Electronics, 2014,36(7):1243-1249.
[3] GUAN Xin,ZHAO Jing. Resarch on Tracking Technology the Hypersonic Aircraft Based on IMM[C]∥ the 2011 International Conference on Wavelet Analysis and Pattern Recognition,2011:50-54.
[4] LAN Jian, LI Xiao-rong, MU C D. Best Model Augmentation for Variable-Structrue Multiplemodel Estimation[J].IEEE Trans. on Aerospase and Electronic Systems,2011,47(3):2008-2025.
[5] COHEN S A. Adaptive Variable Update Rate Algorithm for Tracking Targets with a Phased Array Radar[J].IEE Proc,of Radar Signal Process, 1986, 133(3): 277-230.
[6] VAN KEUK G, BLACKMAN S S. On Phased-Array Radar Tracking and Parameter Control[J]. IEEE Trans. on Aerosp Electron Syst, 1993,29(1):186-194.
[7] COETZEE S L, WOODBRIDGE K, BAKER C L. Multifunction Radar Resource Management Using Tracking Optimization [C]∥The IEEE the International Radar Conference, 2003:578-583.
[8] 鑒福升,徐躍民,陰澤杰.基于IMM的電掃描雷達參數控制算法研究[J]. 中國科學技術大學學報,2010,40(3):294-298. JIAN Fu-sheng, XU Yue-min, YIN Ze-jie. Research of Parameter Control Algorithm for Electronically Scanned Radar Based on IMM[J]. Journal of University of Science and Technology of China, 2010,40(3):294-298.
[9] 盧建斌,胡衛東,郁文賢. 基于協方差控制的相控陣雷達資源管理算法[J]. 電子學報,2007(3):402-408. LU Jian-bin, HU Wei-dong, YU Wen-xian. Resource Management Algorithm Based on Covariance Control for hased Array Radars[J]. Acta Electronica Sinica,2007(3):402-408.
[10] 郁衛華,朱翔,朱曉華. 基于交互式多模型粒子濾波的相控陣雷達自適應采樣[J]. 電子設計工程,2012,20(5):29-32. YU Wei-hua, ZHU Xiang, ZHU Xiao-hua. Adaptive Sampling Method for Phased Array Radar Based on Interacting Multiple Model Particle Filter[J]. Electronic Design Engineering,2012,20(5):29-32.
[11] ZHANG Zhen-kai, ZHOU Jian-jiang, WANG Fei, et al. Multiple-Target Tracking with Adaptive Sampling Intervals for Phased-Array Radar[J]. Journal of Systems Engineering and Electronics ,2011,22(5):760-766.
[12] CHENG Ting, HE Ze-shu, TANG Ting. Dwell Scheduling Algorithm for Multifunction Phased Array Radars Based on the Scheduling Gain[J]. Journal of Systems Engineering and Electronics, 2008,19(3):479-485.
[13] émilie Winter, Philippe Baptiste. On Scheduling a Multifunction Radar[J]. Aerospace Science and Technology, 2007(11):289-294.
[14] QU Hong-quan, PANG Li-ping, LI Shao-hong. A Novel Interacting Multiple Model Algorithm [J]. IEEE trans. on Signal Processing,2009(89):2171-2177.
[15] CHENG Ting, HE Ze-shu, TANG Ting. An IMM-Based Adaptive-Rate-Target Tracking Alogrithm for Phased-Array Radar[J]. International Symposium on Intelligent Signal Processing and Communication Systems,2007(28):854-857.
[16] LIU Wei-feng, CHAI Zhong, WEN Cheng-Lin. Multi-measurement Target Tracking by Using Random Sampling Approach[J]. Acta Automatica Sinica, 2013,39(2):164-174.
[17] CHENG Ting, HE Ze, TANG Ting. Adaptive Update Interval Tracking Based on Adaptive Grid Interacting Multiple Model[J]. IET Radar Sonar Navig,2008, 2(2):104-110.
[18] 張武,趙宗貴,趙豐,等. 常加速目標純方位跟蹤最優觀測者軌跡及仿真分析[J].解放軍理工大學學報:自然科學版,2009,10(SL):11-15. ZHANG Wu, ZHAO Zong-gui, ZHAO Feng, et al. Optimal Observer Trajectory and Simulation Analysis for Bearings-only Tracking of Constant Acceleration Target [J]. Journal of PLA University of Science and Technology:Natural Science ed,2009,10(sl):11-15.
[19] LI Wen-lin, JIA Ying-min. Location of Mobile Station With Maneuvers Using an IMM Based Cubature Kalman Filter[J]. IEEE Trans. on Industrial Electronics, 2012, 59(11):4388-4348.
[20] ZHANG Min, JIA Hai-tao,SHEN Zhen. Improved Resampling Procedure Based on Genetic Algorithm in Particle Filter[J]. Journal of University of Electronic Science and Technology of China, 2015,44(3):344-349.
Adaptive Sampling Tracking Algorithm for Near Space Hypersonic Target
LI Fan1, BI Hong-kui2, DUAN Min2,YU Chen-long1
(1. Air Force Early Warning Academy,Department of Graduate Management,Hubei Wuhan 430019,China;2. Air Force Early Warning Academy,Hubei Wuhan 430019, China)
An interacting multiple model(IMM) based on relative maneuvering strength (RMS) is presented to solve the problem that traditional tracking algorithm can only applies to single model.According to the algorithm, motorized sensitive dominant gene is built to improve the sensitivity of tracking maneuver targets by comparing difference between the desired covariance matrix and that of the actual covariance and the threshold. In order to ensure the stability of adaptive sampling rate, a smoothing gene is introduced to design a linear equation. The simulation experiments show that, the three algorithms have similar tracking precision but the new algorithm lessens sampling points and mutational points, which proves that the new algorithm has better stability in the track data rate and sampling rate.
near space;hypersonic target; adaptive sampling; relative maneuvering strength(RMS); interacting multiple model (IMM); tracking data rate
2016-01-04;
2016-03-11
李凡(1992-),男,土家族,湖南鳳凰人。碩士生,主要從事臨近空間高超聲速目標跟蹤算法方面研究。
10.3969/j.issn.1009-086x.2016.06.018
V423.9;TN957.51;TP301.6
A
1009-086X(2016)-06-0102-07
通信地址:430019 湖北省武漢市黃浦大街288號
E-mail:1746338543@qq.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19