大功率高動態電動舵機的一種電流抑制方法
2016-03-16 05:37:11黃佳怡蔡權林
導航定位與授時 2016年3期
黃佳怡,蔡權林
(上海航天控制技術研究所,上海 200233)
大功率高動態電動舵機的一種電流抑制方法
黃佳怡,蔡權林
(上海航天控制技術研究所,上海 200233)
為了在保證動態性的前提下有效抑制大功率電動舵機的電流,研究了大功率電動舵機的原理及其存在的大電流現象,分析了傳統電流環在抑制電流時存在的缺陷,提出了一種基于分段控制思想的電流環設計方法,根據舵系統動態響應過程中的電流特性對電流環進行實時調參。仿真和試驗結果表明,該方法既能有效地抑制電流,提高大功率電動舵機可靠性,又能保證其動態性。
大功率;高動態;電動舵機;電流
0 引言
由于大功率高動態電動舵機中驅動電機電阻通常較小,舵機易輸出大電流;另一方面,導彈飛行工況異常復雜,舵系統可能出現高頻抖動等現象,使得舵機大電流輸出現象更為顯著。
舵機的大電流輸出容易引起其控制器中功率管頻繁擊穿,導致控制器無法正常工作;可能引起電機過度發熱,導致電機負載能力下降甚至繞組損壞;此外,大電流輸出還對舵系統電流裕度、地線布局、抗干擾能力等方面提出較高要求。因此,抑制電動舵機可能產生的大電流是大功率高動態電動舵機研制的關鍵。
本文對大功率高動態電動舵機舵系統回路進行分析,提出了一種大電流抑制方法,并對該方法的有效性進行了討論。
1 大功率電動舵機的原理與建模
1.1 大功率電動舵機原理
大功率電動舵機一般由控制器、功率驅動電路、伺服電機、傳動機構、位置檢測反饋裝置等五大部分組成[1],其原理框圖如圖1所示。控制器根據位置檢測反饋裝置測得的舵機偏轉的角度,結合導彈制導控制系統的位置給定,進行控制算法解算,控制功率驅動電路,以驅動伺服電機帶動傳動機構運動。
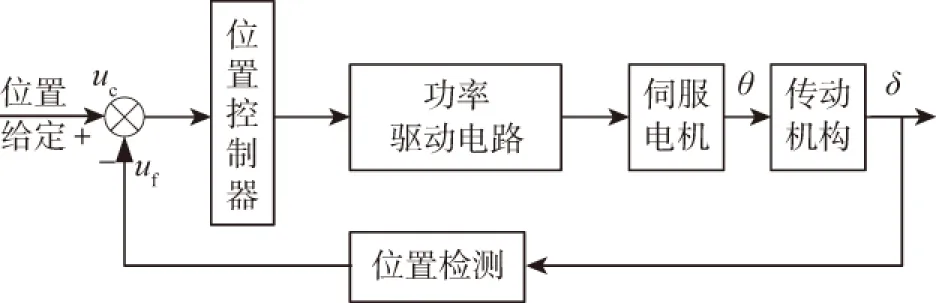
圖1 大功率電動舵系統原理框圖Fig.1 Principle diagram of high-power electromechanical actuator
1.2 大功率電動舵機建模
(1)位置控制器模型
位置控制器的種類主要有PID控制[2]、變結構控制[3]和魯棒控制[4]等。由于變結構控制時,理想開關特性無法實現,且慣性的存在使系統切換存在滯后特性,容易產生抖振等現象;魯棒控制系統的設計要由高級專家完成,一旦設計成功,就不需要太多的人工干預,但其如果要升級或作重大調整,系統就要重新設計[5];而PID控制器,具有模型簡單、精度高、易控制等優點,對其參數進行適應是調參,既可保證動態性又可提高魯棒性,且實現簡單,在工程上也得到廣泛應用,在此采用PID作為控制模型,其模型如圖2所示。
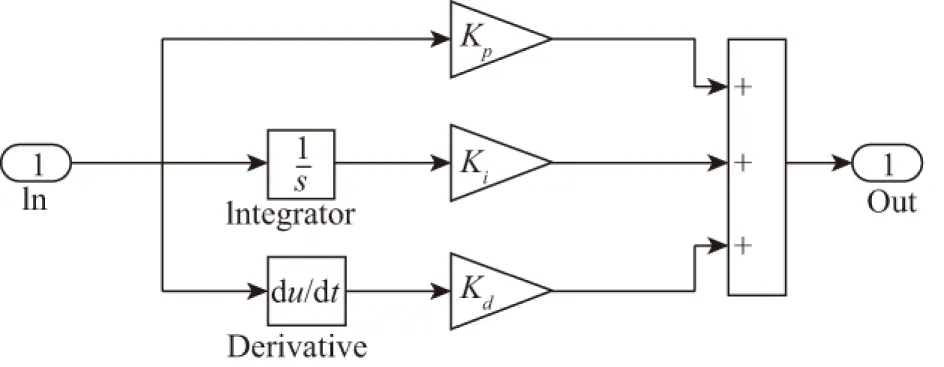
圖2 位置控制器模型圖Fig.2 Model of position controller
圖2中,Kp為比例增益,Ki為積分增益,Kd為微分增益。
(2)功率驅動電路模型
在線性區內,功率驅動器的傳遞函數為常數,記為kp。
(3)伺服電機模型
電壓平衡方程為
(1)
轉矩平衡方程為
(2)
電磁功率平衡方程為
Te=KTia(t)
(3)
其中,Ua為直流母線電壓;Ra為繞組線電阻;ia為電樞電流;La為繞組等效線電感;ke為反電勢系數;θm為電機機械角度;Te為電磁轉矩;TL為負載轉矩;J為轉子轉動慣量;KT為力矩系數。
將式(1)~式(3)拉氏變換后,可得:
Ua(s)=Ia(s)(Ra+Las)+kesθm(s)
(4)
Te-TL=Js2θm(s)
(5)
Te=KTIa(s)
(6)
由式(4)~式(6)可得伺服電機系統框圖如圖3所示。
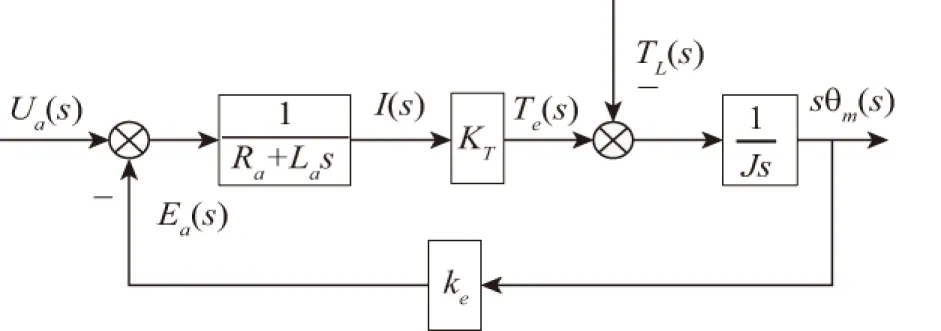
圖3 伺服電機系統框圖Fig.3 System block diagram of servo motor
(4)傳動機構模型
在傳統的電動舵機設計過程中,一般將傳動機構視為理想剛體,其傳遞函數等效為增益(即減速比倒數),即傳動機構模型用k表示。
(5)位置檢測反饋裝置模型
反饋裝置常用反饋電位器實現,為了提高反饋精度,通常在反饋電位器與舵軸之間設置增速齒輪,通過提高增速齒輪的加工精度、選擇線性度好的反饋電位器可以實現角度到電壓信號的近似線性的對應關系,因此,反饋裝置的傳遞函數可簡化成常數kw。
將位置控制器模型、功率驅動電路模型、伺服電機模型、傳動機構模型及位置檢測反饋裝置模型綜合起來,得出的電動舵機模型如圖4所示。
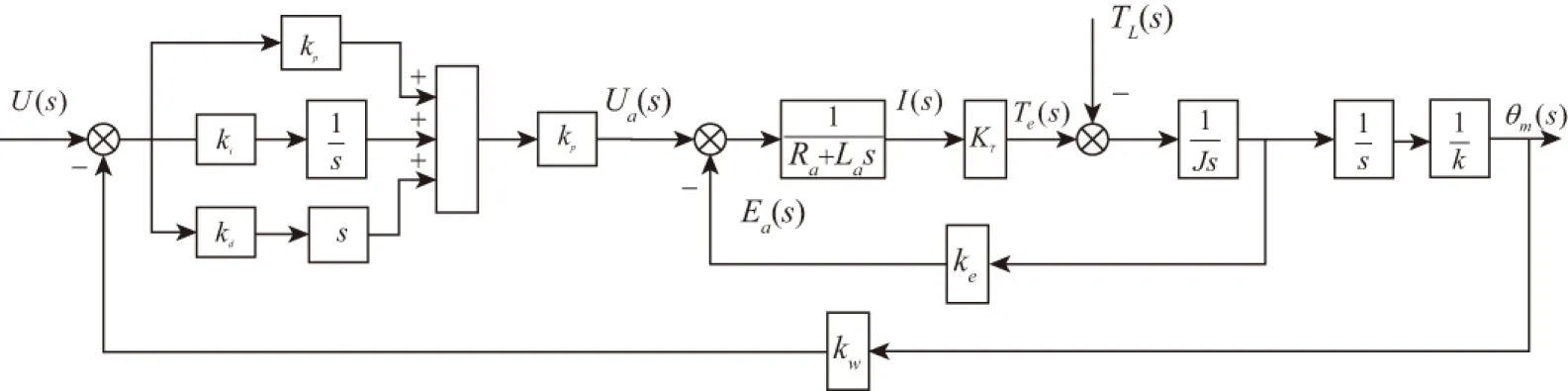
圖4 電動舵機模型Fig.4 Model of electromechanical actuator
2 大功率電動舵機存在的大電流輸出現象及分析
選用的電機參數如下:
Ra=0.8Ω;
La=1.4×10-4H;
ke=KT=0.037(N·m)/A;
J=10-5kg·m2;
U=90V。
仿真得到在1V階躍信號、150Hz/1Vpp正弦信號下的舵反饋和舵機電流曲線分別如圖5和圖6所示。

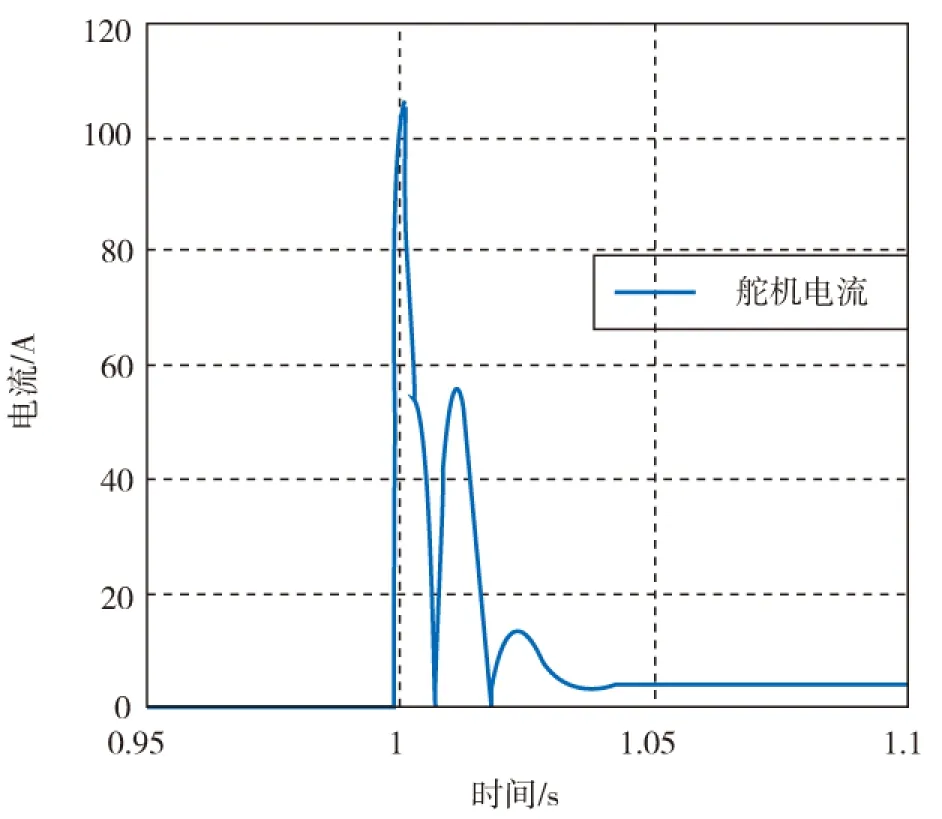
圖5 舵反饋及舵機電流曲線(1V階躍響應)Fig.5 Feedback and cureent curve of electromechanical actuator(1V step response )
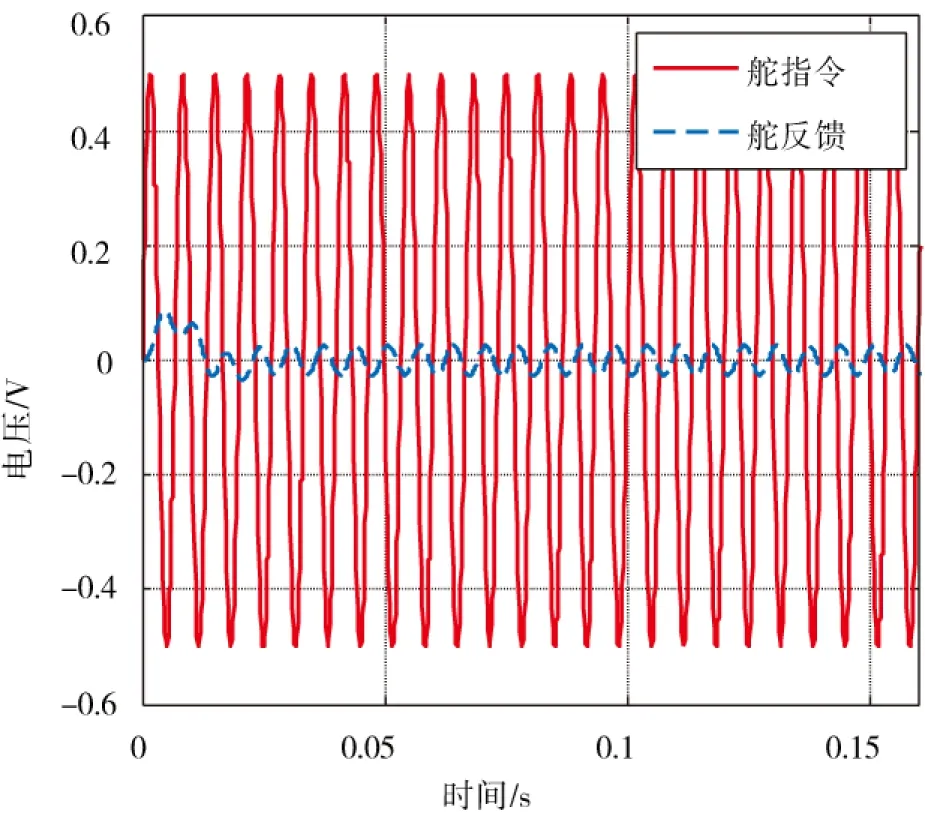
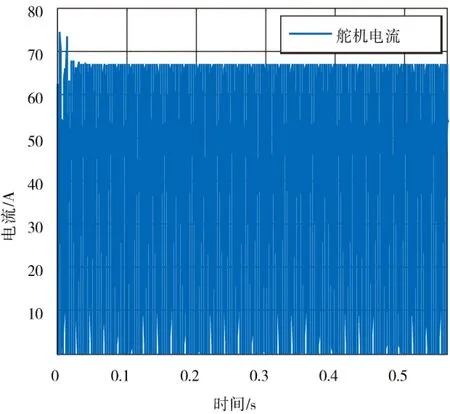
圖6 舵反饋及舵機電流曲線(150Hz/1Vpp正弦)Fig.6 Feedback and cureent curve of electromechanical actuator(150Hz/1Vpp sin response )
由圖5、圖6可見,在1V階躍指令信號下,舵機瞬態峰值電流高達100A以上;在150Hz/1Vpp高頻正弦指令信號下,舵機輸出穩態大電流高達近70A。
該舵機在150Hz/1Vpp正弦信號下的輸出電流實測曲線如圖7所示。
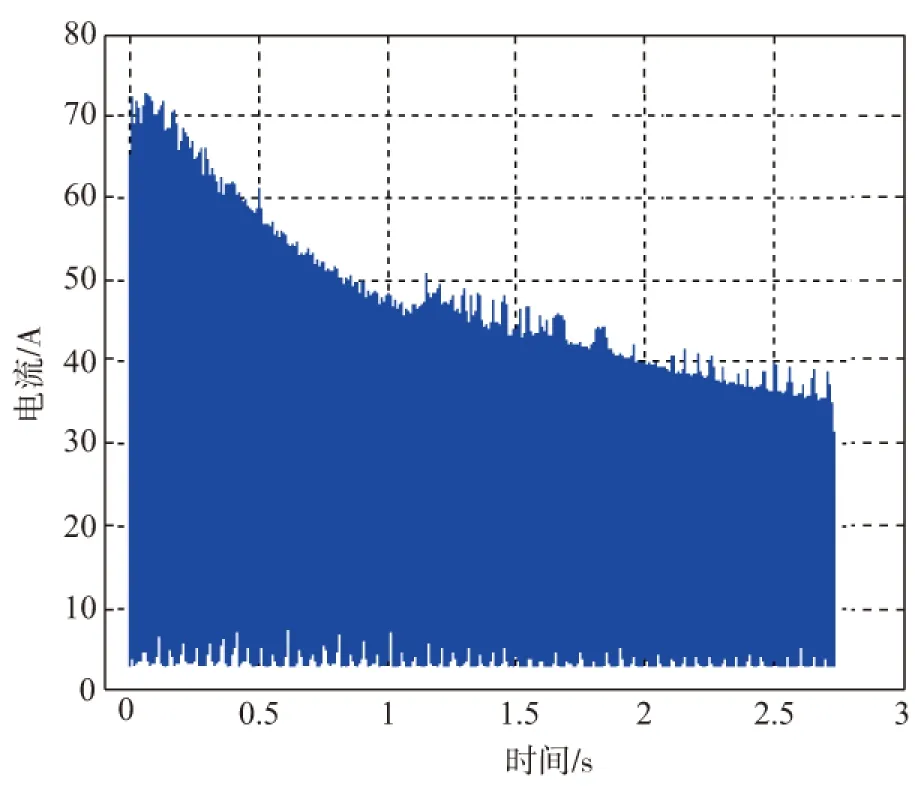
圖7 舵機輸出電流實測曲線(150Hz/1Vpp)Fig.7 Measured output current of electromechanical actuator
圖7中,舵機輸出電流呈下降趨勢,這主要是由于高頻信號下,舵機中驅動電機發熱導致其內阻逐漸增大的緣故。由圖7可見,舵機輸出最大電流高達70A以上。
大功率電動舵機產生大電流的原因是為保證高動態,舵系統控制作用一般較強,而電機電樞電阻一般較小,從而使得電流較大,特別是高頻信號下,由于舵指令與舵反饋偏差不斷變化,導致電機頻繁換向,供電電壓與反電動勢疊加后共同作用在電機內阻上產生大電流。由式(4)~式(6)可得
由于高動態舵機中J和La一般較小,LaJ≈0,忽略二次方,可得
(7)
由式(7)可知,由于大功率高動態電動舵機Ra較小,而為保證高動態,控制作用一般較強,即Ua較大,使得Ia較大。
為了保證舵機的安全,在保證動態性的前提下,需要盡量降低Ia。而由于單位置環控制的大功率高動態舵系統,對動態過程中的電流不進行檢測和控制,無法有效降低舵機的輸出電流,使得舵機在高頻或階躍信號下存在輸出大電流現象。
因此,為解決大功率大電流帶來的可靠性問題,傳統的方法是通過限流或引入電流環等措施解決。
由于限流很難在動態性能和降低電流值之間達到平衡:限流值太大,無法有效降低電流;限流值太小,影響舵機動態性能。因此,在實際應用中,通過單純引入限流來降低電流輸出的方法較少使用。
而通過在位置環中加入電流環(如圖8所示),雖然能夠對電流進行有效控制,但傳統的電流環控制一般采用純P控制或PI控制,參數固定不變,在控制電流的同時,也影響了舵系統的動態特性。
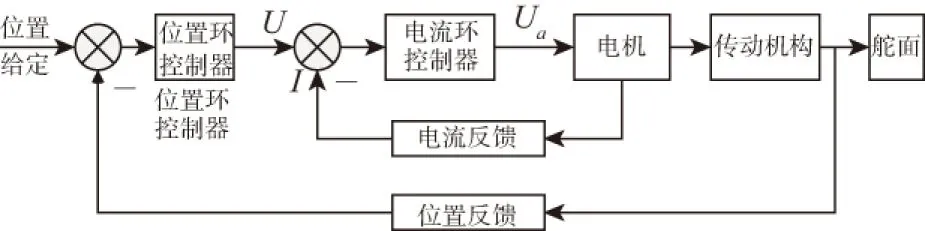
圖8 加入電流環后舵系統框圖Fig.8 System block diagram of electromechanical actuator after joining traditional current loop
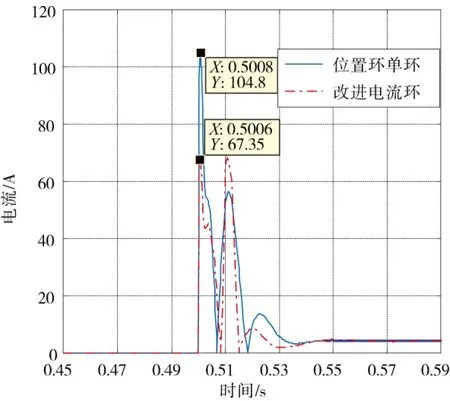
引入傳統電流環后,舵系統與位置環單環控制回路舵系統性能對比如圖9所示。
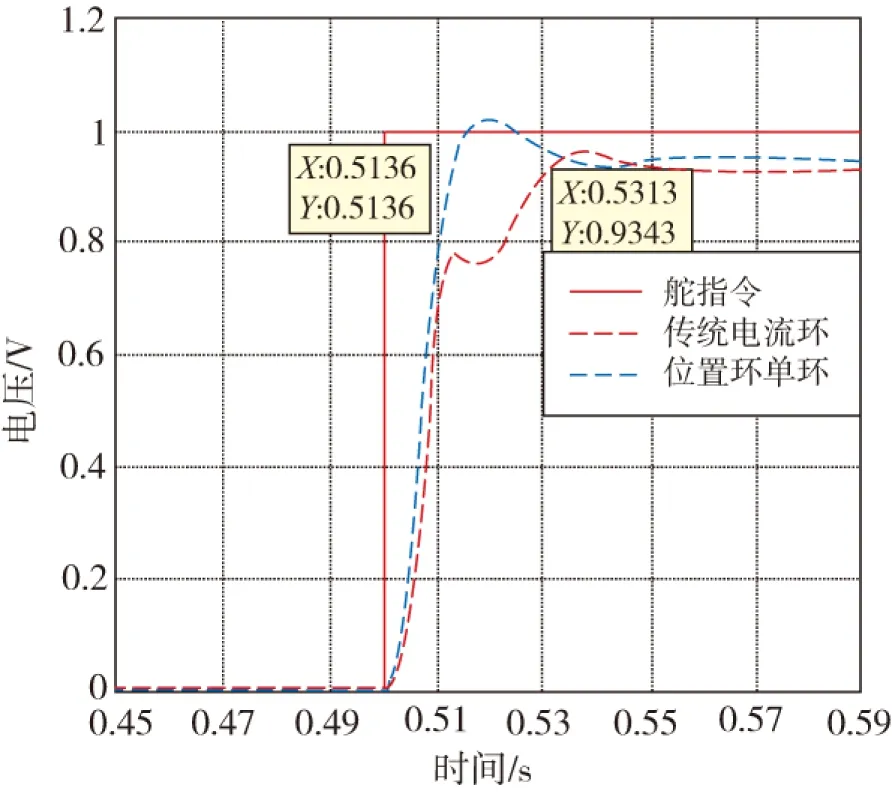
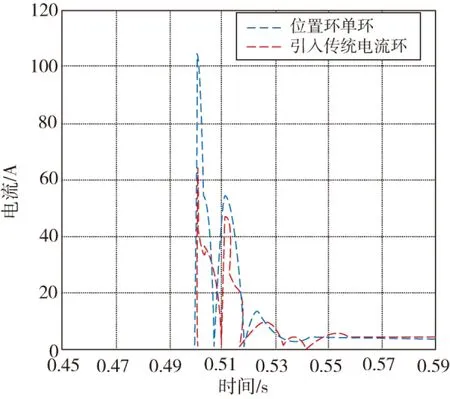
圖9 位置環單環及引入傳統電流環后舵反饋及舵機電流對比Fig.9 Comparison charts between single position loop and traditional position-current loop of electromechanical actuator
由圖9可見,引入傳統電流環后的舵系統最大峰值電流從105.4A降至63.55A,峰值電流降低了40%左右;引入傳統電流環后的舵系統調節時間約為0.0313s,較位置環單環控制舵系統調節時間(約0.0136s)提高了2.3倍,動態性能大幅下降。
因此,通過限流及引入傳統電流環的方法均無法實現既有效抑制電流又保證舵系統動態性。
3 基于分段控制的電流環設計
傳統電流環在舵系統控制回路全程起作用,且其參數基本保持不變,雖然能有效抑制電流但同時也降低了舵系統動態特性。為了保證大功率電動舵機的動態性和可靠性,對傳統電流環控制算法進行了改進,引入分段控制思想,根據舵系統動態響應過程中的電流特性對電流進行分段控制和實時調參,抑制大電流的同時,保證了舵系統高動態。
分段控制的電流環算法控制輸出方程如下:
(8)
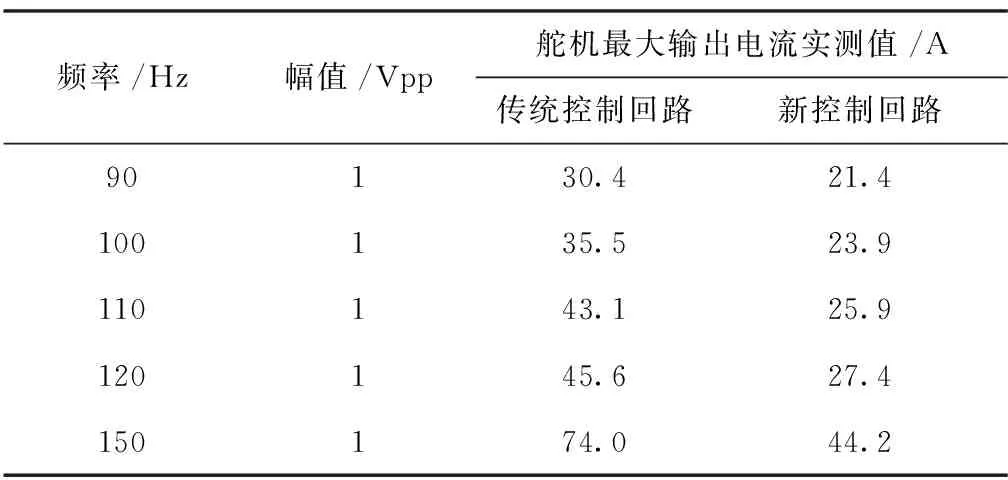
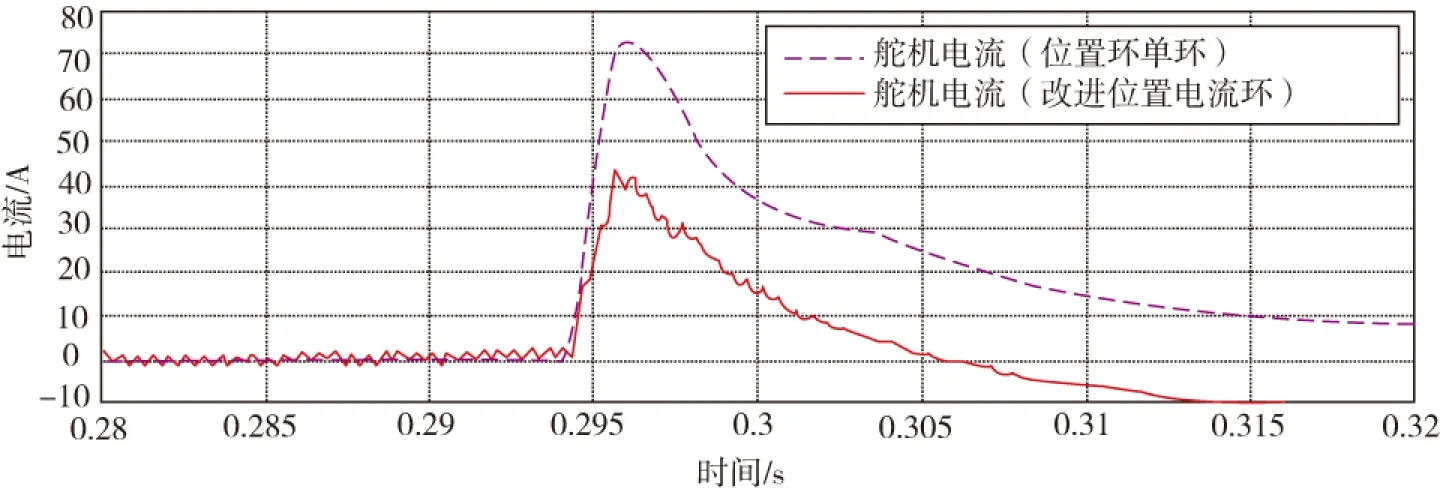
I (9) 對引入分段控制電流環后的舵系統進行仿真,仿真結果如圖10所示。 圖10 兩種舵反饋及舵機電流對比曲線(階躍響應)Fig.10 Step response comparison charts of two kinds of electromechanical actuator 由圖10可見,引入分段控制思想對電流環進行改進后,舵系統最大峰值電流從105.4A降至67.35A,峰值電流降低了40%左右;同時,舵系統動態性能基本保持不變,舵系統調節時間約為0.0140s,與單位置環控制時舵系統調節時間(約0.0136s)基本相當,仍保持舵系統的高動態性能。 為了驗證該方法的有效性,本文基于某型號電動舵機進行了實物驗證。由于瞬態峰值電流和穩態大電流對其舵系統可靠性影響最大,瞬態峰值電流考核電路設計余量,穩態大電流則考核舵系統抗干擾和抗發熱能力。為此分別對創新前后舵系統在高頻指令(考核穩態大電流)和階躍指令(考核瞬態峰值電流)時的電流進行對比。 表1為傳統位置環單環舵系統控制回路、新舵系統控制回路(改進位置電流環)在不同頻率正弦信號下舵機最大輸出電流實測值對比表,圖11為傳統舵系統控制回路、新舵系統控制回路階躍指令下舵機電流實測對比圖。 表1 不同頻率正弦信號下兩種回路舵機最大輸出電流對比表 圖11 傳統舵系統控制回路、新舵系統控制回路階躍指令下舵機電流對比圖Fig.11 Current contrast figures between traditional and innovated control of electromechanical actuator 由表1可知,采用新舵系統控制回路后,高頻信號下舵機最大輸出電流相對采用傳統控制回路的舵機下降了28%~40%;由圖11可知,采用新舵系統控制回路后,單位階躍指令信號下舵機峰值電流由74.0A下降至44.2A,電流峰值電流降低40%以上。 由此可見,舵系統采用新控制回路后,最大輸出電流得到有效降低,提高舵機可靠性,而舵系統動態性能則幾乎不受影響。表2為傳統舵系統控制回路、新舵系統控制回路下舵系統性能實測對比表。 表2 傳統舵系統控制回路、新舵系統控制回路下舵系統性能對比表 由表2可知,采用新控制回路后舵系統性能與傳統舵系統控制回路基本相當,仍具有較高動態性能。 由于大功率高動態電動舵機驅動用電機內阻較小,在階躍或高頻信號下不可避免存在大電流輸出現象。當導彈飛行工況較為惡劣時,大電流輸出可能引起舵系統失效。 為此分析抑制電流的兩種傳統方法,找出解決措施,通過引入分段控制思想,對傳統電流環進行改進設計,根據舵系統動態響應過程中的電流特性對電流進行分段控制和實時調參,抑制大電流的同時,保證了舵系統高動態性能。 [1] 秦文甫.基于DSP的數字化舵機系統設計與實現[D].北京:清華大學,2004:11-13. [2] 李友善.自動控制原理[M].北京:國防工業出版社, 1989: 77-186. [3] 梁慧冰,周青青.模糊控制的應用現狀及未來發展趨勢[J].廣州自動化學報, 1994, 15(3): 1-3. [4] 駱光照.電動舵機的魯棒控制研究[D].西安:西北工業大學,2003:44. [5] 姚俊,曾凡菊.電動舵機控制系統的電流環設計[J].沈陽理工大學學報,2010, 29(1): 11-14. A Method to Suppress the Current for High-Power Electromechanical Actuator HUANG Jia-yi, CAI Quan-lin (Shanghai Institute of Spaceflight Control Technology,Shanghai 200233,China) In order to ensurethe current of high-power electromechanical actuatorcould be suppressed effectively and keep its fine-dynamic performance, the operation principle of high-power electromechanical actuator and its high current was studied.After analyzing the limitation of tradition current loop for suppressing the current, a segment control method of current loop was designed by online controlling the current loop parameters based on the characteristic of the electromechanical actuator dynamic response process current.Both experiment and simulation results shows that the method can suppress the current effectively and also can improve the reliability and keep the fine-dynamic performance. High-power;Fine-dynamic performance;Electromechanical actuator;Current 10.19306/j.cnki.2095-8110.2016.03.004 2014-10-11; 2015-04-10。 黃佳怡(1985-),女,碩士,工程師,主要從事伺服系統控制的研究。 TJ760.35 A 2095-8110(2016)03-0018-07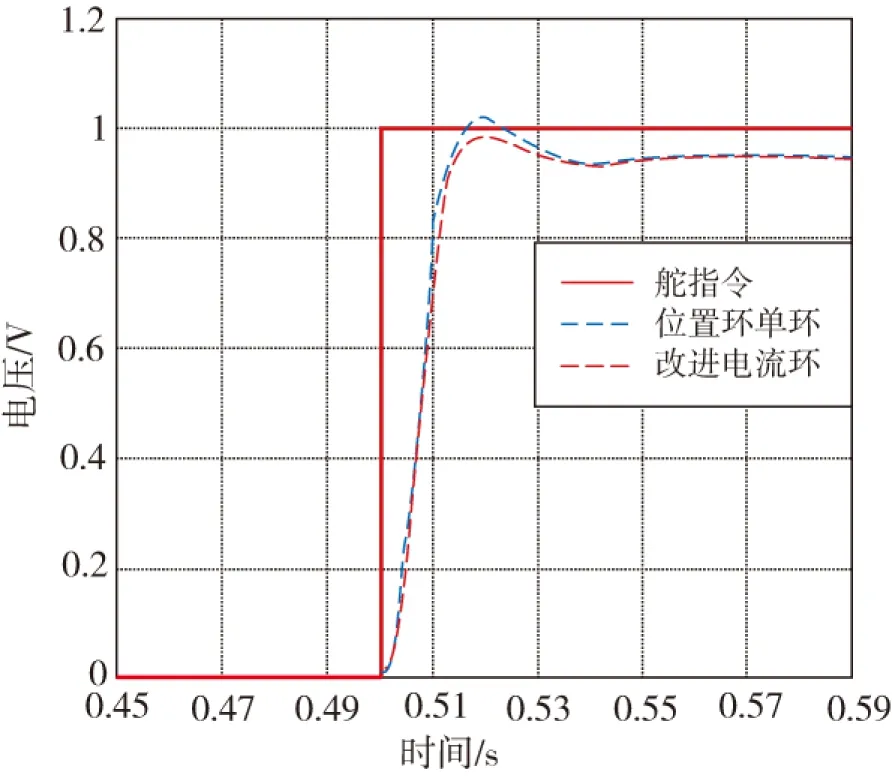
4 試驗結果

5 結語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
