兼容型高靈敏捕獲算法的硬件實現(xiàn)方案
2016-04-07 08:41:29劉益芬
導(dǎo)航定位學(xué)報 2016年1期
劉益芬,金 天
(北京航空航天大學(xué) 電子信息工程學(xué)院,北京 100191)
?
兼容型高靈敏捕獲算法的硬件實現(xiàn)方案
劉益芬,金天
(北京航空航天大學(xué) 電子信息工程學(xué)院,北京100191)
摘要:針對多模接收機(jī)在弱信號環(huán)境下的可用性問題,本文提出了一種可兼容多個體制信號的硬件高靈敏度捕獲算法。本文采用基于傅里葉變換的部分匹配濾波器的捕獲算法,同時通過相干-非相干積分的方式延長積分時間。本文還實現(xiàn)了兼容型捕獲算法的要求,可以高靈敏捕獲多個類型的衛(wèi)星導(dǎo)航信號。實際應(yīng)用中,只需將捕獲的信號類型、中心頻率及捕獲方式(普通/高靈敏)通過接口輸入,便可將算法的關(guān)鍵參數(shù)預(yù)置,實現(xiàn)多種信號的捕獲。最后,本文還將該算法在FPGA硬件平臺上實現(xiàn),并測試了實際信號的捕獲靈敏度。測試結(jié)果表明,其捕獲靈敏度可達(dá)到26 dBHz。
關(guān)鍵詞:捕獲;高靈敏;兼容;GNSS;BDS
0引言
北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou navigation satellite system,BDS)是我國正在實施的自主發(fā)展、獨立運行的全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GNSS),2012年已正式開始提供亞太地區(qū)的服務(wù)[1],并將在2020年形成全球覆蓋能力。目前,BDS在各個領(lǐng)域內(nèi)都得到了廣泛的應(yīng)用,但是在一些特殊的環(huán)境中,例如室內(nèi)、密林、城市等,信號功率收到了嚴(yán)重的遮擋和衰減,接收機(jī)的可用性面臨挑戰(zhàn)。
高靈敏捕獲算法是高靈敏接收機(jī)的關(guān)鍵技術(shù)之一。但由于體制不同,不同系統(tǒng)信號的捕獲方法和參數(shù)差別很大,采用單一方法進(jìn)行捕獲非常困難。為了拓展接收機(jī)在弱信號環(huán)境下的應(yīng)用,本文提出了一種兼容型高靈敏捕獲算法。該算法通過相干-非相干積分延長積分時間以提高捕獲信號的信噪比,并且可通過接口配置不同系統(tǒng)、不同頻點、不同體制的導(dǎo)航衛(wèi)星的信號的捕獲算法。相對于傳統(tǒng)的只能捕獲一種信號的算法而言增加了天空中可見星的數(shù)量,特別適用于多模接收機(jī)在弱信號環(huán)境下的使用。
1捕獲算法原理
1.1PMF-FFT捕獲算法
目前,全球?qū)Ш叫l(wèi)星系統(tǒng)大多采用碼分多址(code division multiple access,CDMA)的信號復(fù)用方式[2],接收機(jī)對導(dǎo)航信號的捕獲主要包括載波頻率捕獲和偽碼相位捕獲[3]兩方面內(nèi)容。本文主要采用基于快速傅里葉變換的部分匹配濾波器(partial matched filter based on fast Fourier transform,PMF-FFT)[4]捕獲算法,該算法捕獲原理如圖1所示。

圖1 PMF-FFT捕獲原理圖
如圖1所示,射頻信號經(jīng)下變頻后即得到中頻數(shù)字信號RIF, 分別與同相、正交兩路載波混頻后即得到復(fù)數(shù)形式的中頻信號,再與本地產(chǎn)生的偽碼一起依次進(jìn)入P個X級部分匹配濾波器組。P組匹配濾波器的輸出即為P個復(fù)數(shù),將這P個復(fù)數(shù)作為L點快速傅里葉變換快速傅里葉變換(fast Fourier transform,F(xiàn)FT)的輸入。進(jìn)行FFT補(bǔ)償運算,比較L個FFT輸出的最大值,與預(yù)設(shè)的門限比較判決是否同步成功。
設(shè)下變頻后得到的中頻信號[5]為
RIF(n)=Ac(n)d(n)cos[(ω0+ωd)n+φ]+N
(1)
式(1)中,A為信號幅度,c(t)為擴(kuò)頻序列,d(t)為導(dǎo)航電文數(shù)據(jù),ω0為多普勒頻率,ωd為載波頻率,N為高斯白噪聲。
本地參考信號為
I(n)=c(n)cos(ωdn)
(2)
Q(n)=c(n)sin(ωdn)
(3)
在不存在噪聲且本地偽碼與接收信號偽碼同步的條件下,文獻(xiàn)[6]給出了系統(tǒng)歸一化的幅頻響應(yīng)為
(4)
式(4)中,ωd=πfdTc,k=0,1,…,L-1,L為FFT運算點數(shù),M為部分匹配濾波器長度,Tc為碼元寬度。
(5)
將參數(shù)稍作調(diào)整即可適用于多種類型信號的捕獲,尤其滿足高動態(tài)接收機(jī)捕獲的性能要求。從運算量的角度看,該算法的FFT運算量僅為L點,節(jié)約了大量硬件資源和運算時間。
1.2高靈敏捕獲算法
顯然,采用相干積分與非相干積分[7]的方式延長積分時間可有效提高接收信號的信噪比以實現(xiàn)弱信號環(huán)境下的捕獲。但受到導(dǎo)航電文數(shù)據(jù)跳變的影響,相干積分時間長度是有限的。以全球定位系統(tǒng)全球定位系統(tǒng)(global positioning system,GPS) L1 C/A信號為例,由于導(dǎo)航電文速率為50 bps,相干積分的時間一般被限制在20 ms以內(nèi)。對于BDS B1I信號,也可以得到相同的結(jié)論。根據(jù)文獻(xiàn)[7],當(dāng)相干積分時間為Kms時,其增益可以表示為
Gc=10log(K)
(6)
非相干積分是另一種延長積分時間的方式,其中心思想為去除相位信息,僅保留幅度信息,將判決量取平方后再相加。這種積分方式可以使得積分結(jié)果不受數(shù)據(jù)跳變的影響,但是相對于相干積分而言積分增益較低。文獻(xiàn)[7]給出非相干積分的增益為
Gi=10log(m)-L(m)
(7)
式(7)中,m表示非相干積分次數(shù),L(m)表示由非相干引起的損耗,當(dāng)m很小的時候,L(m)發(fā)揮的作用不明顯,非相干積分可以有效的提高增益,但是當(dāng)m是一個較大的數(shù)值的時候,非相干的損耗接近于L(m)=5log(m), 因此G=5log(m)[7],因此,采用長時間的非相干積分不能有效得提高信號的增益。
1.3參數(shù)設(shè)置
由式(4)可知,PMF-FFT捕獲算法的捕獲頻率分辨率為
(8)
因此,捕獲的頻率范圍為
(9)
文獻(xiàn)[8]描述了GPS L1 C/A信號和BDS B1I信號的相似性,這也是兼容型捕獲算法的基礎(chǔ)。對于BDS B1I信號而言,低動態(tài)普通接收機(jī)的頻率搜索范圍一般為±5 kHz[9],碼相位搜索間隔一般要求小于0.5個碼片,頻率搜索間隔小于500 Hz。而高靈敏捕獲后一般需要采用高靈敏跟蹤算法對信號進(jìn)行跟蹤,因此高靈敏捕獲的頻率分辨率一般要求小于50 Hz[10],同時需要滿足
(10)
實際使用中取P=10,則有fmax=5 000Hz。
BDS B1I信號上調(diào)制了碼速率2.046 Mbps,碼長為2 046的信號測距碼。導(dǎo)航電文分為D1導(dǎo)航電文和D2導(dǎo)航電文,D2導(dǎo)航電文速率為500 bps,主要用于快速定位。D1導(dǎo)航電文速率為50 bps,并調(diào)制有1 bps的二次編碼,即紐曼-霍夫曼(Neumann-Hoffman,NH)碼。該NH碼周期為1個導(dǎo)航信息位的寬度,NH碼1 bit寬度則與擴(kuò)頻碼周期相同。
捕獲中積分時間的參數(shù)是可配置的。普通捕獲僅用2 ms信號。而高靈敏捕獲使用20 ms的相干積分,再輔以5次非相干積分。在具體參數(shù)配置上,普通捕獲和高靈敏捕獲均取P=10,L=512,則有fmax=5 kHz,頻率分辨率Δf=19.531 25 Hz。
GPS L1 C/A信號上調(diào)制了碼速率1.023 MHz,碼長為1 023的C/A碼,導(dǎo)航電文速率為50 bps。仍采用20 ms的相干積分時間及5次非相干積分的高靈敏捕獲算法。其余參數(shù)皆與BDS B1I信號相同。
2硬件設(shè)計與實現(xiàn)
2.1基本框架設(shè)計
為了驗證算法的實際性能,本文將核心算法在集成了現(xiàn)場可編程門陣列(field programmable gate array,F(xiàn)PGA)、數(shù)字信號處理器(digital signal processor,DSP)及通信接口的開發(fā)板上實現(xiàn),具體型號為Xilinx K7 FPGA及C6678 DSP,硬件結(jié)構(gòu)如圖2所示。
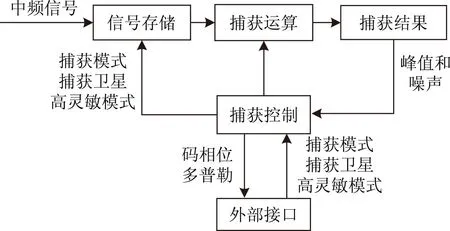
圖2 FPGA總體框架設(shè)計
接收到外部接口傳遞的參數(shù)后,捕獲控制模塊首先根據(jù)衛(wèi)星編號及信號模式控制信號存儲模塊對信號進(jìn)行存儲,同時進(jìn)行內(nèi)部參數(shù)的設(shè)置。再由內(nèi)部參數(shù)控制產(chǎn)生相應(yīng)的本地偽碼序列并進(jìn)行存儲。初始化設(shè)置結(jié)束后即進(jìn)入捕獲階段,此時由捕獲控制模塊對捕獲流程進(jìn)行控制,包括碼片滑動、相干積分時間、非相干積分次數(shù)等。捕獲完成后,同樣由捕獲控制模塊將捕獲結(jié)果及捕獲成功的握手信號發(fā)送回外部接口。這樣就完成了一次完整的捕獲運算。
2.2接口配置
捕獲模塊的核心功能即為接收到外部的捕獲指令,根據(jù)指令對相應(yīng)的信號進(jìn)行捕獲,最后將捕獲結(jié)果輸出。因此接口配置見表1。
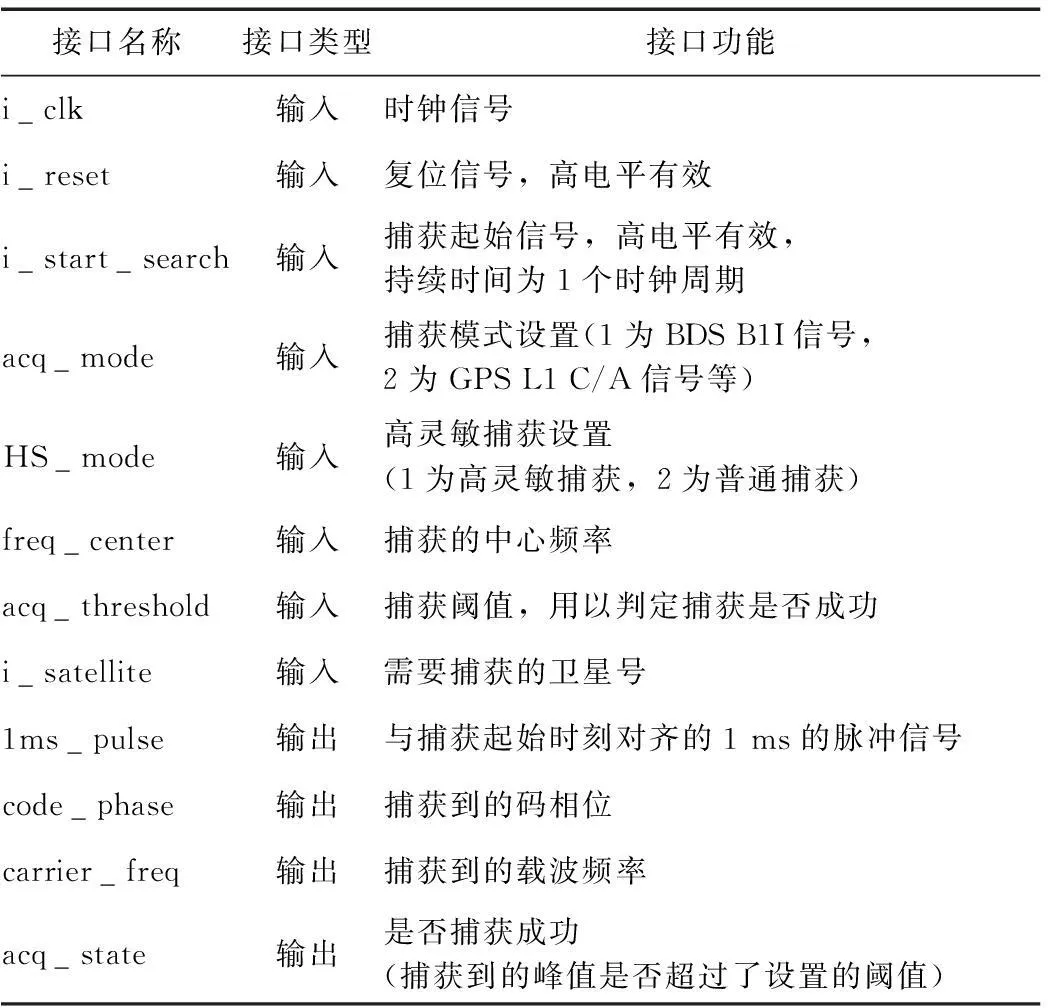
表1 捕獲模塊頂層接口配置
2.3模塊劃分
捕獲功能的實現(xiàn)需要多個模塊有機(jī)構(gòu)成并協(xié)同工作,本文在明確捕獲系統(tǒng)的輸入輸出接口后,將該系統(tǒng)劃分為幾個子模塊并獨立實現(xiàn),以利于后期系統(tǒng)的升級和維護(hù)。子模塊的劃分及功能描述見表2。
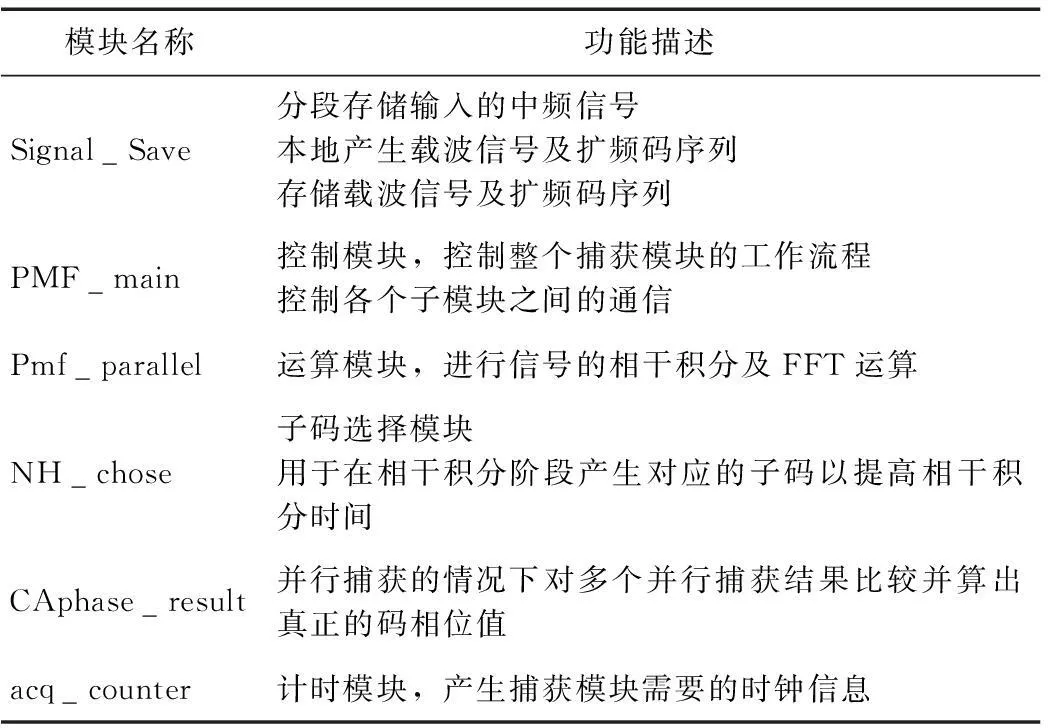
表2 捕獲子模塊劃分
表2中前三個模塊是捕獲的核心模塊,后三個模塊主要起到對前三個捕獲進(jìn)行輔助的作用,因此接下來本文將對前三個模塊的功能進(jìn)行詳細(xì)的描述。
2.3.1Signal_Save
Signal_Save模塊即為信號存儲模塊,在捕獲起始階段由PMF_main模塊控制完成捕獲系統(tǒng)的初始化工作,Signal_Save模塊的主要功能如表2所述。
2.3.2PMF_main
PMF_main模塊主要完成了狀態(tài)機(jī)的模塊控制工作,包括銜接各子模塊的功能、控制數(shù)據(jù)的運算、控制偽碼相位的相對滑動、判決捕獲結(jié)果的輸出等。狀態(tài)機(jī)包含INIT、COLLERATE、FFT、INCOHERENT、SLIDE、RESULT 6個狀態(tài),控制流程如圖3所示。
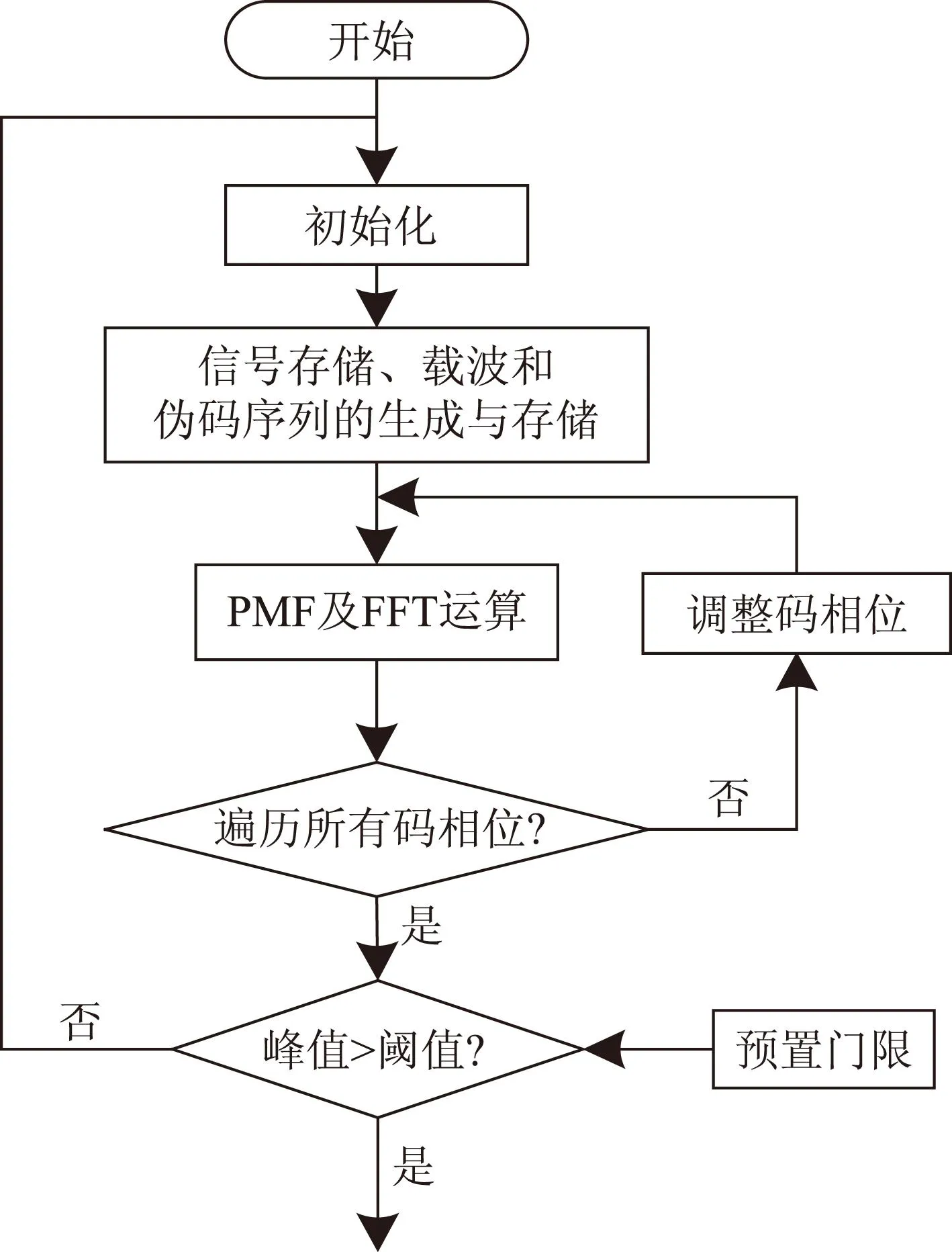
圖3 狀態(tài)機(jī)控制流程圖
當(dāng)FPGA接收到DSP傳來的捕獲開始信號后,工作流程見表3。
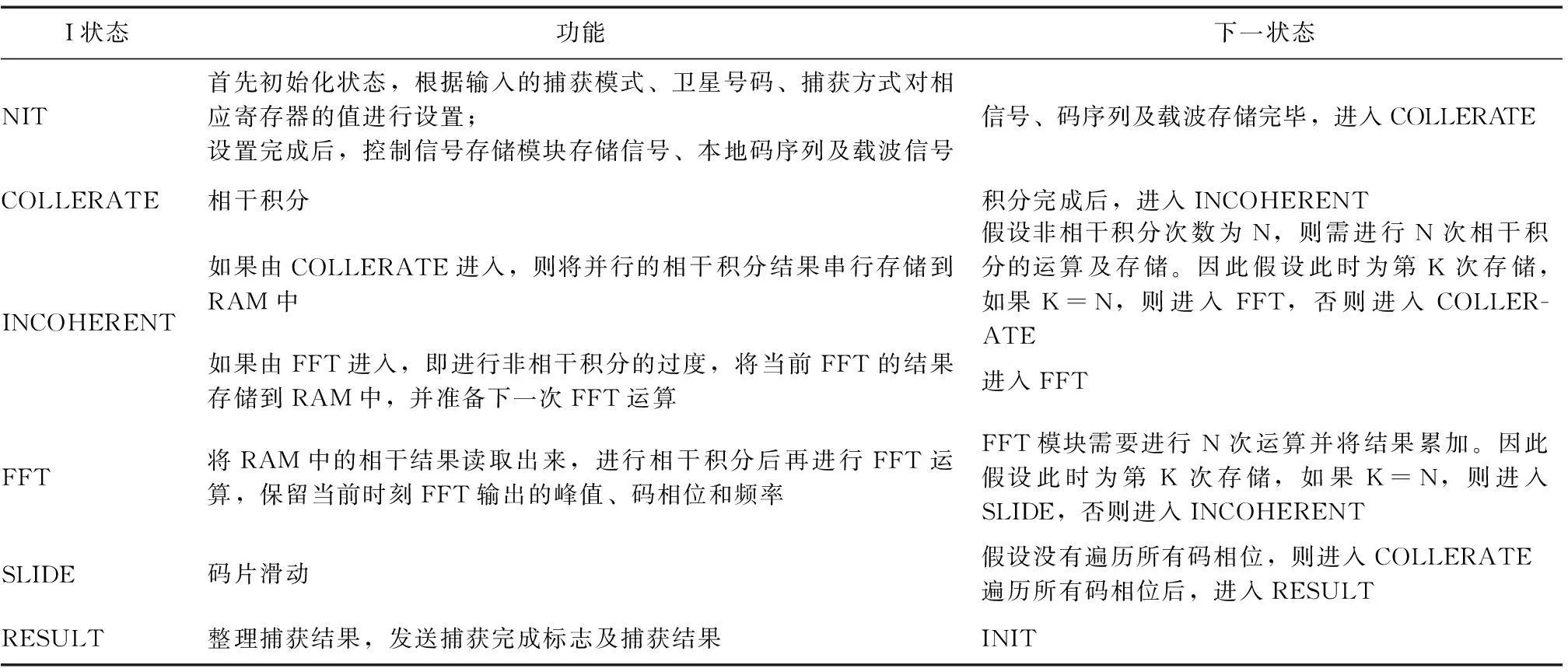
表3 狀態(tài)機(jī)工作流程
2.3.3Pmf_parallel模塊
該模塊為捕獲算法的實際運算模塊,主要由相關(guān)器及FFT的IP核兩部分組成。為了降低捕獲時間,實現(xiàn)信號的快速捕獲,本文采用了200個的并行相關(guān)器完成相干積分功能。相干積分完成后,將相干積分結(jié)果轉(zhuǎn)存至存儲器中。在高靈敏捕獲模式中,還需要將存取器中相干積分的結(jié)果進(jìn)行多周期的相干處理后再送入FFT模塊,再進(jìn)行非相干積分運算。遍歷所有碼相位后,捕獲峰值與門限值進(jìn)行比較以判定信號是否捕獲成功。
2.4相干-非相干積分
根據(jù)1.2節(jié)所述高靈敏算法的基本原理,同時考慮到長時間相干積分算法可以有效地提高捕獲信號的信噪比,而過多次數(shù)的非相干積分會引起損耗,本文采用最大限度地增加非相干積分的時間,再輔助以少量次數(shù)的非相干積分的捕獲算法。
為了突破導(dǎo)航電文比特寬度對相干積分時間的限制,兼顧硬件設(shè)計的復(fù)雜度,本文采用了一種多周期的相干處理方法[10]。為了遍歷所有的碼相位,捕獲模塊至少需要存一個碼周期的數(shù)據(jù),而多周期的相干處理方法首先需要存儲多個碼周期的數(shù)據(jù),在完成單個碼周期相干積分后,根據(jù)已知信息量或預(yù)測值將輸出值進(jìn)行加權(quán)疊加運算,完成多個碼周期的相干積分。多周期相干積分的結(jié)果經(jīng)FFT運算后取模比較,將最大的輸出值輸出作為非相干積分的輸入。硬件實現(xiàn)方案如圖4所示。
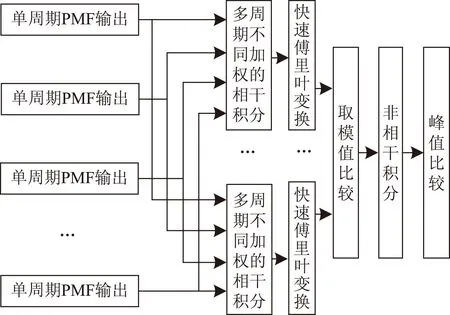
圖4 相干及非相干算法框圖
2.5兼容型功能的實現(xiàn)
相比較于傳統(tǒng)的捕獲算法而言,PMF-FFT捕獲算法的結(jié)構(gòu)不受偽碼長度及偽碼速率的影響。只需要將本地偽碼與接收信號的偽碼對齊后送入級聯(lián)的匹配濾波器即可完成捕獲的運算,因而特別適用于兼容型捕獲算法的設(shè)計。本課題中兼容型捕獲算法的關(guān)鍵在于將運算模塊和控制模塊徹底分離,如圖5所示,在捕獲的初始化設(shè)置中對相關(guān)寄存器的值進(jìn)行設(shè)置。實際捕獲流程中依靠這些寄存器的值進(jìn)行狀態(tài)轉(zhuǎn)換、握手應(yīng)答功能。
2.6硬件設(shè)計方案總結(jié)
結(jié)合第1節(jié)所述捕獲基本原理及高靈敏算法兼容型算法的實現(xiàn)方案,最終完成FPGA捕獲模塊設(shè)計框圖如圖6所示。
接收到外部接口參數(shù)后,捕獲模塊首先根據(jù)當(dāng)前的捕獲模式、衛(wèi)星編號和中心頻率對捕獲控制模塊的內(nèi)部參數(shù)進(jìn)行設(shè)置。隨后根據(jù)內(nèi)部參數(shù)產(chǎn)生相應(yīng)的本地碼序列和同相、正交兩路載波信號,并完成信號、偽碼、載波的分段存儲。初始化設(shè)置完成后,由捕獲控制模塊控制捕獲的流程,包括PMF-FFT運算、碼片滑動及相干-非相干積分運算。最后將捕獲結(jié)果輸出。
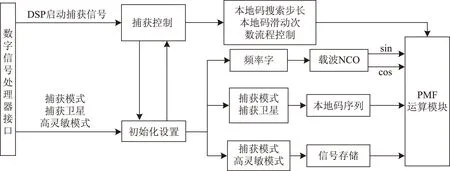
圖5 寄存器控制方式
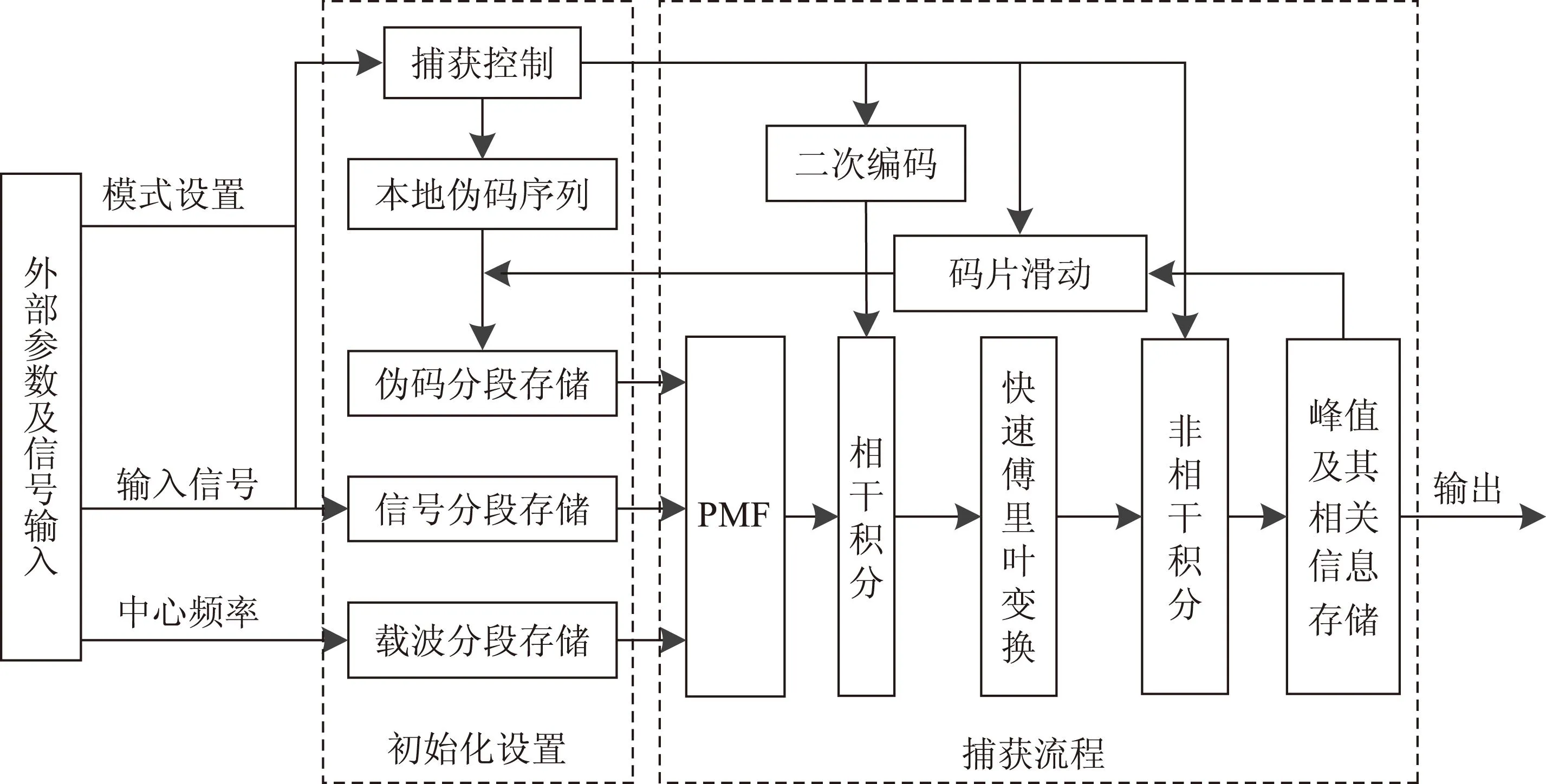
圖6 FPGA捕獲模塊實現(xiàn)框圖
3性能分析
本文測試真實的衛(wèi)星發(fā)射的信號,將其進(jìn)行衰減后利用跟蹤環(huán)測出當(dāng)前的載噪比以估測信號此時的功率大小。跟蹤環(huán)也采用了高靈敏跟蹤技術(shù)以保證跟蹤靈敏度高于捕獲靈敏度。這種測試方法不僅可以得到真實環(huán)境下該算法的捕獲性能,也可以驗證高靈敏算法在實際使用時的可用性。
3.1BDS B1I信號測試結(jié)果
為了保證該算法對于北斗導(dǎo)航系統(tǒng)的兼容型,本文設(shè)置FPGA及其模數(shù)轉(zhuǎn)換(AD)芯片輸入時鐘為62 MHz,經(jīng)下變頻后的中頻數(shù)據(jù)的中心頻率為40.42 MHz。設(shè)置碼片滑動的分辨率,即捕獲偽碼分別率為0.165個碼片,普通及高靈敏捕獲性能圖7所示。
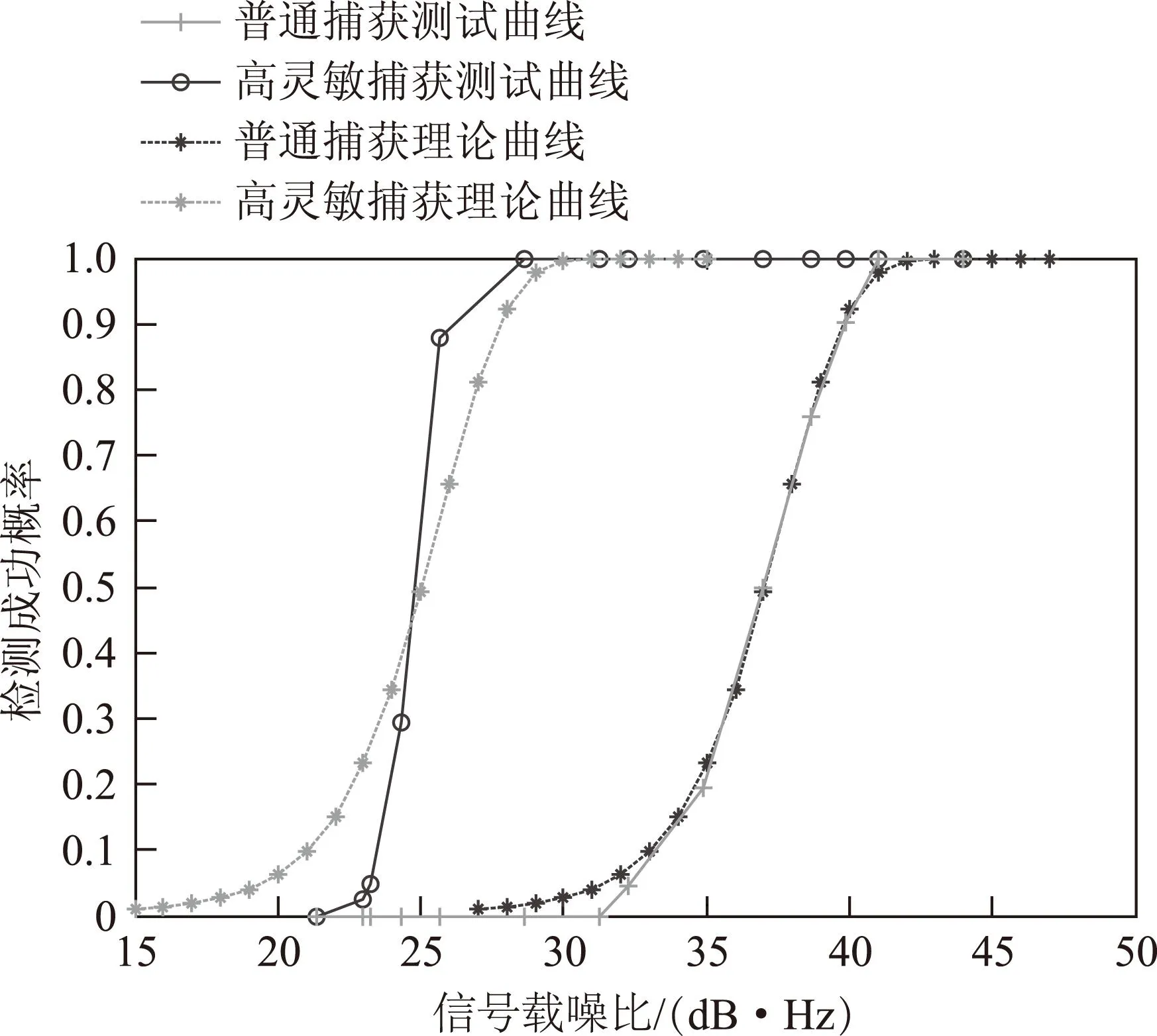
圖7 BDS B1I信號捕獲靈敏度
3.2GPS L1 C/A 信號測試結(jié)果
GPS L1 C/A捕獲算法的參數(shù)配置與BDS B1I信號一致,普通及高靈敏捕獲性能如圖8所示。
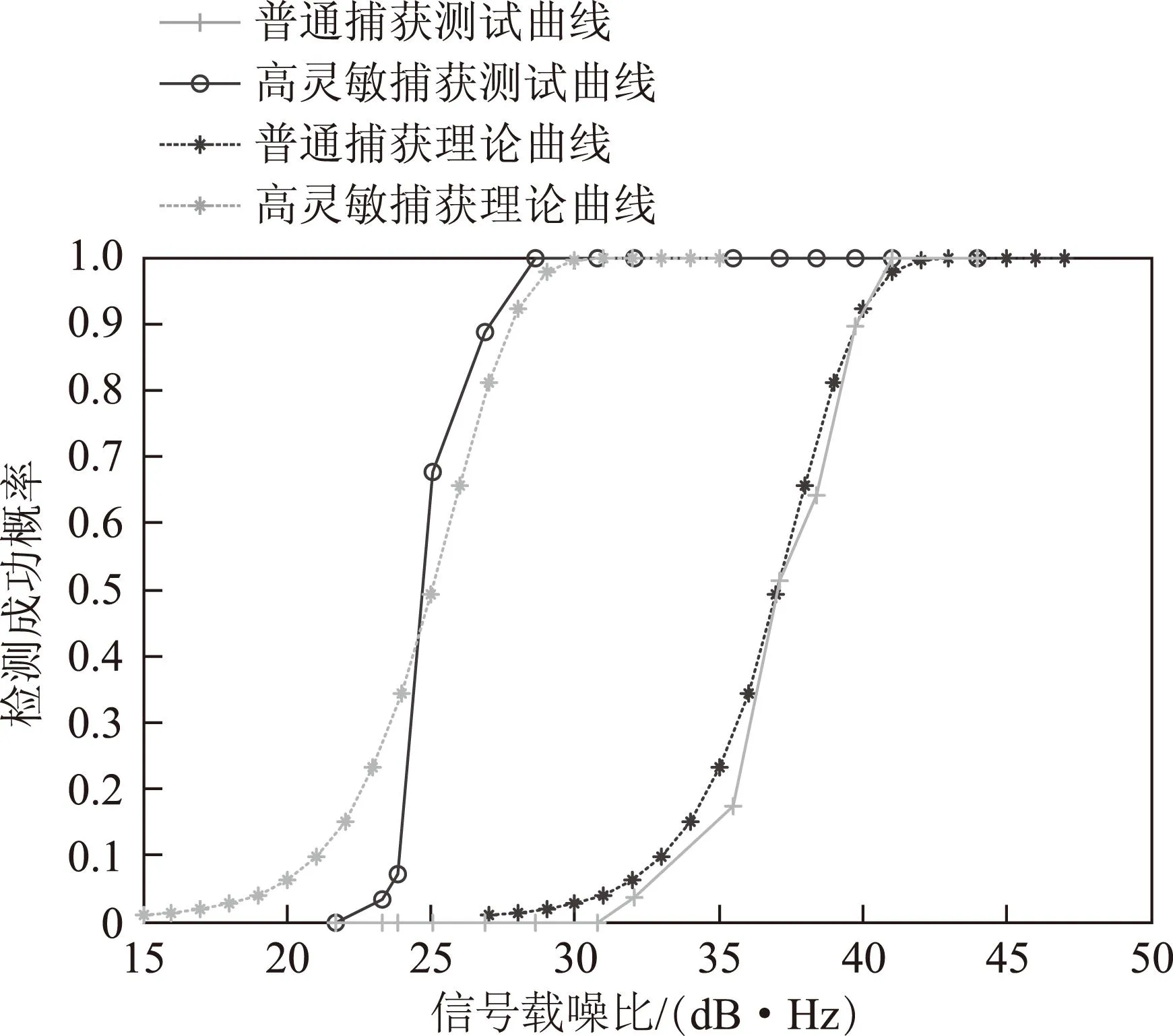
圖8 GPS L1 C/A信號捕獲靈敏度
4結(jié)束語
本文提出了一種兼容型高靈敏捕獲算法。該算法可通過接口配置捕獲多個頻點、多個類型的導(dǎo)航信號。 該算法通過多周期相干積分和非相干積分延長積分時間以實現(xiàn)弱信號的捕獲,特別適用于多模高靈敏接收機(jī)。此外,筆者還將該算法在FPGA硬件平臺上實現(xiàn),并用BDS B1I信號及GPS L1 C/A信號實際測試了其性能。測試結(jié)果表明,該算法具備兼容型功能,只需改變捕獲模式設(shè)置、高靈敏捕獲設(shè)置及中心頻率三個接口的配置便可以捕獲多個類型普通信號及高靈敏信號,捕獲靈敏度可以達(dá)到26 dB·Hz。
參考文獻(xiàn)
[1]王彥玢.北斗衛(wèi)星導(dǎo)航系統(tǒng)正式提供區(qū)域服務(wù)[EB/OL].(2012-12-27)[2015-10-29].http://www.beidou.gov.cn/.
[2]趙靜,曹沖.GNSS系統(tǒng)及其技術(shù)的發(fā)展研究[J].全球定位系統(tǒng),2008,33(5):27-31.
[3]KAPLAN E D,HEGARTY C.Understanding GPS:principles and applications[M].2nd ed.Boston:Artech House,2006:219-223.
[4]SPANGENBERG S M,SCOTT I,MCLAUGHLIN S,et al.An FFT-based approach for fast acquisition in spread spectrum communication systems[J].Wireless Personal Communications,2000,13(1/2):27-55.
[5]何露,魯振鵬,李健,等.基于部分匹配濾波器和FFT的信號捕獲方案的設(shè)計與實現(xiàn)[J].科學(xué)技術(shù)與工程,2012,12(9):2048-2052.
[6]劉艷華,趙剛.基于PMF-FFT的PN碼捕獲方法及性能[J].通信技術(shù),2009(1):24-26.
[7]LIN D M,TSUI J.An efficient weak signal acquisition algorithm for a software GPS receiver[C]//The Institute of Navigation,Inc.Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GPS 2001).Salt Lake City, Utah:The Institute of Navigation,Inc.,2001:115-136.
[8]費威,應(yīng)忍冬,劉佩林.GPS/北斗雙模導(dǎo)航接收機(jī)捕獲器硬件設(shè)計與優(yōu)化[J].信息技術(shù),2013(6):4-7.
[9]謝鋼.GPS原理與接收機(jī)設(shè)計[M].北京:電子工業(yè)出版社,2009:354-355.
[10]李文剛,黃鑫磊,劉龍偉.低信噪比環(huán)境下的長碼捕獲新算法[J].西安電子科技大學(xué)學(xué)報.2013,40(4):29-36.
Research and Implementation of Compatible High-sensitivity Acquisition Algorithm
LIUYifen,JINTian
(Electronic Information Engineering Institute,Beihang University,Beijing 100191,China)
Abstract:In order to solve the usability problem of multimode receiver in weak signal environments,this article presents a high-sensitivity acquisition algorithm in the main of BDS B1 signals and compatible with multiple system signals.In this paper,partial matched filter algorithm based on fast Fourier transform is chosen as the acquisition method,coherent-non-coherent integration is also used to extend the integration time.The article also achieves the requirement of compatibility,which could acquire multiple signals with High-sensitivity method.In practical applications,the algorithm can start acquisition after getting preset of inputting signal type,center frequency,acquisition mode (Normal/High-sensitivity) via interface.Finally,the algorithm will also be realized on the FPGA hardware platform,and actually tested of the acquisition sensitivity of real signals.The result shows that acquisition sensitivity can reach 26dBHz.
Key words:acquisition;high-sensitivity;compatibility;GNSS;BDS
中圖分類號:P228
文獻(xiàn)標(biāo)識碼:A
文章編號:2095-4999(2016)-01-0103-06
作者簡介:第一劉益芬(1991—),女,湖南益陽人,碩士生,主要從事衛(wèi)星導(dǎo)航接收機(jī)算法研發(fā)工作。
基金項目:國家自然科學(xué)基金(61471017、41374137、61101076);國防技術(shù)基礎(chǔ)科研計劃支持(J1320130001)。
收稿日期:2015-06-24
引文格式:劉益芬,金天.兼容型高靈敏捕獲算法的硬件實現(xiàn)方案[J].導(dǎo)航定位學(xué)報,2016,4(1):103-108.(LIU Yifen,JIN Tian.Research and Implementation of Compatible High-sensitivity Acquisition Algorithm[J].Journal of Navigation and Positioning,2016,4(1):103-108.)DOI:10.16547/j.cnki.10-1096.20160120.