教學用氣動機械手的研制
2016-05-30 10:10:45李碩唐勤生王朝兵
科技資訊 2016年1期
李碩 唐勤生 王朝兵

摘 要:介紹了一種采用PLC控制,以氣缸作為動力元件的氣動機械手結構、工作原理、動作過程。采用PLC的控制,實現氣動機械手的三種運行方式:單步、循環以及復位。通過學生自主裝拆實驗證明氣動機械手控制簡單、運行穩定、裝拆簡便、安全,適合于學校教學實驗。
關鍵詞:氣動機械手;氣缸;PLC
中圖分類號:TP241 文獻標識碼:A 文章編號:1672-3791(2016)01(a)-0000-00
Abstract:This paper introduces the pneumatic manipulator which is controlled by a PLC and using cylinder as the power components,the structure,working principle and action process .To realize three kinds of operation modes by PLC:single step,circulation,and reset.To prove the simple control,stable running,convenient installation,safe and suitable for the school teaching of the pneumatic manipulator by PLC.
Key Word:pneumatic manipulator;cylinder;PLC(Programmable logic Controller)
1 前言
在科技飛速發展的今天,氣動機械手取代人力進行操作已經是十分普遍的事情。氣動機械手憑借其定位準確、效率高、結構簡單以及控制方便等優點在自動化生產線上 得到了廣泛的應用。尤其是用機械手來代替人力進行一些高危、繁重的操作。同時,氣動機械手又是集機械結構、氣動系統與控制系統于一體的典型的機電一體化產品。本文介紹的是適合學校教學、可以讓學生自行安裝、調試,進行課程教學實驗的氣動機械手。
2 氣動機械手的結構以及工作原理
2.1氣動機械手的機械結構:
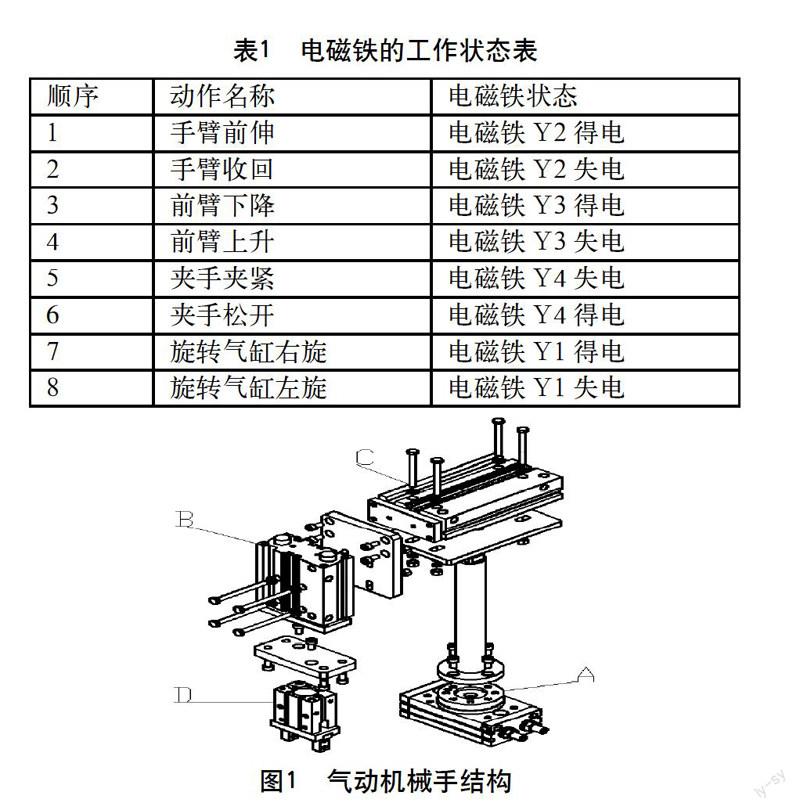
圖1為氣動機械手的結構示意圖,它總共包括了旋轉氣缸A、升降氣缸B、伸縮氣缸C、夾手氣缸D。其主要元件的功能為:
A 旋轉氣缸:控制機械手臂的旋轉。
B 升降氣缸:控制手臂的下降與提升。
圖1 氣動機械手結構
C 伸縮氣缸:控制手臂的伸出與縮回。
D 夾手氣缸:控制手指的松開與夾緊。
氣動機械手的機械結構具有如下的特點:
1) 便于制造。
2) 適合學生裝拆實驗,適用于教學。
2.2氣動機械手的氣動系統:
機械手氣動系統應滿足系統作用要求,結構盡可能的簡單些,以便于實驗時組裝與拆卸,應滿足一下三點要求:
1) 機械手結構要滿足最基本的安全性,夾手氣缸在電磁鐵失電的狀態下仍處于夾緊狀態。
2) 手臂升降氣缸和手臂伸縮氣缸采用具有導向功能的氣缸。
3)所有氣缸元件的活塞上都應該帶有磁環,以便氣缸外的磁性開關發出信號控制機械手的工作順序和下一步的動作。
2.3氣動機械手的控制系統:
氣動機械手的控制系統可選用繼電器控制、PLC控制、微機控制和單片機控制。根據實驗的要求,可更換不同的控制模塊即可實現不同的控制方式,試驗中選擇PLC控制。
采用PLC具有工作系統穩定,抗干擾能力強,便于編寫程序,安裝簡單、維修方便等優點。選擇PLC控制,機械手的控制系統由一臺PLC組成,當氣缸工作到位時,他將信號傳給PLC,再由PLC根據控制程序發出指令,來控制下一步動作。
3 氣動機械手的PLC控制系統
3.1氣動機械手的電磁鐵的工作狀態。
當氣缸活塞出于伸出狀態時,電磁鐵出于得電狀態,當氣缸活塞收回時,電磁鐵出于失電狀態。
3.2氣動機械手的原位狀態:
氣動機械手處于原位狀態時,旋轉氣缸處于0度(左旋到底)狀態,升降氣缸和伸縮氣缸的活塞都處于收回狀態。手指氣缸處于松開狀態。
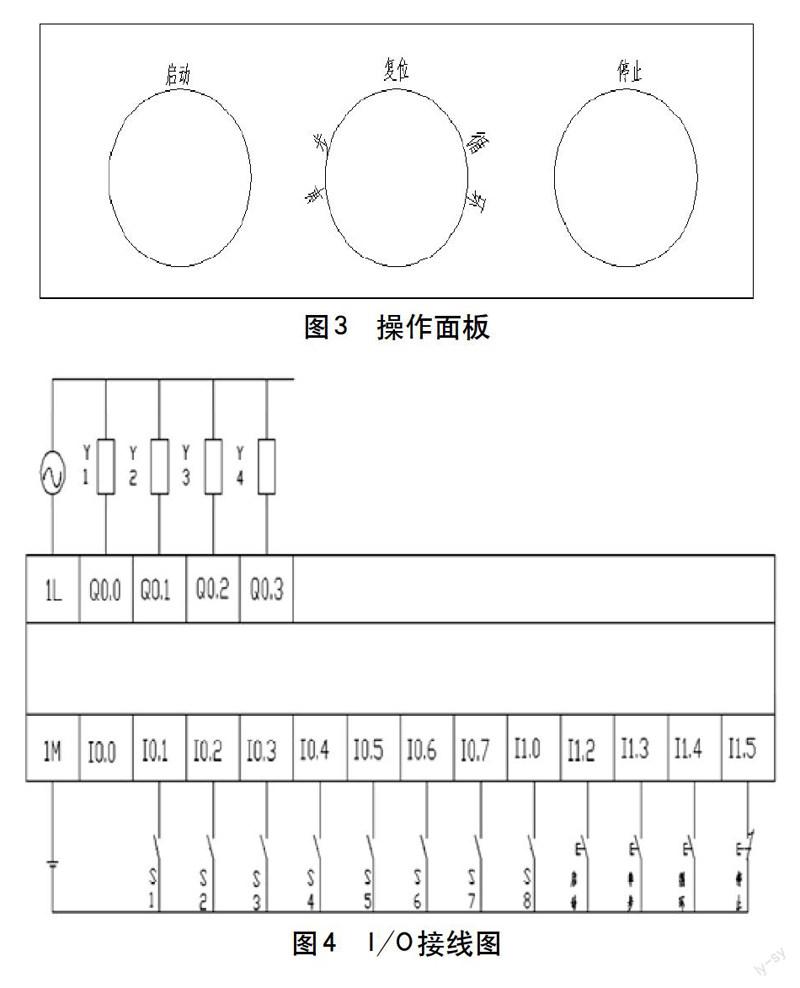
3.3氣動機械手的操作面板:
機械手的開關面板有一個三擋開關按鈕和兩個按動按鈕組成。
3.4氣動機械手PLC控制接口圖:
氣動機械手采用西門子S7-200系列PLC,其I/O接線圖如圖4所示。
3.5氣動機械手的工作順序:
該氣動機械手的工作過程為:原位→啟動→手臂前伸S4→前臂下降S6→夾手夾緊S7→前臂上升S5→手臂收回S3→旋轉氣缸右旋180度S2→手臂前伸S4→前臂下降S6→夾手松開S8→前臂上升S5→手臂收回S3→旋轉氣缸左旋180度S1→停止→原位。3.6氣動機械手PLC控制程序設計:
采用西門子公司PLC編程軟件進行編程設計,編程方法則是使用的最多的圖形編程語言——梯形圖,這種方法邏輯清晰,直觀易懂很容易被人掌握。
氣動機械手PLC控制程序含有三部分,即復位程序、循環程序位和單步程序。
1) 復位程序要求
將三擋開關撥到復位檔,I1.3和I1.4都無輸入信號,按下啟動按鈕,I1.2有一輸入信號,則Q0.0、Q0.1、Q0.2都無輸出信號,Q0.3有一輸出信號,即Y1、Y2、Y3失電,Y4得電,旋轉氣缸左旋,手臂收回,前臂上升,前臂上升,S1、S3、S5、S7閉合,I0.1、I0.3、I0.5、I0.7有一輸入信號,機械手回到原位。
2) 循環程序要求
將三擋開關撥到循環檔,I1.4有一輸入信號,按下啟動按鈕,I1.2有一輸入信號Q0.1有一輸出信號,Y2得電,手臂前伸,S4閉合,I0.4有一輸入信號,Q0.2有一輸出信號,Y3得電,前臂下降,S6閉合,I0.6有一輸入信號,……,依次類推,機械手將按照工作順序動作下去。按下停止按鈕后,機械手將停止動作。
3) 單步程序要求
將三擋開關撥到單步檔,I1.3有一輸入信號,按下啟動按鈕,I1.2有一輸入信號,Q0.1有一輸出信號,Y2得電,手臂前伸,S4閉合,I0.4有一輸入信號,再按下啟動按鈕,Q0.2有一輸出信號,Y3得電,前臂下降,S6閉合,I0.6有一輸入信號,再按下啟動按鈕,……,依次類推,機械手將按照工作順序,每按一次按鈕動作一步。
4 結論:
氣動機械手是集機械結構,氣動系統與控制系統于一體的典型的機械結構。它具有操作方便,拆卸簡單,適用于學生教學的特點。
[參考文獻]:
[1] 王紅梅,方貴盛. 基于PLC與步進電機的氣動搬運機械手控制[J] 液壓與氣動. 2009.
[2] 蔣少茵. 機械手模型與設計[J]華僑大學學報(自然科學版). 1998(10).
[3] 廖常初. S7-200 SMART PLC編程及應用.第二版[M]機械工業出版社. 2015.
