帶有負載轉矩觀測器的PMSM自適應反步控制
2016-06-04 06:02:29朱曉虹孫明山
電機與控制應用 2016年4期
關鍵詞:永磁同步電機
張 虎, 朱曉虹, 孫明山
(1. 蘇州高等職業技術學校,江蘇 蘇州 215009;2. 南京工業大學 電氣工程與控制科學學院,江蘇 南京 211816;3. 中科院蘇州生物醫學工程技術研究所,江蘇 蘇州 215163)
?
帶有負載轉矩觀測器的PMSM自適應反步控制
張虎1,朱曉虹2,3,孫明山3
(1. 蘇州高等職業技術學校,江蘇 蘇州215009;2. 南京工業大學 電氣工程與控制科學學院,江蘇 南京211816;3. 中科院蘇州生物醫學工程技術研究所,江蘇 蘇州215163)
摘要:針對永磁同步電機(PMSM)的非線性特點,引入了反步控制方法。該方法設計過程簡單,且能夠實現PMSM控制系統的完全解耦,控制效果明顯優于傳統的PI控制方法。考慮到在電機運行過程中電阻易受溫度變化而改變阻值,提出了自適應方法與反步法相結合的控制策略,克服了參數改變對系統穩定性能的影響。設計了一套負載轉矩滑模觀測器來降低負載實變對速度的影響,將辨識的轉矩引入電流環控制中實現電流的前饋補償。仿真結果表明,自適應反步控制與負載觀測器相結合能夠有效提高控制系統的動態響應速度,使系統具有較強的魯棒性。
關鍵詞:永磁同步電機(PMSM); 反步控制; 自適應控制; 負載轉矩觀測器
0引言
永磁同步電機(Permanent Magnet Synchronous Motor, PMSM)具有結構簡單、體積小、運行可靠、功率因數高、力矩慣量比大、損耗小等優點,由其構成的控制系統被廣泛用于航空航天器、進攻武器系統、數控機床、電梯、信息系統等[1]。然而,由于PMSM是一個多變量、強耦合、非線性的復雜對象[2-3],通常使用矢量控制方法對其進行解耦控制,而矢量控制系統的傳統PI控制器抗擾動能力較弱,所以為了解決一般的線性控制方法效果不夠理想的問題,采用非線性控制方法。當前的一些非線性控制方法有: 自抗擾控制、滑模變結構控制、自適應控制、模糊控制、神經網絡、反步控制等[4-5]。各種方法都有其優缺點,因此將多種方法相結合控制不失為一種有效的解決方式。
方一鳴學者提出了一種基于終端滑模負載觀測的反步控制方法[5],解決了系統在負載擾動下控制精度低的問題,然而反步控制沒有考慮電機參數變化會對系統產生影響,因此很難達到快速準確的速度跟蹤。文獻[6-7]提出將滑模狀態觀測器代替速度外環的PI控制器,結果表明控制系統性能的確有所改善,但并未很好解決滑模控制帶來的抖動問題。文獻[8]提出一種將自抗擾控制與反步法相結合的復合控制策略,結果表明該控制策略實現了轉速無超調、適應范圍廣且系統抗擾動性能強。文獻[9]設計了一種反推自適應轉速和電流控制器,實現了對摩擦力矩的補償,解決了電機低速運行時摩擦力矩帶來的不利影響。文獻[10]設計了一種具有抗擾動能力的自適應轉矩控制器,該控制器能夠對狀態慣量進行實時估計并對控制器各參數進行在線整定,使得系統具有良好的動靜態性能。
本文針對同步電機這一非線性系統以及電機固有參數變化,將自適應方法和反步法結合設計了速度估計器和電流控制器,使用李雅普諾夫穩定判據設計子系統,最終獲得了系統實際的控制量;針對系統參數的變化設計了自適應律,保證系統達到全局穩定。為了使系統克服負載突變對速度波動的影響,設計了負載滑模觀測器對定子電流進行補償。
1PMSM數學模型
面貼式PMSM在d-q旋轉坐標系下的機械運動、電磁轉矩和定子電流方程分別為
(1)
(2)
(3)
(4)
式中:L、R、Ψf——定子電感、定子電組、轉子永磁體磁鏈;
np——電機極對數;
B、J——摩擦因數、轉動慣量;
Te——電磁轉矩;
TL——負載轉矩;
ωr——電機機械角速度;
id、iq、ud、uq——定子電流、定子電壓在d-q軸上的分量。
2反步自適應控制器設計
反步自適應控制器設計分為兩步: 轉速控制器設計和電流控制器設計。首先,根據系統的給定速度和反饋速度確定速度誤差,設計合適的Lyapunov函數和虛擬控制量,只要實現虛擬控制就能夠使速度誤差達到收斂;隨后,為了進行電流解耦控制,需要設計第二個子系統,此時會用到第一個子系統設計的虛擬控制量,保證兩個子系統相關聯,從而完成整個控制律的設計,實現系統最終穩定。由于電機電阻阻值的變化,針對電阻設計自適應律以消除參數改變對電機速度響應及魯棒性產生的影響。
2.1速度控制器設計
定義速度誤差為
e=ω*-ωr
(5)
式中:ω*——給定轉速;
ωr——電機實際轉速。
選擇e為第一個子系統的虛擬狀態變量,對e求導可得
(6)
根據公式構造Lyapunov函數如下:
(7)

(8)

2.2電流控制器設計
為了實現PMSM電流解耦控制以及速度跟蹤,設計第二個子系統,選擇參考電流如下:
(9)
電流誤差變量為
(10)
對式(10)求導可得
(11)

(12)
(13)
對式(13)求導得
(14)

ud=Rid-npLωriq+k2Led k2>0 (15)
k3>0
(16)
自適應律:
(17)
把式(15)、(16)、(17)代入式(14)可得:
(18)
由式(15)~式(17)可以看出,自適應反步控制展現了PMSM良好的速度跟蹤和電流跟蹤能力,使得系統快速響應的同時還能克服定子電阻變化對系統性能的影響,使系統具有很強的魯棒性。
3負載轉矩觀測器設計
在PMSM調速系統中,負載帶來的變化在很大程度上影響到實際速度的變化;對于魯棒性差的系統來說,一旦負載突變,速度將無法恢復到給定值。因此,本文設計了一種負載轉矩滑模觀測器,將估計的轉矩值補償到電流環中,增強系統抗干擾能力。
根據式(1)、(2),將負載轉矩和電機機械速度作為狀態變量,構建PMSM狀態方程:
(19)
在式(19)的基礎上,構建PMSM擴展滑模觀測器:
(20)
將式(20)減去式(19)可得
(21)
(22)
(23)
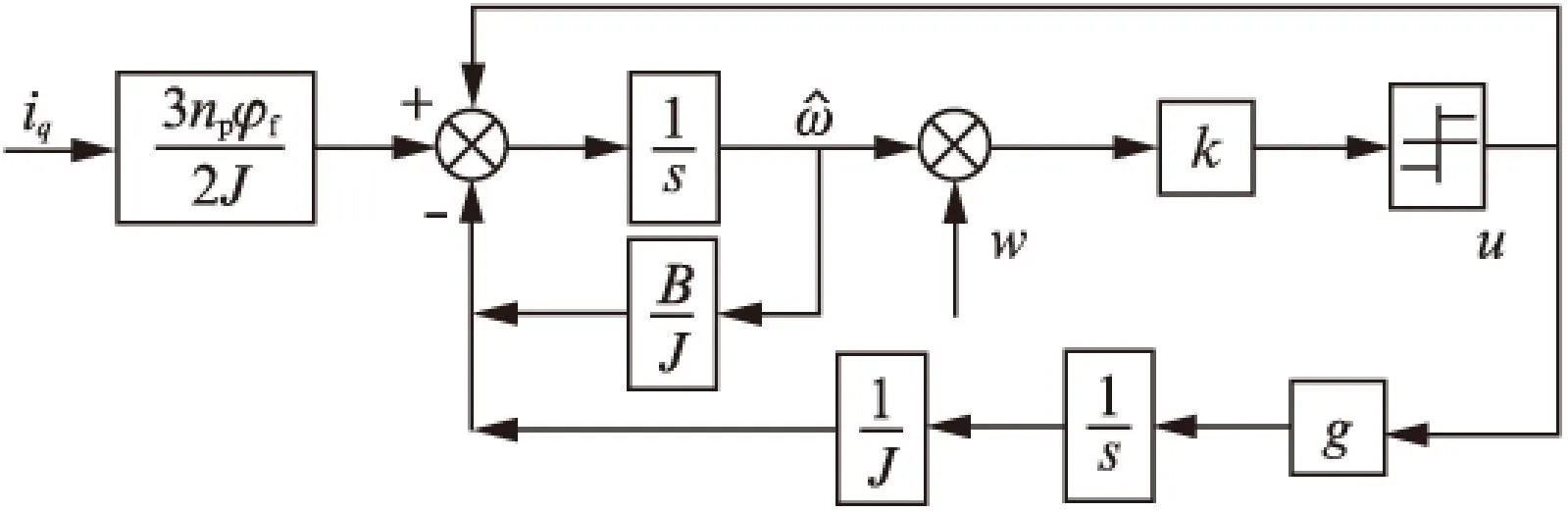
圖1 負載轉矩觀測器結構圖
4仿真驗證
為了驗證基于轉矩滑模觀測器的PMSM自適應反步控制性能,在MATLAB/Simulink下搭建了整個控制系統的仿真模型。其中PMSM的具體參數為: 定子電阻Rs=2.875Ω,定子電感Ls=0.0085mH,轉子磁鏈Ψf=0.175Wb,轉動慣量J=0.0008kg·m2,摩擦因數B=0.0001,電機極對數np=2。
圖2、圖3分別是在自適應反步控制下PMSM低速、高速運行時的速度響應圖。從圖2可以看出,在極低速的情況下(ωr=20r/min)時,除剛運行階段超調較大之外,PMSM很快能達到穩定并保持良好的運行狀態。同樣,從圖3可以看出,在高速運行時,系統上升時間短,大約經過0.02s之后達到額定速度。
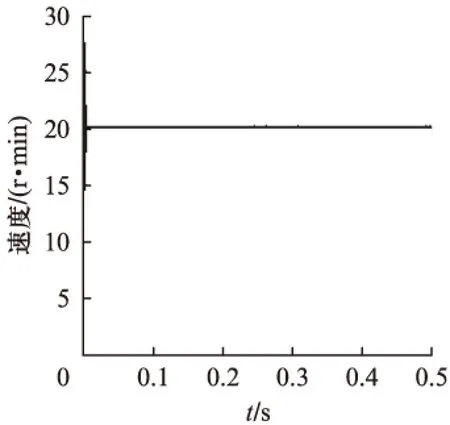
圖2 給定速度20r/min時轉速波形
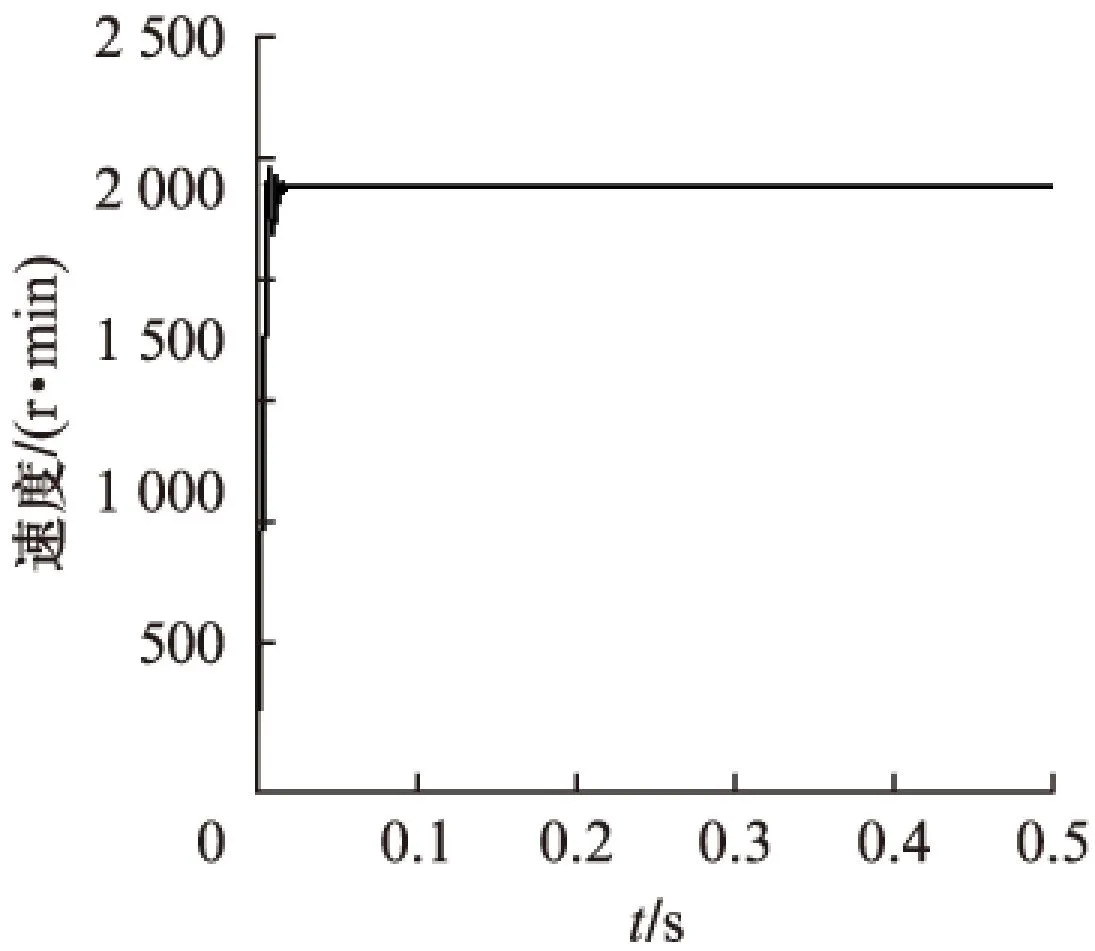
圖3 給定速度2000r/min時轉速波形
圖4是電阻在0.3s放大1倍時的速度波形圖。由圖4可以看出,自適應律對參數變化有非常顯著的效果,速度基本無變化。

圖4 0.3s電阻增大1倍時的轉速
圖5是未加入負載轉矩觀測器與加入負載轉矩觀測器之后的仿真結果對比結果圖。在0.3s時,分別加入了15N的負載,由圖5可清晰看出加入了負載轉矩之后的PMSM對抗負載突變的能力更強。
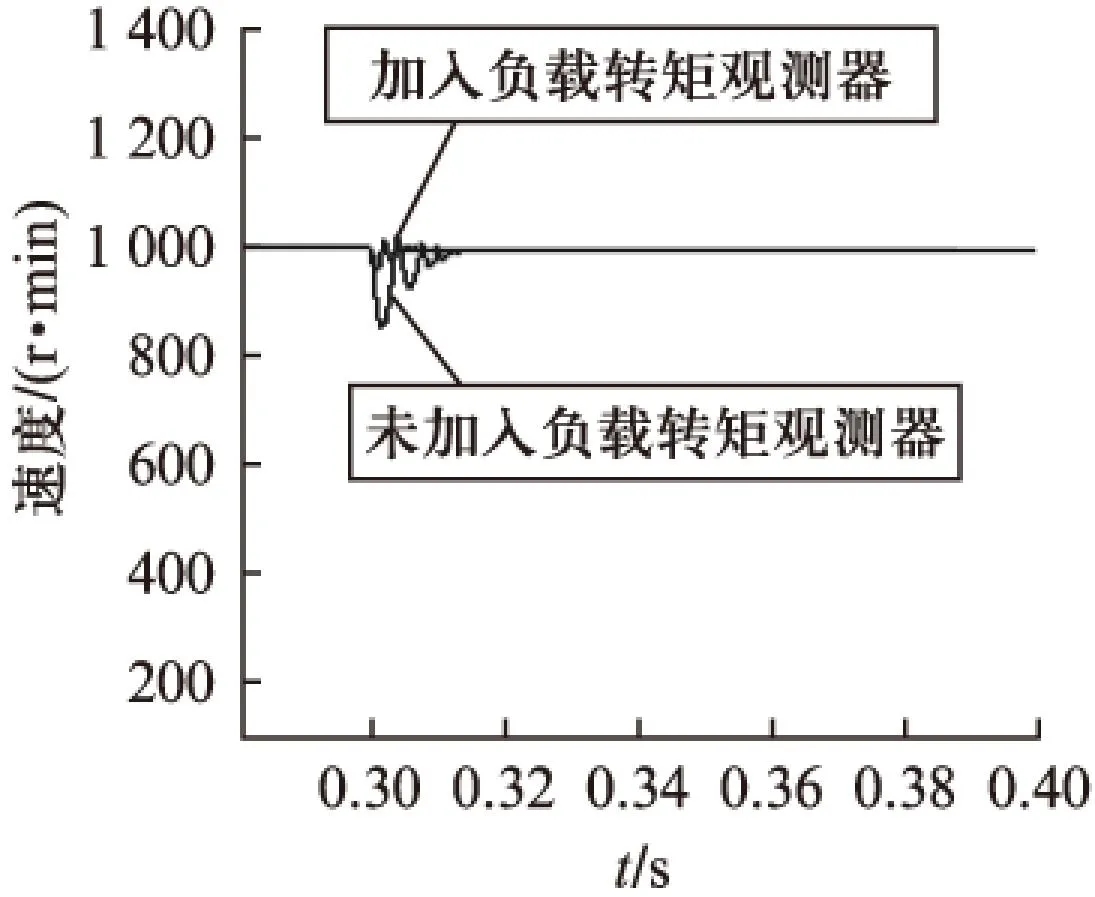
圖5 加入負載轉矩觀測前后對比波形
圖6~圖7是將本文設計的新系統與擁有傳統PI速度控制系統的對比圖。同樣在0.3s時給系統加入15N的負載,傳統的PI速度控制器需要更長的時間來恢復(約0.1s)而本文設計的新控制器只需花約0.015s的時間就能回到給定速度,再一次證明具有負載觀測器的PMSM自適應反步控制具有良好的速度響應和魯棒性。
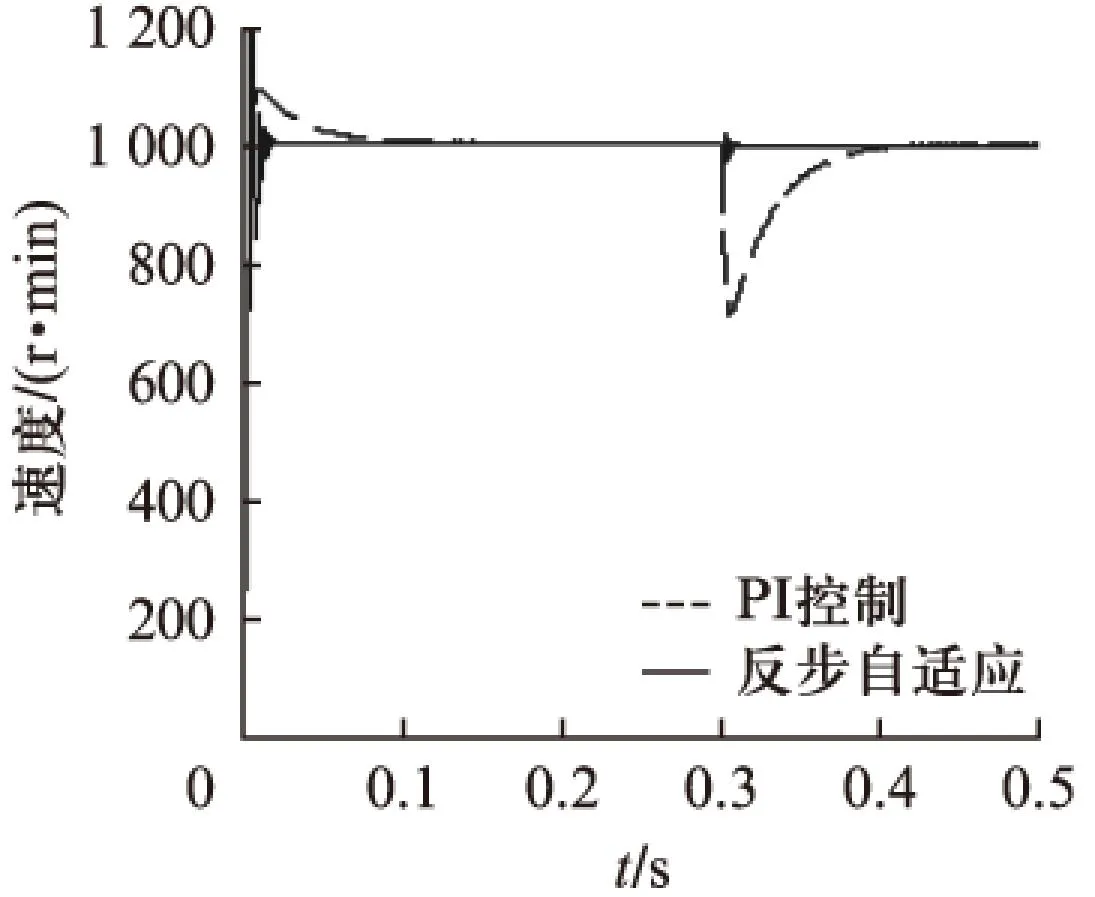
圖6 負載突變時新控制器與PI控制器對比圖
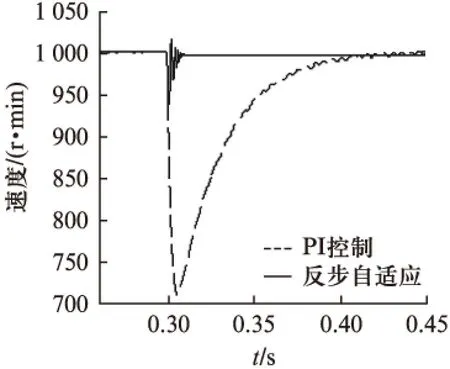
圖7 對比局部放大波形圖
5結語
本文對于PMSM這個非線性系統,提出了一種自適應反步控制器取代傳統的線性PI控制器,使得系統在電阻參數變化時仍能具有很高的調節能力以及自適應能力;同時針對負載擾動設計一套負載轉矩滑模觀測器,并加入到電流反饋環中,在負載干擾情況下提高了調速系統的響應時間,加快了速度誤差收斂。仿真結果證明了本文設計的的控制器的有效性與可行性。
【參 考 文 獻】
[1]鄭澤東,李永東.永磁同步電機控制系統綜述[J].伺服控制,2009(1): 22-25.
[2]張曉光,孫力,趙克.基于負載轉矩滑模觀測的永磁同步電機滑模控制[J].中國電機工程學報,2012,32(3): 111-116.
[3]寧博文,程善美,秦憶.基于負載轉矩觀測的PMSM直接轉矩反步控制[J].電氣傳動,2015,45(5): 26-29.
[4]鄭劍飛,馮勇,陸啟良.永磁同步電機的高階終端滑模控制方法[J].控制理論與應用,2009,26(6): 697-700.
[5]方一鳴,李智,吳洋羊,等.基于終端滑模負載觀測器的永磁同步電機位置系統反步控制[J].電機與控制學報,2014,18(9): 105-110.
[6]高雅,劉衛國.基于卡爾曼濾波的永磁同步電動機滑模控制[J].微特電機,2011(6): 41-43.
[7]PING X, JING B. SMC with disturbance observer for high performance PMSM[C]∥2011 International Conference on Mechatronic Science, Electric Engineering and Computer. Jilin: IEEE, 2011: 986-989.
[8]薛樹功,瞿成明,魏利勝.永磁同步電機自抗擾反步控制[J].計算機工程與應用,2012,48(3): 209-211.
[9]閻彥,劉銳,史婷娜,等.基于反推自適應控制的永磁同步電機摩擦力矩補償策略[D].天津: 天津大學電氣與自動化工程學院,2012.
[10]魯文其,胡育文,梁驕雁,等.永磁同步電機伺服系統抗擾動自適應控制[J].中國電機工程學報,2011,31(3): 75-81.
Adaptive Backstepping Control Strategy of PMSM Based on Load Torque Observer
ZHANGHu1,ZHUXiaohong2,3,SunMingshan3
(1. Suzhou Higher Vocational School,Suzhou 215009, China; 2. College of Electrical Engineering and Control Science, Nanjing TECH University, Nanjing 211816, China; 3. Suzhou Institute of Biomedical Engineering and Technology Chinese Academy of Sciences, Suzhou 215163, China)
Abstract:The backstepping control method was proposed due to the nonlinear characteristics of permanent magnet synchronous motor.The design of the method was simple, and it can decouple the control system completely so the method can achieve better control than traditional PI control method.Because of the temperature changes,resistance value will change also.We present a combination method of Adaptive Control and the backstepping control method to overcome the instability of the system influenced by parameters.In addition,we design a load torque sliding mode observer to reduce the influences of load change. The observed load torque was used for feed-forward compensation.Simulation results show that the adaptive backstepping control and the load observer can effectively improve the dynamic response speed of the control system,and make the system has strong robustness.
Key words:permanent magnet synchronous motor(PMSM); backstepping control; adaptive control; load torque observer
收稿日期:2015-09-06
中圖分類號:TM 341
文獻標志碼:A
文章編號:1673-6540(2016)04- 0017- 05
作者簡介:張虎(1986—),男,碩士研究生,助理講師,研究方向為檢測技術與自動化裝置。朱曉虹(1990—),女,碩士研究生,研究方向為電機控制技術。孫明山(1974—),男,博士,主要從事影像系統設計、物理仿真、系統集成以及系統性能分析和圖像質量評估研究。
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
