抗旋轉BD接收機跟蹤環路設計
2016-07-05 02:00:39胡鐵喬劉瑞杰李瑞琴
中國民航大學學報 2016年2期
胡鐵喬,劉瑞杰,李瑞琴
(中國民航大學智能信號與圖像處理重點實驗室,天津 300300)
?
抗旋轉BD接收機跟蹤環路設計
胡鐵喬,劉瑞杰,李瑞琴
(中國民航大學智能信號與圖像處理重點實驗室,天津300300)
摘要:在載體旋轉情況下,接收機接收到的導航衛星信號會附加較大的多普勒頻移,導致接收機跟蹤性能下降,甚至失鎖。針對這一問題,提出一種使接收機能正常跟蹤載體旋轉情況下導航衛星的設計方案。該設計在傳統環路基礎上加入輔助通道,實現載體旋轉轉速的實時估計以輔助環路跟蹤。經過仿真驗證,改進之后的環路能夠有效降低載體旋轉造成的不良影響,達到正常信號的跟蹤效果。
關鍵詞:載體旋轉;導航衛星信號;跟蹤環路;多普勒頻移
國內對于高速旋轉載體的定位導航有實際的需求,如炮彈類(旋轉半徑r<100 mm,30 Hz<旋轉頻率f<300 Hz)定位導航和戰略火箭類(500 mm<旋轉半徑r<2 m,旋轉頻率f<10 Hz)定位導航。載體在旋轉過程中會對導航衛星信號造成遮蔽,導致接收天線無法正常接收導航衛星信號。目前有2種方法可使接收天線正常接收導航衛星信號:①將多個接收天線均勻布置在高速旋轉載體表面上,使接收天線可以正常接收衛星導航信號[1];②將環狀微帶天線安放在高速旋轉的載體上,使接收天線可以正常接收衛星導航信號[2]。這兩種方法基本能夠保證衛星信號的連續接收,但天線相位中心偏離載體的旋轉軸,導致載體在高速旋轉情況下接收到的導航衛星信號相位存在與載體轉速和相位中心偏移量有關的調制效應,這種影響會使天線接收到的導航衛星信號發生很大變化,致使接收機工作異常,發生失鎖[3]。
國外已經實現智能炮彈和智能火箭彈的列裝,但尚未提及具體細節。目前國內文獻多為旋轉信號的建模以及旋轉對環路不同方面的影響,很少涉及對環路的改進措施。因此實現抗旋轉北斗(BD)接收機中跟蹤環路的設計具有一定的現實意義。
本文提出一種新的接收機跟蹤環路,新環路在傳統跟蹤環路[4]的基礎上新增一個輔助通道,對主通道進行二次解調,可有效降低載體旋轉對接收機跟蹤環路的影響,實現導航衛星信號在載體旋轉下的正常跟蹤。
1 高速旋轉下的信號模型
1.1旋轉模型的建立
高速旋轉載體不但擁有質點高動態的運動特性,而且新增了高速旋轉的姿態特性,給BD接收信號帶來較大影響,引起BD接收機失鎖[5]。為了分析這種變化對接收機處理導航衛星信號的影響,需要建立旋轉模型分析接收到的導航衛星信號在高速旋轉載體下的具體變化規律。
假設載體的自旋運動為旋轉臺運動,并以y軸作為轉臺的旋轉軸。l1和l2分別是衛星信號入射方向在xoz和xoy平面上的投影;角度φ是衛星信號入射方向與z旋轉軸的夾角;α是l1和衛星信號來向的夾角,β 是l1與z軸的夾角;θ為l2與x軸的夾角;w為轉臺旋轉角速度,r為旋轉半徑,vr為切向速度,如圖1所示。
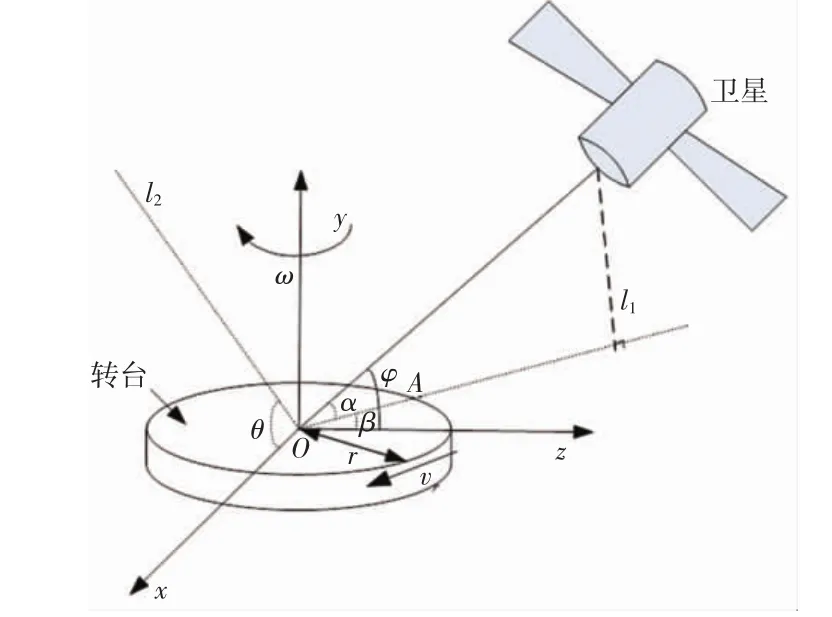
圖1 模擬轉臺Fig.1 Simulation turntable
1.2高速旋轉引起的多普勒頻移和相位變化
由旋轉引起的接收信號多普勒頻移[6]為

其中:vr為天線繞旋轉軸運動的切向速度;f為信號頻率,c為光速。假設衛星不運動,且根據幾何關系可得載體旋轉帶來的接收機和衛星之間的多普勒[7]為

其中:fr是高速旋轉載體的旋轉頻率;fBD是BD衛星信號的載波頻率;fCA是BD衛星測距碼頻率。
載波相位變化為

其中:△d為相對位置變化;λ為BD衛星信號波長。
利用幾何投影關系,得到天線相位中心和衛星之間的相對位置變化為

最終引起的相位變化為

通過上述分析可以看出,高速旋轉載體會帶來附加的多普勒頻移和載波相位變化[8],且其都隨時間t呈周期性正弦變化,正弦頻率等于高速旋轉載體的旋轉頻率。
在實際生活中,高速旋轉載體通常在一段時間內飛行方向較為穩定,因此衛星信號的入射方向在一定程度上是固定的,即α、β可以是不變的。本文設α= 0°、β= 45°,既可模擬衛星信號的入射方向,又可簡化信號模型。將上述推導出的相位變化加入中頻信號以模擬載體旋轉條件下的導航衛星信號。
2 抗旋轉跟蹤環路設計
載體旋轉會使接收機接收的BD信號附加有周期性正弦變化的多普勒頻移。如果已知載體旋轉轉速,則可利用式(2)計算出附加的多普勒頻移,從而消除載體旋轉對接收機跟蹤環路的影響。為此提出一種可消除旋轉影響的環路結構,通過引入輔助通道載波鑒相結果來獲取載體旋轉的轉速[9],利用輔助通道獲取的轉速信息對主通道進行二次解調,消除載體旋轉對導航衛星信號附加的周期性正弦變化的多普勒頻移,以改善在載體旋轉情況下接收機對接收到的導航衛星信號的解算能力[10]。
2.1載體旋轉參數估計
利用旋轉頻率可消除載體旋轉的影響,因此本節主要對旋轉頻率進行估計。設計如下高動態場景(V = 1 000 m/s,加速度= 1 g,加加速度= 1 g/s),旋轉半徑r = 30 mm且固定不變,旋轉頻率fr變化如表1所示,載噪比C/NO = 46 dB。測試不同旋轉頻率對原有高動態環路的影響。
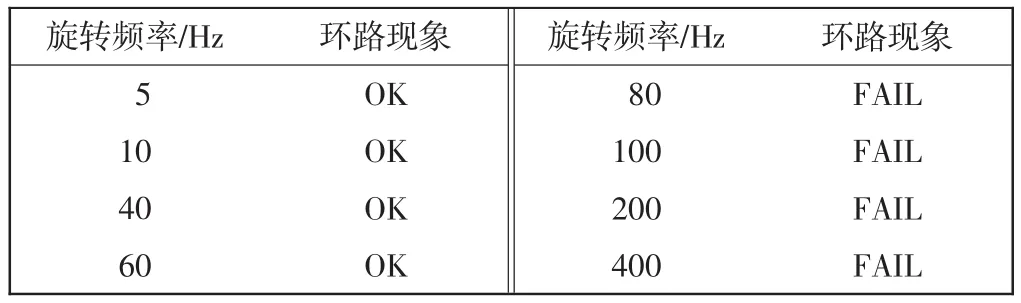
表1 旋轉頻率對環路跟蹤影響的測試Tab.1 Influence test of high speed rotation ω to loop tracking
其中:OK表示捕獲、牽引、跟蹤和定位解算都正常,FAIL表示捕獲正常,牽引正常,跟蹤不正常。由測試結果可知,旋轉頻率fr≤60 Hz時,接收機可以正常捕獲、跟蹤和定位,當旋轉頻率fr大于80 Hz時,跟蹤環路跟蹤失鎖,導致定位解算無法進行。
對旋轉頻率為200 Hz與沒有旋轉情形下的載波鑒相曲線進行比較,如圖2所示。從圖中可以看出,載體旋轉情況下的載波鑒相在原有鑒相基礎上調制有周期性正弦信號,頻率等于旋轉頻率。由此可見,原有高動態環路可測出載體旋轉轉速且與仿真設置的旋轉頻率相一致。
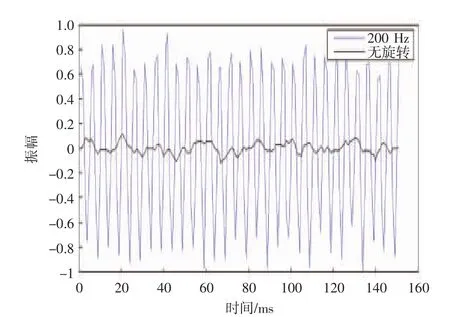
圖2 載體旋轉與不旋轉下載波鑒相曲線的比較Fig.2 Comparison of carrier phase curves under rotation and non-rotation
2.2環路結構調整
為實現載波相位正弦調制的實時估計和對消,每顆衛星使用2個通道(主通道和輔助通道)進行跟蹤,輔助通道進行載體旋轉造成載波相位正弦調制的實時測量,將實時測量的相位值反饋給主通道進行實時調相,實現相位的實時對消。為保證輔助通道相位與主通道一致,主輔通道跟蹤環路的鎖相環(phase-locked loop,PLL)、鎖頻環(frequency-locked loop,FLL)和延遲鎖相環(delay-locked loop,DLL)的參數保持一致。輔助通道狀態完全同步于主通道狀態,輔助通道不進行比特(BIT)同步測量和載噪比C/NO的計算,如圖3所示。
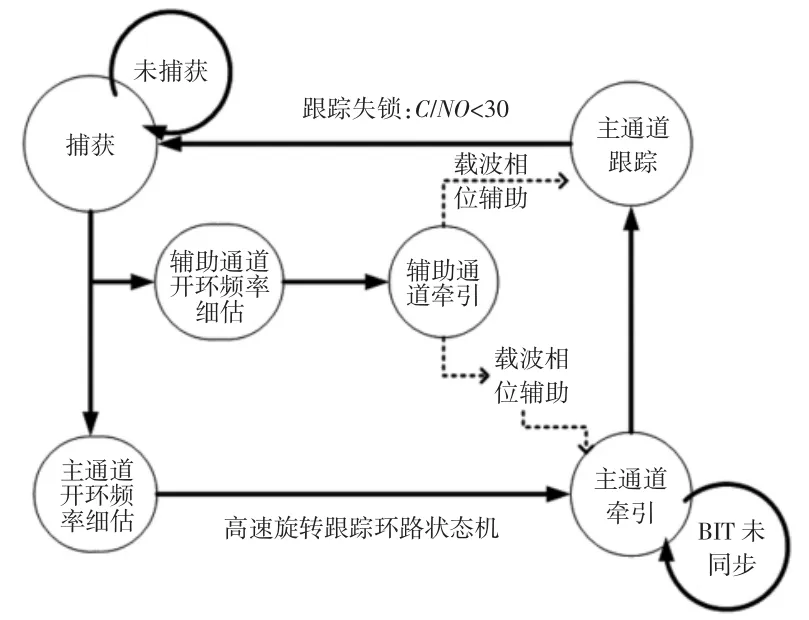
圖3 環路結構調整示意圖Fig.3 Schematic diagram of loop structure adjustment
原來12通道的接收機,改進之后要擴展為24個通道,每個主通道附加1個輔助通道來消除載體旋轉帶來的周期性正弦變化的多普勒。
2.3主通道I/Q二次解調框圖
環路主通道I/Q二次解調計算公式為


其中:i_ prompt和q_ prompt為主通道即時支路相關器輸出的1 ms相干積分值,phaseErr為輔助通道載波鑒相結果,SPR和SPI為二次解調后的結果,P_A_I為輔助通道即時支路,P_A_Q為相關器輸出的1 ms相干積分值,最終由其來參與定位及解算,如圖4所示。
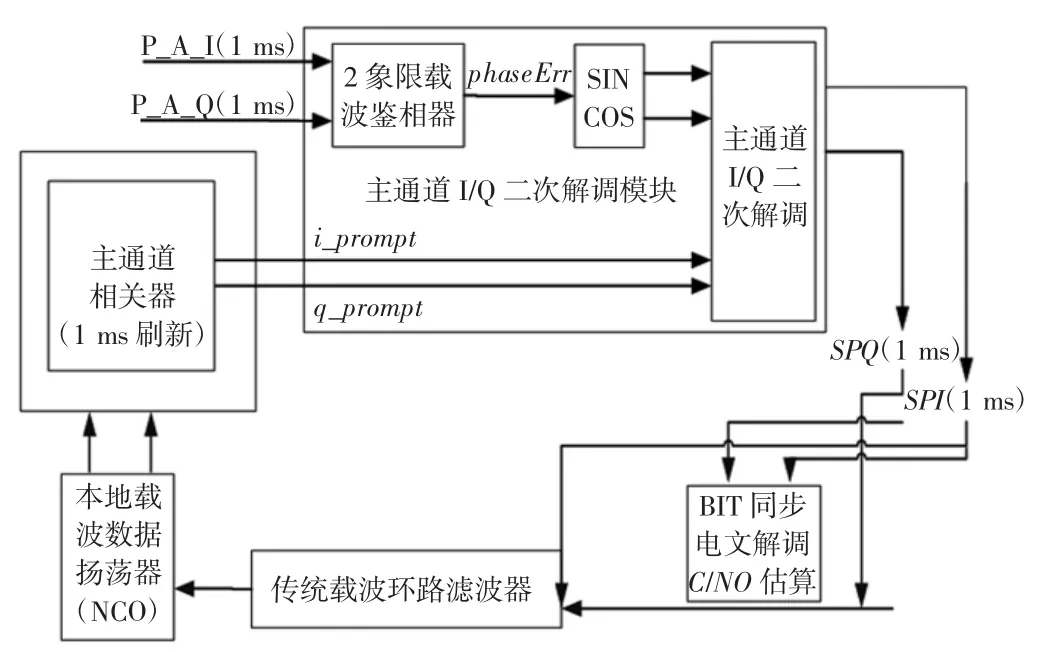
圖4 抗旋轉跟蹤環路主通道I/Q二次解調框圖Fig.4 Anti-rotation tracking loop demodulator block diagram of main channel I/Q
3 抗旋轉二次解調跟蹤環路性能驗證
通過北斗二代B3頻點(BD2-B3)模擬器和BD2-B3軟件接收機仿真驗證抗旋轉BD接收機跟蹤環路的性能。
3.1仿真設置
在軟件仿真平臺中,由BD2-B3模擬器生成在載體旋轉情況下接收機接收到的導航衛星信號,參數配置如表2所示。將模擬生成的導航衛星信號送入BD2-B3軟件接收機中進行解算,觀察環路改進前后接收機的跟蹤性能,如表3所示。

表2 BD2-B3模擬器參數配置Tab.2 BD2-B3 simulator configuration parameters
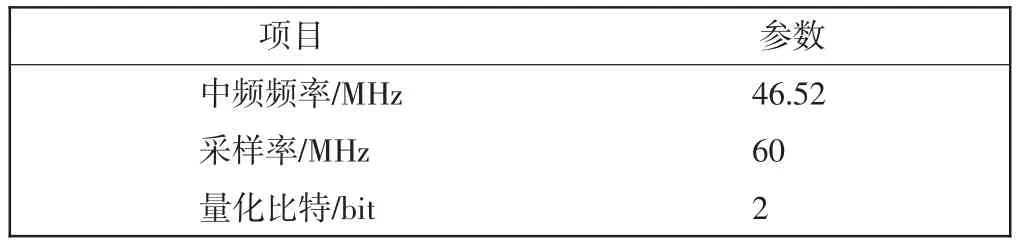
表3 BD2-B3接收機參數配置Tab.3 Parameter configuration of BD2-B3 receiver
3.2結果驗證
傳統環路與改進環路對1號(PRN = 1)衛星多普勒跟蹤結果的對比如圖5所示。可以看出,傳統環路跟蹤的載波多普勒約為1 970 Hz,并附加有周期性正弦變化的多普勒,而環路改進之后能夠明顯消除由旋轉帶來的周期性正弦變化的多普勒。
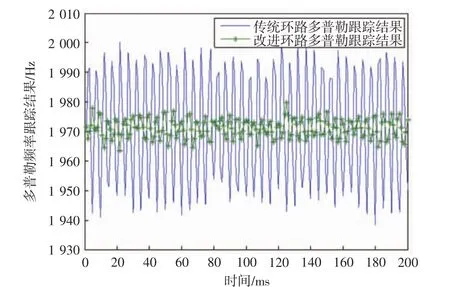
圖5 傳統環路與改進環路多普勒跟蹤結果對比Fig.5 Doppler tracking results comparison of traditional loop and improved loop
傳統環路與改進環路即時支路相關器輸出I/Q結果的對比,如圖6所示。可以看出傳統環路即時支路相關器I/Q解算沒有分開,導致接收機無法正常進入BIT同步和幀同步;改進環路即時支路相關器I路的相關積分值有一定的改善效果,Q路相關積分值有很明顯的改善效果,說明改進環路能夠正常跟蹤載體旋轉情況下的導航衛星信號。
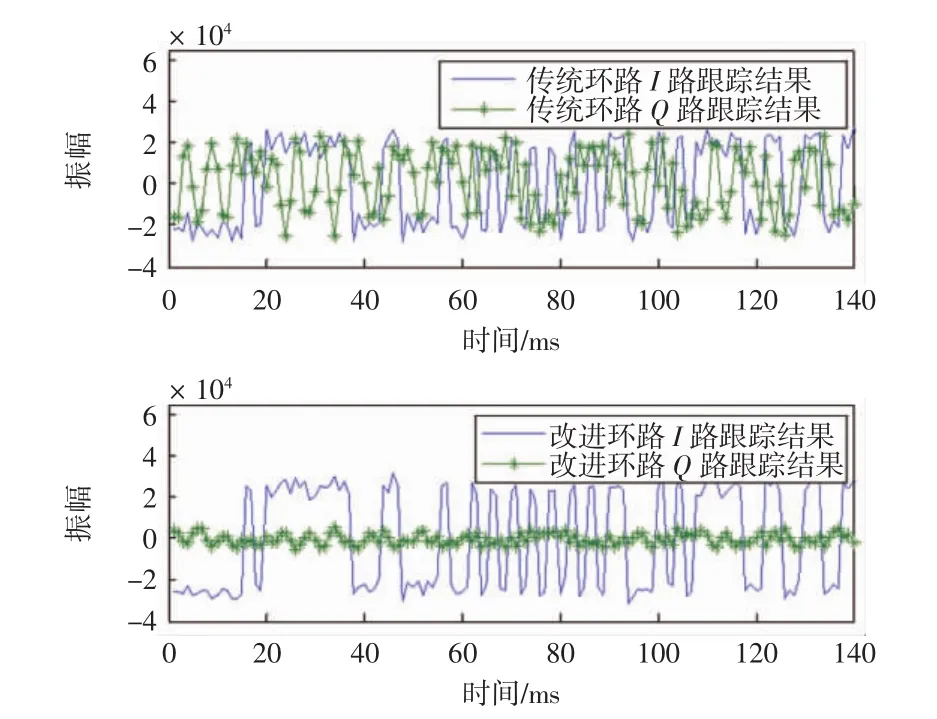
圖6 傳統環路與改進環路即時支路相關器I/Q輸出結果對比Fig.6 Real-time branch correlator I/Q output comparison of traditional loop and improved loop
4 結語
針對載體旋轉情況下,接收機接收到的導航衛星信號附加有較大的周期性正弦變化的多普勒,導致接收機無法正常跟蹤衛星的問題,提出一種新的跟蹤環路設計方案。該方案在傳統跟蹤環路結構基礎上增加一個輔助通道實時測量載體旋轉轉速,利用輔助通道獲取的轉速信息對主通道進行二次解調,以改善在載體旋轉情況下接收機對接收到的導航衛星信號的解算能力。通過軟件仿真結果表明,新的環路能夠有效降低載體旋轉帶來的不良影響,達到了預期效果。
參考文獻:
[1]GAMBLEAE,JENKINGPN.Lowcostguidanceforthemultiplelaunch rocket system(MLRS)artillery rocket[J]. Aerospace and Electronic Systems Magazine,IEEE,2001,16(1):33-39.
[2]劉建妥.旋轉炮彈的微帶天線仿真設計[D].南京:南京理工大學,2008.
[3]王猛.旋轉載體單天線GPS接收信號分析與模擬[D].北京:北京理工大學,2008.
[4]陳斌杰,陳敏鋒.高動態下GPS信號的捕獲和跟蹤技術研究[J].現代電子技術,2006(3):13-15.
[5]李耀軍,張江華,費濤,等.基于單天線GPS載波幅度的旋轉載體滾轉角測量[J].火控雷達技術,2014,43(3):6-11,16.
[6]ELLIOTT D K,CHRISTOPHER J H. Understanding GPS Principles and Applications[M]. 2nd Ed. Boston,MA:Artech House,2006.
[7]藍一帆,郭承軍,曹建蜀.導彈自旋條件下GPS信號跟蹤環路設計[J].科學技術與工程,2014,14(9):69-72.
[8]申強,王猛,李東光.旋轉條件GPS接收信號頻率和相位變化分析[J].北京理工大學學報,2009,29(1):35-37.
[9]陳躍鵬,李東光,楊士義. MIMU輔助旋轉彈丸GPS接收機跟蹤環路設計[J].中北大學學報(自然科學版),2010,31(2):173-177.
[10]于海亮,李強,羅海英,等.旋轉狀態下的GPS信號跟蹤性能[J].中國慣性技術學報,2009,17(6):723-727.
(責任編輯:黨亞茹)
Tracking loop design of anti-rotation BD receiver
HU Tieqiao,LIU Ruijie,LI Ruiqin
(Intelligent Signal and Image Processing Key Lab of Tianjin,CAUC,Tianjin 300300,China)
Abstract:In the case of carrier rotation,the navigation satellite signal received by receiver will have additional lager Doppler frequency shift,resulting in a decline in the receiver tracking performance and even failure. In order to solve this problem,a scheme is proposed to help the receiver track navigation satellite normally with rotating carrier. Based on traditional loop,the adding of auxiliary channel realizes real-time estimation of rotating speed to assist loop tracking. Simulation proves that the improved loop can effectively reduce the adverse effects caused by carrier rotation and achieve normal signal tracking.
Key words:carrier rotation;navigation satellite signal;tracking loop;doppler frequency shift
中圖分類號:TN967.1;V249
文獻標志碼:A
文章編號:1674-5590(2016)02-0015-04
收稿日期:2015-09-16;修回日期:2015-10-21
基金項目:國家自然科學基金項目(61271404,61471363);中央高校基本科研業務費專項(3122014D008)
作者簡介:胡鐵喬(1970—),男,河南洛陽人,副教授,碩士,研究方向為自適應信號處理、陣列信號處理、硬件系統的設計與實現.