基于PLC的新型模糊控制交叉口車流疏導系統*
2016-07-12 13:04:12陸大同唐淳杰
廣西民族大學學報(自然科學版) 2016年4期
陸大同,唐淳杰,楊 超
(1.百色職業學院, 廣西 百色 533000; 2.柳州城市職業學院,廣西 柳州 545036)
基于PLC的新型模糊控制交叉口車流疏導系統*
陸大同1,唐淳杰2,楊 超1
(1.百色職業學院, 廣西 百色 533000; 2.柳州城市職業學院,廣西 柳州 545036)
針對高峰期交叉路口擁堵現狀,基于PLC設計了一款新型的車流疏導系統.基于固定參數模糊控制的方法不能適應交通流非均勻分布情況,提出了一種云隨機優化的模糊控制方法,在現有交通控制系統的基本模型和框架內,給出了控制系統的軟硬件設計與實現方法,搭建了一套交叉口實時疏導系統.結果顯示,該系統有效解決了高峰期車流不平衡問題,并縮短了車輛通行的延誤時間,有效提升了交叉口的通行能力.
交通工程;PLC控制;模糊邏輯;相位控制
0 引言
隨著社會經濟發展,轎車逐漸成為普通家庭的消費產品之一,我國汽車購買量的增長速度一直處于世界領先地位,直接結果就是引起了各個地方的交通堵塞問題,特別是上下班高峰期的交叉口通信能力急劇降低.[1-2]因此,對交叉口信號燈的精確有效控制是疏導交通流的關鍵因素之一.較早的研究主要是通過建立精確的數學模型,通過收集數據信息進行相關模型參量的訓練和優化,一定程度上提供了交叉口控制方法,但是這種預先人為設定的模型,無法滿足日益增長的車流需求,并且受隨機干擾影響較大.文獻[2]首次提出了采用模糊控制的方法進行交叉口信號控制,隨后,J.Favilla、A.Machion對已有的模糊控制方法進行優化處理,并提出了相應的自適應策略.[3-4]文獻[5]在此基礎上提出了兩級模糊控制方法,并對控制的結果進行了仿真分析.文獻[6]提出了四相位模糊控制方法,進一步提升了系統的運行效率和控制精度.雖然這些研究中建立的模型和提出的分析方法在理論上為緩解交叉口交通擁擠現象提供了有效的解決思路和可行方法.但是存在兩點不足:1)這些研究多數都是基于相位固定的控制假設,但是在實際的路況中,交叉口的交通流分布往往是不均勻的,這種固定相位的控制方法一定程度上造成了空間和時間上的浪費;2)多數研究都是基于仿真進行分析,沒有給出相關可行的硬件設計思路和驗證.
筆者針對固定輸入參量模糊控制方法的缺陷,提出了一種云優化的模糊控制方法,并在現有交通控制系統的基本模型和框架內,給出了控制系統的軟硬件設計與實現方法,搭建了一套交叉口實時疏導系統.最后,針對交叉口高峰期車流平衡問題以及車輛延誤時間及通行能力進行了實驗分析.
1 控制原理分析
1.1 模糊控制實現方法
(1)
(2)
(3)
1.2 云優化模糊控制分析
模糊化的具體實現就是將輸入信號的精確數值通過模糊規則處理變成計算機可以識別的二進制信號,具體的實現方式就是通過有效的模糊隸屬度函數輸出相應的修正值.
云模型可以表示為C(Ex,En,He),根據文獻[8]的研究,相關的計算可以表示為
(4)

(5)
1.3PLC控制實現分析
基于前面的分析,PLC控制的主要目的是實現信號燈的精確延時和分析,并進行相應的程序實現的分析.根據文獻[9]的研究,可以將相應的合成輸出結果表示為
E(t)=L1(t)L2(t)R
(6)
其中,R為模糊輸出的總體邏輯關系,在實際的編程中假設通信車輛的相位長度為Li,且后續的相位車流為Li+1,同樣將其范圍設置在[0,Qmax],滿足Qmax{0,1,2,…,10},基于模糊輸出結果的基礎上獲取的車輛平均延誤時間是衡量信號控制方案優劣的重要指標.為了減少隨機噪聲引起的誤差,采用多周期平均的方法進行計算,本文周期選擇為6,基于前面的分析,根據式(5)的結果,可以將云優化后的目標函數表示為
(7)
(8)
基于云優化處理實現的控制原理如圖1所示.
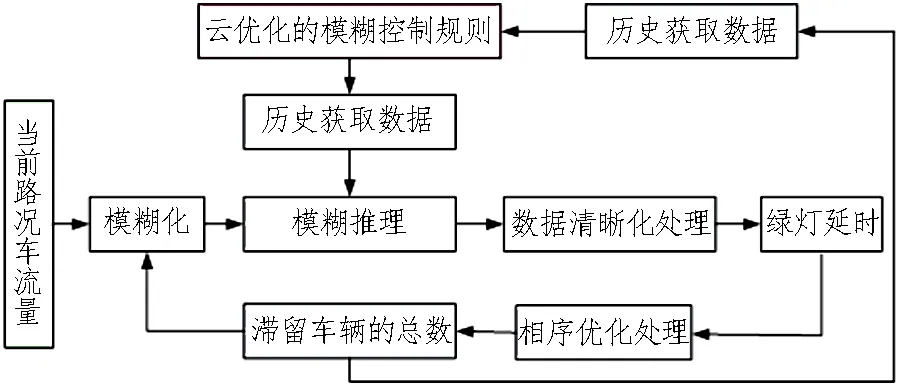
圖1 云優化的模糊控制實現原理框圖
2 系統總體設計實現
根據性能需求,疏導系統的主要結構包括PLC云優化控制機構,交通管理分析軟硬件設計、通信交換模塊.總的系統框圖如圖2所示.
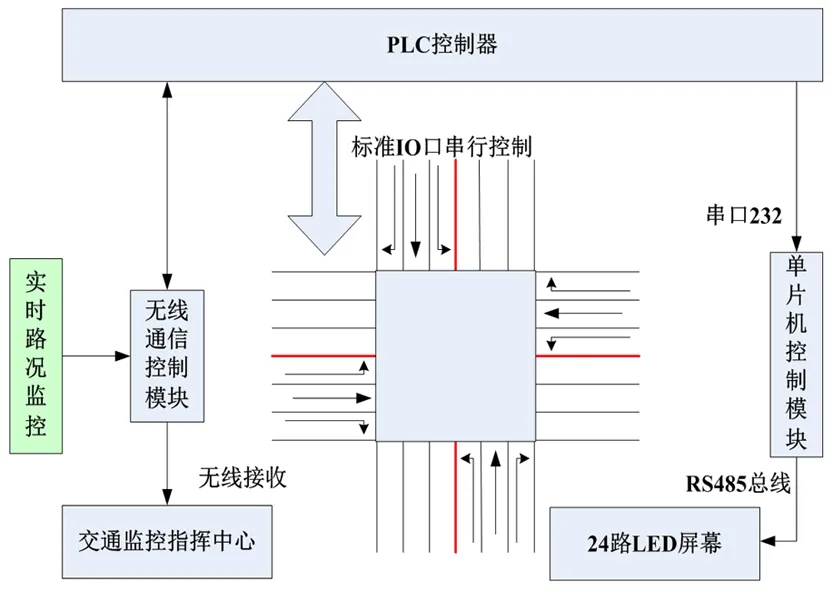
圖2 交叉口疏導系統結構框圖
圖3顯示了相應的交通流量疏導框圖.其中,具體的云優化PLC控制系統已經在第2節中進行了詳細的分析,該部分主要針對軟硬件設計以及通信模塊進行硬件設計的分析.

圖3 硬件設計的交通流量疏導方案框圖
2.1 軟件模塊設計
與PLC接口的硬件控制芯片主要是采用LQFP-44的STC125A60S2進行并聯處理,與單片機的連接主要是通過RS485進行PLC控制指令的接收.控制算法的指令設置為云模糊控制器的輸出參量,其中:Q1為主干道信號狀態R(紅)、Y(黃)、G(綠);Q2為支干道信號狀態r(紅)、y(黃)、g(綠),相應的邏輯函數分析為:[10]
2.2 通信模塊設計
通信的目的主要是監控和報警,通過監控將路口的狀態通過無線的方式進行傳遞(目前的3G和4G通信基本上都可以提供這種實時的需求),本設計主要采用4G-LTE的方式進行無線傳輸,將路口信息與PLC控制總行進行數據的實時共享.
3 實驗與分析
根據設計的系統,采用VISSIM仿真軟件和PLC控制單元結合進行實際的系統仿真,并基于C語言設計了相應的控制程序.用于實驗分析一段交叉路口的實際數據性質如表1所示.實驗中將本文方法同文獻[6]的方法進行了綜合比較.
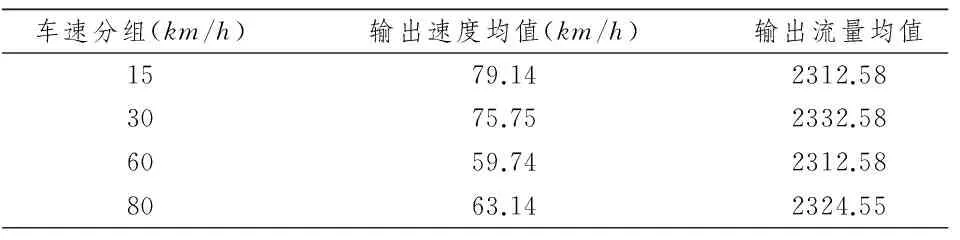
表1 實驗輸入及輸出值
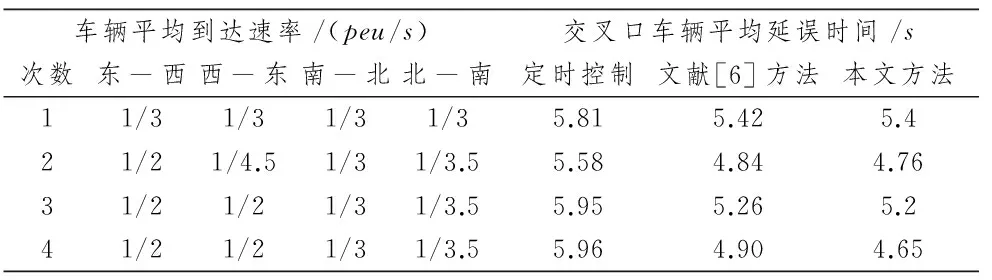
從圖4中的擬合曲線可以看出,車速大小對流量的影響較小,本文通過云優化處理以后,處理車輛的通行能力有一定程度的提升,整個通行過程與車速本身的關系并不明顯.四個方向的整體通行能力實驗分析的結果如表2所示,基于本文設計系統的交叉口平均車輛延誤時間有所改善.
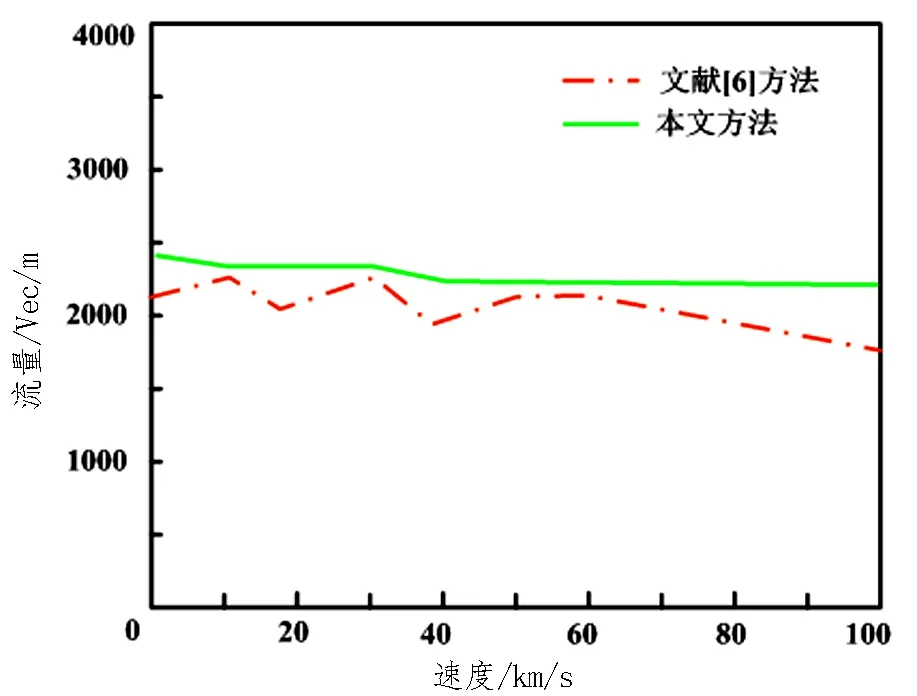
圖4 實驗分析擬合曲線
表2 幾種延誤時間的控制比較
Tab.2ComparisonofSeveralDelayTimeControl
車輛平均到達速率/(peu/s)交叉口車輛平均延誤時間/s次數東-西西-東南-北北-南定時控制文獻[6]方法本文方法11/31/31/31/35.815.425.421/21/4.51/31/3.55.584.844.7631/21/21/31/3.55.955.265.241/21/21/31/3.55.964.904.65
通過整個系統的測試結果可以看出,在交叉口出現加大的車輛流動的時候,本文方法的延誤時間最短,整體提升了近10%.但是本系統的最大的優點是基于現有的交通控制平臺的升級,因此,具有一定的應用價值,能夠在當前情況下緩解道路交叉口的交通壓力.
4 結論
針對交叉口高峰期通行車流量情況下的車輛疏導控制系統進行研究,提出了一種基于PLC控制的新型車輛疏導系統.采用一種云隨機模糊優化控制參數的方法,在現有交通控制系統的基本模型和框架內,給出了控制系統的軟硬件設計與實現方法,搭建了一套交叉口實時疏導系統.最后的結果顯示,本文方法能夠有效緩解高峰期車流不平衡問題,并有效縮短通行時間.針對目前社會交通擁堵嚴重的情況,具有較好的應用價值.
[1] J Favilla, A Machion, F Gomidel. Fuzzy Traffic Control : Adaptive Strategies[J]. Fuzzy Systems, Second,1993,28: 506-511.
[2] 陳森發,陳洪,徐吉謙.城市單路口交通的兩級模糊控制及其仿真[J]. 系統仿真學報,1998,4:35-40.
[3] Jarkko Niittymaki, Ville Kononen. Traffic Signal Controller Based On Fuzzy Logic[C]. Systems, Man, and Cybernetics, IEEE International Conference, 2000,5:3578-3581.
[4] 徐良杰,王煒.信號交叉口行人過街時間模型研究[J]. 交通運輸工程學報,2005 (1):111-115.
[5] 徐良杰,王煒,俞斌.信號交叉口非機動車及行人交通控制研究[J].交通工程信息學報,2004(6):102-108.
[6] AlOKaisy A F, Stewart J. A New approach for developing warrants of protected left-turn phase at signalized intersections[J]. Transportation Re2search Part A : Policy and Practice, 2011, 35(6):561-574.
[7] Leden Larsa1Pedestrian risk decrease with pedestrian flow1A case study based on data from signalized intersections in Hamilton Ontario[J]. Accident Analysis and Prevention, 2012, 34(4):457-464.
[8] 畢曉君,劉國安.基于云差分計劃算法的約束多目標優化實現[J].哈爾濱工程大學學報,2012,33(8):1-7.
[9] 韓強,劉治平,劉家壯.城市交叉口智能控制系統的研究[J].系統工程,2014 (6):83-86.
[10] 王玉嬌,李長城.基于3G通訊和PLC的交通信號控制[J].公路交通科技,2014,31(6):138-142.
[責任編輯 蘇 琴]
[責任校對 黃祖賓]
New Fuzzy Control Intersection Traffic Flow Guidance System based on PLC
LU Da-tong1,TANG Chun-jie2,YANG Chao1
(1.BaiseVocationalandTechnicalCollege,Baise533000,China;2.LiuzhouCityVocationalCollege,Liuzhou545036,China)
In view of current situation of peak intersection congestion, this paper designs a new type of traffic flow guidance system based on PLC. In order to solve the problem of fixed parameters of fuzzy control method based on non-uniform distribution can not adapt to traffic flow, this paper proposes a cloud random optimization method of fuzzy control in the existing within the framework of the basic model and traffic control system, gives the hardware and software of the control system design and realization method of real-time guidance system to build a set of intersection. Results showed that the system effectively solve the rush hour traffic imbalance, and traffic delay time is shortened, effectively improve the traffic capacity of intersection.
traffic engineering; PLC control; Fuzzy logic; Phase control
2016-09-20.
廣西教育廳科研課題 (KY2016YB 778);廣西教育廳科研課題(KY2016YB779).
陸大同(1969-),男,百色職業學院副教授,研究方向:電工電子技術、機電一體化. 通信作者:唐淳杰(1978-),男,碩士,柳州城市職業學院副教授,研究方向:計算機應用技術.
U491.5
A
1673-8462(2016)04-0077-04
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56