基于以太網(wǎng)和CAN總線的液壓支架電液控制系統(tǒng)研究
2016-07-20 11:13:38汪佳彪王忠賓李付生
煤炭學(xué)報 2016年6期
汪佳彪,王忠賓,張 霖,2,許 靜,李付生
(1.中國礦業(yè)大學(xué)機電工程學(xué)院,江蘇 徐州 221116;2.加州大學(xué)圣迭戈分校神經(jīng)計算研究所,美國加利福尼亞州 92093;3.中平能化集團天工機械制造有限公司,河南平頂山 467000)
?
基于以太網(wǎng)和CAN總線的液壓支架電液控制系統(tǒng)研究
汪佳彪1,王忠賓1,張霖1,2,許靜1,李付生3
(1.中國礦業(yè)大學(xué)機電工程學(xué)院,江蘇 徐州221116;2.加州大學(xué)圣迭戈分校神經(jīng)計算研究所,美國加利福尼亞州92093;3.中平能化集團天工機械制造有限公司,河南平頂山467000)
摘要:針對目前綜采工作面液壓支架電液控制系統(tǒng)的實時性差、可靠性低的問題,提出一種基于以太網(wǎng)和CAN總線的液壓支架電液控制系統(tǒng),構(gòu)建了系統(tǒng)的整體架構(gòu),實現(xiàn)了總體程序。根據(jù)實際的工況對系統(tǒng)進行改進:分析了液壓支架遠程監(jiān)控的工作特性,采用基于改進時分復(fù)用算法的TCP/IP通訊協(xié)議,從理論計算了工作面所有支架發(fā)送完成一次傳感數(shù)據(jù)時間為260 ms,達到了遠程監(jiān)控實時性的要求;分析了液壓支架鄰架控制,采用基于動態(tài)優(yōu)先級提升算法的CAN通訊協(xié)議,減少因總線碰撞而造成的系統(tǒng)實時性降低;控制系統(tǒng)的以太網(wǎng)與CAN總線可冗余通信,以提高系統(tǒng)通信可靠性。通過實驗驗證了支架控制器的通訊功能以及2種通訊方式的可替換性,證明了該系統(tǒng)具有較高的實時性和可靠性。
關(guān)鍵詞:電液控制;液壓支架;以太網(wǎng);CAN總線
汪佳彪,王忠賓,張霖,等.基于以太網(wǎng)和CAN總線的液壓支架電液控制系統(tǒng)研究[J].煤炭學(xué)報,2016,41(6):1575-1581.doi: 10.13225/j.cnki.jccs.2016.0504
Wang Jiabiao,Wang Zhongbin,Zhang Lin,et al.Research on electro-hydraulic control system of hydraulic support based on Ethernet and CAN-Bus[J].Journal of China Coal Society,2016,41(6):1575-1581.doi:10.13225/j.cnki.jccs.2016.0504
液壓支架是綜采工作面“三機”配套設(shè)備中保證井下工作面安全的重要設(shè)備[1-2]。液壓支架的核心為支架電液控制系統(tǒng),電液控制系統(tǒng)性能好壞是制約液壓支架可靠性和實用性的關(guān)鍵部分[3-5]。
近年來,在國際市場上占據(jù)領(lǐng)先地位的液壓支架電液控制系統(tǒng)主要有德國DBT公司開發(fā)的PM4電液控制系統(tǒng)、MARCO公司開發(fā)的PM31和PM32電液控制系統(tǒng)以及美國JOY公司研制的RS20型電液控制系統(tǒng)[6-7]。國內(nèi)支架電液控制系統(tǒng)的生產(chǎn)研發(fā)企業(yè)有北京天地瑪珂電液控制系統(tǒng)有限公司,四川神坤裝備有限公司,廣州日濱科技發(fā)展有限公司,鄭州煤礦機械集團股份有限公司,其中天瑪公司占國產(chǎn)液壓支架電液控制系統(tǒng)市場銷量的70%[8]。然而進口支架電液控制系統(tǒng)存在價格高、供貨不及時、通訊協(xié)議不公開、升級困難,不具備自動控制和自診斷功能等問題[9-10];國產(chǎn)支架電液控制系統(tǒng)起步晚,功能少,穩(wěn)定性不好。這嚴(yán)重阻礙了我國煤礦工作面現(xiàn)代化的發(fā)展。
隨著煤礦綜采工作面不斷朝著智能化、無人化方向發(fā)展。支架電液控制系統(tǒng)不僅需要監(jiān)測支架狀態(tài)、成組控制、巷道控制,更應(yīng)實現(xiàn)地面控制中心對支架進行直接交互通訊、遠程升級維護等功能。這就需要支架與上位機、支架與支架之間的通訊具有更高的速率、穩(wěn)定性和可靠性。因此本文采用以太網(wǎng)實現(xiàn)支架與上位機進行通訊,并根據(jù)實際工況對時分復(fù)用算法進行修改,以減少總線的競爭,提高上位機對處理緊急信息的響應(yīng)速度。采用CAN總線實現(xiàn)支架間的通訊,采用動態(tài)優(yōu)先級提升的方法,保證通訊的實時性和穩(wěn)定性。且兩種通訊方式可相互替代,增加了支架電液控制系統(tǒng)的冗余性,保證煤礦工作面的安全高效生產(chǎn)。
1 電液控制系統(tǒng)總體設(shè)計
液壓支架作為綜采工作面的安全保障,為采煤機割煤提供安全的工作空間。液壓支架電液控制系統(tǒng)具有本架控制、鄰架控制、成組控制、自動跟機、遠程監(jiān)控等功能[11-12]。
1.1控制系統(tǒng)硬件設(shè)計
液壓支架控制系統(tǒng)主要由支架控制器、操作面板、電液換向閥、位移傳感器、壓力傳感器、傾角傳感器、紅外線傳感器、本安電源等硬件組成,硬件連接如圖1所示。支架控制器是電液控制系統(tǒng)的核心部分,負責(zé)處理、發(fā)送和接收操作面板的指令、傳感器信息、遠程控制信息、鄰架操作信息等;操作面板是電液控制系統(tǒng)的顯示和操作部分,負責(zé)顯示支架的信息以及控制支架進行本架、鄰架以及成組的操作;壓力傳感器通過測量立柱的壓力,用以監(jiān)測支架的支護狀態(tài);位移傳感器通過測量支架推移油缸的位移,監(jiān)測支架的推移情況;紅外線接收器通過接收采煤機發(fā)射的紅外信號,判斷采煤機的當(dāng)前運行位置,實現(xiàn)支架自動跟機操作;傾角傳感器通過實時檢測支架的底座、后連桿、掩護梁、頂梁的傾角,從而得到支架的當(dāng)前姿態(tài)[13-16]。支架控制系統(tǒng)結(jié)構(gòu)如圖2所示。

圖1 支架控制系統(tǒng)硬件連接Fig.1 Hardware connection of electro-hydraulic control system

圖2 支架控制系統(tǒng)結(jié)構(gòu)Fig.2 Structure of electro-hydraulic control system
1.2控制系統(tǒng)軟件設(shè)計
支架電液控制系統(tǒng)具有本地控制、遠程監(jiān)控兩種模式。本地控制通過操作面板輸入控制命令,進行本架控制、鄰架控制、成組控制、自動跟機等操作。遠程監(jiān)控由支架控制器通過以太網(wǎng)接口實時發(fā)送傳感器的數(shù)據(jù)至地面控制中心,并且接收地面控制中心的操作命令進行動作。
操作面板的功能:通過識別按鍵,向支架控制器發(fā)送對應(yīng)的操作命令并在顯示器上顯示,程序流程如圖3(a)所示;支架控制器的功能:通過RS485總線、CAN總線、以太網(wǎng)接收和發(fā)送傳感器信息及控制命令,程序流程如圖3(b)所示。

圖3 程序流程Fig.3 Program flow chart
2 通信系統(tǒng)設(shè)計
2.1以太網(wǎng)通信設(shè)計
設(shè)計的液壓支架控制器通過以太網(wǎng)接口實現(xiàn)支架與地面控制中心的實時遠程監(jiān)控。此外當(dāng)支架控制器的CAN總線出現(xiàn)故障時,可將鄰架控制信息通過以太網(wǎng)發(fā)送到被控架上,從而提高支架操作的可靠性。編寫 TCP/IP通訊程序,通過循環(huán)執(zhí)行MonitorEventLoop()函數(shù)實現(xiàn),程序的控制流程如圖4所示。

圖4 以太網(wǎng)程序流程Fig.4 Program flow chart of Ethernet
W5100為一款高性價比的多功能網(wǎng)絡(luò)接口芯片,它可以在沒有操作系統(tǒng)的單片機中實現(xiàn)Internet連接,且其 TCP/IP協(xié)議棧、以太網(wǎng)介質(zhì)傳輸層(MAC)和物理層(PHY)成熟、穩(wěn)定、可靠,W5100內(nèi)部還集成有可用于數(shù)據(jù)傳輸緩存的16 kB存儲器。因此采用其作為以太網(wǎng)的控制芯片,并通過SPI總線實現(xiàn)與STM32F103ZET6芯片的連接,可實現(xiàn)10 Mbps的傳輸速度。
2.2TCP/IP協(xié)議設(shè)計
支架控制器通過以太網(wǎng)發(fā)送給地面控制中心的有兩類信息,一類是周期性信息,為各類傳感器數(shù)據(jù);另一類是非周期性信息,包括支架的動作狀態(tài)和故障信息。對于周期性的數(shù)據(jù),只要能在規(guī)定的時間內(nèi)發(fā)送并被上位機接收到即可;對于支架的動作以及故障這類非周期性信息,希望它能盡快的被地面控制中心接收。
根據(jù)井下支架的布置以及標(biāo)準(zhǔn)以太網(wǎng)雙絞線傳輸距離的限制,以20臺支架為單位通過雙絞線連接到一臺交換機中,然后將交換機的信號通過光纖轉(zhuǎn)換器轉(zhuǎn)換為光纖信號后通過光纖連接到光纖交換機中,最后通過光纖將信號傳輸?shù)降孛婵刂浦行摹8髦Ъ芸刂破骷吧衔粰C組成一個星型的網(wǎng)絡(luò)結(jié)構(gòu)。其硬件連接如圖5所示。

圖5 以太網(wǎng)硬件連接Fig.5 Hardware connection of Ethernet
使用的以太網(wǎng)屬于標(biāo)準(zhǔn)以太網(wǎng),具有10 Mbps的傳輸速度,使用的是帶有沖突檢測的載波偵聽多路訪問(CSMA/CD)的訪問控制方法。因此當(dāng)工作面的支架同時向地面控制中心發(fā)送傳感器數(shù)據(jù)時,則會導(dǎo)致總線出現(xiàn)碰撞競爭,由于這些周期性數(shù)據(jù)是連續(xù)發(fā)送的,因此總線會一直出現(xiàn)碰撞競爭的現(xiàn)象,不僅加重總線的負擔(dān),還會導(dǎo)致有些數(shù)據(jù)一直無法傳送,使系統(tǒng)的實時性降低,因此提出使用時分復(fù)用的方法對協(xié)議進行改進[17-18]。傳感器的數(shù)據(jù)屬于周期性數(shù)據(jù),假設(shè)傳感器數(shù)據(jù)量為100個字節(jié),工作面有200臺支架,TCP/IP的通訊速度為10 Mbps,那么每個傳感器發(fā)送數(shù)據(jù)的時間約為0.8 ms,所有支架發(fā)送完一次傳感器數(shù)據(jù)時間為160 ms,完全能滿足工作面實時性的要求,因此對于周期性信息采用時分復(fù)用的方法能消除總線碰撞的現(xiàn)象,提高工作面的實時性;但支架動作信息、故障信息等這類非周期性數(shù)據(jù)不能及時上傳。因此僅使用普通的時分復(fù)用方法就會出現(xiàn)最后的支架不能及時發(fā)送非周期性數(shù)據(jù),最遲需要159.2 ms后才能發(fā)送,這并不符合控制系統(tǒng)實時性的要求,因此對時分復(fù)用方法進行改進,考慮到非周期性數(shù)據(jù)的數(shù)據(jù)量比較少,因此在每次發(fā)送周期信息之前設(shè)有0.5 ms的時間為非周期信息的窗口期,用于各支架發(fā)送動作信息、故障信息等非實時性數(shù)據(jù),這樣非周期性信息最遲只需1.3 ms后就可發(fā)送。采用這種方法所有的支架發(fā)送完成一次傳感器數(shù)據(jù)時間為260 ms,完全滿足系統(tǒng)實時性要求。具體流程如圖6所示。

圖6 改進的時分復(fù)用方法Fig.6 Improve of TDM algorithm
2.3CAN總線通信設(shè)計
支架控制器通過CAN總線實現(xiàn)支架的本地操作,具體操作內(nèi)容包括:鄰架控制、成組控制等功能,此外當(dāng)控制器的以太網(wǎng)傳輸出現(xiàn)故障時,可以由CAN總線發(fā)送遠程控制命令,從而提高支架監(jiān)控的可靠性。編寫CAN通訊程序,通過循環(huán)執(zhí)行ControlEventParser()函數(shù)實現(xiàn),程序流程如圖7所示。

圖7CAN總線程序流程Fig.7 Program flow chart of CAN-Bus
支架控制器 STM32F103ZET6芯片集成兩路CAN總線接口和CAN通訊協(xié)議,因此不需要外接CAN控制器,只需要設(shè)計外圍電路即可進行通訊,為了保證CAN總線在井下通訊時防止電磁干擾造車通訊異常等問題,使用ADM3053對CAN總線的通訊進行隔離保護。
2.4CAN協(xié)議設(shè)計
設(shè)計的液壓支架電液控制系統(tǒng)中由CAN總線發(fā)送的控制命令有鄰架控制、成組控制、急停閉鎖控制以及遠程控制。遠程控制是指當(dāng)支架電液控制系統(tǒng)的以太網(wǎng)總線出現(xiàn)問題時,由別的支架控制器通過CAN總線發(fā)送遠程控制命令。這些命令都是非周期性命令,其優(yōu)先級高低依次為急停閉鎖控制、鄰架控制、成組控制以及遠程控制。
CAN總線采用了多主競爭式總線結(jié)構(gòu),采用CAN采用非破壞總線仲裁技術(shù),即波監(jiān)聽多路訪問/避免碰撞(CSMA/CA)的介質(zhì)訪問控制方式,具有多主站運行和分散仲裁的串行總線以及廣播通信的特點。CAN總線上任意節(jié)點可在任意時刻主動地向網(wǎng)絡(luò)上其他節(jié)點發(fā)送信息而不分主次,因此可在各節(jié)點之間實現(xiàn)自由通信[19-20]。CAN總線以報文為單位進行數(shù)據(jù)傳送,報文的優(yōu)先級結(jié)合在11位標(biāo)識符中,具有最低二進制數(shù)的標(biāo)識符有最高的優(yōu)先級。如果同一時間內(nèi)工作面上有多個工人同時對支架進行鄰架以及成組操作,會出現(xiàn)多個節(jié)點同時向總線發(fā)送控制信息,造成總線碰撞擁堵。一旦總線中的控制命令出現(xiàn)碰撞,就按控制信息的優(yōu)先級高低進行排序發(fā)送,優(yōu)先級低的信息會不斷延遲發(fā)送,降低系統(tǒng)的實時性。
采煤機運行后方的液壓支架需要其盡快的進行采空區(qū)支護以保證工作面的安全,因此希望其有較高的優(yōu)先級,距離采煤機越遠其優(yōu)先級越高,而在采煤機運行前方的支架則是需要距離采煤機越近優(yōu)先級越高,因此對CAN協(xié)議中的11位優(yōu)先級標(biāo)識符重新設(shè)計,將其分成兩部分,第1部分表示控制指令的優(yōu)先級,另一部分根據(jù)采煤機運行方向來確定支架節(jié)點的編號,沿著采煤運行的方向?qū)χЪ軓?開始編號。但采用此方法,優(yōu)先級最低的信息在總線的競爭中仍然會不斷的延后,降低系統(tǒng)的實時性。因此引入動態(tài)優(yōu)先級提升的算法[21-22],根據(jù)節(jié)點信息仲裁失敗的次數(shù)動態(tài)提升其優(yōu)先級。標(biāo)識符見表1。

表1CAN協(xié)議標(biāo)識符Table 1 Tag of CAN protocol
為保證工作面的安全,急停閉鎖控制指令的優(yōu)先級是最高的,因此在優(yōu)先級提升的過程中,其余指令優(yōu)先級不能超過急停閉鎖的優(yōu)先級。設(shè)計對應(yīng)的提升算法,0為最高的優(yōu)先級,7為最低的優(yōu)先級,若當(dāng)前指令的初始優(yōu)先級為a,其碰撞的失敗次數(shù)為n,則其提升的優(yōu)先級為

其中a必須大于等于1。若控制信息在預(yù)定時間內(nèi)仍未發(fā)送成功,則直接提升其優(yōu)先級為1。控制流程如圖8所示。
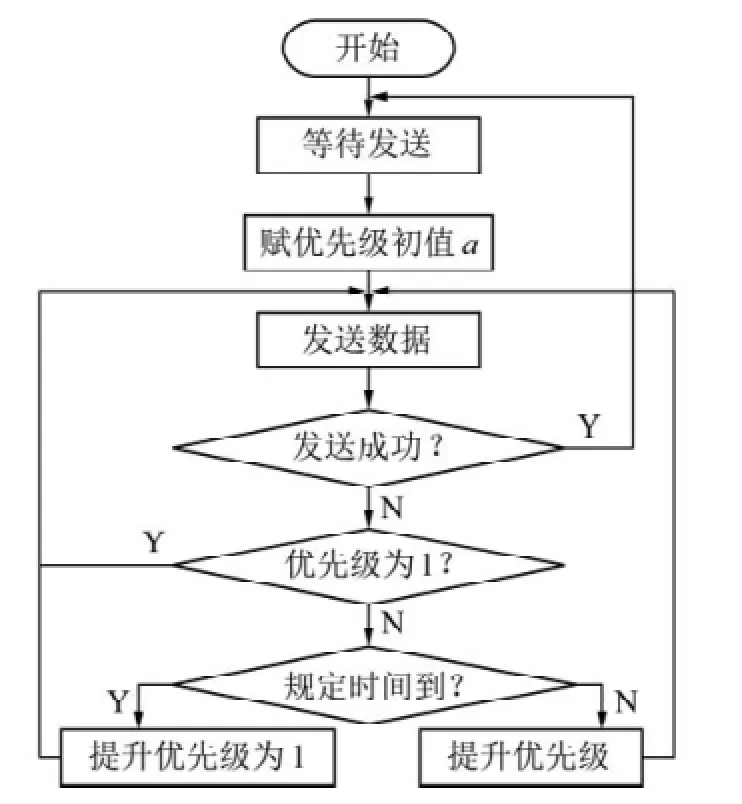
圖8 動態(tài)優(yōu)先級提升算法流程Fig.8 Program flow chart of priority promotion dynamic scheduling algorithm
3 通訊實驗
3.1TCP通訊實驗
為驗證設(shè)計的支架電液控制系統(tǒng)的以太網(wǎng)通訊功能是否符合實際工況需求,設(shè)計如下實驗,實驗1:支架控制器定時向上位機發(fā)送數(shù)據(jù);實驗2:上位機向支架控制器發(fā)送控制命令。為驗證上述實驗,控制面板通過RS485串口與支架控制器進行連接,支架控制器通過以太網(wǎng)接口與無線路由器連接,無線路由器通過無線網(wǎng)與上位機連接,設(shè)置上位機的IP地址為192.168.1.118,端口為8087;支架控制器的IP地址為192.168.1.30,端口為49166。硬件連接如圖9所示。

圖9 TCP通訊實驗硬件連接Fig.9 Hardware connection of TCP communication experiment
實驗1通過編寫程序使支架控制器定時向上位機發(fā)送代碼,實驗結(jié)果如圖10(a)所示;實驗2通過上位機向支架控制器發(fā)送控制命令,支架控制器在接收到控制命令后在控制面板顯示對應(yīng)的信息,實驗結(jié)果如圖10(b)所示。

圖10 TCP通訊實驗Fig.10 Experiment of TCP communication
實驗結(jié)果表明,上位機能正常的對支架控制器進行遠程監(jiān)控,滿足設(shè)計要求。
3.2CAN總線通訊實驗
為驗證設(shè)計的支架電液控制系統(tǒng)的CAN總線通訊功能是否符合實際工況需求,設(shè)計如下實驗,實驗1:支架控制器1通過CAN總線控制支架控制器2,并將控制結(jié)果在液晶顯示器上顯示;實驗2:上位機通過支架控制器1來控制支架控制器2。為驗證上述實驗,控制面板1,2通過RS485串口分別與支架控制器1,2連接,支架控制器1,2通過CAN總線端口相互連接,另外,支架控制器1通過以太網(wǎng)與無線路由器連接,路由器通過無線網(wǎng)與上位機連接,硬件連接如圖11所示。

圖11CAN總線實驗硬件連接Fig.11 Hardware connection of CAN-Bus experiment
實驗1,通過控制面板1向支架控制器2發(fā)送控制命令并在控制面板2上顯示對應(yīng)的控制信息,實驗結(jié)果如圖12(a)所示。實驗2上位機通過支架控制器1向支架控制器2發(fā)送遠程控制指令并顯示,實驗結(jié)果如圖12(b)所示。
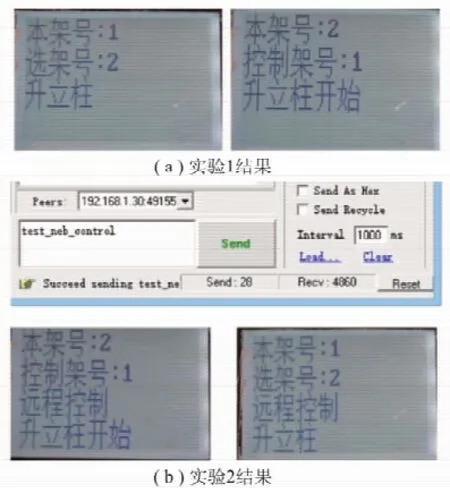
圖12CAN總線通訊實驗Fig.12 Experiment of CAN-Bus communication
實驗結(jié)果表明,支架控制器通過CAN總線能準(zhǔn)確控制鄰架,且可通過別的支架控制器通過CAN總線進行遠程操控,確保支架控制系統(tǒng)的安全穩(wěn)定。
4 總 結(jié)
(1)支架控制器能夠獨立、互不干擾、及時的完成各項基本的通訊以及操作功能。
(2)支架控制器的以太網(wǎng)通訊以及CAN總線通訊能夠相互替代,提高了系統(tǒng)的冗余性和可靠性。
(3)通過使用以太網(wǎng)作為支架與上位機的通訊方式,使得工作面所有支架完成一次數(shù)據(jù)上傳至地面控制中心的時間為260 ms,大大提高了系統(tǒng)的實時性。
參考文獻:
[1] 王國法.工作面支護與液壓支架技術(shù)理論體系[J].煤炭學(xué)報,2014,39(8):1593-1601.Wang Guofa.Theory system of working face support system and hydraulic roof support technology[J].Journal of China Coal Society,2014,39(8):1593-1601.
[2]Wu Juan.The finite element modeling of spiral ropes[J].International Journal of Coal Science&Technology,2014,1(3):346-355.
[3] 李磊,宋建成,田慕琴,等.基于DSP和RS485總線的液壓支架電液控制通信系統(tǒng)的設(shè)計[J].煤炭學(xué)報,2010,35(4):701-704.Li Lei,Song Jiancheng,Tian Muqin,et al.Design of the communication for electro-hydraulic control system of hydraulic support based on DSP and RS485 buses[J].Journal of China Coal Society,2010,35(4):701-704.
[4]林福嚴(yán),韋成龍,陶顯,等.基于RS485總線和實時數(shù)據(jù)庫的液壓支架遠程控制系統(tǒng)通信設(shè)計[J].煤炭工程,2015(1):25-27.Lin Fuyan,Wei Chenglong,Tao Xian,et al.Communication design of remote control system for hydraulic support based on RS485 bus and real-time database[J].Coal Engineering,2015(1):25-27.
[5]Wang Jinhua.Development and prospect on fully mechanized mining in Chinese coal mines[J].International Journal of Coal Science&Technology,2014,1(3):253-260.
[6]Wang B,Guan Z,Cha M.Research on the control system of hydraulic support based on CAN bus[J].Energy Procedia,2011,11: 1923-1928.
[7]郭衛(wèi),李績.PLC在礦用液壓支架電液控制系統(tǒng)中的應(yīng)用研究[J].煤礦機械,2015,36(1):3-5.Guo Wei,Li Ji.PLC application in mining hydraulic support electro-hydraulic control system research[J].Coal Mine Machinery,2015,36(1):3-5.
[8]馬鵬宇,余佳鑫,陸廷鍇,等.國產(chǎn)液壓支架電液控制系統(tǒng)現(xiàn)狀[J].中國機械,2013(11):211-212.Ma Pengyu,Yu Jiaxin,Lu Tingkai,et al.Status of domestic electronic-hydraulic control[J].Machine China,2013(11):211-212.
[9]申寶宏,郭玉輝.我國綜合機械化采煤技術(shù)裝備發(fā)展現(xiàn)狀與趨勢[J].煤炭科學(xué)技術(shù),2012,40(2):1-3,44.Shen Baohong,Guo Yuhui.Development status and tendency of technology and equipment for fully mechanized coal mining in China [J].Coal Science and Technology,2012,40(2):1-3,44.
[10]李首濱.國產(chǎn)液壓支架電液控制系統(tǒng)技術(shù)現(xiàn)狀[J].煤炭科學(xué)技術(shù),2010,38(1):53-56.Li Shoubin.Technical status of domestic electronic-hydraulic control system for hydraulic powered support[J].Coal Science and Technology,2010,38(1):53-56.
[11]陶顯,林福嚴(yán),張曉青,等.液壓支架電液控制系統(tǒng)跟機自動化技術(shù)研究[J].煤炭科學(xué)技術(shù),2012,40(12):84-87.Tao Xian,Lin Fuyan,Zhang Xiaoqing,et al.Study on automatic following technology of electric and hydraulic control system applied in hydraulic powered support[J].Coal Science and Technology,2012,40(12):84-87.
[12]許靜,王忠賓,范禎科.基于Ethernet的綜采工作面液壓支架遠程監(jiān)控系統(tǒng)研究[J].制造業(yè)自動化,2014(6):38-41.Xu Jing,Wang Zhongbin,F(xiàn)an Zhenke.Study on the Ethernet-based remote monitoring system for hydraulic supports in full-mechanized mining face[J].Manufacturing Automation,2014(6):38-41.
[13]楊世華,宋建成,田幕琴,等.基于雙RS485總線的液壓支架運行狀態(tài)監(jiān)測系統(tǒng)開發(fā)[J].工礦自動化,2014,40(8):1-5.Yang Shihua,Song Jiancheng,Tian Muqin,et al.Development of running status monitoring system for hydraulic support based on dual RS485 buses[J].Industry and Mine Automation,2014,40(8): 1-5.
[14]Cheng Wangjun,Chi Chengzhong,Wang Yongzhen.Volume calculation of the spur gear billet for cold precision forging with average circle method[J].International Journal of Coal Science&Technology,2014,1(4):456-462.
[15]寧宇.綜采工作面液壓支架電液控制系統(tǒng)設(shè)計[J].煤炭科學(xué)技術(shù),2009,37(1):1-3.Ning Yu.Design on electric and hydraulic control system of hydraulic powered support for fully mechanized longwall mining face[J].Coal Science and Technology,2009,37(1):1-3.
[16]Wen M,Lü M,Pan Y,et al.Study on mining technology in intelligent workface of Wannian Colliery[A].Intelligent Systems.IEEE [C].2010:271-274.
[17]Wang Zheng,Pu Geguang,Li Jiangwen,et al.A novel requirement analysis approach for periodic control systems[J].Frontiers of Computer Science,2013,7(2):214-235.
[18]Mahloo M,Chen J,Wosinska L,et al.Toward reliable hybrid WDM/TDM passive optical networks[J].IEEE Communications Magazine,2014,52(2):S14-S23.
[19]田靜,黃亞樓,王立文,等.CAN總線固定優(yōu)先級調(diào)度算法的應(yīng)用[J].計算機工程,2006,32(23):94-96.Tian Jing,Huang Yalou,Wang Liwen,et al.Application of fixed priority schedule algorithm in CAN Bus[J].Computer Engineering,2006,32(23):94-96.
[20]Pan C,Guo J,Zhu L,et al.Modeling and verification of CAN Bus with application layer using UPPAAL[J].Electronic Notes in Theoretical Computer Science,2014,309(12):345-360.
[21]曹潔,曾國蓀,姜火文,等.云環(huán)境下服務(wù)信任感知的可信動態(tài)級調(diào)度方法[J].通信學(xué)報,2014,35(11):39-49.Cao Jie,Zeng Guosun,Jiang Huowen,et al.Trust-aware dynamic level scheduling algorithm in cloud environment[J].Journal on Communications,2014,35(11):39-49.
[22]楊捷,姚曉東,鄭海珍.CAN總線中非周期信息的隨機動態(tài)優(yōu)先級調(diào)度[J].電子技術(shù)應(yīng)用,2007,33(2):18-20.Yang Jie,Yao Xiaodong,Zheng Haizhen.Dynamic priority scheduling of aperiodic message on CAN[J].Application of Electronic Technique,2007,33(2):18-20.
中圖分類號:TD655;TD355
文獻標(biāo)志碼:A
文章編號:0253-9993(2016)06-1575-07
收稿日期:2016-04-22修回日期:2016-05-05責(zé)任編輯:許書閣
基金項目:國家重點基礎(chǔ)研究發(fā)展計劃(973)資助項目(2014CB046300);國家自然科學(xué)基金聯(lián)合基金資助項目(U1510117)
作者簡介:汪佳彪(1992—),男,浙江紹興人,碩士研究生。E-mail:wangjiabiao_cumt@163.com。通訊作者:王忠賓(1972—),男,安徽蕭縣人,教授,博士生導(dǎo)師。Tel:0516-83590758,E-mail:wangzbpaper@126.com
Research on electro-hydraulic control system of hydraulic support based on Ethernet and CAN-Bus
WANG Jia-biao1,WANG Zhong-bin1,ZHANG Lin1,2,XU Jing1,LI Fu-sheng3
(1.School of Mechatronic Engineering,China University of Mining and Technology,Xuzhou221116,China;2.Institute for Neural Computation,University of California,San Diego(UCSD),California92093,USA;3.Zhongping Energy Chemical Group Tiangong Machinery Manufacturing Co.,Ltd.,Pingdingshan 467000,China)
Abstract:Based on the low reliability and real-time performance of current hydraulic support remote control system,a novel control system was proposed to combine Ethernet and CAN-bus,the system architecture was built and the program was implemented.According to the actual working condition,some improvements were achieved.The characteristics of hydraulic support control system was analyzed,and the TCP/IP communication protocol based on improved TDM was tested for estimating the theoretical loop time(260 ms),which satisfied the communication requirement.The local control characteristics of hydraulic support were analyzed,the CAN-Bus communication based on dynamic priority algorithm was designed for reducing communication conflicts and low reliability.By combining TCP/IP and CAN-Bus,the redundant-ability and reliability were improved.Finally,the experiment was conducted to verify the communication function and prove the high reliability and real-time performance of hydraulic support control system.
Key words:electro-hydraulic control system;hydraulic support;Ethernet;CAN-bus
