戰(zhàn)術(shù)導(dǎo)彈協(xié)同任務(wù)規(guī)劃研究
2016-07-21 04:54:31莫文驥蘇丙未
航天控制 2016年4期
廖 沫 劉 洋 莫文驥 蘇丙未
空間物理重點實驗室,北京100076
?
戰(zhàn)術(shù)導(dǎo)彈協(xié)同任務(wù)規(guī)劃研究
廖 沫 劉 洋 莫文驥 蘇丙未
空間物理重點實驗室,北京100076

分析了戰(zhàn)術(shù)導(dǎo)彈協(xié)同作戰(zhàn)模式和關(guān)鍵技術(shù),重點針對導(dǎo)彈協(xié)同任務(wù)規(guī)劃技術(shù)進行分析和研究,提出三級結(jié)構(gòu)的導(dǎo)彈協(xié)同任務(wù)規(guī)劃體系,研究和分析了戰(zhàn)術(shù)導(dǎo)彈協(xié)同任務(wù)規(guī)劃技術(shù)的主要內(nèi)容和關(guān)鍵問題,研究并提出了協(xié)同目標(biāo)分配、航跡規(guī)劃等問題的模型和方法,對典型協(xié)同任務(wù)進行了仿真。 關(guān)鍵詞 多彈協(xié)同;任務(wù)規(guī)劃;目標(biāo)分配;航跡規(guī)劃
導(dǎo)彈協(xié)同作戰(zhàn)是指多枚導(dǎo)彈相互配合、協(xié)作、共同執(zhí)行戰(zhàn)斗任務(wù)。美國在上世紀(jì)70年代提出了協(xié)同作戰(zhàn)的概念,美國和俄羅斯等國家針對導(dǎo)彈協(xié)同攻擊技術(shù)開展了大量研究,并研發(fā)了具有協(xié)同攻擊能力的多種智能型導(dǎo)彈。美國的“網(wǎng)火”(NetFires)導(dǎo)彈武器系統(tǒng)是一種帶指控系統(tǒng)的箱式發(fā)射火箭,將火力打擊、偵察監(jiān)視、效能評估和任務(wù)分配等功能通過數(shù)據(jù)鏈集成一體,采用巡邏攻擊導(dǎo)彈與精確打擊導(dǎo)彈協(xié)同作戰(zhàn)模式,首先發(fā)射巡邏導(dǎo)彈(LAM),在GPS/INS導(dǎo)引下飛至指定目標(biāo)區(qū)域上空盤旋滯留,用激光雷達搜索目標(biāo),發(fā)現(xiàn)敵方蹤跡即發(fā)射低成本的精確打擊導(dǎo)彈(PAM),LAM也可直接攻擊目標(biāo)。俄羅斯的花崗巖[1]超聲速反艦導(dǎo)彈也是最早實現(xiàn)協(xié)同攻擊的代表,導(dǎo)彈在武器系統(tǒng)計算機中建立了各類艦船的完整數(shù)據(jù)庫,彈上計算機貯存了多種現(xiàn)代戰(zhàn)船的目標(biāo)特性數(shù)據(jù)、可能采用的戰(zhàn)術(shù)編隊與電子對抗措施、以及根據(jù)戰(zhàn)場環(huán)境制定的攻防戰(zhàn)略,并進行任務(wù)規(guī)劃。具有“一彈對一艦”、“多彈對單艦”及“組彈對目標(biāo)群”的多種攻擊方式。
戰(zhàn)術(shù)導(dǎo)彈作戰(zhàn)靈活、彈道形式和攻擊方式多樣,容易實現(xiàn)多彈協(xié)同作戰(zhàn),提高導(dǎo)彈智能化水平和整體作戰(zhàn)效能。協(xié)同任務(wù)規(guī)劃是實現(xiàn)戰(zhàn)術(shù)導(dǎo)彈協(xié)同作戰(zhàn)的關(guān)鍵技術(shù)之一,利用多平臺信息,合理分配和調(diào)度資源,進行多彈協(xié)同任務(wù)安排并指揮導(dǎo)彈協(xié)同完成任務(wù)。
本文分析了戰(zhàn)術(shù)導(dǎo)彈協(xié)同作戰(zhàn)模式,在此基礎(chǔ)上對導(dǎo)彈協(xié)同任務(wù)規(guī)劃的內(nèi)容、關(guān)鍵技術(shù)和方法進行了分析和研究。通過一個實例闡述了戰(zhàn)術(shù)導(dǎo)彈協(xié)同規(guī)劃的關(guān)鍵技術(shù)和過程。
1 戰(zhàn)術(shù)導(dǎo)彈協(xié)同作戰(zhàn)模式和關(guān)鍵技術(shù)
戰(zhàn)術(shù)導(dǎo)彈協(xié)同主要包括時間、空間、功能和平臺協(xié)同等模式,在作戰(zhàn)運用時往往是多種模式同時應(yīng)用,實現(xiàn)導(dǎo)彈武器系統(tǒng)最佳效能[2]。典型的協(xié)同方式如下:
1)多彈齊射
在一次攻擊中采用不同頻率、類型的導(dǎo)彈在不同方向上齊射,利用多彈同時攻擊突破敵方防空單元。
2)多彈突防
在不同時刻、不同區(qū)域發(fā)射的導(dǎo)彈同時到達某一防空陣地。利用數(shù)量、快速性和目標(biāo)共享等優(yōu)勢實現(xiàn)單枚導(dǎo)彈依次攻擊無法實現(xiàn)的突防效果。
3)編隊導(dǎo)航、探測和攻擊
在編隊構(gòu)成中,可由不同配置的導(dǎo)彈共同實現(xiàn)復(fù)雜的戰(zhàn)斗任務(wù),如編隊飛行過程中,僅由一枚導(dǎo)彈或部分導(dǎo)彈安裝地形匹配設(shè)備,經(jīng)過匹配區(qū)完成地形匹配后,通過數(shù)據(jù)鏈共享導(dǎo)航修正信息,實現(xiàn)整個編隊成員的導(dǎo)航修正。
導(dǎo)彈編隊攻擊海上運動目標(biāo)群時,接近目標(biāo)區(qū)域后,領(lǐng)彈高彈道飛行,開機探測目標(biāo)群數(shù)據(jù),在編隊內(nèi)分配目標(biāo),通過數(shù)據(jù)鏈向其他編隊成員發(fā)送攻擊目標(biāo)信息,領(lǐng)彈自身也具備攻擊能力,完成目標(biāo)分配后直接攻擊目標(biāo)。其他成員導(dǎo)彈配備低成本短距離探測設(shè)備,接近目標(biāo)后低彈道飛行以提高生存能力,接收到攻擊目標(biāo)信息后低彈道逼近目標(biāo),滿足探測距離后開機鎖定目標(biāo)進行攻擊。
4)“靜默”攻擊
一枚或多枚導(dǎo)彈接近目標(biāo)時開啟主動雷達導(dǎo)引頭,獲取目標(biāo)信息的同時吸引目標(biāo)的注意力,轉(zhuǎn)移火力。目標(biāo)信息通過數(shù)據(jù)鏈發(fā)送給其他編隊成員,使其有機會從側(cè)面接近攻擊。
目前,還出現(xiàn)了干擾彈和戰(zhàn)斗彈協(xié)同及不同類型導(dǎo)彈之間協(xié)同及巡邏-攻擊協(xié)同等新概念協(xié)同方式,隨著技術(shù)的發(fā)展和導(dǎo)彈武器性能的提高,新的協(xié)同方法將不斷出現(xiàn)并得到應(yīng)用。
2 導(dǎo)彈協(xié)同任務(wù)規(guī)劃關(guān)鍵技術(shù)
導(dǎo)彈協(xié)同任務(wù)規(guī)劃的目的是在導(dǎo)彈發(fā)射前和飛行過程中,利用和協(xié)調(diào)導(dǎo)彈的系統(tǒng)資源,合理分配攻擊目標(biāo)及飛行航跡,對飛行動作進行協(xié)調(diào)安排,實現(xiàn)多發(fā)導(dǎo)彈協(xié)同完成作戰(zhàn)任務(wù)。任務(wù)規(guī)劃可分為預(yù)先規(guī)劃和實時規(guī)劃。預(yù)先規(guī)劃是在導(dǎo)彈發(fā)射前制定目標(biāo)分配計劃,確定每發(fā)導(dǎo)彈從發(fā)射點到攻擊區(qū)的飛行航跡。在線任務(wù)規(guī)劃指在任務(wù)執(zhí)行過程中,根據(jù)戰(zhàn)場環(huán)境和任務(wù)變化,實時改變攻擊目標(biāo)和飛行航跡。不論預(yù)先規(guī)劃或?qū)崟r規(guī)劃,均需解決協(xié)同任務(wù)規(guī)劃體系、目標(biāo)分配和航跡規(guī)劃等問題。
2.1 導(dǎo)彈協(xié)同任務(wù)規(guī)劃體系
協(xié)同任務(wù)規(guī)劃體系規(guī)定任務(wù)規(guī)劃的層級、指揮關(guān)系和信息流向等,是實現(xiàn)多彈協(xié)同的基礎(chǔ)。圖1為指揮中心-領(lǐng)彈-成員導(dǎo)彈3層任務(wù)規(guī)劃體系,適用于戰(zhàn)術(shù)導(dǎo)彈協(xié)同任務(wù)規(guī)劃。
圖1 戰(zhàn)術(shù)導(dǎo)彈多彈協(xié)同任務(wù)規(guī)劃體系
指揮中心任務(wù)規(guī)劃根據(jù)上級下達的作戰(zhàn)任務(wù)、目標(biāo)、資源和戰(zhàn)場環(huán)境等綜合信息,進行全局任務(wù)規(guī)劃,確定攻擊波次、編隊組成、編隊任務(wù)和航跡等;接收領(lǐng)彈發(fā)回的信息,對編隊任務(wù)重規(guī)劃,發(fā)送至領(lǐng)彈,改變導(dǎo)彈編隊的任務(wù)。
領(lǐng)彈掌握編隊所有信息和任務(wù),可接收上級任務(wù)指令,根據(jù)自身掌握的信息對編隊進行任務(wù)規(guī)劃/重規(guī)劃,包括改變編隊任務(wù)、重分配目標(biāo)、更新編隊或成員航跡,下發(fā)至成員導(dǎo)彈。領(lǐng)彈根據(jù)偵察信息分配編隊目標(biāo),下發(fā)至各成員導(dǎo)彈。
導(dǎo)彈成員接收指揮中心或領(lǐng)彈的任務(wù)和航跡,也可自主規(guī)劃任務(wù),可實時接收領(lǐng)彈下發(fā)的任務(wù)目標(biāo),規(guī)劃在線航跡,完成協(xié)同作戰(zhàn)任務(wù)。
2.2 導(dǎo)彈協(xié)同目標(biāo)分配
目標(biāo)分配是指揮中心和領(lǐng)彈任務(wù)規(guī)劃的重要內(nèi)容,將多個任務(wù)分配給協(xié)同作戰(zhàn)的導(dǎo)彈,使整體作戰(zhàn)效能達到最大。
多彈協(xié)同目標(biāo)分配包括分配準(zhǔn)則、問題建模及問題求解3個方面。分配準(zhǔn)則的制定需具體分析作戰(zhàn)任務(wù),確定目標(biāo)函數(shù)以及約束;分配問題建模是根據(jù)具體的目標(biāo)分配問題進行數(shù)學(xué)建模,以通過數(shù)學(xué)方法求解;分配問題求解是采用數(shù)學(xué)方法獲取分配策略。
假設(shè)編隊有N個導(dǎo)彈{M1,M2,…,MN},M個目標(biāo){T1,T2,…,TM},定義目標(biāo)分配矩陣XNM:
定義目標(biāo)分配參數(shù):vi為導(dǎo)彈Mi的價值,表示導(dǎo)彈的戰(zhàn)斗力;ρj為目標(biāo)Tj的價值,表示目標(biāo)的重要度;pi,j為Mi攻擊Tj的效率,表示導(dǎo)彈摧毀目標(biāo)的概率;ri,j為Mi攻擊Tj的風(fēng)險,表示導(dǎo)彈攻擊目標(biāo)被攔截摧毀的概率;Pthr,i,j為Mi到Tj的路徑威脅,表示導(dǎo)彈飛行到目標(biāo)點航跡過程中被摧毀的概率;Leni,j為Mi到Tj路徑長度指標(biāo)。

目標(biāo)函數(shù):J1(X)=A·U(X)+B·Y(X),其中A,B為權(quán)系數(shù)。

max(J1(X))
(1)
分配問題的求解是搜索問題,典型方法包括精確搜索,如窮舉法或改進窮舉法[3],啟發(fā)式搜索如模擬退火、禁忌搜索、神經(jīng)網(wǎng)絡(luò)和遺傳算法[4-5]等,多Agent分配如拍賣法[6-7],應(yīng)根據(jù)具體問題,選擇合適的算法。
2.3 航跡規(guī)劃
航跡規(guī)劃是根據(jù)航線地圖、戰(zhàn)場環(huán)境和任務(wù)目標(biāo)等信息,制作導(dǎo)彈的飛行航跡。導(dǎo)彈航跡規(guī)劃問題包括問題建模和航跡搜索兩方面。
2.3.1 問題建模
航跡規(guī)劃問題建模是分析導(dǎo)彈的飛行任務(wù),確定航跡規(guī)劃的目標(biāo)、約束、影響因素及規(guī)劃內(nèi)容,建立導(dǎo)彈航跡規(guī)劃數(shù)學(xué)模型。本文介紹基于Voronoi圖(簡稱V圖)的航跡規(guī)劃模型[8-9]。
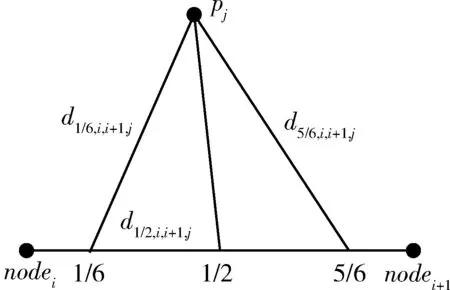
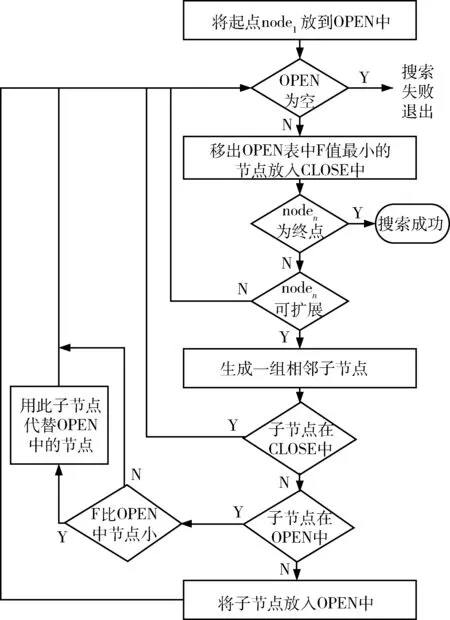
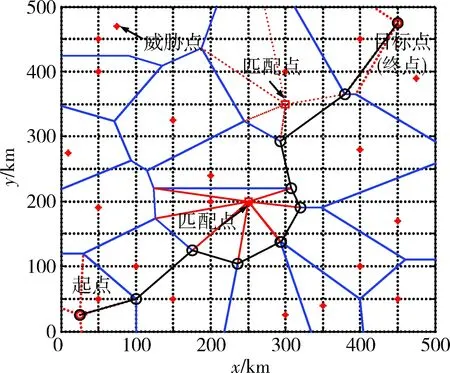
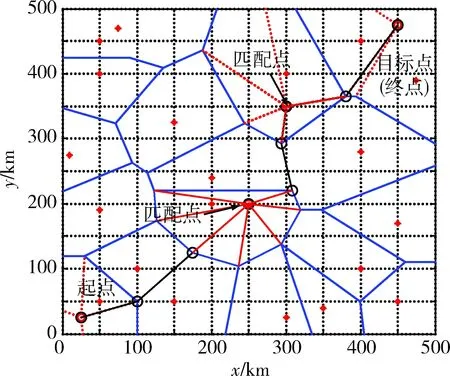
V圖定義為:假設(shè)P={p1,p2,…,pN}為平面上N個互異點,任意兩點距離為dist (pi,pj)。對于二維平面E2上任意點x,任意一點pi都對應(yīng)一個區(qū)域V(pi)={x∈E2|dist (x,pi) 將威脅點集合P={p1,p2,…,pN}作為V圖的母點,以任意相鄰兩點的中垂線組成V圖,當(dāng)導(dǎo)彈沿V圖的每一條邊飛行時,可獲得相對高的安全系數(shù),不偏向任何一方,受到來自兩個點的威脅也最小。圖2為包含起點、目標(biāo)點(終點)和威脅點的V圖,航跡規(guī)劃即獲得從起點到終點,途中經(jīng)過匹配點的滿足約束條件的最優(yōu)航跡,航跡搜索對各V區(qū)域頂點進行搜索,形成沿V區(qū)域邊的節(jié)點序列。如果起點、匹配點和目標(biāo)點不在V區(qū)域邊上,則在相應(yīng)點和所在V區(qū)域的頂點連接線上進行搜索,如圖2所示。 圖2 包含起點、終點和威脅點的V圖 圖3 航路邊(nodei,nodei+1)威脅代價定義 定義航跡規(guī)劃的約束條件: 1) 最大航程約束:Len(S)≤Lmax,Len(S)為S的總長度,Lmax為導(dǎo)彈允許的最大航跡長度; 2) 匹配點約束:?match(i)∈S,要求航路經(jīng)過所有要求的匹配點。 基于V圖的航跡規(guī)劃問題定義為:對于威脅集合P={p1,p2,…,pN},匹配點集合match,通過航跡規(guī)劃獲取航跡S,使得: min(J2(S)) s.t.Len(S)≤Lmax ?match(i)∈S (2) 2.3.2 航跡搜索 A*算法中設(shè)置OPEN和CLOSE兩個表數(shù)據(jù)結(jié)構(gòu),用于存放V圖中“待擴展”和“已擴展”的節(jié)點集合,A*算法流程如圖4所示。 圖4 A*搜索算法流程 對于如圖2所示的規(guī)劃問題,除了傳統(tǒng)的搜索V圖頂點外,還涉及起點、終點和匹配點的搜索,主要處理方式如下: 1) 如當(dāng)前節(jié)點是起點,起點所在的V區(qū)域頂點均為子節(jié)點; 2) 如當(dāng)前節(jié)點為包含終點的V區(qū)域,則終點也可為當(dāng)前節(jié)點子節(jié)點; 3) 對于匹配點,用A*搜索生成起點到第1個匹配點的路徑,然后依次生成到下一個匹配點的路徑,最后生成到終點的路徑,以滿足匹配點約束。 3.1 協(xié)同任務(wù)和想定 以前述編隊導(dǎo)航、探測和攻擊協(xié)同模式為例,編隊由具備地形匹配能力和遠(yuǎn)距離目標(biāo)探測能力的領(lǐng)彈和僅配備短距離低成本目標(biāo)探測設(shè)備的成員導(dǎo)彈組成。導(dǎo)彈編隊飛行剖面如圖5所示,領(lǐng)彈負(fù)責(zé)編隊任務(wù)規(guī)劃,沿預(yù)定航跡編隊飛行至目標(biāo)區(qū)域,領(lǐng)彈通過匹配區(qū)域進行地形匹配,修正導(dǎo)航信息,并通過數(shù)據(jù)鏈發(fā)送至其他成員導(dǎo)彈進行導(dǎo)航修正,實現(xiàn)編隊高精度飛行。接近目標(biāo)區(qū)域后,領(lǐng)彈提前打開目標(biāo)探測設(shè)備探測目標(biāo)群,在導(dǎo)彈編隊內(nèi)分配目標(biāo)后向成員導(dǎo)彈發(fā)送攻擊目標(biāo);成員導(dǎo)彈從領(lǐng)彈處接收目標(biāo)初步位置信息,下壓低空水平飛行,滿足探測設(shè)備作用距離后鎖定目標(biāo)攻擊,實現(xiàn)導(dǎo)彈編隊對目標(biāo)群的高效攻擊。 圖5 典型飛行任務(wù)過程 通過任務(wù)和彈道形式分析,考慮導(dǎo)彈爬升、下壓歷經(jīng)的航程較短,因此協(xié)同任務(wù)規(guī)劃的主要任務(wù)包括編隊航跡規(guī)劃和目標(biāo)偵查后末端攻擊目標(biāo)分配。 3.2 編隊航跡規(guī)劃結(jié)果 采用前述方法構(gòu)建航跡規(guī)劃V圖模型,采用A*搜索航跡規(guī)劃算法,圖6和7給出了含通過匹配點約束和不含匹配點約束2種工況的路徑規(guī)劃結(jié)果,根據(jù)不同的約束條件,沿V圖邊界分別得到了目標(biāo)函數(shù)最優(yōu)的規(guī)劃結(jié)果。 圖6 不通過匹配點的航跡 圖7 通過匹配點的航跡 3.3 終端目標(biāo)分配結(jié)果 根據(jù)前述目標(biāo)分配模型,定義矩陣X4×6,由于末端路徑較短,忽略飛行路徑對目標(biāo)函數(shù)的影響,目標(biāo)分配僅受導(dǎo)彈攻擊能力、目標(biāo)價值、直接攻擊風(fēng)險的影響。考慮到目標(biāo)分配的實時性,采用基于多Agent分布協(xié)同拍賣的動態(tài)目標(biāo)分配算法[7],獲得目標(biāo)攻擊矩陣為: 即導(dǎo)彈M1→T5,M2→T3,M3→T4,M4→T3。 分析了戰(zhàn)術(shù)導(dǎo)彈協(xié)同作戰(zhàn)模式,對戰(zhàn)術(shù)導(dǎo)彈協(xié)同任務(wù)規(guī)劃體系、目標(biāo)分配和航跡規(guī)劃等關(guān)鍵技術(shù)進行了研究和分析。通過仿真實例驗證了編隊導(dǎo)航、探測和攻擊協(xié)同作戰(zhàn)模式。 [1] 劉桐林.花崗巖—世界智能化飛航導(dǎo)彈的先驅(qū)[J].飛航導(dǎo)彈,2005(9):14-18.(LiuTonglin.IntelligentCruiseMissilePioneerGranite[J].AerodynamicMissileJournal. 2005(9):14-18.) [2] 林濤,劉永才,關(guān)成啟,關(guān)世義,張克.飛航導(dǎo)彈協(xié)同作戰(zhàn)使用方法探討[J].戰(zhàn)術(shù)導(dǎo)彈技術(shù), 2005(2):8-12.(LinTao,LiuYongcai,GuanChengqi,GuanShiyi,ZhangKe.AnInvestigationintotheMethodsofCooperativeEngagementforAerodynamicMissile[J].TacticalMissileTechnology, 2005(2):8-12.) [3] 廖沫,陳宗基. 基于滿意決策的多機協(xié)同目標(biāo)分配算法[J].北京航空航天大學(xué)學(xué)報,2007,33(1):81-85. (LiaoMo,ChenZongji.CoordinatedTargetAssignmentinMulti-UAVBasedonSatisficingDecisionTheory[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2007,33(1):81-85.) [4]LeeZJ,SuSF,LeeCY.EfficientlySolvingGeneralWeapon-TargetAssignmentProblembyGeneticAlgorithmswithGreedyEugenics[J].IEEETransactionsonSystems,ManandCybernetics-PartB, 2003, 33(1):113-121. [5] 余舟毅, 陳宗基, 周銳. 基于遺傳算法的動態(tài)資源調(diào)度問題研究[J].控制與決策,2004,19(11):1308-1311.(YuZhouyi,ChenZongji,ZhouRui.OnDynamicResourceSchedulingBasedonGeneticAlgorithm[J].ControlandDecision, 2004,19(11):1308-1311.) [6]AtkinsonML.ContractNetsforControlofDistributedAgentsinUnmannedAirVehicles[C].The2ndAIAAUnmannedUnlimitedSystems,Technologies,andOperations-Aerospace,SanDiego,California, 2003,AIAA-2003-6532. [7] 廖沫, 陳宗基.基于多Agent分布協(xié)同拍賣的動態(tài)目標(biāo)分配算法[J].北京航空航天大學(xué)學(xué)報,2007,33(2):180-183. (LiaoMo,ChenZongji.DynamicTargetAssignmentMethodBasedonMulti-agentDecentralizedCooperativeAuction[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2007,33(2):180-183.) [8] 李亞女,潘廣貞,焦健,等.基于VORONOI圖的無人機快速航跡規(guī)劃研究[J].科學(xué)技術(shù)與工程,2014,14(19):142-147. (LiYanv,PanGuangzhen,JiaoJian,etal.RoutePlanningforUAVsBasedonImprovedVORONOIDiagram[J].ElectronicsOptics&Control, 2014,14(19):142-147.) [9] 葉媛媛,閔春平,沈林成,等.基于VORONOI圖的無人機空域任務(wù)規(guī)劃方法研究[J].系統(tǒng)仿真學(xué)報,2005,17(6):1353-1359. (YeYuanyuan,MinChunping,ShenLincheng,etal.VORONIODiagramBasedSpatialMissionPlanningforUAVs[J].ActaSimulataSystematicaSinica, 2005,17(6):1353-1359.) [10] 馬傳焱.多無人機飛行路徑自動規(guī)劃算法研究[J].無線電工程,2015, 45(2):5-7. (MaChuanyan.ResearchonAutoFlightPathPlanningAlgorithmofMultipleUnmannedAirVehicles[J].RadioEngineering,2015, 45(2):5-7.) [11] 蔡自興,徐光佑.人工智能及其應(yīng)用[M].北京:清華大學(xué)出版社, 2004.(CaiZixing,XuGuangyou.ArtificialIntelligenceandItsApplication[M].Beijing:TsinghuaUniversityPress, 2004.) [12] 夏潔,高金源.滿足戰(zhàn)場需求的實時飛行路徑規(guī)劃[J].北京航空航天大學(xué)學(xué)報,2004,30(2):95-99.(XiaJie,GaoJinyuan.Real-timgFlightPathPlanningforCombatMission[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2004,30(2):95-99.) Study on Coordinated Mission Planning Technology of Tactical Missile Liao Mo,Liu Yang,Mo Wenji,Su Bingwei Science and Technology on Space Physics Laboratory,Beijing 100076, China Coordinatedcombatmodesandkeytechnologiesbytacticalmissilesareanalyzedandcoordinatedmissionplanningtechnologyisfocusedspecially.A3-classmissilecoordinatedmissionplanningframeworkisproposed,andthekeyproblemandmaincontentsofcoordinatedmissionplanningtechnologyarestudiedandanalyzed.Modelandmethodfortargetassignmentandtrajectoryplanningareproposedandstudied.Atypicalcoordinatedmissionplanningcaseisproposedandsimulated. Multi-missilecoordination;Missionplanning;Targetassignment;Trajectoryplanning 2014-10-16 廖 沫(1978-),女,廣西柳江人,博士,高級工程師,主要從事導(dǎo)彈總體設(shè)計;劉 洋(1982-),女,天津人,碩士,高級工程師,主要從事彈道設(shè)計;莫文驥(1981-),男,重慶萬州人,博士,高級工程師,主要從事武器系統(tǒng)總體設(shè)計;蘇丙未(1976-),男,遼寧義縣人,博士,研究員,主要從事導(dǎo)彈總體設(shè)計。 TP316.2;V19 A 1006-3242(2016)04-0070-06



3 仿真實例


4 結(jié)束語