高空氣球吊籃姿控用精簡反捻控制系統設計
2016-07-21 04:54:31張大偉周江華黃宛寧
航天控制 2016年4期
張大偉 周江華 黃宛寧
1.中國科學院大學,北京100049 2.中國科學院光電研究院, 北京 100094
?
高空氣球吊籃姿控用精簡反捻控制系統設計
張大偉1周江華2黃宛寧2
1.中國科學院大學,北京100049 2.中國科學院光電研究院, 北京 100094

提出一種在不加外部力矩測量裝置前提下,利用智能驅動器控制力矩電機工作在電流閉環模式的精簡反捻控制系統,通過控制電機繞組電流值以達到解耦和卸荷作用。首先,通過對現有反捻設計方案的分析,提出了精簡反捻控制系統設計方案。其次,分別對該反捻器的系統級和電路級進行了仿真和分析,進一步驗證了可實現性。最后分析其與反作用飛輪控制系統配合構成的吊籃姿態控制系統具有控制精度高和結構簡單的優越性。 關鍵詞 高空氣球;吊籃控制;反捻器;力矩電機;電流閉環控制
高空氣球是指飛行在平流層的無動力飛行器,球體內充滿氦氣,可攜帶各種設備漂浮在30~40km的高空中。氣球攜帶的設備基本上都裝在吊籃內,吊籃通過纜繩與氣球連接。吊籃搭載的一些科學觀測儀器有穩定指向要求,儀器的俯仰姿態一般是直接控制,方位姿態則是通過控制吊籃的方位來實現。
吊籃方位姿態控制系統由姿態驅動系統和反捻控制系統2部分構成。姿態驅動系統負責控制吊籃姿態,有控制力矩陀螺和反作用飛輪2種方式。前者控制力矩大、控制精度高,但機構復雜,成本高,且能量消耗較大。后者雖然控制效率和精度不如前者,但機構簡單容易實現,且成本和能耗相對較低。
反捻控制系統負責去耦合和飛輪卸荷。高空氣球飛行時會緩慢旋轉,為了克服吊繩扭轉對吊籃方位的影響,吊繩和吊籃之間通常用推力軸承連接。軸承雖然隔離了大部分的吊繩扭矩,但受摩擦力影響,殘余扭矩會不可避免地傳遞到吊籃,如果不能消除其影響就會造成飛輪飽和,失去調節能力。反捻機構通過反向扭轉吊繩達到去耦合的作用。但是反捻機構的去耦合功能不可能完全理想,殘存的力矩隨時間的積累,仍可能造成飛輪飽和,反捻機構還需要產生附加主動力矩實現飛輪的卸荷。
1 現有反捻控制系統設計方案分析
目前已有的反捻器設計方案分別出自文獻[1~3],反捻器均由反捻電機和吊繩扭矩測量裝置兩部分構成,利用扭矩測量裝置測得的扭矩值作為反捻電機的反饋控制量來解耦和卸荷,不同之處在于扭矩測量裝置機械結構的設計。
文獻[1]的反捻控制系統結構示意圖如圖1所示,反捻機構主要由上法蘭盤D1、下法蘭盤D2、推力球軸承、反捻電機、扭矩傳感器及其附屬件構成。D2與吊籃通過板簧連接。扭矩傳感器連接在D2與吊籃之間,反捻電機裝在D2上,當力矩傳感器敏感到D1傳遞給D2的干擾力矩后,可通過反捻電機對法蘭盤D1實施反捻,消除干擾力矩。此扭矩傳感器并不真正傳遞扭矩,只是運用應變片的形變量與受力大小成正比的特性實現對扭矩的測量。對加工工藝要求很高,板簧扭轉時的遲滯、間隙和死區效應,均會直接影響扭矩的測量效果。此外,對傳感器的標定過程也很麻煩,會不可避免地引入測量誤差,再利用測量值作為反饋來控制反捻電機就很難達到理想解耦效果。
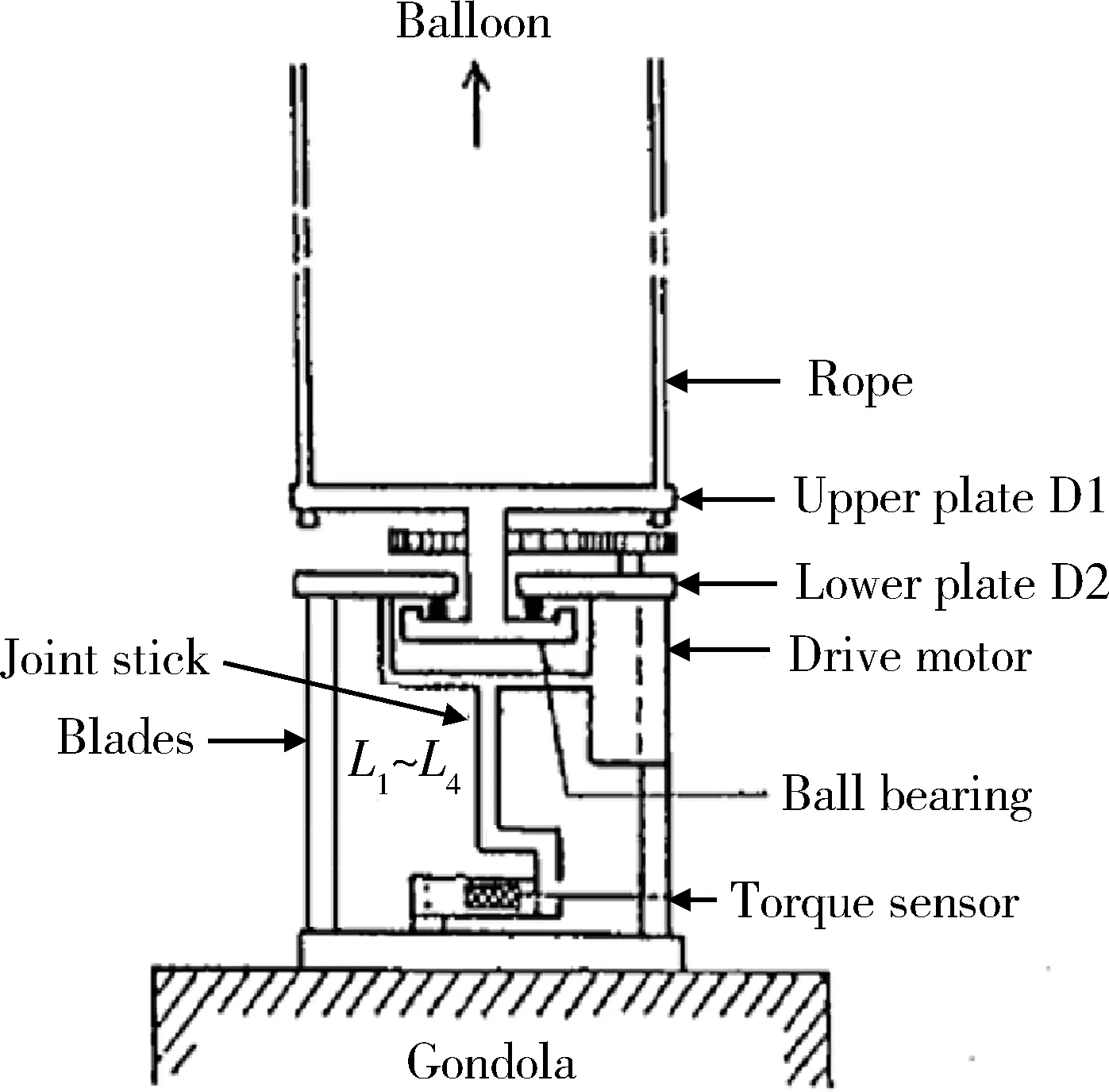
圖1 文獻[1]中的反捻器結構示意圖
文獻[2]的反捻機構延用了文獻[1]的結構,但力矩測量細節有一些區別。D2與吊籃之間改用81根鋼片連接,扭矩傳感器屬于直接測量型傳感器。傳感器的扭轉剛度要遠大于連接剛片的扭轉剛度。否則,測量結果會受到鋼片的干擾。這2種反捻方案對結構設計的要求很高,機構過于復雜,實現起來有相當難度,可能還存在其他的困難,如標定、結構上的脆弱性、板簧扭轉和拉伸可能出現耦合等。
圖2為文獻[3]中反捻器方案硬件結構示意圖。反捻裝置由圓柱剛性外殼、推力軸承、扭變器和反捻電機構成。其中圓柱外殼、電機本體、推力軸承和吊籃為剛性連接,吊繩法蘭盤通過扭變器連接到電機軸上。此方案中扭矩傳感器無法敏感出推力軸承的摩擦力矩,只能部分反映吊繩所傳遞的力矩,不能實現理想的去耦。若將此反捻系統與僅有推力軸承的裝置相比,其去耦功能反倒不如后者,這一結論,可以引用文獻[3]中給出的數據:軸承摩擦力矩0.6~0.9N·m,去耦后的殘余力矩約2N·m,比軸承摩擦力矩大1倍還多。
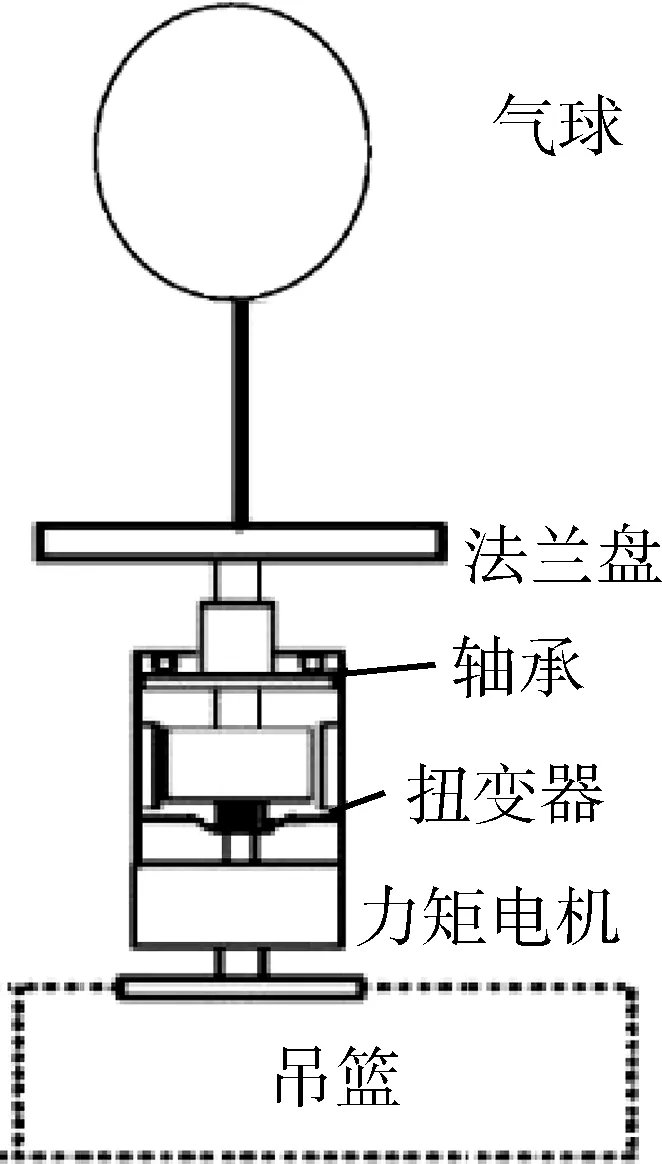
圖2 文獻[3]中的反捻器硬件結構示意圖
2 精簡反捻系統方案
文獻[1-2]中扭矩傳感器測量值基本反映了吊繩傳遞的全部力矩信息,理論上可以實現理想去藕,但機構非常復雜,實現起來比較困難。文獻[3]中,扭矩傳感器測量結果中不包含推力軸承摩擦力矩,只反映了吊繩所傳遞的部分力矩信息,無法實現理想的去耦合,但實現起來比較容易,選擇低摩擦軸承對該方案很關鍵。3個方案均以吊繩傳遞的全部或部分扭矩的測量值作為反捻控制的基礎。而吊繩的扭轉狀態需要累積到一定程度后,才能產生被傳感器所敏感的扭矩。因此,以扭矩作為被調節量,存在一定的滯后,且要求扭矩傳感器足夠靈敏,否則會造成解耦作用不夠徹底。
兼顧結構設計,成本和靈敏度,本文提出了以電流反饋代替力矩反饋的精簡反捻控制系統設計方案:控制電機繞組電流為0值或飛輪卸載力矩等效的值(此值由姿控系統卸載邏輯計算得到),實現對吊籃解耦合或卸荷。吊籃姿態控制系統的整體框圖如圖3所示,吊繩扭轉產生的干擾力矩使反捻電機轉子與定子相對轉動,此相對轉動使電機繞組產生感應電動勢,控制器反饋電流值非0,此時控制電機繞組電流值為0,可使反捻電機產生對干擾力矩的跟隨力矩,達到解耦合的目的,此力矩呈交變力矩,交變頻率越高,控制誤差越小。因此,加快反捻器響應速度可以遏制反捻殘余力矩的影響。同樣,當飛輪轉速將達到飽和時,卸載邏輯會根據飛輪卸載力矩需求計算出反捻控制器電流命令值,控制反捻電機實施卸荷。單獨對反捻控制系統而言,解耦合和卸荷的物理實現過程是一樣的,因此本文后續通過仿真介紹此反捻控制系統可行性時以解耦為目標。此反捻器結構示意圖如圖4所示,轉子與法蘭盤剛性連接,定子固定在圓柱形外殼底部。控制器用電流反饋代替了力矩反饋,因此不需要外部力矩測量裝置。其優點是結構更加簡化,控制簡單,響應快,不會引入力矩傳感器測量誤差。圖5為此反捻系統的三維結構圖。
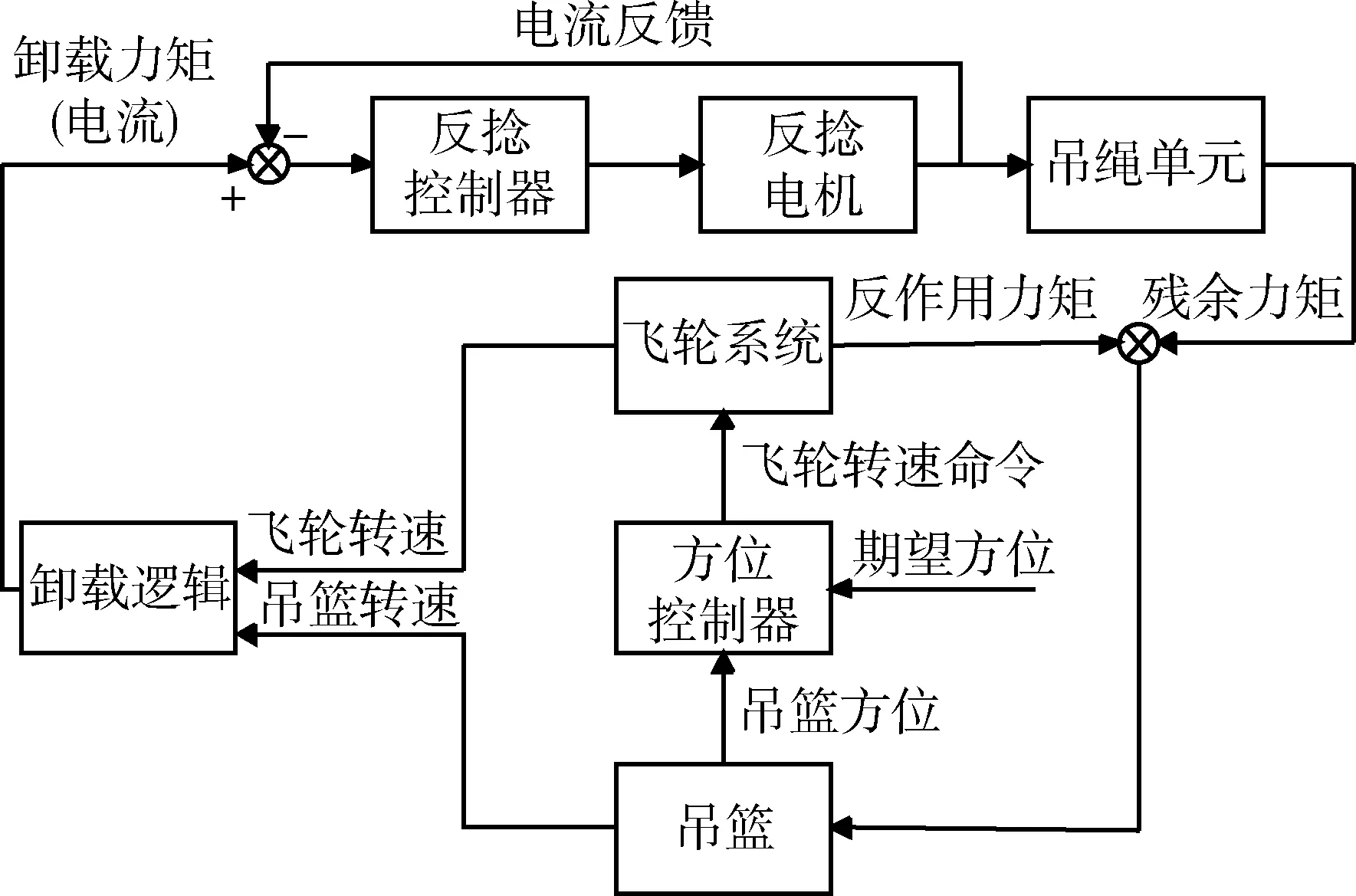
圖3 吊籃姿態控制系統整體框圖

圖4 精簡反捻控制系統硬件結構示意圖

圖5 精簡反捻控制系統三維結構圖
本方案中的反捻驅動裝置不能用電機加減速器(減速比為1∶n;(n>1)),否則電流噪聲會被放大n倍。因此反捻電機選擇力矩電機,驅動器選擇與反捻電機電壓電流范圍相當的一款智能驅動器。其它結構設計細節與本文關系不大,不做闡述。
3 反捻控制系統設計
根據電機電樞回路動態平衡關系式,結構力學關系式,如式(1)~(4)所示,得到反捻控制系統模型框圖如圖6所示。
(1)
(2)
ωed=ωd-ωG
(3)
TRope=Krop(θd-θBall)
(4)

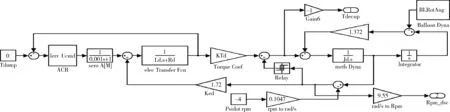
圖6 反捻控制系統模型框圖
反捻控制器(ACR)采用PI控制,在擾動點前后分別是驅動器和電機的等效一階慣性傳遞函數,控制器傳遞函數見式(5),其中,Ki是積分增益,比例增益Kp=Kiτ。
(5)
圖7是與圖6對應的信號流圖,其中有3個獨立回路L1,L2和L3。輸入分別為力矩(電流)命令Tcmd(icmd),氣球角速度ωΒαll,吊籃角速度ωG和摩擦力矩Tf,其中后3個為擾動量。輸出量為吊繩力矩值TRope。根據梅森公式,各輸入(對于系統來說可看做階躍信號)單獨作用于系統時的傳遞函數如
式(6)~(9)所示(穩態分析時認為τs±1≈1):
(6)
(7)
(8)
(9)

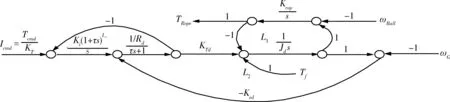
圖7 反捻控制系統信號流圖
根據終值定理(如式(10)所示),在S域對上述4個輸入單獨作用時輸出的穩態分析如表1所示,此反捻系統可以對外界擾動氣流造成的氣球和吊籃隨機轉動實現完全解耦。雖不能對軸承摩擦力矩實現解耦,但根據系統對卸載力矩的跟隨效果,可以外加卸載力矩消除此吊繩殘余力矩。因此,此精簡反捻控制系統可實現去耦合和卸荷的效果。
(10)
本吊籃控制系統的控制目標是重約700kg的吊籃,根據所選結構進行力矩需求分析后,反捻電機選用國內某研究所特殊定制的J160LYX45力矩電機,
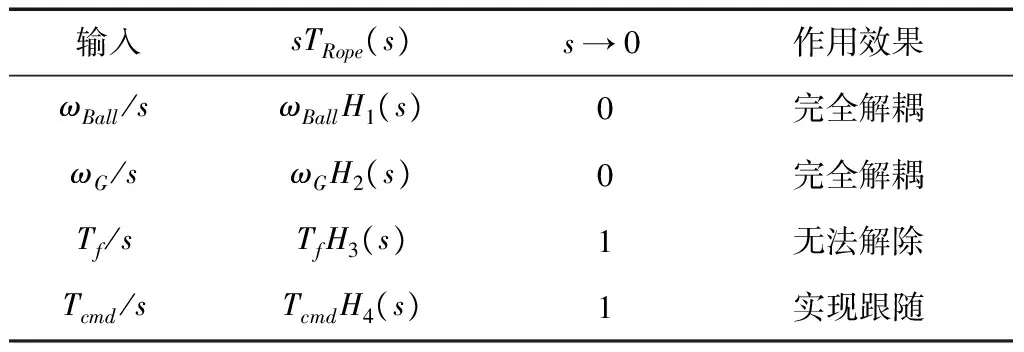
表1 輸出信號穩態分析
其詳細參數列于表2。由仿真分析計算得控制器的比例增益Kp=Kiτ=9.48,積分增益Ki=2370/50。需要注意的是Ki值不能取太大,否則式(6)~(9)中傳遞函數會出現共軛純虛數極點,使輸出產生振蕩,得不到理想跟隨效果。
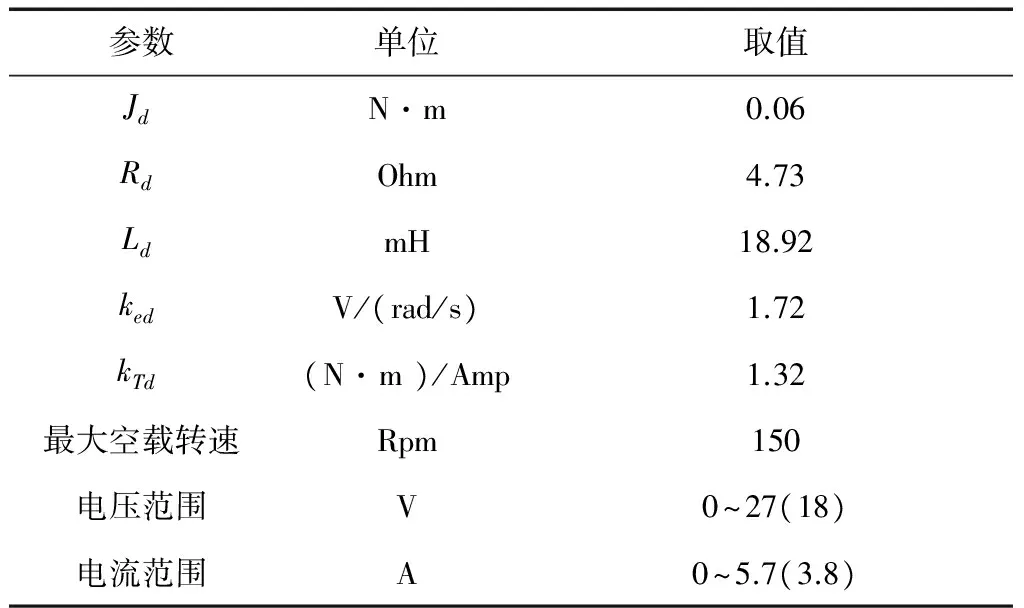
表2 電機主要技術參數
4 反捻器系統級仿真
根據第3節建立的反捻系統模型,設定初始輸入電流命令值為0;吊籃自身的隨機轉速ωG=4rpm;軸承靜摩擦力矩Tf=0.5N·m;文獻[1]指出高空氣球平流層轉速在0.1~0.01rpm之間,我們在2004年做的2次高空氣球項目的相關試驗數據也顯示氣球的轉速保持在這個范圍之內,保守考慮,取氣球做ωBall=0.1rpm的勻速轉動。
對此反捻系統仿真后得到反饋電流的曲線如圖8所示,曲線在剛開始的前6s內超調比較大,波動較劇烈,隨后曲線漸變平緩,大約8s后電流值基本保持在0點附近,整定效果比較理想。在控制過程中吊繩力矩的變化曲線如圖9所示,在剛開始控制的前5s內,力矩變化比較劇烈,以后漸變平緩,保持為0.5N·m,與軸承摩擦力值大小相等。驗證了上面提到的此反捻控制器無法消除軸承摩擦力矩的結論。
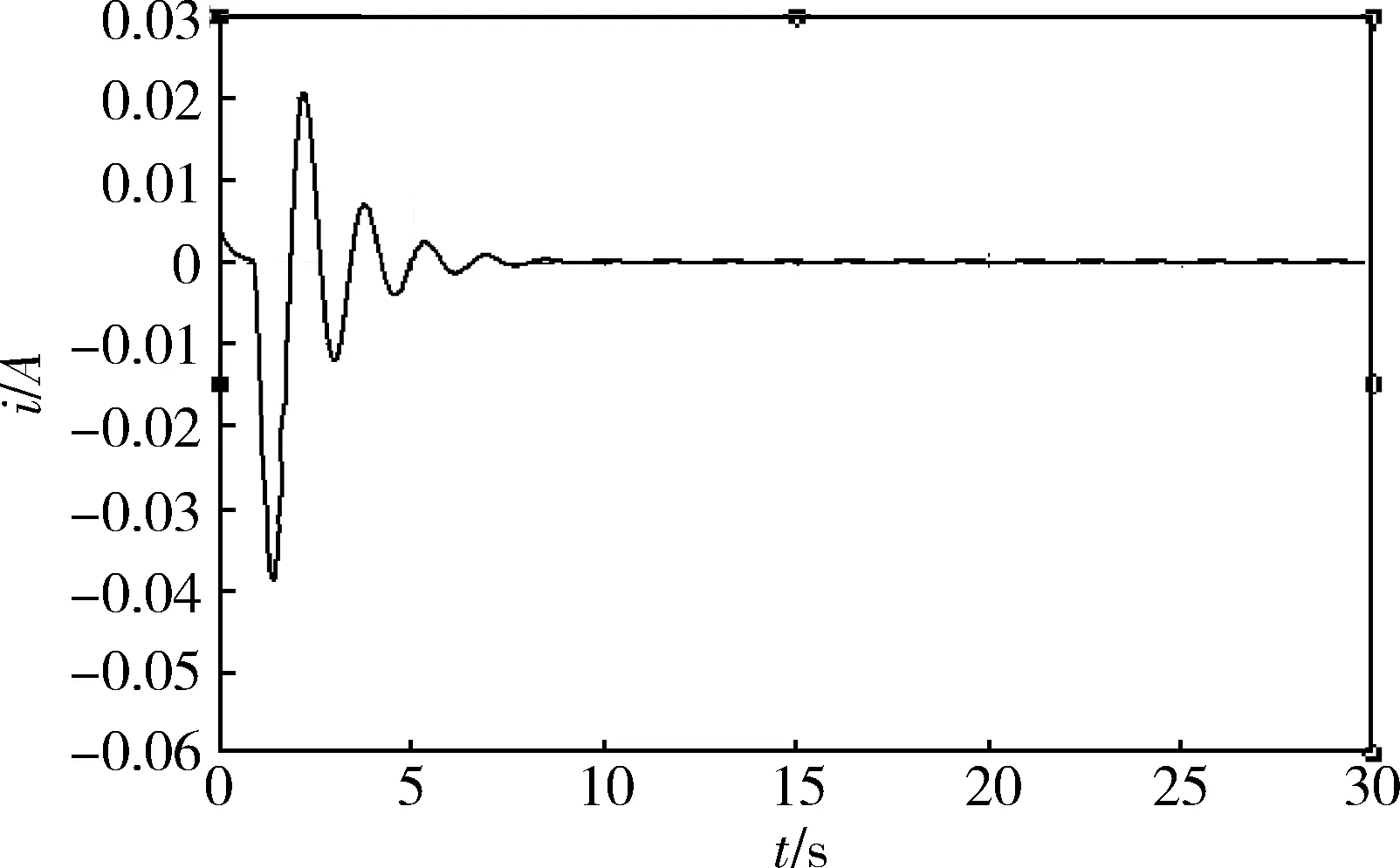
圖8 反捻控制系統反饋電流曲線
5 反捻器電路級仿真
上一節所做的系統級仿真為了加快仿真速度,
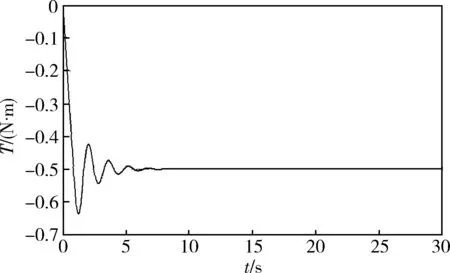
圖9 吊繩力矩變化曲線
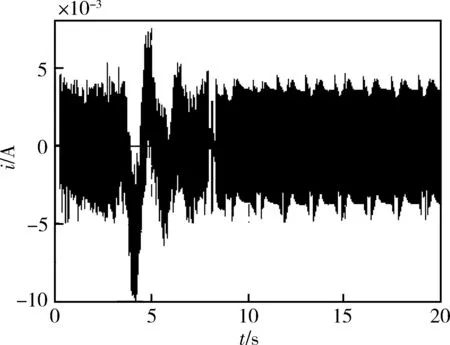
圖10 反捻控制系統反饋電流變化曲線
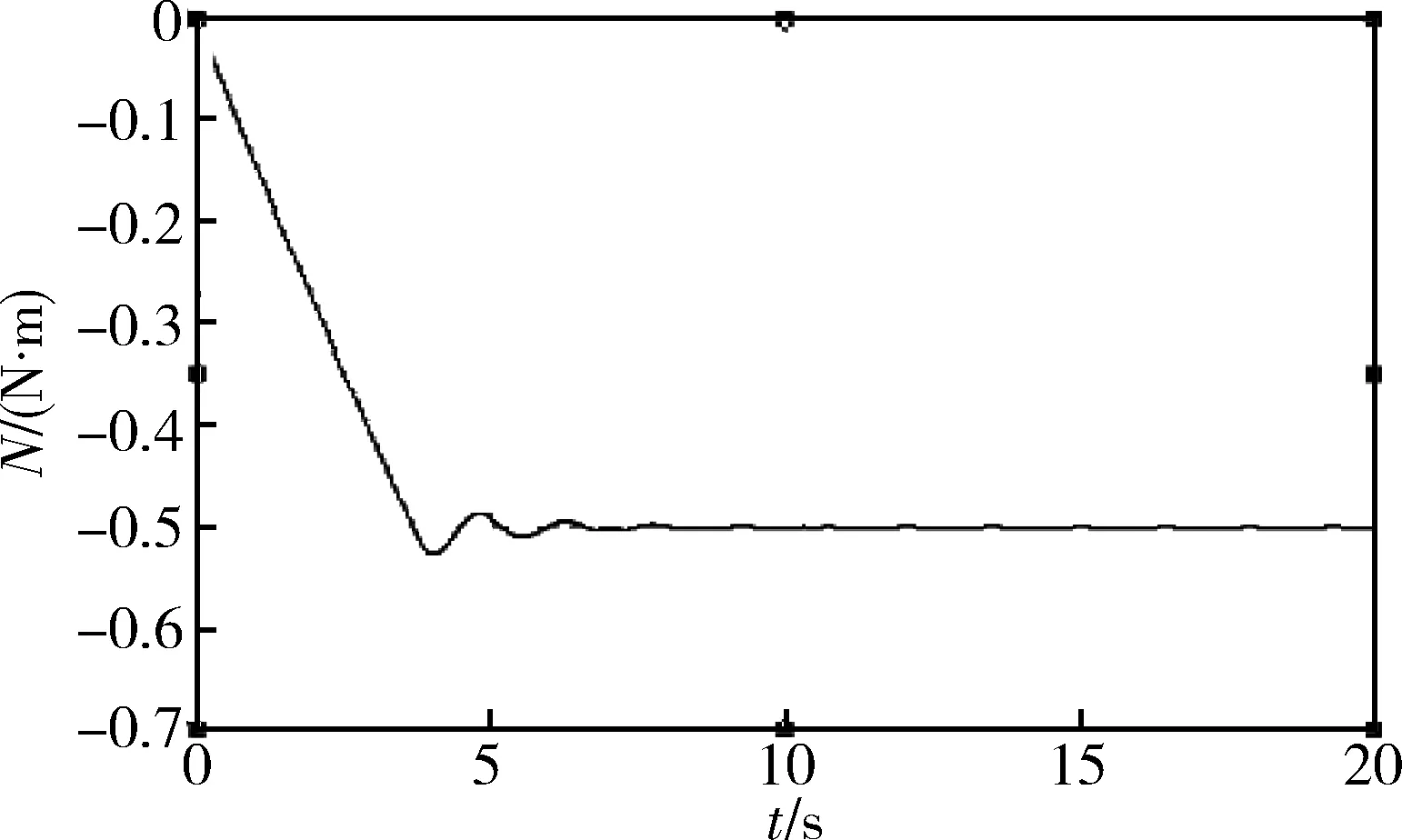
圖11 吊繩力矩變化曲線
對電機驅動器和電機的數學模型進行了理想化的簡化和近似。本節則利用Matlab提供的電力電子仿真工具箱,將電機驅動器和電機用實際電路模型代替,如圖12所示,評估其考慮實際電路特性后對控制回路的影響。反捻器電流環(力矩環)控制器輸出的控制參考電壓送入PWM發生器,將PWM發生器輸出的脈沖作為門信號,控制由功率MOS管構成的雙臂全橋的通斷,構成直流有刷電機的兩相電源輸入來驅動電機轉動。PWM發生器基準頻率取4kHz。圖13給出反捻器電路級仿真的整體框圖,仿真后得到的反饋電流曲線如圖10所示,與圖8相比,電流值同樣在大于8s后保持在0值附近,但曲線由原來的連續點變為了一系列離散點,這是由系統自身的連散性決定的。圖11所示是吊繩上力矩值變化曲線,與圖9的控制效果一樣,只是采用電力電子仿真后,由于其內部器件對信號的延時比系統級仿真大,因此控制曲線的脈動較理想模型稍小,這符合實際規律。
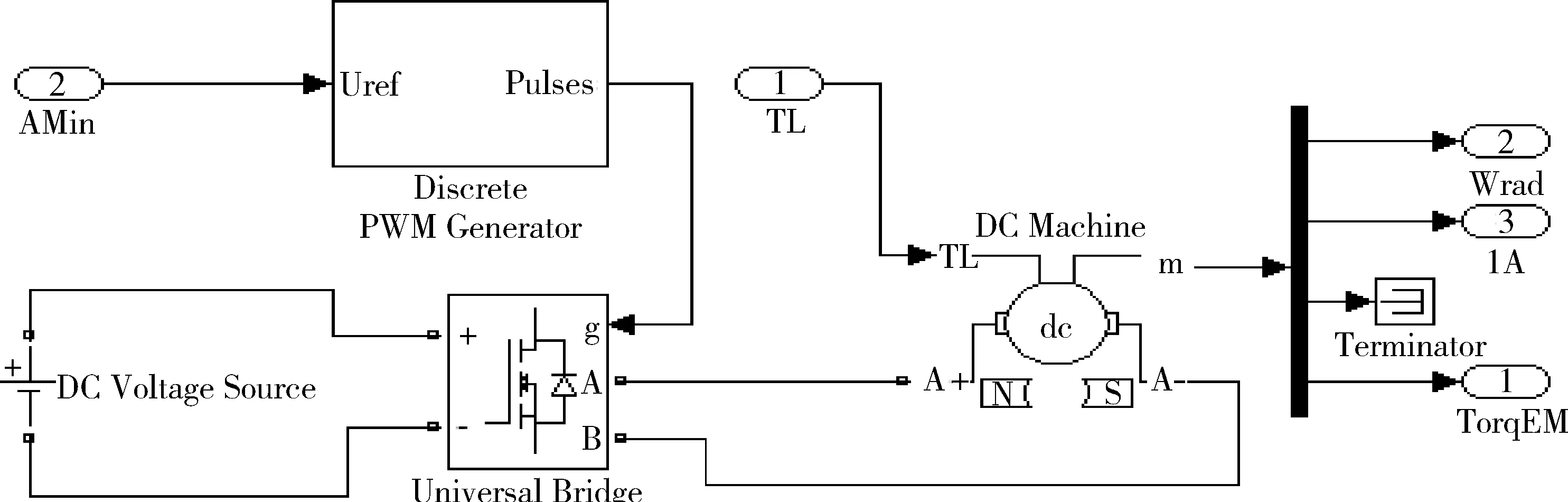
圖12 電機驅動器和電機實際電路模型
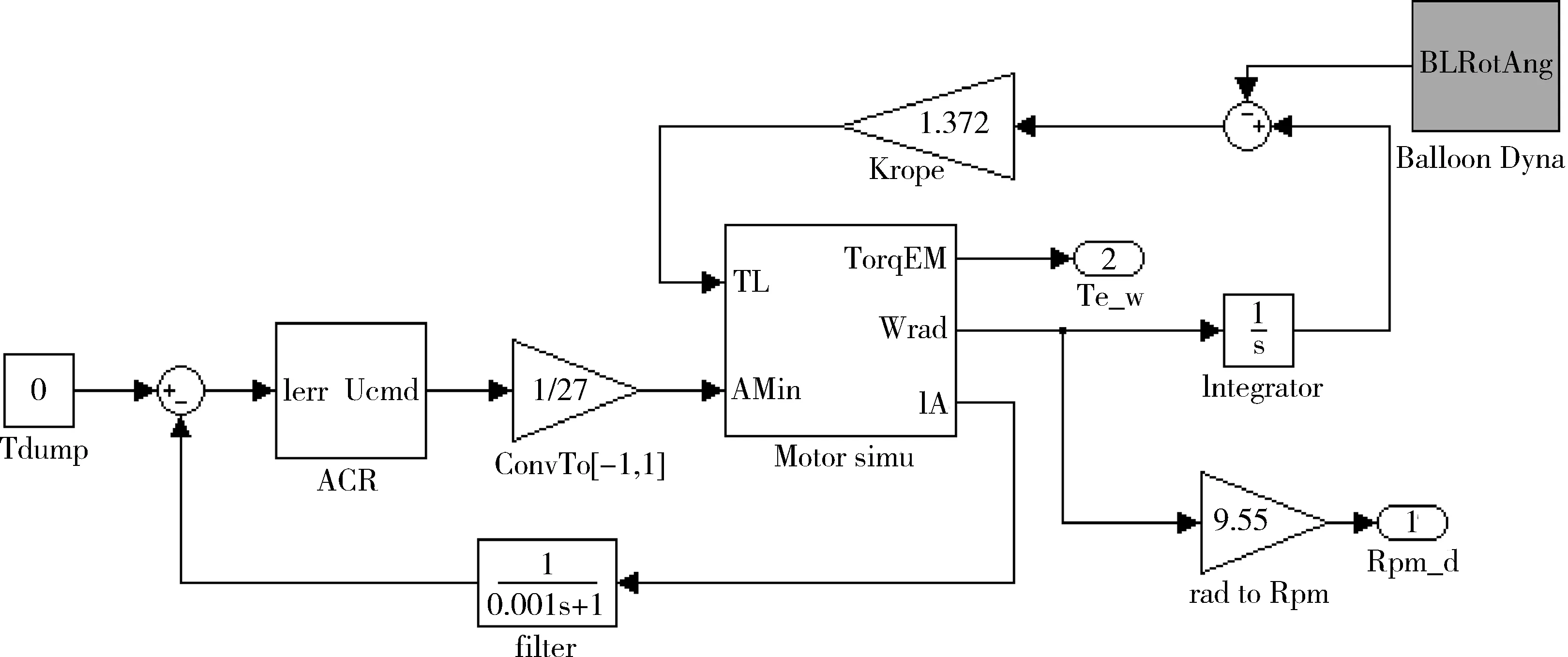
圖13 反捻器電路級仿真整體框圖
6 吊籃姿態控制仿真
采用此反捻器的吊籃姿態控制系統的框圖如圖14所示,期望方位角為-22°,初始方位角為0°。從仿真結果圖15看,方位角實現了小于0.1°的穩定控制。圖16為吊繩扭轉角及氣球和反捻器轉角曲線,從圖中可以看出在大約15s后氣球和反捻器的轉角值相等,吊繩扭轉角保持為0值,吊繩無向下傳遞的力矩,即實現了完全解耦。這表明設計參數和設定指標合理可行,且所選定的飛輪電機和反捻電機能夠滿足控制需求。
7 結論
通過對現有的反捻器設計方案進行分析,提出了無需外部測量裝置工作在電流閉環模式下的精簡反捻器設計方法。對反捻器進行建模后,首先分別對不同擾動輸入所對應的輸出穩態值的分析證明了此反捻器的理論可行性,然后分別從系統級和電路級對其進行了仿真分析,進一步論證了其可實現性以及響應快和結構簡單的優點。下一步將通過飛行試驗驗證此高空氣球吊籃姿態控制系統實際控制性能和精度。
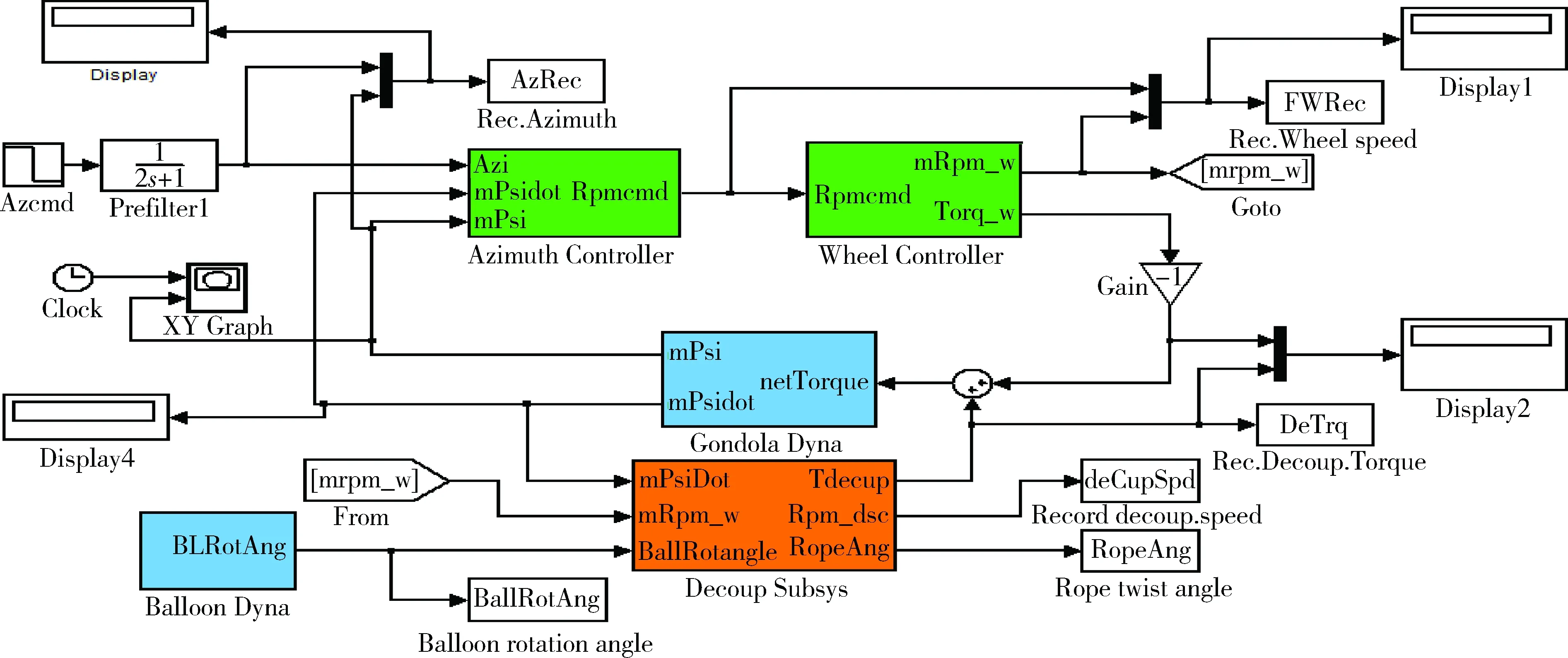
圖14 吊籃控制系統框圖
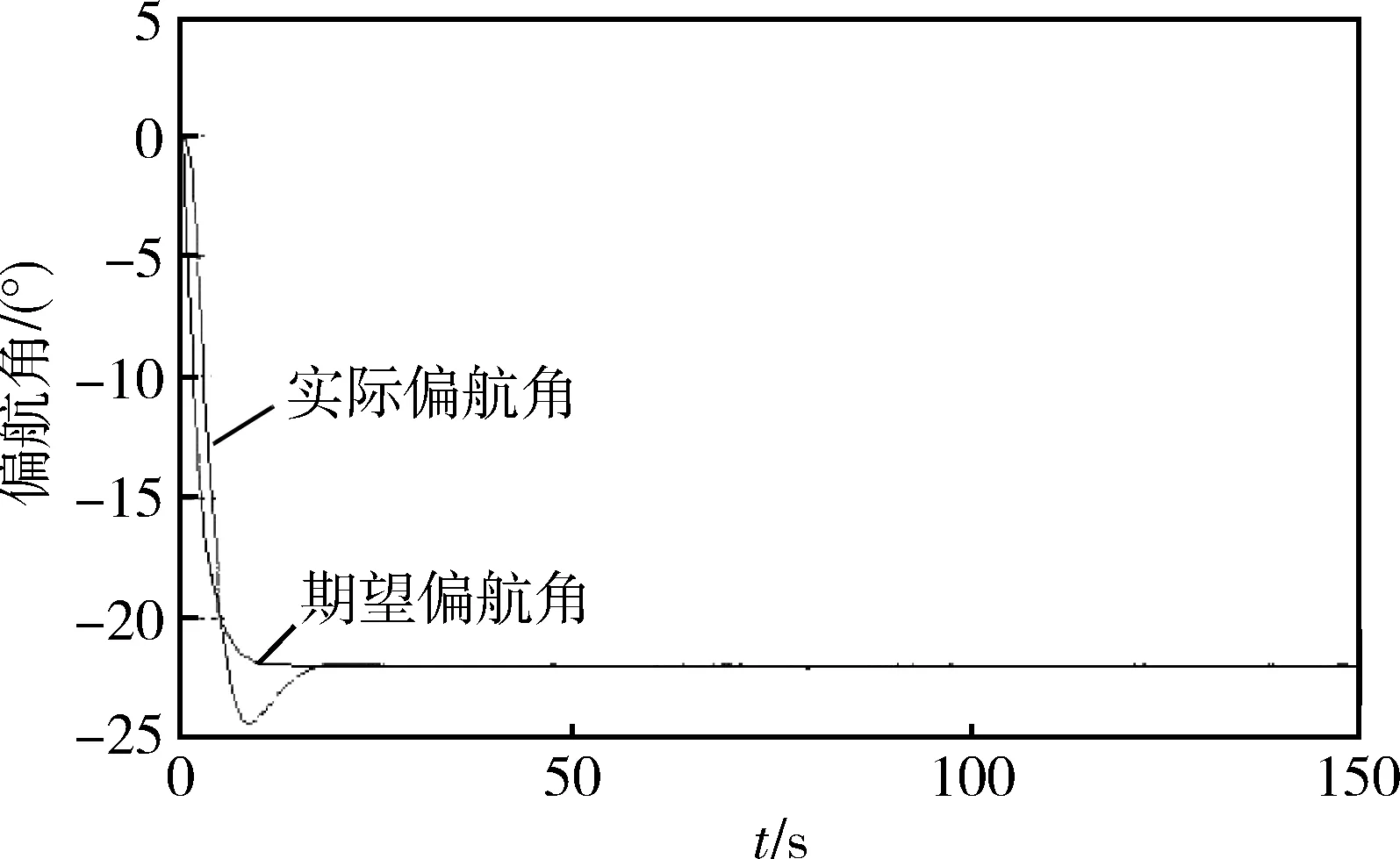
圖15 吊籃控制系統控制效果仿真曲線
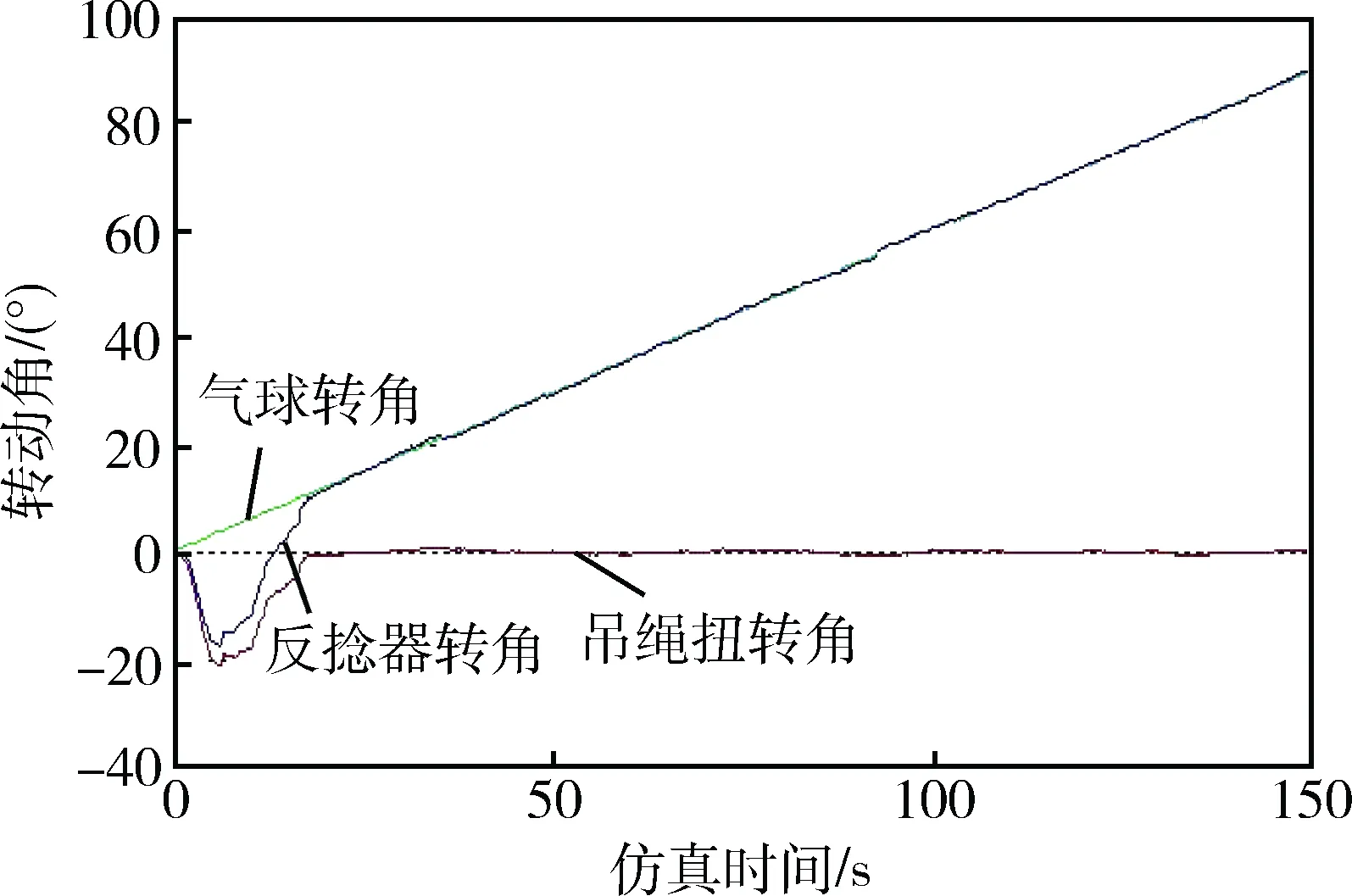
圖16 吊繩扭轉角及氣球和反捻器轉角
參 考 文 獻
[1] 矢島信之,小鍛治繁,橋野賢.氣球搭載望遠鏡方向控制系統研究[M].日本:機械技術研究所, 1986. (Namiki,Sakura-mura,Niihari-gun,Ibara.ThePointingControlofBalloon-BorneTelescope[M].MechanicalEngineeringLaboratory,Japan,1986.)
[2] 葉祥明. 大型球在望遠鏡高精度姿態控制及指向技術研究[D]. 北京: 中國科學院大學,1999.(YeXiangming.StudyonHigh-accuracyAttitudeControlandPointingTechnologyofaLargeBalloon-borneSolarTelescope[D].Beijing:UniversityofChineseAcademyofSciences,1999.)
[3] 王鴻輝,袁朝暉,何長安. 球載吊籃方位控制綜合解耦器設計[C].ChineseControlConference(CCC),Xi′an, 2013July.(WangHonghui,YuanZhaohui,HeChangan.DesignofComprehensiveDecouplerforBalloon-borneGondolar’sAzimuthControl[C].ChineseControlConference(CCC),Xi′an,2013July.)
[4] 何琳琳,竇滿峰. 高空氣球吊籃姿態控制系統的一種實現[J]. 微電機,2006,6(39):77-80.(HeLinlin,DouManfeng.ASortofRealizationontheAttitudeControlSystemofNacelle[J].Micromotors, 2006, 6(39):77-80.)
[5]YuPeijun,XiaKeqiang,LiJiancheng.ADesignofReconfigurableSatelliteControlSystemwithReactionWheelsBasedonErrorQuaternionModel[C].InternationalConferenceonInternetComputing&InformationServices(ICICIS),HongKong,2011Sept.
[6]ToshihikoNakanoYS,MutsumiYamamoto.ThePointingControlMethodofBalloon-BorneTelescope[C].IEEE/SICEInternationalSymposiumonSystemIntegration(Sll),Japan, 2012December.
A Simplified Design of Decoupling Control System in Balloon Gondola
Zhang Dawei1,Zhou Jianghua2,Huang Wanning2
1. University of Chinese Academy of Sciences, Beijing 100049, China 2. Academy of Opto-Electronics, Chinese Academy of Sciences, Beijing 100094, China
Asimplifieddecouplingmechanismconsistingofintelligentdriverandtorquemotorwithoutexternaltorquemeasuringdeviceisintroduced.Thisdesignmethod,whichemploystheintelligentdrivertocontrolthetorquemotorincurrentclosedloopmodeandtokeepthewindingcurrentinacertainvalue,canbeusedtoachievethegoaltodecreasethespeedofthewheelmotoranddecoupledisturbancetorques.Bytheanalysisofexistingmethods,asimplifieddesignisimplementedtosimulatethedecouplingmechanisminbothsystemandcircuitlevels,andthenitisproventhatitcanofferacontinuouscontrolwithhighprecisionandreliabilitywhencombiningwithreactionflywheelcontrolsystem.
Balloon-borne;Nacelle;Decouplingmechanism;Torquemotor;Currentclosedloop
2015-10-15
張大偉(1986-),男,河北人,碩士,主要研究方向為飛行器控制與仿真;周江華(1973-),男,江西人,博士,研究員,主要研究方向為飛行器動力學與控制;黃宛寧(1980-),男,河南人,碩士,高級工程師,主要研究方向為浮空器測控。
V448.2
A
1006-3242(2016)04-0076-07