在大學生課外科技項目中靈活運用多種機械原理機構有效提高學生的設計能力
2016-07-27 00:44:55蔡曉君郭麗峰張瑞徐林林
大學教育 2016年7期
蔡曉君+郭麗峰+張瑞+徐林林
[摘 要]大學生課外科技活動,靈活運用多種機械原理機構有效提高學生的設計能力,設計完成一種雙向自動爬管(桿)裝置,可以在該裝置中巧妙運用變異曲柄滑塊機構、剎車機構和交替卡緊機構等多種機械原理機構。裝置總體構思巧妙,僅通過控制電機正反轉即可實現裝置在管(桿)上的雙向運動,并實現交替卡住機架和上爪的剎車等操作,是一種很好的管道或桿件檢測、清潔、維護等操作工具。
[關鍵詞]機械原理;機構;爬管裝置;曲柄滑塊;剎車塊結構
[中圖分類號] G642.0 [文獻標識碼] A [文章編號] 2095-3437(2016)07-0128-02
機械原理課程設計是高等學校機械類專業學生在《機械原理》課程理論教學完成后進行的一項重要的綜合性實踐教學訓練活動。學生通過機械原理課程設計可以進一步鞏固、掌握并初步運用機械原理的知識和理論,培養學生機械系統運動方案設計能力、解決實際問題的能力以及機械開發創新能力。在設計題目的設置時,摒棄了由授課教師獨立確定題目的“一言堂”做法,教師、學生、家長共同參與題目設定,并與實踐緊密結合。機械原理課程設計題目由三部分組成:(1)封閉式題目——教師命題,保留多年來的經典設計題目并作適當擴展;(2)半開放式題目——結合學科競賽、教師科研項目等實際需求,教師、學生共同提出項目功能目標,設定成果方式;(3)開放式題目——主要由學生自主選題確定。學生自主選題主要考慮學生以及家庭研究淵源,學生長期感興趣、有一定研究積累的特長,家長在特定領域研究成果的拓展等。
將機械原理課程設計與大學生課外科技訓練相結合,教師指導學生依據興趣選題,充分調動社會、家庭參與研究訓練的積極性,題目采用學生自選和教師指定相結合的原則,具有學生感興趣的諸多因素。如雙向管道爬行裝置的設計與制作、糕點切片機的設計與制作、具有逃生功能自動窗的設計與制作等。
在雙向管道爬行裝置的設計與制作中,學生首先對該裝置的實際運用進行了深入的調研。發現工程實際中存在大量的管道或者桿狀的結構,對于它們的維護、監測、清潔的手段相對比較落后,基本靠人力手工完成。如能設計一種在管(桿)狀結構上自動靈活雙向移動的裝置,實現方便、快捷、平穩的爬動,將非常必要,而且可將該裝置作為一個平臺,整合在其他的裝置上完成所需的既定動作,在生產生活實際工作中將扮演多種運送機械手的重要角色。
一、爬管(桿)裝置總體設計思路
為了實現裝置在管上自由爬動,而且運行平穩安全,結合機械原理已知各個運動機構,最終選擇變異曲柄滑塊機構為主體爬行機構,而鎖緊機構確定為轉動的剎車橡膠塊機構,具體結構示意圖如圖1所示。
在圖1變異曲柄滑塊主體機構中,A為裝置工作時依附的管(桿)構件,B為上爪,套在管A上,C為連桿,連接上爪和曲柄,D為電機驅動的曲柄,可以整周轉動,安裝在機架上。E為滑動擺桿,能在曲柄的帶動下左右擺動,F為機架,可套在管A上。
電機驅動曲柄D,在曲柄D驅動下,滑塊機構能實現裝置在管構件上的上下爬動的要求,而鎖緊機構則整合在上爪B和機架F上,實現上爪和機架的交替鎖緊,從而達到設計目的。
二、變異曲柄滑塊機構的設計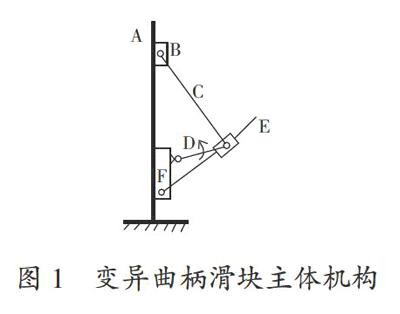
根據設計要求,所爬的管(桿)機構直徑在50~100mm范圍內,其余各運動機構的尺寸均按該要求設計。根據實際裝置的尺寸,計算選擇曲柄D的長度為Ld=100mm,曲柄D與連桿C的尺寸比設計為1∶3,故連桿Lc=300mm,擺桿E設計為與連桿C等長,即搖擺LE=300mm。為確保裝置在管(桿)構件上平穩運行,選擇其平均爬行速度為v=10mm / s,曲柄轉動一周裝置爬行400mm,用時40s,所以曲柄角速度ω=1.5r / min。圖2為設計完成的裝置整體三維模擬圖。
如圖2所示,工作時驅動電機安裝在機架F上,隨著電機運動帶動曲柄D轉動,當機架F夾緊時,曲柄D轉動帶動連桿C的上爪B移動;當上抓B加緊時,曲柄D轉動時可帶動連桿C及機架F移動。這樣上爪B與機架F交替加緊、移動,可以完成裝置在管(桿)上的平穩滑動。
為保證裝置能夠具有一定負重,并且在管(桿)構件上平穩滑動,如圖3、圖4所示,上爪B和機架F均由三個可調滑輪G壓緊在裝置依附的管道上。
三、轉動剎車塊結構的設計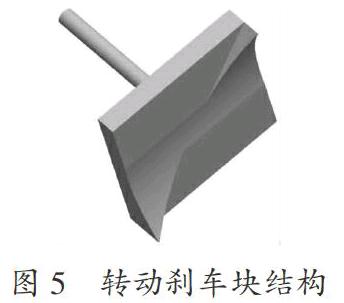
為保證上抓B和機架F能夠平穩、連續交替夾緊管(桿)構件,特別設計制作了用于夾緊的轉動剎車塊結構,如圖5所示。
如圖5所示轉動剎車塊設計成中間凹狀結構,便于箍緊管(桿)構件,為有效增大摩擦阻力,材料可選用橡膠等非金屬材料。作為裝置的關鍵零件,運動時剎車塊結構轉到一定位置時能保證在管(桿)構件上卡緊上爪B或機架F,從而達到裝置交替爬動的目的。
結合上述討論的變異曲柄滑塊機構設計,如圖6、圖7所示為轉動剎車塊結構工作原理示意圖。在圖6中曲柄D轉動,連桿C隨之擺動,剎車塊H與連桿C固連,所以剎車塊H也能隨著連桿C轉動,此時由于轉動剎車塊結構形狀的特殊性,其會在一定位置時帶動上爪B卡緊在管(桿)上。
同理,如圖7所示,曲柄轉動D,滑動擺桿E隨之擺動,剎車塊H與擺桿E固連,剎車塊H也隨擺桿E轉動,由于轉動剎車塊結構形狀的特殊性,其會在一定位置下帶動機架F卡緊在管(桿)上。圖8、9、10、11為剎車塊工作狀態示意圖。


以裝置上行為例,當機架F上的滑動擺桿E帶動剎車塊轉到圖8位置時,剎車塊把機架F卡緊在管(桿)上,此時上爪B剎車塊處于松開狀態如圖9所示,由于電機轉動,連桿會推動上爪B向上移動;而當機架F剎車塊轉到圖10位置松開時,上爪B剎車塊則轉到圖11位置卡緊狀態,電機轉動此時會拉動機架F向上移動,這種周而復始的運動,完成整個裝置沿管(桿)穩步上行。只要改變電機轉向,裝置可實現平穩下行,裝置下行原理相同。
由于剎車塊是橡膠材料,加工方便,其工作時靠摩擦力來鎖緊上爪B或者機架F,所以其尺寸需要根據工作依附面的具體情況來選材及設計尺寸。
四、結論
雙向自動爬管(桿)裝置,主要由曲柄、連桿、滑動擺桿、上爪、機架、電機、銷釘、螺栓、螺母、剎車塊、滑輪零部件組成。電機帶動曲柄滑塊裝置運行,并通過整合在其上的剎車塊的轉動,上爪和機架交替卡緊,從而使得裝置實現上爬或下爬。整個機構設計獨特,構思巧妙,能最安全便捷的實現在管狀物體上的平穩移動,為工程中的管道檢測維護實現自動化提供了一個很好的平臺。
通過理論與實踐教學活動、課外科技活動、科學研究等途徑,在指導學生深入學習理論知識的前提下,將教學與大學生課外科技活動有機結合,通過項目驅動的方法貫穿始終,使學生受益匪淺。
[ 參 考 文 獻 ]
[1] 申永勝.機械原理教程[M].北京:清華大學出版社,2006:50-120.
[2] 韓曉娟.機械設計課程設計[M].北京:機械工業出版社,2006:20-100.
[3] 緊固件連接設計手冊[M].北京:國防工業出版社,2008:10-150.
[4] 蒲良貴.機械設計[M].北京:高等教育出版社,2015:10-220.
[5] 陸鳳儀.機械設計[M].北京:機械工業出版社,2011:30-100.
[6] 江洪.Solidworks動畫演示與運動分析實例解析[M].北京:機械工業出版社,2006:10-140.
[7] 楊魏.機械原理[M].北京:機械工業出版社,2012:20-190.
[8] 蔡曉君,傅水根,竇艷濤.依托教學實驗基地構建工程實踐教學新體系[J].實驗技術與管理,2007(9):125-127.
[9] 蔡曉君,劉湘晨,竇艷濤.加強實踐教育 提高學生的工程素質與能力[J].實驗室研究與探索,2009(1):136-138.
[責任編輯:張 雷]