基于虛擬阻尼補償的恒功率負載系統控制方法
2016-08-30 06:04:51宋欣達鄭世強
電機與控制學報 2016年8期
關鍵詞:系統
宋欣達, 鄭世強
(1.北京航空航天大學 慣性技術重點實驗室,北京 100191;2.北京航空航天大學 新型慣性儀表與導航系統技術國防重點學科實驗室,北京 100191;3.北京市高速磁懸浮電機技術及應用工程技術研究中心,北京 100191)
?
基于虛擬阻尼補償的恒功率負載系統控制方法
宋欣達1,2,3,鄭世強1,2,3
(1.北京航空航天大學 慣性技術重點實驗室,北京 100191;2.北京航空航天大學 新型慣性儀表與導航系統技術國防重點學科實驗室,北京 100191;3.北京市高速磁懸浮電機技術及應用工程技術研究中心,北京 100191)
電動機負載廣泛存在于各個工業領域,其閉環控制對前級功率系統表現為恒功率負載(constant power loads, CPL)特性,即負阻抗特性,給系統帶來了穩定性的影響。針對基于前置BUCK變換器的電動機驅動系統穩定性問題進行了研究。首先對基于前置BUCK變換器的電機驅動系統進行了建模,分析了影響系統穩定性的機理,在此基礎上提出了一種基于虛擬阻尼補償的控制策略,這種方法可以在不增加系統損耗的前提下有效抑制負阻抗特性對直流母線電壓的影響,并給出了補償系數的設計流程。仿真和實驗證明這種方法提高了系統穩定性,增加了電機驅動系統穩定帶載的能力。
電機驅動;buck;恒功率負載;虛擬阻尼補償;穩定性
0 引 言
恒功率負載通常是指正常工作時系統從前級電源吸收的功率基本保持恒定值的一類負載[1],即輸出功率基本恒定的負載,廣泛存在于各類工業設備中,例如電機驅動系統、理想閉環的功率轉換模塊、以及各類分布式配電系統等都具有恒功率負載特性[2-4],其具有的負增益阻抗特性影響了系統的穩定性。
近年來,國內外學者針對恒功率負載的特性及其在各個領域的應用進行了廣泛研究[2-10],抵消恒功率負載的負增益阻抗特性的方法總的來說可以分為無源法和有源法兩類,無源法通過增加阻尼補償電路[5-7]或者阻尼濾波器[8]以增強系統的穩定性,優點是算法簡單可靠性較高,然而體積質量大且增加額外硬件和損耗的缺點也顯而易見;有源法則通過建立小信號模型,在控制回路中增加穩定模塊[9]、阻抗補償器[10]、功率補償模塊[11-12]等方式抵消負阻抗特性,增加系統的穩定性,此類方法不增加額外的硬件和損耗,尤其適合功率級聯系統,但對系統的控制性能要求較高。
永磁電機由于具有能量密度大、效率高、體積小等優點,廣泛應用于風機和泵類等各工業領域[13-16],其逆變驅動系統具有典型的恒功率負載特性。前置DCDC變換器電機驅動系統具有諧波含量低、整體效率高等優點[17-19],本文以前置BUCK變換器的永磁電機驅動系統為研究對象,在前人研究的基礎上,給出系統穩定的條件。并從恒功率負載特性入手,提出一種抑制恒功率負載特性的虛擬阻尼補償法,在不增加系統損耗的前提下,提高系統的穩定性和帶恒功率負載能力。
1 基于前置BUCK變換器的電機驅動系統建模
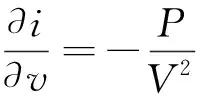
基于BUCK變換器的電機驅動系統主要包含整流模塊、BUCK斬波模塊和逆變模塊等,其原理圖如圖1所示。正常驅動電機時剎車管不工作,因此忽略其影響,逆變橋驅動電機為理想閉環,則對于前級功率變換模塊則等效為CPL,則CPL的電壓v、電流i和功率P的關系為
(1)
對于一個給定的工作點P(I,V),可以得到工作點附近電流變化率
(2)
圖1 基于前置BUCK變換器的電機驅動系統模型Fig.1 Model of the motor drive system based pre-BUCK converter
則在此工作點處的切線方程為
(3)
其中,令:
(4)
則有
(5)
由式(5)可知恒功率負載可以等效為一個負電阻RCPL和一個恒流源ICPL的并聯電路,其中恒流源ICPL為常數值,不會對系統的穩定造成影響,負電阻RCPL會使系統產生兩個右半平面極點從而造成系統不穩定,這就是恒功率負載的復阻抗特性。另外,假設電網電壓穩定,忽略輸入電壓波動以及整流橋的損耗和壓降的影響,則可以近似認為BUCK斬波電路的前級電壓Vin為常數,即為一個恒壓源。由此可知圖1(a)可以簡化為圖1(b)所示的系統模型。由于斷續電流模式(DCM-discontinuous current mode)帶CPL負載是穩定的[20],因此著重研究連續電流模式(CCM-continuous current mode)下系統的穩定性。忽略控制量占空比d的波動,則在CCM模式下可以進一步簡化為如圖1(c)所示的模型。其中dVin為直流側前級可控電源,L為濾波電感,C為濾波電容,RL和RC分別為L和C的串聯等效電阻(ESR-equivalent series resistance),RCPL為CPL的等效負電阻,ICPL為CPL的等效電流源,iL為電感電流,iC為電容電流,vC為電容電壓,則圖1(c)所示的電路方程可寫為:
(6)
由式(6)得到系統的傳遞函數為

(7)
式中:a0=LCRCPL+LCRC;a1=CRCRCPL+CRCRL+CRCPLRL+L;a2=RL+RCPL。
由式(7)可得到系統的極點

(8)
由式(8)可知,若當式(8)中分子根號內的部分大于零時,系統有兩個實根,且在實際應用中通常有
|RCPL|>RC。
(9)
因此式(8)的分母符號為負,若使系統穩定需
CRCRCPL+L+CRCRL+CRLRCPL<0。
(10)
則系統有兩個位于復平面左半平面的極點,若當式(8)中分子根號內的部分小于零時,系統有一對共軛復根,使系統穩定同樣需要滿足式(10),才能得到兩個復平面左半平面的共軛復根,因此,系統穩定的條件即為式(10)。由式(10)可得
(11)
則系統穩定的條件為式(9)和式(11),結合式(4),令Vo為vo的均值,則有
(12)
式(12)為系統穩定工作的條件,由式(12)得到的功率P為當前參數下穩定驅動的恒功率負載的最大功率。將表1中的數據代入式(12),得到穩定的最大功率值為61.18 kW,由于實際電路中雜散電感的影響,實際的最大穩定輸出功率值比式(12)計算得到的理論值低。
結合式(6)可得系統結構框圖如圖2所示,圖中vref為控制電壓參考值,vo為控制電壓實際值,Vtr=5 V為三角載波的幅值,GPI為反饋控制器,其表達式為KP+Ki/s,其中KP和Ki分別為比例系數和積分系數。
基于表1所示的參數,對圖2所示的系統做出輸出負載功率P從10 kW到100 kW時的Bode圖和極點分布圖如圖3所示。

圖2 帶CPL負載的BUCK變換器的系統結構框圖Fig.2 Control scheme of BUCK converter with CPLs
圖3(a)為系統Bode圖,由圖可知,隨著功率的升高,系統的幅頻特性在轉折頻率處的頻率響應峰值逐漸增大,系統穩定性逐漸變差,直到功率為61.18 kW時達到臨界穩定,繼續升高則系統失穩。圖3(b)為系統極點分布圖,由圖中可知,隨著功率的升高,系統的極點逐漸靠近虛軸,當功率為61.18 kW時,極點位于虛軸上,系統處于臨界穩定狀態,繼續升高功率,則極點位于復平面右半平面,系統失穩。
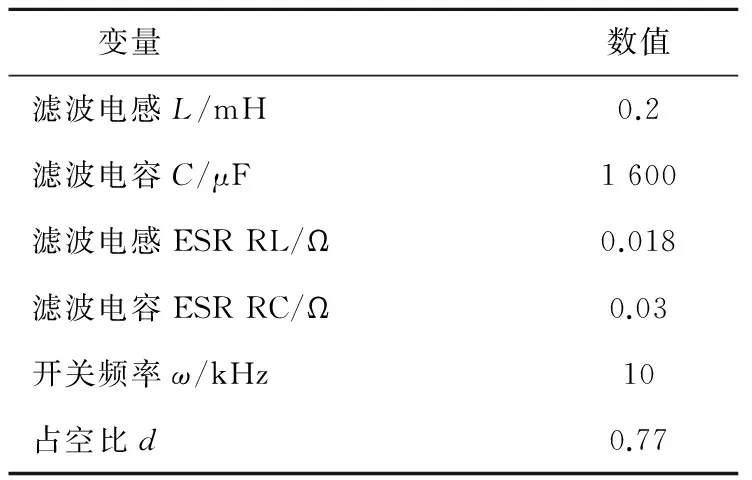
表1 實驗電路參數與控制參數

圖3 負載功率P由小增大時系統的Bode圖和極點分布圖Fig.3 Bode plot and the poles distribution of the system when the power of the load increasing
2 消除復阻抗特性提高穩定性方法
一些研究表明,采用阻尼補償網絡,即在轉折頻率處增加阻尼的方法可以提高系統穩定性,從而提高系統的穩定輸出功率[5-7]。然而這些方法都是通過增加硬件網絡從而重新配置系統極點以滿足穩定性要求,因此會增加額外的硬件損耗,使系統效率降低,并且整體系統的體積重量均有所增加,不適合較大功率負載的驅動系統。

由式(12)可知調整RC、RL效果相似,以RL為例,由式(11)得
(13)

(14)
令RLact為實際的電感ESR值,則由式(13)、式(14)可知,使系統穩定而需要增加的電感ESR值ΔRL需滿足
ΔRL>RLmin-RLact。
(15)
如果將等值電阻與電感串聯則可以使系統在此工作點處穩定,然而這樣會增加系統的損耗,所增加的損耗為

(16)
當電機工作在滿載額定轉速時,結合表1參數可得增加的損耗ΔP為1 387.7 W,大大降低了系統整體效率。采用RC為調整參數的分析過程與之相似,可以得到類似結果。
因此,采用一種不增加硬件的虛擬阻尼的方法提高系統穩定性。基于以上分析可知,適當提高RL和RC都可以增加系統的帶載能力,但是由圖2可知,RC直接對輸出電壓產生影響,不便于在控制端反饋調節,因此選用RL為調整參數。先將iL值測量引出,然后引入一個虛擬補償系數Rcpt,二者求積之后將其反饋至控制器,與反饋控制器的輸出做差之后產生占空比d的控制量。可知虛擬增加的濾波電感ESR值ΔRL由式(17)得到,令k為補償系數增益,則虛擬補償系數計算公式為式(18)。
(17)
(18)
由上面分析可知,虛擬阻尼補償法第一步由式(4)確定當前工作點處系統的恒功率負載阻值RCPL;第二步由式(14)得到系統在當前工作點穩定的濾波電感ESR值邊界值RLmin;第三步由式(15)確定需要增加的最小的電感ESR的差值ΔRL;如果第三步中得到的ΔRL<0,則說明系統穩定,不啟用阻尼補償,相反則說明系統不穩定,啟動阻尼補償,由式(18)得到虛擬補償系數Rcpt。
在第三步中所確定的電感ESR的差值ΔRL是使系統穩定工作的最小值,為使系統具有足夠大的相對穩定性,需要在此基礎上選取較大的ΔRL值,參數整定方法如下。
三是水工程建設和管理仍相對滯后。盡管我國已初步形成了蓄引提調相結合的水資源配置格局和基于大江大河干流的防洪減災體系,但洪災水患問題和工程性缺水仍普遍存在,水利投入仍存在較大缺口。農田水利、中小河流治理、農村飲水安全工程、小型水庫病險率高等問題突出,亟待加強專項治理。
首先由式(14)計算得到邊界值RLmin,令補償系數增益k=1,帶入式(18)得到當前工作點的邊界補償系數Rcpt,然后由式(19)求得當前參數下系統的諧振峰值Mr,其中ξ為補償之后整個系統傳遞函數的阻尼系數,結合式(18)和后面給出的式(24),可推導出其表達式為式(20),若未達到期望值Mrref,則加大補償系數增益k,直至獲得期望值,從而確定最終的補償系數。

(19)

(20)
為獲得較好的相對穩定性,工程經驗中通常選取Mr<1.4[21],因此選取諧振峰值期望值Mrref=1.4。選取濾波電容C為600 μF,其它參數和表1中一致,當分別令補償系數增益k=1和6.5時,系統Bode圖如圖4所示,從圖中可知,選取較小容值濾波電容時系統不穩定,當開啟虛擬阻尼補償時系統穩定,且隨著補償系數增益k的增大,諧振峰值減小,系統相對穩定性明顯提高,由此可知該參數整定方法有效,且在同等條件下可以選取較小的濾波電容。
值得注意的一點是,由于虛擬增大了濾波電感的ESR值,此時輸出電壓的穩定值會產生一個額外的壓降vdrop
vdrop=(RLmin-RLact)iL。
(21)
按照表1中的參數計算當前工作點處系統穩定,虛擬補償法未起作用,輸出壓降為0 V。當濾波電容C選為600 μF,其它參數和表1中一致,則壓降為11 V左右,則在當前工作點處轉速相差約680 r/min。此輸出壓降是由于iL反饋值的直流分量引入了控制器所造成的,實際上,在LC的諧振頻率f處產生的振蕩是引起系統輸出不穩定的根本原因,諧振頻率由式(22)得到,因此只要在諧振頻率f附近將iL反饋值引入控制器就可以避免由其直流分量引起的輸出電壓降低的現象,因此在iL反饋環節加入帶通濾波器Gb(s),其計算公式由式(23)得到。
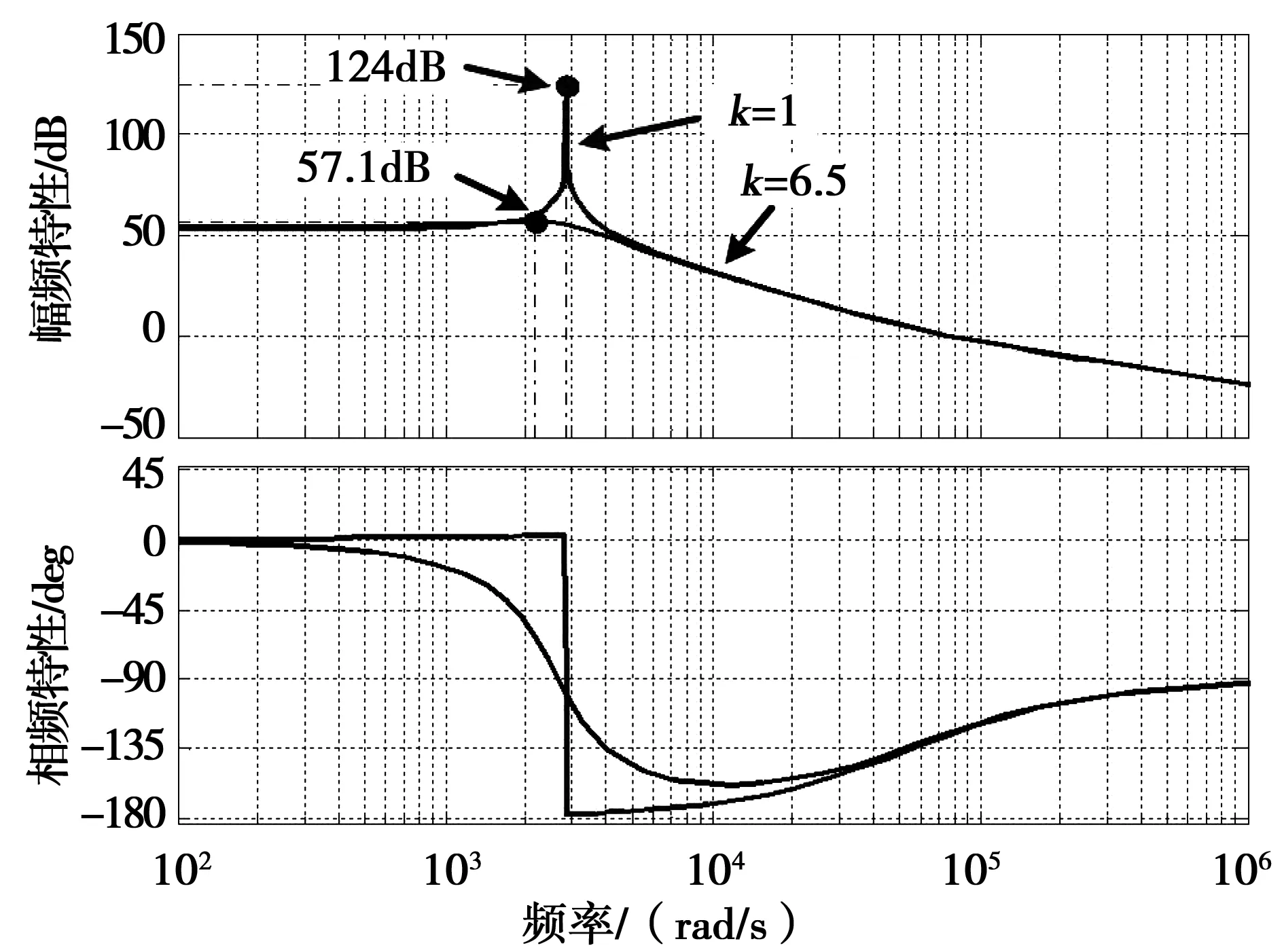
圖4 應用虛擬阻尼補償法后的系統Bode圖Fig.4 Bode plot of the system after employing virtual damping compensate method

圖5 帶通濾波器Gb(s)在不同阻尼比ξc下的Bode圖Fig.5 Bode plot of the BP filter Gb(s) with different damping ratio ξc
(22)

(23)
式(23)中ξc和ωc分別為帶通濾波器的阻尼比和中心頻率。選取濾波電容C為600 μF,則諧振頻率f為459 Hz,令ωc=459 Hz,則Gb(s)在不同的阻尼比ξc下的幅頻特性如圖5所示,可知Gb(s)在頻率ωc處無衰減,在低頻段和高頻段有良好的幅值衰減,說明此BP濾波器可以無衰減的通過諧振頻率,同時可以很好的阻隔直流分量和高頻噪聲通過。為了保證在諧振頻率附近有足夠的帶寬,同時在低頻段和高頻段有足夠的衰減幅值,選取阻尼比ξc=0.7。
由上述分析可知,應用虛擬阻尼補償法之后的系統結構框圖如圖6所示,由圖中可知,改進后系統的傳遞函數為

(24)
式中,特征方程Δ為
Δ=(RCPL+RC)LCs2+[CRCRCPL+
CRCRL+CRCPLRL+L+

(25)
結合式(25)和式(8)可得改進后系統的極點,可知當選取合適的Rcpt值時,可以將系統的極點配置到復平面左半平面,從而抵消動態復阻抗特性,使系統穩定并具有一定的相對穩定裕量。
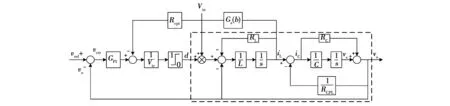
圖6 采用虛擬阻尼補償法后帶CPL負載的BUCK變換器系統結構框圖Fig.6 Control scheme of BUCK converter with CPLs after employing virtual damping compensate method
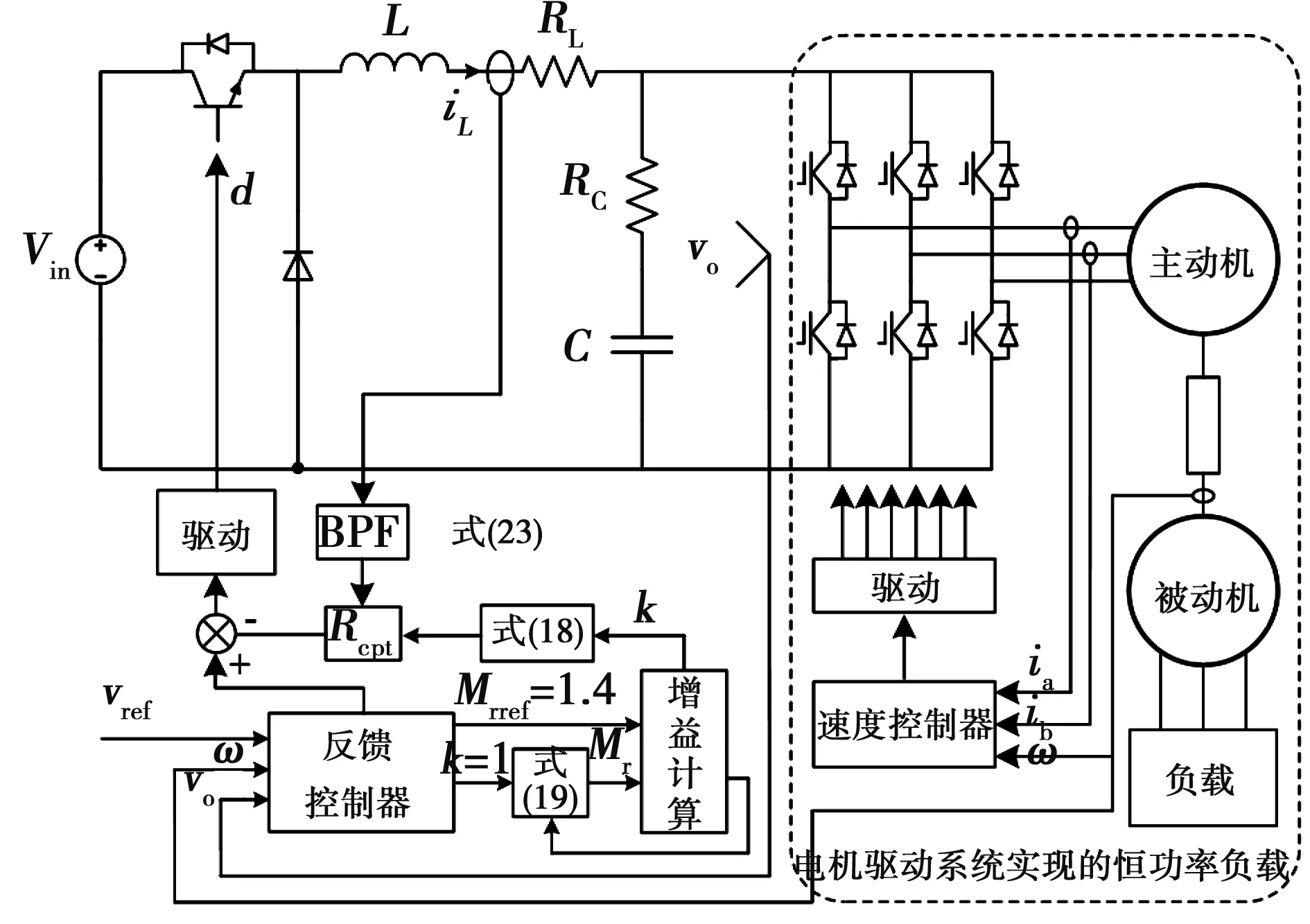
圖7 仿真和實驗平臺系統結構圖Fig.7 System scheme of simulation and experiment
3 仿真與實驗
3.1仿真驗證
為了驗證上述理論分析的正確性,在Matlab環境下搭建了如圖1所示的仿真平臺,其整體系統結構圖如圖7所示,其中電容C為600 μF,其余參數按照表1設置,結合上節所述方法,分別在輸出功率為60 kW和100 kW時選擇不同的虛擬補償系數增益k,系統頻率相應曲線如圖8所示,由圖中可知,當k=0即未開啟虛擬阻尼補償時,系統處于不穩定狀態;當k=1即虛擬阻尼補償系數為最小值時,系統穩定但諧振峰值Mr很大,系統的相對穩定裕量較小;當k值為整定之后的值時,系統穩定并具有較小的諧振峰值。
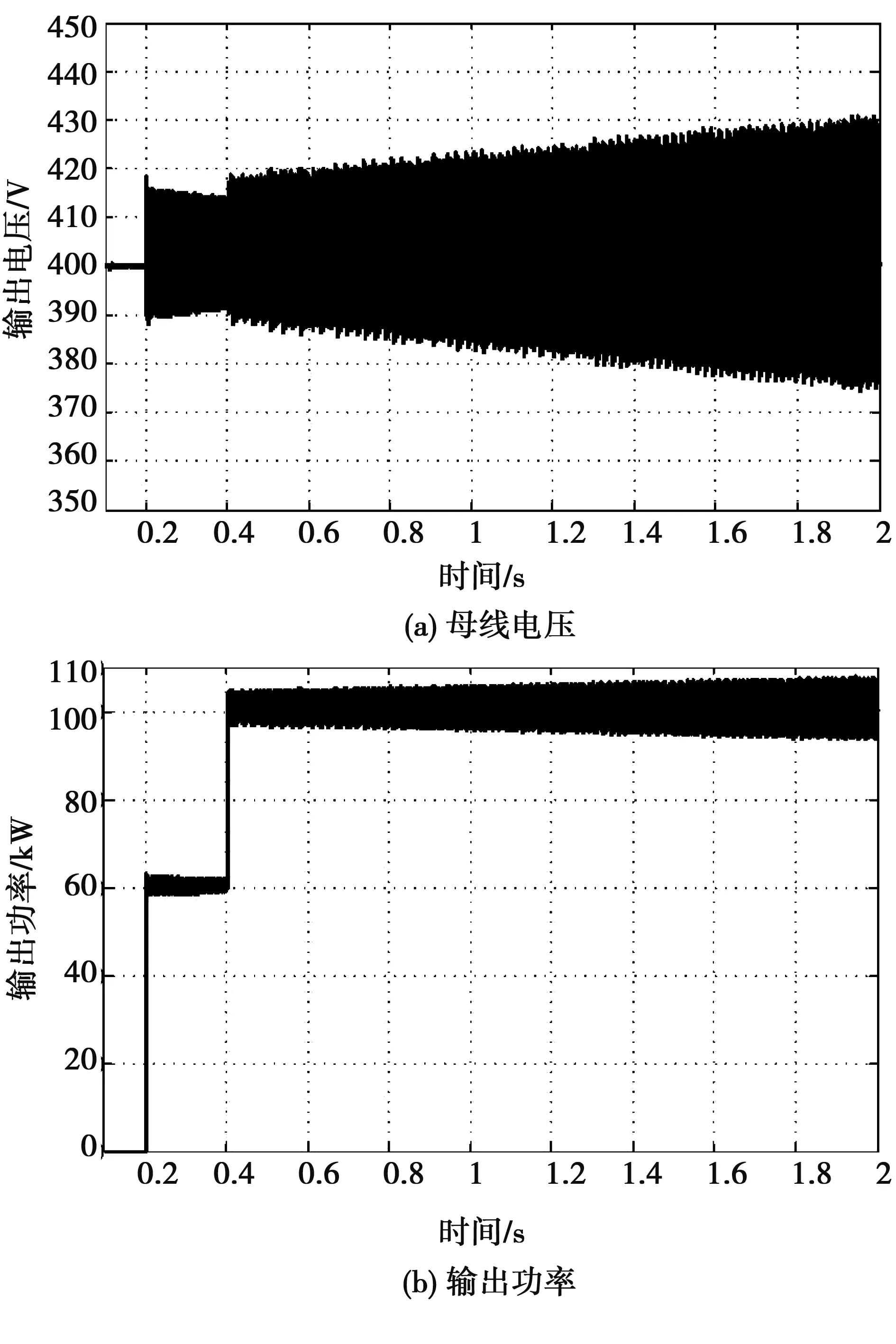
圖9 未使用虛擬補償法仿真結果Fig.9 Simulation results before virtual damping compensating
仿真時先將母線電壓升至400 V,然后增加負載功率,在0.2 s時負載由0切換至60 kW,在0.4 s時切換至100 kW,按照輸出功率60 kW計算,則臨界Rcpt的值為0.000 95。如在加載的過程中Rcpt值固定不變,則仿真結果如圖9所示,由圖中可知第一次切換后母線電壓有收斂趨勢,可知此時系統還處于穩定狀態,第二次切換后母線電壓和輸出功率都開始發散,系統逐漸崩潰;同等條件下應用第二節中所述的方法整定虛擬補償系數增益k值從而得到不同的虛擬阻尼補償系數Rcpt,仿真結果如圖10所示,由圖中可知系統在100 kW以內母線電壓都很穩定,紋波值在3.8%以內。
3.2實驗驗證
按照圖1所示的系統結構圖搭建實驗平臺如圖11所示,由圖可知實驗平臺由控制系統、基于前置BUCK調壓的電機驅動系統和基于兩臺永磁電機的對拖系統組成,其中控制系統主要基于DSP(TMS320F28335)和FPGA(XC2S200E)構成的,對拖實驗平臺由兩臺永磁電機構成,一臺作為電動機(主動機),另一臺作為發電機(被動機),兩臺電機由柔性聯軸器聯接,發電機外接電阻箱,通過切換電阻箱的功率檔而選擇負載功率,實驗平臺參數與仿真參數一致。實驗所用永磁電機參數如表2所示。
圖10 使用虛擬補償法仿真結果Fig.10 Simulation results after virtual damping compensating

變量數值極數4額定功率/kW100額定電流/A218額定轉速/(r/min)32000轉動慣量/(kg·m2)0.024
實驗中逐步提高母線電壓,電機轉速隨之升高,為確保安全運行,在升速過程中逐步加載,當母線電壓升至400 V時,電機轉速升至20 000 r/min,此時負載加至50 kW,此時使母線電壓保持不變,小幅加載,當加至60 kW時母線電壓紋波增大,如繼續加載系統即趨于失穩,實驗波形如圖12(a)所示。當在50 kW切換至虛擬阻尼補償法時,繼續加載至60 kW,母線電壓紋波減小,實驗波形如圖12(b)所示。由實驗結果可知,采用虛擬補償法后系統的穩定域增大,帶載能力增強。由于負載箱已經切換至滿檔,如要繼續加大功率只能提高電機轉速,但是實驗所用的磁懸浮電機在20 000 r/min時已進入撓性模態區,如果繼續升速則有可能轉子撞邊失穩,導致系統故障,因此未繼續升速加載實驗。

圖9 補償前后60 kW直流母線電壓實驗波形Fig.9 Experimental results of the bus voltage with the load of 60kW before and after compensating

圖10 補償前后60 kW輸出功率實驗波形Fig.10 Experimental results of the power before and after compensating
4 結 論
閉環控制的電機驅動系統具有恒功率負載的負阻抗特性,本文針對基于前置BUCK調壓的永磁電機驅動系統,首先建立了系統模型,其次分析了影響系統穩定性的因素和穩定條件,在此基礎上提出了一種基于虛擬阻尼補償法的控制策略,并給出了補償系數的設計流程,最后搭建了實驗平臺并驗證所提出方法的有效性。仿真和實驗結果都表明,對于一個給定的前置BUCK的恒功率負載系統,合理選擇虛擬補償系數,可以在不增加系統損耗的情況下增大系統的穩定范圍,同時在較小容值濾波電容的前提下獲得很好的相對穩定性,大大提高了系統帶恒功率負載的能力。
[1]RIVETTA C, WILLIAMSON G A,EMADI A. Constant power loads and negative impedance instability in sea and undersea vehicles: statement of the problem and comprehensive large-signal solution[C]//IEEE Electric Ship Technologies Symposium, 2005: 313-320.
[2]PIERRE M,BABAK N,SERGE P.General active global stabilization of multiloads DC-power networks[J].IEEE Transactions onPower Electronics, 2012, 27(4):1788-1798.
[3]MOHAMED Y A,RADWAN A A,LEE T K. Decoupled reference-voltage-based active DC-link stabilization for PMSM drives with tight-speed regulation[J].IEEE Transactions on Industrial Electronics, 2012, 59(12):4523-4536.
[4]王建華, 張方華, 龔春英, 等. 帶恒功率負載的DC/DC變換器起動過程分析[J]. 電工技術學報, 2009, 24(4): 121-125.
WANG Jianhua, ZHANG Fanghua,GONG Chunying, et al.Start-up process analysis of DC/DC converter withconstant power Load[J]. Transactions of China Electrotechnical Society, 2009, 24(4): 121-125.
[5]LIU Xinbo, ZHOU Yuanjun,ZHANG Wei, et al. Stability criteria for constant power loads with multistage LC filters[J]. IEEE Transactions on Vehicular Technology, 2011, 60(5):2042-2049.
[6]劉欣博, 周元鈞, 張巍.具有阻尼濾波器的恒功率負載系統在大擾動下的穩定性[J].電工技術學報, 2011, 26(1):154-160.
LIU Xinbo, ZHOU Yuanjun, ZHANG Wei. Large signal stability criteria for constant power loads with damped filters[J].Transactions of China Electrotechnical Society, 2011, 26(1):154-160.
[7]MAURCIO C,LEI Xing,JIAN Sun.Constant-power load system stabilization by passive damping[J]. IEEE Transactions on Power Electronics, 2011, 26(7): 1832-1836.
[8]ERICKSON R W. Optimal single resistors damping of input filters[C]//Proceedings of the Applied Power Electronics Conference and Exposition, 1999: 1073-1079.
[9]LIUTANAKUL P,AWAN A B,PIERFEDERICI S,et al. Linear stabilization of a DC-bus supplying a constant power load: a general design approach[J].IEEE Transactions on Power Electronics, 2010, 25(2):475-488.
[10]AMIR M R,ALI E. Active damping in DCDC power electronic converters: A novel method to overcome the problems of constant power loads[J]. IEEE Transactions on Industrial Electronics, 2009, 56(5):1428-1439.
[11]PIERRE M,DIDIER M,BABAK N,et al.Large-signal stabilization of a DC link supplying a constant power load using a virtual capacitor impact on the domain of attraction[J].IEEE Transactions on Industrial Applications, 2012, 48(3):878-887.
[12]張旭輝, 溫旭輝, 趙峰. 抵消恒功率負載負阻抗特性影響的雙向Buck/Boost變換器控制策略[J].電工技術學報, 2013, 28(11):195-228.
ZHANG Xuhui, WEN Xuhui, ZHAO Feng. The control scheme counteracting negative impedance of constant power load for bi-directional buckboost[J]. Transactions of China Electrotechnical Society, 2013, 28(11):195-228.
[13]THIERRY B, NICOLAS L,BABAK N,et al. Synchronous demodulation of control voltages for stator interturn fault detection in PMSM[J]. IEEE Transactions on Power Electronics, 2013, 28(12):5647-5654.
[15]LIN F, HUNG Y,HWANG J, et al. Fault-tolerant control of a six-phase motor drive system using a takagi-sugeno-kang type fuzzy neural network with asymmetric membership function[J].IEEE Transactions on Power Electronics, 2013, 28(7):3557-3572.
[16]紀歷,徐龍祥.高速永磁同步電機無傳感器控制[J].電機與控制學報, 2011, 11(9):24-30.
JI Li, XU Longxiang.Sensorless control of high speed permanent magnet synchronous motor[J]. Electronic Machines and Control, 2011, 11(9):24-30.
[17]FANG Jiancheng, LI Wenzhuo, LI Haitao. Self-compensation of the commutation angle based on DC-link current for high-speed brushless DC motors with low inductance[J]. IEEE Transactions on Power Electronics, 2014, 29(1):428-439.
[18]FANG Jiancheng, ZHOU Xinxiu, LIU Gang. Precise accelerated torque control for small inductance brushless DC motor[J]. IEEE Transactions on Power Electronics, 2013, 28(3):1400-1412.
[19]許建平,牟清波,王金平,等.脈沖序列控制DCM Buck變換器輸出電壓紋波研究[J].電機與控制學報, 2010, 14(5):1-6.
XU Jianping, MOU Qingbo, WANG Jinping, et al.Output voltage ripple of pulse train controlled DCM buck converter[J]. Electronic Machines and Control, 2010, 14(5):1-6.
[20]SUN J, MITCHELL D M, GREUEL M F.Modeling of PWM converters in discontinuous conduction mode—A reexamination[C]//Proc. 29th IEEE Power Electron. Spec. Conf., 1998:615-622.
[21]胡壽松. 自動控制原理[M].北京:科學出版社,2002.
(編輯:賈志超)
Constant power loads system control scheme based on the virtual damping compensation
SONG Xin-da1,2,3,ZHENG Shi-qiang1,2,3
(1.Science and Technology on Inertial Laboratory, Beijing University of Aeronautics and Astronautics, Beijing 100191,China;2.Novel Inertial Instrument & Navigation System Technology Key Laboratory of Fundamental Science for National Defense,Beijing University of Aeronautics and Astronautics, Beijing 100191, China; 3. Beijing Engineering Research Center of High-Speed Magnetically Suspended Motor Technology and Application, Beijing 100191,China)
The motor loads, existing in many industrial fields, behave as constant power loads (CPLs) with negative incremental impendence which may destabilize the system when tightly regulated. In this paper, the stability of BUCK converter with constant power load (CPL) is studied. The model of the motor driving system based pre-BUCK converter was established. The mechanism of the stability impact of the system was analyzed. A new control scheme of neutralizing the negative impedance degenerating the bus voltage based virtual damping compensation was proposed, and the process of compensating coefficient design was given. The simulation and experimental results demonstrate that the proposed method improves the stability of the system with constant power loads.
motor drive; BUCK; constant power load; virtual damping compensation; stability
2015-09-06
國家自然科學基金(61573032)
宋欣達(1981—),男,博士研究生,研究方向為電機驅動、磁懸浮電機控制;
鄭世強(1981—),男,博士,講師,研究方向為磁懸浮電機、磁懸浮控制。
宋欣達
10.15938/j.emc.2016.08.001
TM 355
A
1007-449X(2016)08-0001-09
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32