繞線轉子自起動永磁電機斬波起動控制方法
2016-08-30 06:05:26馮桂宏李慶旭戴思銳王帥張炳義
電機與控制學報 2016年8期
馮桂宏, 李慶旭, 戴思銳, 王帥, 張炳義
(沈陽工業大學 電氣工程學院,遼寧 沈陽 110870)
?
繞線轉子自起動永磁電機斬波起動控制方法
馮桂宏,李慶旭,戴思銳,王帥,張炳義
(沈陽工業大學 電氣工程學院,遼寧 沈陽 110870)
針對繞線轉子自起動永磁電機(WRLS-PMSM)PWM斬波調阻起動控制方法進行研究,通過調節轉子繞組回路外串等效電阻,使起動平均轉矩始終保持在最大值,改善起動性能。將定轉子交流電量和阻抗關系折算到直流斬波控制環節,建立PWM斬波調阻準動態數學模型,推導出斬波占空比與轉子等效外串電阻關系;總結輸出最大合成異步轉矩時的轉子外串電阻與轉速關系,進而得到斬波控制規律;搭建WRLS-PMSM起動性能實驗平臺,將WRLS-PMSM轉子斬波調阻起動與轉子自短路起動、鼠籠轉子永磁電機直接起動性能進行對比分析,發現采用實時最大異步轉矩輸出的轉子斬波起動方法能夠有效提高永磁電機的起動轉矩,抑制起動電流,提高牽入能力。
繞線轉子自起動永磁電機;起動控制;PWM斬波;電阻調節;最大異步轉矩
0 引 言
繞線轉子永磁電機(WRLS-PMSM)具有自起動能力,與傳統鼠籠轉子永磁電機相比,主要區別一方面體現在轉子繞組結構的改變,另一方面可以通過調節轉子外串電阻改變起動過程中的異步轉矩,從而提高起動性能。對于很多定速驅動工況,具有自起動能力的鼠籠轉子永磁電機,相比異步電機和變頻起動永磁電機在穩態性能和系統性價比方面優勢明顯。但是鼠籠轉子永磁電機由于轉子結構的限制,無法兼顧起動初始時刻的異步轉矩和接近同步速時的牽入轉矩,進而造成起動能力不足,對于重載或大轉動慣量負載工況表現的更加明顯。傳統方法通常采用轉子異型槽的方式加強集膚效應,提高起動能力。在鼠籠轉子永磁電機起動性能計算和改進方面,國內外學者進行了很多研究工作。文獻[1-3]采用有限元仿真的方法分析了鼠籠轉子永磁電機的起動特性。文獻[4]提出采用復合材料制造轉子導條,通過優化導條結構和材料特性提高起動性能。文獻[5-7]從電機本體設計和優化算法方面,依據電磁計算模型對主要性能指標進行改進,取得一定效果。文獻[8]采用時步有限元法對鼠籠轉子永磁電機起動過程中的最小轉矩進行計算,為電機起動性能預測提供依據。以上這些研究主要集中在鼠籠轉子永磁電機起動性能計算與提高方面,但是起動與牽入性能的矛盾卻始終存在。為此,文獻[9-10]提出并研究了采用繞線轉子結構的自起動永磁電機,并著重分析了電機磁路結構設計和穩態性能。文獻[11]進一步提出了一種增加轉子弱磁繞組的方法,抑制發電制動轉矩,提高起動能力。采用繞線轉子外串電阻的方法提高起動能力,核心在于起動過程中通過PWM斬波的方法合理調節外串等效電阻。而在斬波調阻方面,傳統異步電機的調速系統已經進行了嘗試,文獻[12]早在上世紀70年代就提出了感應電機的轉子斬波調速方法。在此基礎上,文獻[13]提出了一種抑制關斷損耗的斬波調阻電路,取得較好效果。文獻[14-15]也對繞線異步電機的斬波調速系統進行了研究。
本文在繞線異步電機斬波調速系統的基礎上,結合WRLS-PMSM起動過程中合成異步轉矩隨轉速的變化規律,建立并分析了基于最大實時異步轉矩的斬波起動控制方法,并通過樣機實驗進行了驗證。
1 WRLS-PMSM轉子回路斬波控制模型
WRLS-PMSM定轉子繞組之間雖然沒有直接的電聯系,但通過主磁通實現電磁耦合,這種耦合關系表現在定轉子雙邊電量互相影響。由于斬波控制過程要在轉子整流環節進行,同時考慮到WRLS-PMSM起動過程的復雜性,這里僅建立轉子回路斬波控制準動態數學模型,即將電機從靜止到同步轉速的動態過程分別用穩定運行在不同轉速時的阻抗參數模擬。此法雖然忽略了瞬態電抗和飽和因素,但能計及轉速對電抗的影響,基本可以滿足工程計算需要。本文通過三個步驟完成該模型的建立。
1.1折算到轉子交流側的等效電路


(1)
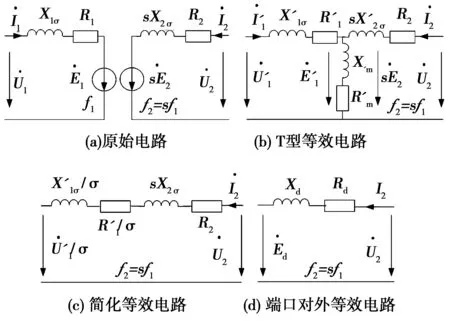
圖1 WRLS-PMSM轉子側每相等效電路Fig.1 Equivalent circuit of each phase of WRLS-PMSM in the rotor side
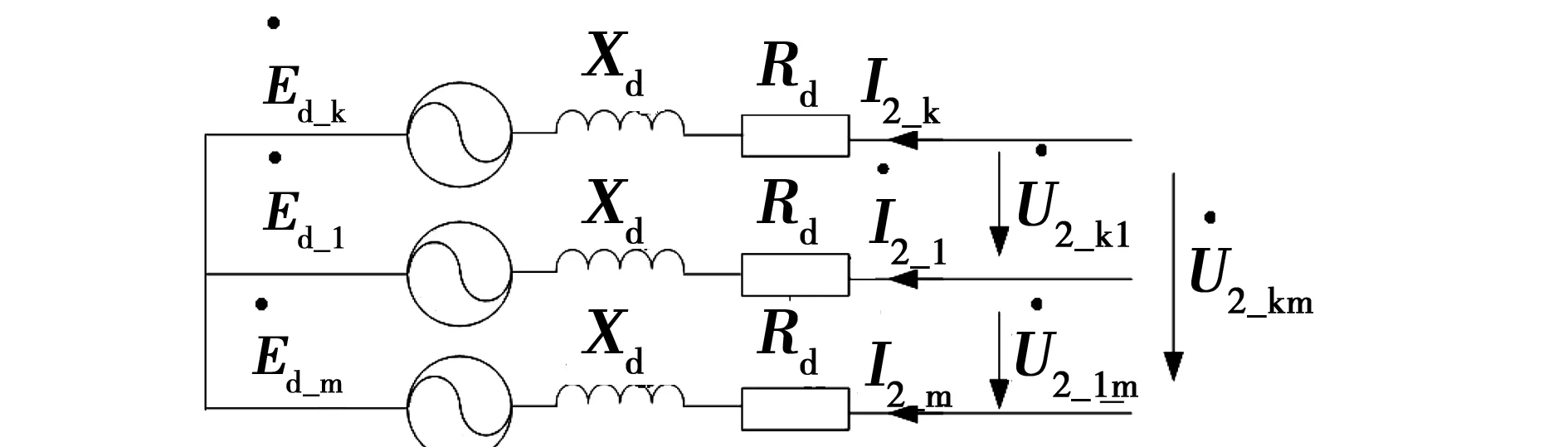
圖2 WRLS-PMSM轉子側三相等效電路Fig.2 Equivalent circuit of three phase of WRLS-PMSM in the rotor side
1.2折算到轉子直流側的等效電路
所涉及的轉子繞組整流環節為三相不可控整流,其自然換向點位于線電壓差值過零點附近。經推導可得不考慮換流損失下的整流電壓為

(2)
由于轉子電感的存在,整流器件在開通關斷過程中不可避免的存在換流環節,實際整流輸出電壓會隨著換流過程持續時間的增加而降低。根據繞線異步電機串級調速系統相關數據,對于不同轉差率和電機阻抗參數條件下,換流重疊角變化范圍在25°~75°之間,這里取平均值γ=50°作為等效換流重疊角。
根據以上分析可知,由于換向帶來的電壓損失可以通過對換流重疊角γ時間段內的電流積分進行計算,可得

(3)
由于轉子三相繞組按照分時導通的原則工作,每個整流周期同時有兩相繞組導通,整流電流在轉子自身繞組電阻上的電壓損耗在折算過程中也需要考慮。由于電機轉子側感抗參數的改變會造成換流過程的不確定性,這里仍取平均值γ=50°。從而可得,由于換流重疊角帶來的轉子電阻壓降如下:

(4)
綜合以上折算參數,可將圖3(a)所示轉子整流電路折算為圖3(b)所示直流側等效電路。圖中等效電抗XD=Xd,等效直流電阻為
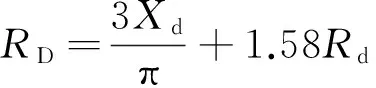
(5)
對外等效端口電壓UD=ED-ΔED_1-ΔED_2,將式(2)~式(4)帶入整理可得

(6)
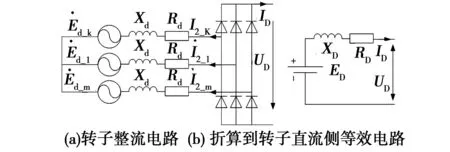
圖3 WRLS-PMSM轉子側折算到整流側等效電路Fig.3 Equivalent circuit converted to the DC side of the WRLS-PMSM in the rotor side
至此,經過定子側至轉子側以及轉子側至整流側的兩次折算,已將原有WRLS-PMSM轉子三相繞組回路電氣參數等效為如圖3(b)所示的直流電壓源和阻抗串聯的端口模型,從而為直流斬波調阻數學模型搭建奠定基礎。
1.3直流斬波調阻模型
直流斬波調阻模型主要包括轉子三相繞組整流網絡、外串電阻以及IGBT斬波環節。通過控制IGBT導通和關斷時間的比例,即可實現外串電阻實際值的連續變化。理想狀態下,IGBT導通時等效電阻為零,IGBT關斷時等效電阻為外串電阻。實際工作中,為避免IGBT快速開通和關斷過程中出現的電壓和電流突變,通常會針對斬波器件增加阻容吸收電路,對于中等功率等級的工況,常用如圖4(a)中的RCD型緩沖電路。在IGBT開通瞬間,緩沖電容C通過R向IGBT放電,使集電極電流略微增加而無法突變;而在關斷瞬間,電容的穩壓作用同樣明顯,從而抑制了du/dt的變化。文獻[13]進一步提出一種可以降低IGBT開通功耗的緩沖電路拓撲結構,如圖4(b)所示。由于單向導通的二極管和阻容吸收電路為串聯關系,電容放電過程無法經過IGBT,只能在緩沖電路內部進行放電,從而抑制了器件開通功耗。
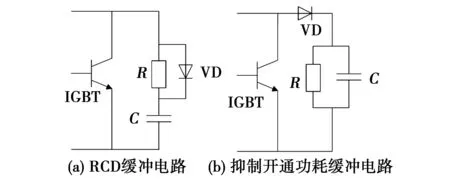
圖4 IGBT關斷緩沖電路Fig.4 Buffer circuit for shut off of IGBT


(7)
式中,Tch=Ton+Toff為斬波周期;Ton對應IGBT導通狀態持續時間;Toff為關斷持續時間;τ1=LD/RD對應導通狀態時間常數;τ2=RefC對應關斷狀態時間常數;τ12=τ1τ2/(τ1+τ2)為合成時間常數;α=Ton/Toff為導通占空比。
以7.5 kW的WRLS-PMSM樣機為例,當轉子外串電阻為7 Ω時,如采用圖4(b)所示緩沖電路,則等效外串電阻與導通占空比存在如圖5所示非線性關系。當電機阻抗參數發生變化時,等效電阻計算模型也隨之改變。
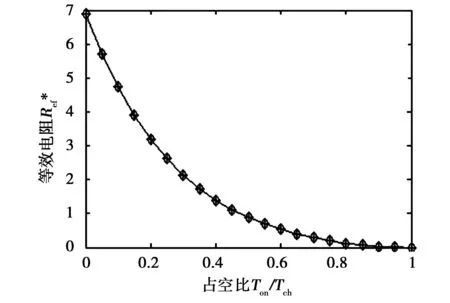
圖5 等效電阻計算模型(抑制開通功耗型緩沖電路)Fig.5 Calculation model of equivalent resistance (Based on buffer circuit with Inhibition consumption)
對于所研究的起動過程斬波控制,由于電機穩態運行時斬波回路不工作,而起動過程瞬間完成,器件開通損耗有限,因此這里采用了基于RCD型緩沖電路的斬波調阻方法,如圖6所示。圖中IGBT能量吸收電阻R和外串電阻Ref相互獨立,因此對外呈現的實際等效電阻與占空比具有較好線性關系。下面分別對IGBT開通和關斷兩種狀態進行分析,如圖7所示。
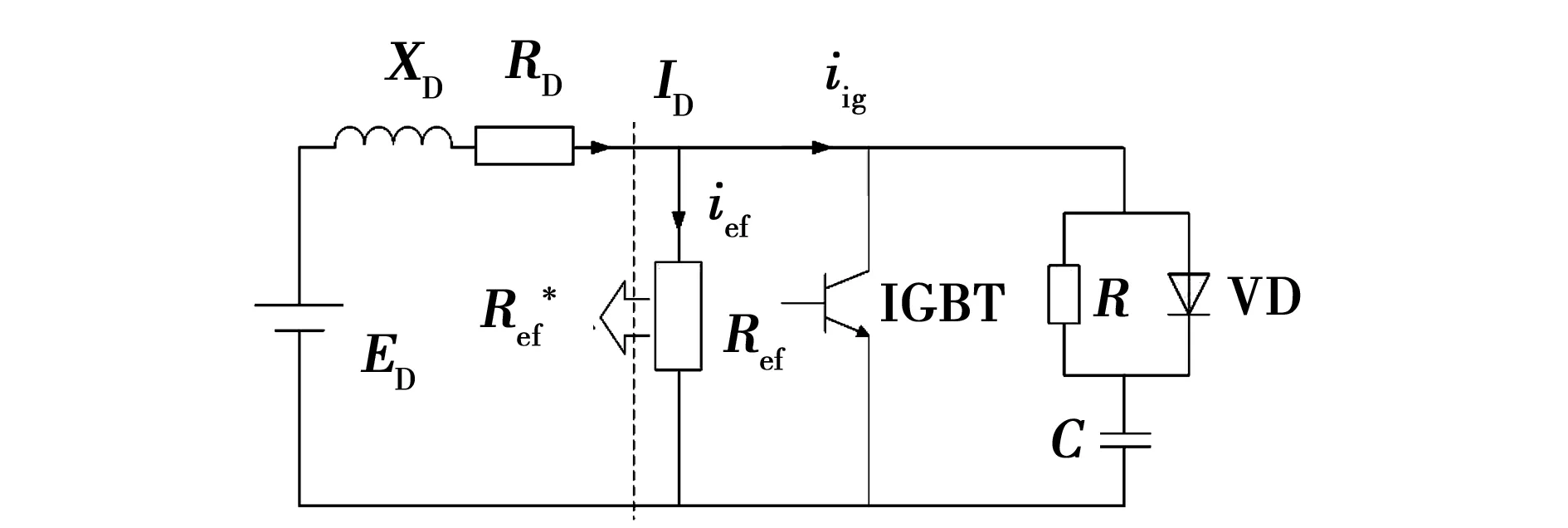
圖6 基于RCD型緩沖電路的調阻電路Fig.6 Adjustable resistance circuit of RCD buffer circuit
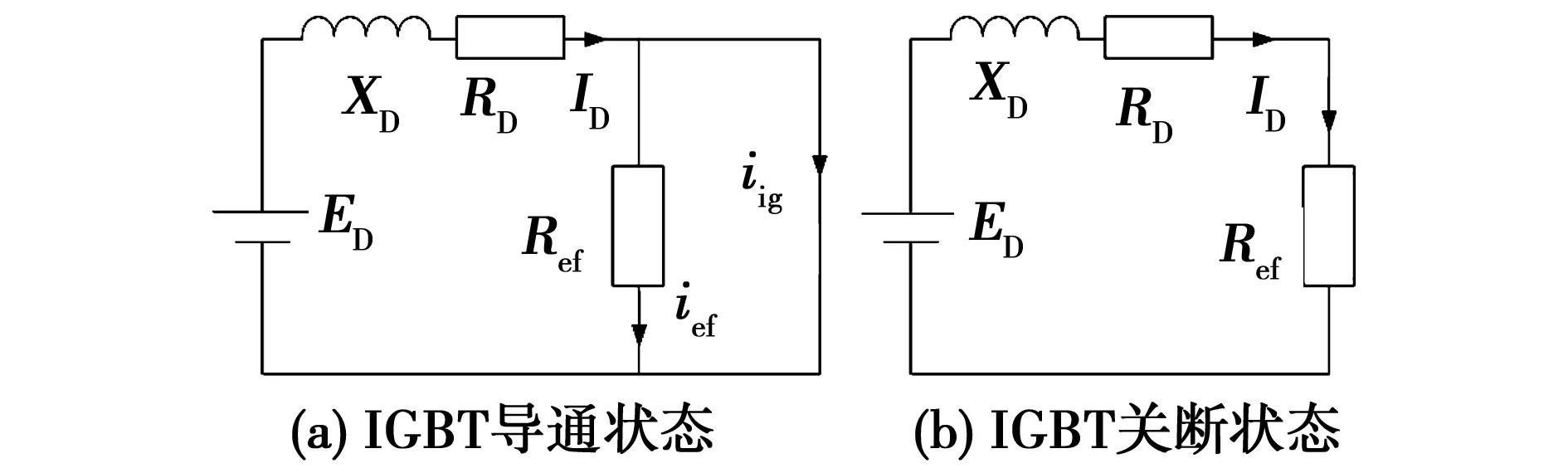
圖7 RCD型緩沖調阻電路兩種工作狀態下等效電路Fig.7 Equivalent circuit of adjustable resistance circuit
當IGBT導通時,Ref被短路,此時參數滿足式(8)。在IGBT從斷開向導通過度的瞬間,回路電阻從RD+Ref瞬間降低至RD,但是由于轉子回路電感LD的抑制作用,電流逐漸在導通周期內由Imin增加至Imax,此階段邊界條件如式(9)。而在關斷周期內,回路電阻又瞬間突變至RD+Ref,電流從Imax逐漸降低至Imin,此時參數滿足式(10),對應邊界條件如式(11),至此完成一次開斷周期。這里雖然忽略了緩沖電路的影響,但后續通過求取電流平均值進而計算等效電阻的方法仍能滿足工程計算需要。

(8)
(9)

(10)
(11)


(12)

(13)

(14)
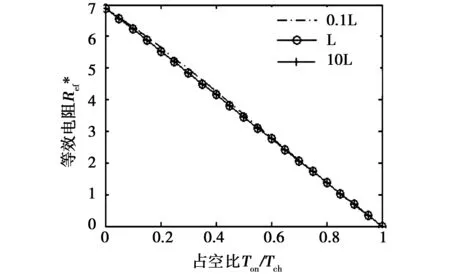
圖8 等效電阻計算模型(RCD型緩沖電路)Fig.8 Calculation model of equivalent resistance(Based on buffer circuit of RCD)
對比圖5和圖8,顯然后者所示等效電阻計算模型更加簡潔。實際斬波過程中,占空比需要根據轉速變化實時調節,如果計算過程過于復雜,就會增加計算量,影響反應速度。更重要的是,當斬波頻率較高時,式(14)對應數學模型中實際等效電阻與占空比呈近似線性關系,如圖9所示。這就避免了電機阻抗參數變化對等效電阻計算模型的較大影響,系統穩定性更好,因此采用基于RCD型緩沖電路的斬波電路,對WRLS-PMSM的起動控制策略進行研究。
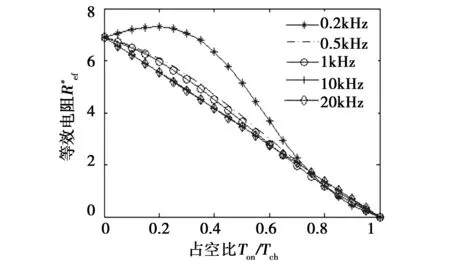
圖9 等效電阻計算模型對斬波頻率的敏感性(RCD型緩沖電路)Fig.9 Sensitivity of calculation model to chopper frequency(Based on buffer circuit of RCD)
2 PWM斬波控制方案設計
2.1總體方案設計
RCD型緩沖電路的斬波調阻系統整體控制結構如圖10所示。系統包括轉子繞組,三相整流單元,斬波電路,阻容吸收電路以及外串電阻。WRLS-PMSM起動過程中的穩定轉矩主要包括發電制動轉矩Tg、正向異步轉矩Ta和凸極效應異步轉矩Tb,發電制動轉矩與轉子繞組無關,將合成異步轉矩Ta+Tb作為被控對象。
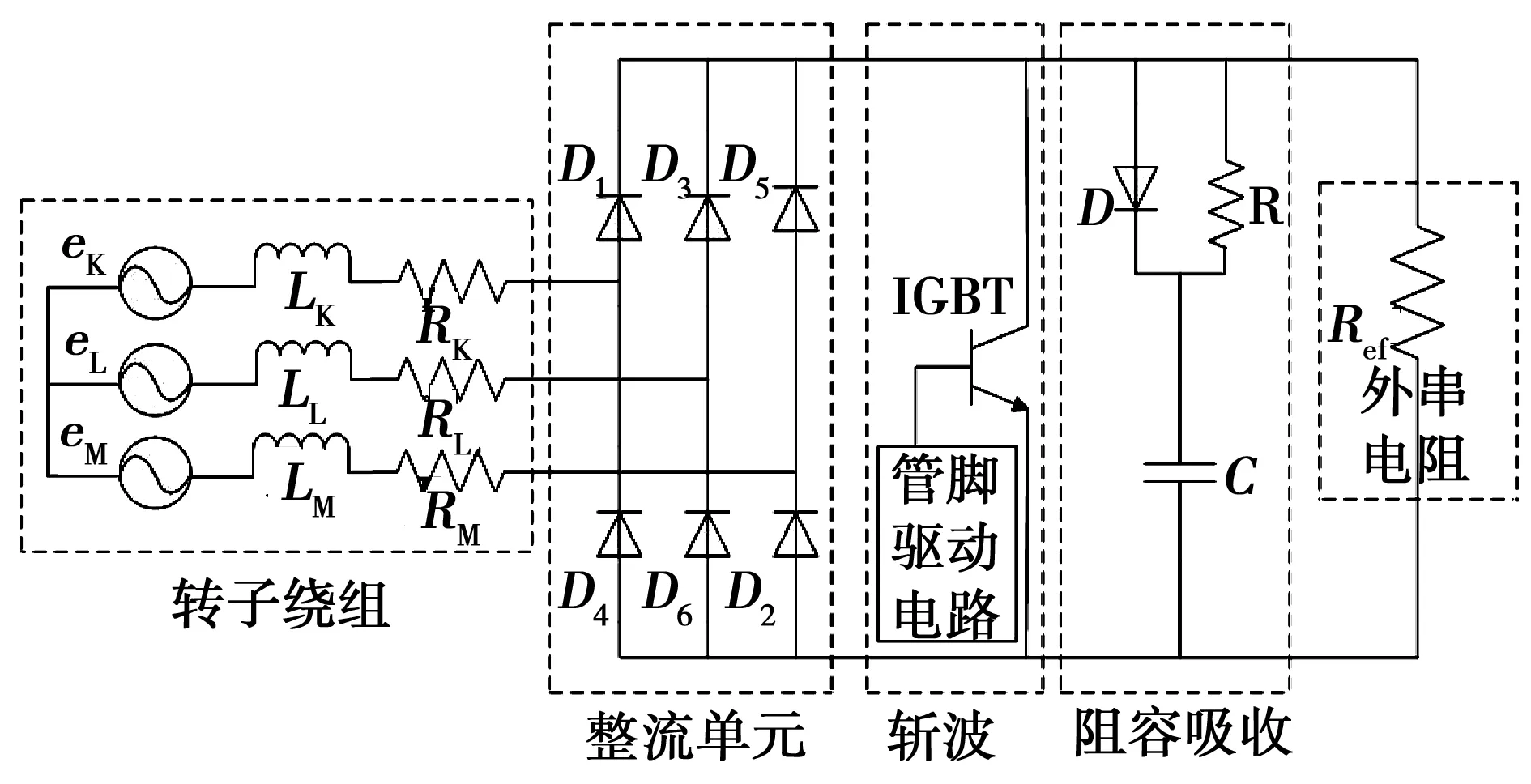
圖10 WRLS-PMSM起動控制系統結構圖Fig.10 Structure of WRLS-PMSM starting control system
根據電機異步運行狀態基本理論可知,在確定轉速下,實時合成異步轉矩對應的電磁功率與轉子繞組銅耗成正比,即滿足Pem=Pcu2/s。轉子回路增加整流和斬波調阻電路之后,實際轉子繞組銅耗除原自身繞組損耗以外,還包括外串電阻損耗。結合圖3可得用于計算WRLS-PMSM合成異步轉矩的準動態數學模型,如圖11所示。對于直流回路,圖11(a)中XD作用消失,進一步得到忽略定轉子漏抗作用的等效電路,如圖11(b)所示。將式(5)進一步整理可得斬波直流回路各電阻分量RD_1,RD_2和RD_3。直流回路合成電阻RD可表示為
(15)

2.2控制方法設計與分析

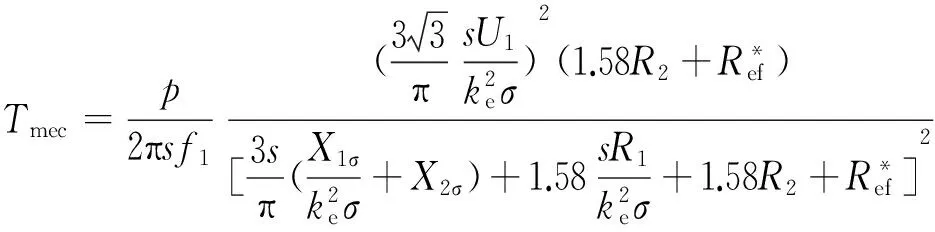
(16)
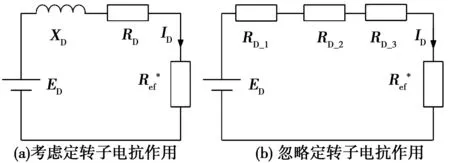
圖11 直流側斬波調阻電路模型Fig.11 Adjustable resistance circuit model in the DC side
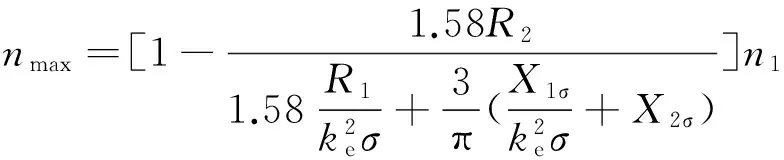
令dTmec/ds=0,得到最大合成異步轉矩對應轉速與定轉子回路阻抗參數的關系為

(17)
如能在起動過程中,將實際運行轉速實時檢測并作為轉子外串電阻計算模型輸入參量,電機即可以最大轉矩且近似為恒轉矩加速至同步速。由于當斬波頻率大于1kHz時,采用RCD緩沖電路的斬波調阻電路中,等效電阻與斬波占空比呈近似線性關系,由此可得到滿足實時最大異步轉矩輸出特性的斬波占空比計算模型為
α=f(n)=

(18)
根據式(18),在高轉速階段所需要的占空比大于1,但實際IGBT斬波工作區僅存在0≤α≤1階段,如圖12中“斬波工作區1”所示。當所需占空比大于1時,IGBT持續導通,強制使得α=1,直至牽入同步轉速。在此階段,轉子外部控制回路失去作用,電機依靠轉子自身繞組完成牽入同步過程。當轉子繞組自身電阻大幅下降時,實際斬波工作區得到拓展,當轉子自身電阻下降到20%時,實際斬波工作區延伸至“斬波工作區2”。轉子繞組阻值越低,斬波工作區越寬。令式(18)中α=1,可得斬波工作周期對應的最高轉速為
(19)
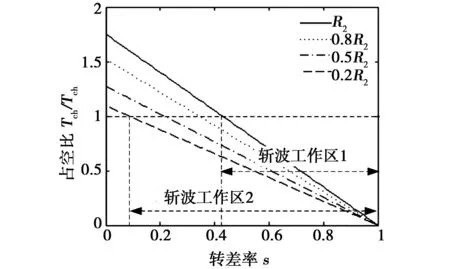
圖12 最大起動轉矩控制α-s曲線Fig.12 The α-s curve in maximum starting torque control
2.3外串電阻選型
根據式(19),可得斬波調阻控制方案中外串電阻的選擇方法,即當轉速為零時所需要的外串電阻達到最大值,其阻值為

(20)
此外串電阻只在起動過程參與工作,其功率等級的選擇需要綜合考慮起動過程功率損耗和工作制情況。外串電阻實時消耗功率與轉差率有關,通過對轉差積分,可得每次起動過程中外串電阻平均損耗功率為

(21)

3 起動特性實驗研究
根據圖10所示的WRLS-PMSM起動控制結構,搭建了基于DSPIC芯片的起動控制電路。根據7.5 kW繞線轉子永磁電機電磁設計方案中轉子感應電壓和電流等參數,確定整流和斬波控制環節器件選型。起動性能測試平臺如圖13。斬波控制電路和WRLS-PMSM樣機主要參數如下:斬波控制電路參數為:編碼器為1024脈沖/轉;整流模塊為1 000 V/300 A;芯片為dsPIC30F5015;IGBT為1 000 V/150 A;外串電阻為5 kW/10 Ω;斬波頻率為10 kHz。WRLS-PMSM參數為:額定功率為7.5 kW;電壓/電流為380 V/13.4 A;頻率/轉速為50 Hz/1 000 r/min;定子/轉子電阻為0.91 Ω/2.32 Ω;定子/轉子漏感為2.74 mH/4.49 mH;定轉子有效匝數比為0.56。
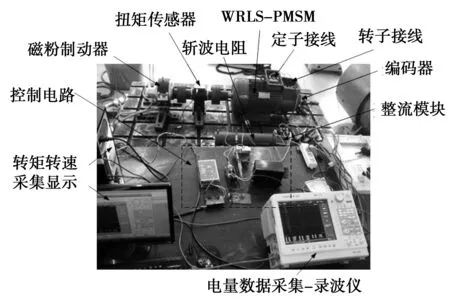
圖13 起動性能測試平臺Fig.13 The starting experiment platform
3.1WRLS-PMSM斬波起動實驗分析
根據上述中所示電機參數,按照式(18)、式(19)中控制模型,對7.5kW的WRLS-PMSM樣機進行斬波起動性能測試。實驗結果表明,在60 kVA調壓器380 V供電條件下,WRLS-PMSM采用轉子繞組自短路直接起動時,最大起動轉矩僅為50 N·m。而采用斬波起動控制時,最大起動轉矩達到90 N·m。圖14為斬波調阻起動時,樣機帶不同負載起動的轉速變化情況。隨著負載轉矩提高,起動時間逐漸延長,但都能牽入同步。由于發電制動轉矩的負面作用和機械慣性存在,起動初始階段存在一定脈動增速現象。
斬波起動過程中,主控芯片預置計算模型,根據轉速信號進行斬波控制。電機從起動至牽入同步過程中,外串電阻呈現斷續導通狀態,如圖15所示。在約120 ms時接收到起動信號,約450 ms時達到理想最高斬波工作速度,此后IGBT持續導通,外串電阻被短路。由于IGBT的存在,轉子整流回路電流仍然持續存在,隨著轉子感應電壓變化電流呈現脈動狀態,至牽入同步后轉子感應電流完全消失,如圖16所示。
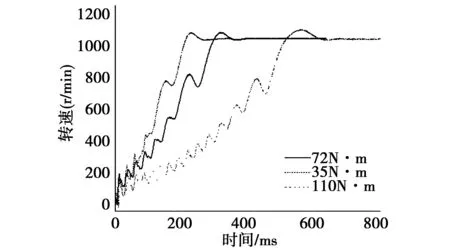
圖14 WRLS-PMSM斬波起動時轉速變化規律Fig. 14 Speed change rule with chopping adjustable resistance of WRLS-PMSM
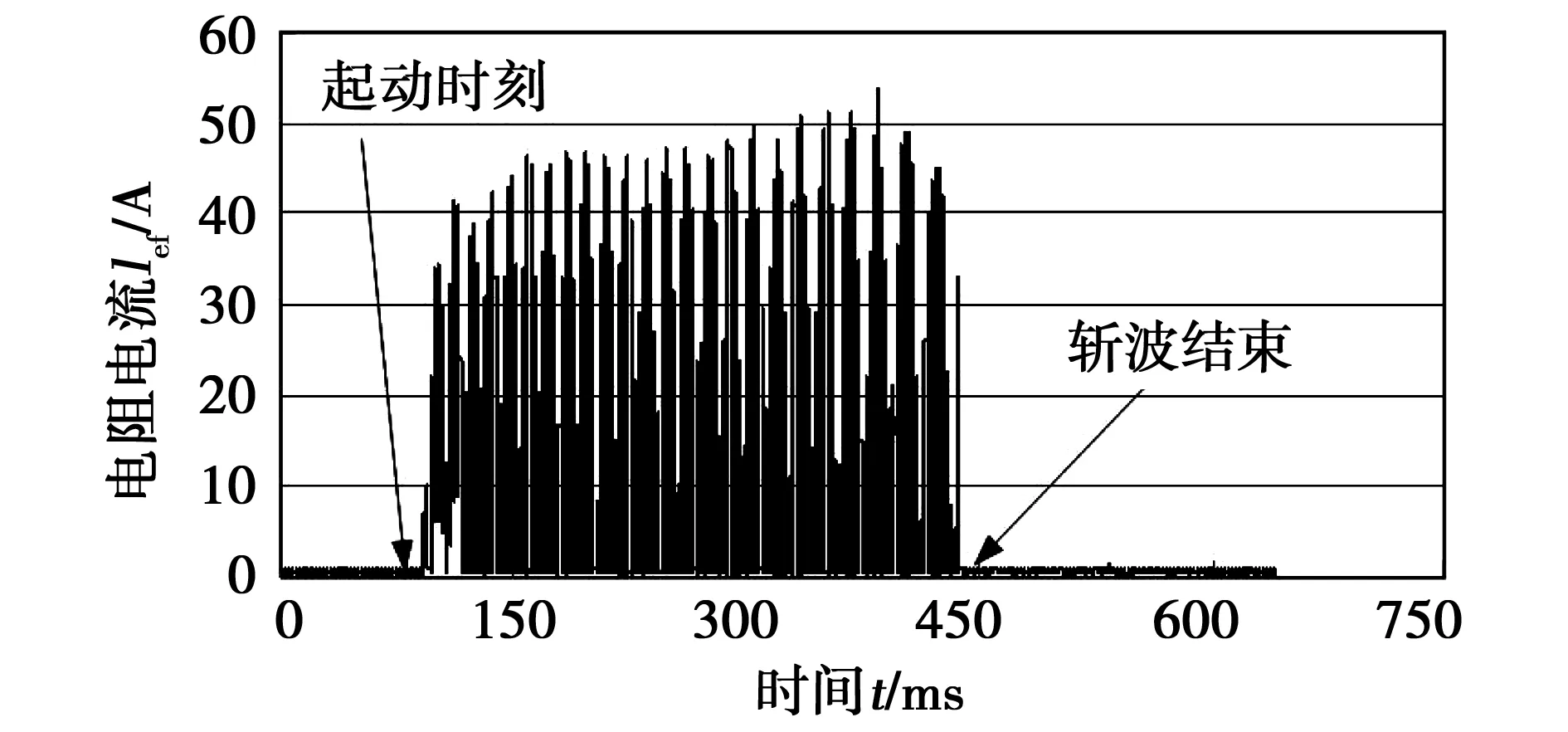
圖15 外串電阻電流(100 N·m)Fig.15 Current of the outer series resistance (100 N·m)
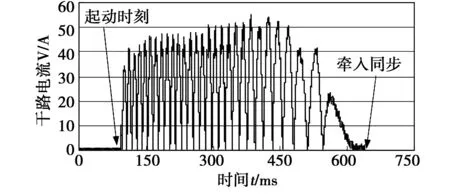
圖16 轉子整流回路電流(100 N·m)Fig.16 Total current of rotor rectifier circuit(100 N·m)
3.2WRLS-PMSM與鼠籠永磁電機對比分析
這里選取了一臺與WRLS-PMSM樣機相同基座號,且功率和轉速也完全相同的鼠籠轉子永磁電機,兩種電機轉子結構如圖17所示。其中鼠籠轉子永磁電機轉子采用梯形槽,充分利用了集膚效應,槽型尺寸和永磁體結構是通過對起動性能優化得到的,基本達到了該型電機的較高起動能力。兩種電機的起動性能實驗條件也完全相同。
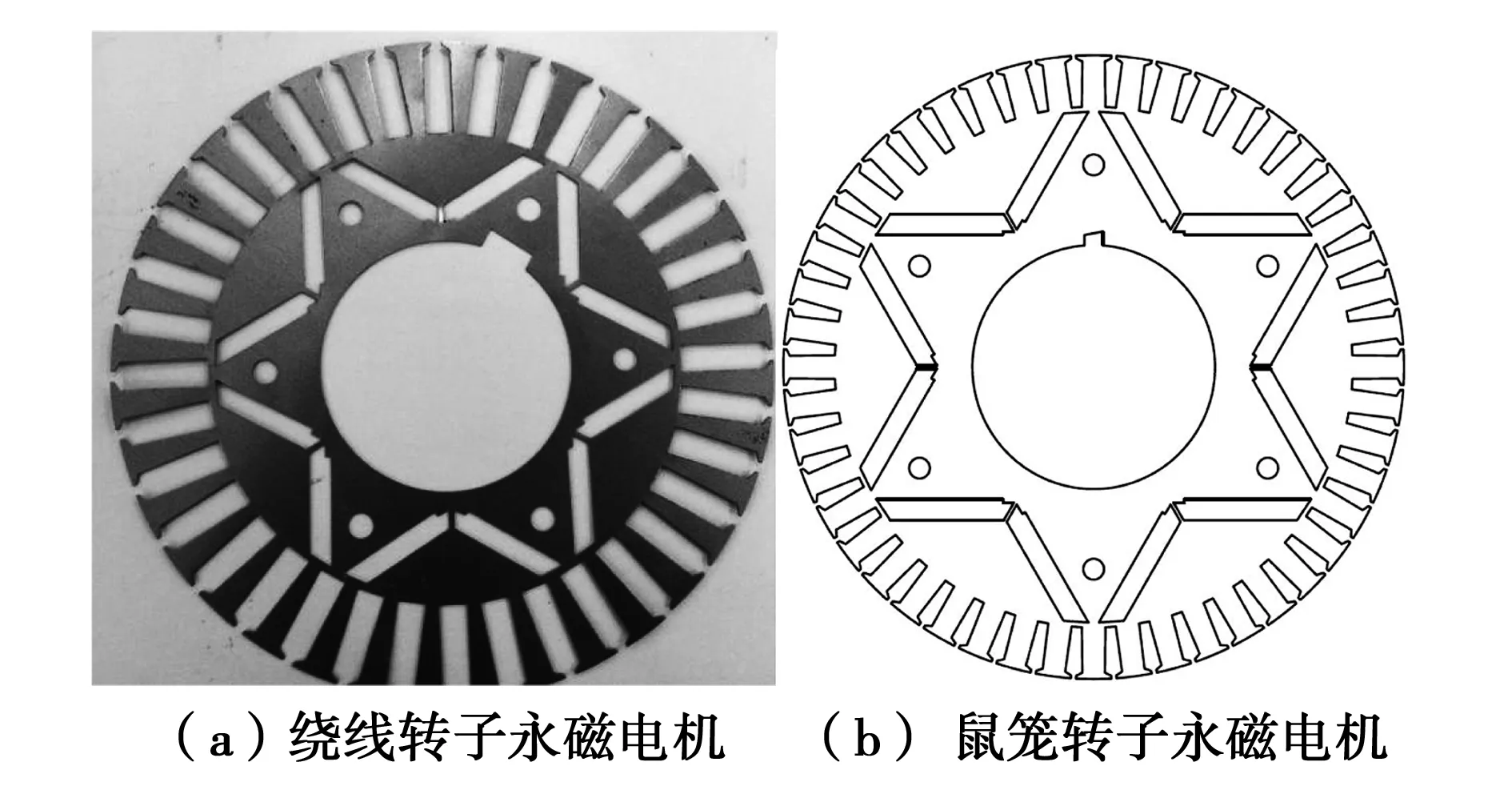
圖17 對比電機轉子沖片結構Fig.17 Rotor laminations of the compared prototype
實驗結果表明,在60 kVA調壓器380 V供電條件下,鼠籠轉子永磁電機最大起動轉矩為45 N~m。圖18對比了WRLS-PMSM帶額定轉矩和鼠籠永磁電機帶最大轉矩時的起動電流變化規律。通過數據處理與折算,可得鼠籠轉子永磁電機的起動電流沖擊約為8.5倍額定電流,而采用斬波起動方法的WRLS-PMSM起動電流沖擊為6.8倍。圖19和圖20為兩種電機起動過程中轉矩和轉速變化規律。從圖19可知,采用斬波起動方法的WRLS-PMSM即使帶滿載起動,相比鼠籠轉子永磁電機,轉矩沖擊更小,合成異步轉矩更大,而這也直接體現在圖20所示的轉速變化過程中,WRLS-PMSM更快進入同步轉速。表1所示為兩種電機在不同控制方式和供電電源條件下的最大起動轉矩。
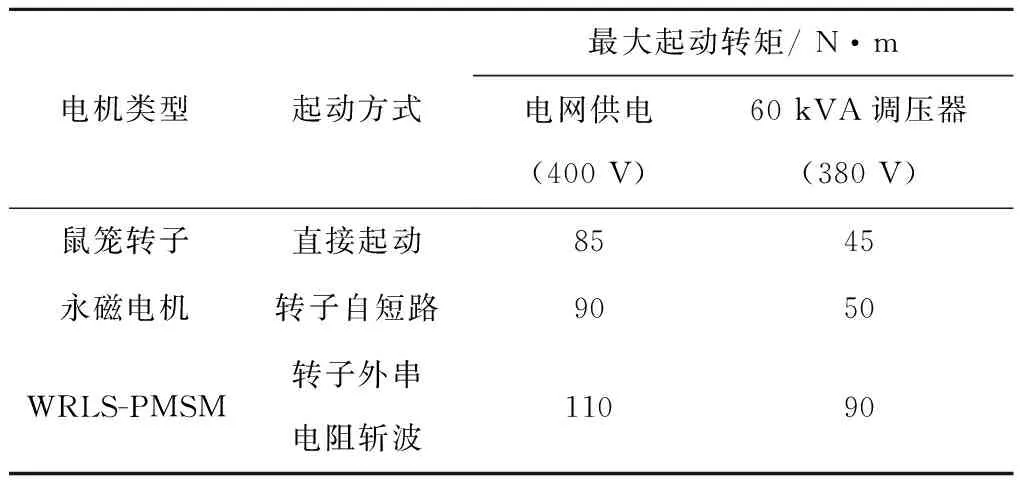
表1 電機最大起動轉矩
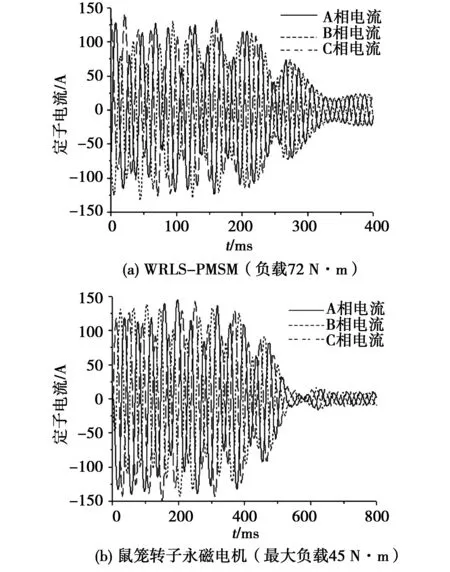
圖18 起動定子電流對比Fig.18 Contrast of stator starting current
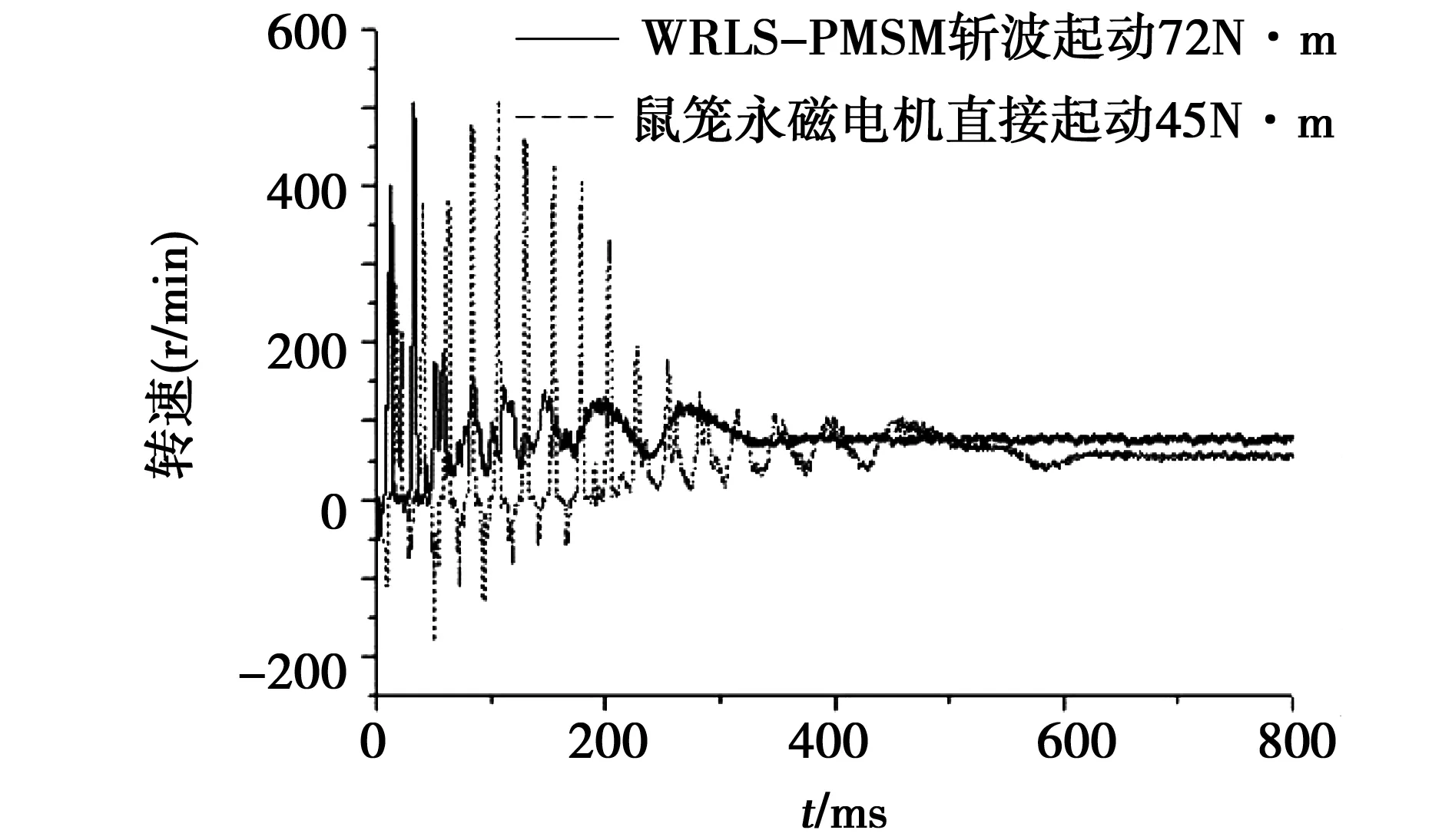
圖19 起動轉矩對比Fig.19 Contrast of starting torque
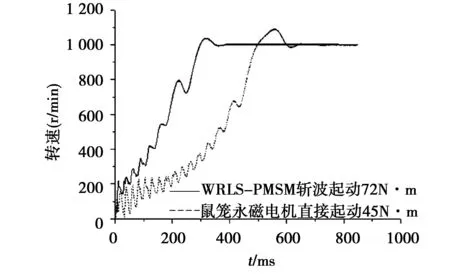
圖20 起動過程轉速對比Fig.20 Speed contrast for starting process
4 結 論
本文研究了繞線轉子自起動永磁電機斬波調阻起動控制方法。將定轉子阻抗參數和電磁關系折算到直流斬波環節,得到兩種基于常見緩沖電路的斬波調阻數學模型,并推導出轉子外串等效電阻與斬波導通占空比的關系。發現基于RCD型緩沖電路的調阻電路中,當斬波頻率較高時,等效電阻計算模型與斬波占空比具有較好的線性關系,參數敏感度低。采用實時最大異步轉矩控制方法的繞線轉子永磁電機,起動轉矩明顯提高,起動電流得到抑制。相比鼠籠轉子永磁電機,起動和牽入能力顯著提高,起動電流抑制效果明顯。
[1]趙猛,鄒繼斌,胡建輝,等. 異步起動永磁同步電動機起動特性研究[J].電工技術學報, 2007,22(7) :145-149.
ZHAO Meng, ZOU Jibin, HU Jianhui, et al. Research on starting characteristic of line-start permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2007, 22(7): 145-149.
[2]ZHOU Ping. Field circuit analysis of permanent magnet synchronous motors[J].IEEE Transactions on Magnetics, 1994, 30(4): 1350-1359.
[3]劉秀君,李偉力,陳文彪.三相異步起動永磁同步電動機起動特性[J].電機與控制學報. 2006, 10(3):269-274.
LIU Xiujun, LI Weili, CHEN Wenbiao. Analysis of starting characteristics of three-phase line-start permanent magnet synchronous motor[J]. Electric Machines and Control, 2006, 10(3): 269-274.
[4]盧偉甫,趙海森,劉明基等.自起動永磁電機復合材料轉子導條的優化[J].電機與控制學報. 2013,17(1):1-6.
LU Weifu, ZHAO Haisen, LIU Mingji, et al. Optimization of the composite material rotor bar for a line-start permanent magnet synchronous motor[J]. Electric Machines and Control, 2013, 17(1): 1-6.
[5]KURIHARA K, RAHMAN MA. High-efficiency line-start interior permanent-magnet synchronous motors[J]. IEEE Transactions on Power Apparatus and Systems, 2004, 40(3): 789-796.
[6]DING Tingting, TAKORABET N, FM S. Design and analysis of different line-start PM synchronous motors for oil-pump applications[J]. IEEE Transactions on Magnetics, 2009, 40(3): 1816-1819.
[7]CHEN Xudong, QIAN Jingen, NI Guangzheng. An improved genetic algorithm for global optimization of electromagnetic problems[J]. IEEE Transactions on Magnetics, 2001, (05): 3579-3583.
[8]張健,羅應立,李和明,等. 確定自起動永磁電機最小轉矩的時步有限元仿真實驗方法[J]. 中國電機工程學報. 2011, 31(21): 102-109.
ZHANG Jian, LUO Yingli, LI Heming, et al.Time-stepping finite element simulation experimental method of determining line-start permanent magnet motor minimal torque[J]. Proceedings of the CSEE, 2011,31(21): 102-109.
[9]李爽. 低速大轉矩繞線轉子自起動永磁同步電動機的設計與起動性能分析 [D]. 沈陽:沈陽工業大學, 2011.
[10]FENG Gui-hong, LI Chao, ZHANG Bing-yi. Analysis on starting performance of a novel wound rotor Line-start Permanent Magnet Synchronous Motor[C]// 2011 International Conference on Electrical Machines and Systems, 20-23 Aug. 2011,Beijing, China. 2011:1-4.
[11]FENG Gui-hong,LI Qing-xu, ZHANG Bing-yi. Study on starting performance of a novel wound rotor line-start PMSM with WMW[C]//2011 International Conference on Electrical Machines and Systems, 20-23 Aug. 2011, beijing, China. 2011:1-5.
[12]SEN P C. Rotor chopper control for induction motor drive: TRC strategy[J]. IEEE Transactions on Industry Applications, 1975, 11(1): 43-49.
[13]沈天飛,陳伯時,龔幼民. 異步電機轉子IGBT斬波調阻調速的準動態模型[J]. 電機與控制學報. 2001, 5 (1): 20-23.
SHEN Tianfei, CHEN Boshi, GONG Youmin. Quasi-dynamic model of the rotor IGBT chopper controlled induction motor[J]. Electric Machines and Control, 2001, 5(1): 20-23.
[14]祁強,張廣溢. 異步電動機轉子電阻斬波調速系統的特性分析與仿真研究[J]. 電機與控制學報. 2005, 9 (1): 45-47.
QI Qiang, ZHANG Guangyi.Performance analysis and simulation study of the rotor chopper controlled induction motor[J]. Electric Machines and Control, 2005, 977(1): 45-47.
[15]彭清祥. 繞線異步電機轉子電流斬波調速系統設計 [D]. 長沙:中南大學,2008.
(編輯:劉素菊)
Chopper starting control of wound-rotor line-start PMSM
FENG Gui-hong,LI Qing-xu,DAI Si-rui,WANG Shuai,ZHANG Bing-yi
(School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870, China)
PWM chopper resistance regulation starting control method was proposed for the wound rotor line-start PMSM (WRLS-PMSM). In order to improve the starting performance, the average starting torque always was kept in maximum by adjusting the equivalent resistance series connected to rotor winding in the process of starting. The relation between the equivalent series resistance and chopper duty ratio was deduced with PWM chopper adjustable resistance quasi dynamic mathematical model establishment by converting impedance and voltage to the dc chopper link; when the synthetic asynchronous torque is the biggest, the relationship between the equivalent series resistance in the rotor side and speed can be deduced. The chopper rules can be acquired,which sets the starting performance experimental platform of WRLS-PMSM. And the starting performance was tested. The comparison with the rotor winding short-circuit starting and traditional squirrel cage rotor LS-PMSM verified the effectiveness of the proposed approach for increasing greatly the starting torque, limiting the starting current as well as improving the pull-in performance.
WRLS-PMSM; starting control; PWM chopper; regulating resistance; max asynchronous torque
2014-03-25
國家重大科學儀器設備開發專項(2012YQ05024207);國家自然科學基金(51077093)
馮桂宏(1963—),女,碩士,教授,研究方向為電機及其控制;
李慶旭(1985—),男,博士研究生,研究方向為永磁電機及其控制;
李慶旭
10.15938/j.emc.2016.08.009
TM 351
A
1007-449X(2016)08-0064-10
戴思銳(1991—),女,碩士研究生,研究方向為永磁電機及其控制;
王帥(1981—),男,博士研究生,研究方向為永磁電機及其控制;
張炳義(1954—),男,博士,教授,博士生導師,研究方向為特種電機及其控制、電子電氣機械一體化。