基于VANET環境高速公路車輛換道安全車距研究*1
2016-09-02 07:26:13林加華楚雄師范學院云南楚雄675000
楚雄師范學院學報 2016年3期
姜 華,林加華(楚雄師范學院,云南 楚雄 675000)
基于VANET環境高速公路車輛換道安全車距研究*1
姜華,林加華
(楚雄師范學院,云南 楚雄 675000)
高速公路具有車速快、車輛多的特點,由于車輛換道發生追尾的交通事故,造成的經濟損失較為慘重。本文基于VANET環境,在典型的換道場景中,利用V2V通信的技術,根據汽車動力學原理,通過對換道的4個階段的分析研究,提出了車輛從本車道變換到目標車道,與目標車道的前車應保持的換道安全車距模型,最后在NCTUNS網絡仿真軟件下建立了仿真實驗環境。實驗結果表明,換道安全車距模型是正確的,具有較好的實用性,可為汽車自動駕駛、輔助駕駛或預警系統的應用奠定基礎。
VANET;高速公路;車輛換道;換道安全車距
引言
車輛行駛在高速公路上,換道超車是常見的駕駛行為。駕駛人員通過對周圍車輛的距離和車速做預估和判斷,調整和完成駕駛操作,如果預估失誤和判斷錯誤,就會有發生碰撞的危險。據統計,由于換道引起的交通事故約占到總交通事故的4%~10%,比例雖不高,但造成的交通延誤約占總交通事故所引起延誤時間的10%[1],給社會造成了巨大的經濟損失。車載自組網 (Vehicular Ad Hoc Network,VANET)是一種專為解決運動中車輛間進行通信而設計的自組織網絡,VANET主要是通過實現車輛與車輛之間通信 (V2V)、車輛與道路旁基礎設施之間的相互實時通信(V2I)以及V2V與V2I相結合的通信體系,并利用這些通信方式來改善道路交通的安全,構成一種適用于交通通信環境下的無線移動網絡。
本文利用V2V通信的技術,根據汽車動力學原理,研究汽車在換道過程中,與目標車道的前車應保持的最小換道安全車距。
1.換道場景
本文利用王軍雷[2]所提出的典型超車環境模型,如圖1所示。圖中M為本車,F和B為目標車道的前車和后車,L為本車道的前車。M車以某一特定的加速度從當前車道變道至目標車道。場景中的車輛在車頭的正前方安裝有速度、加速度傳感器、GPS和無線信息收發裝置,在一定范圍內的車輛組成自組織的車載網絡 (VANET),網絡中的車輛周期地廣播自車的自身屬性參數(包括車輛尺寸、最大加速度和最大減速度)和實時運動參數 (包括速度、位置、加速度等)的分組消息。車輛在換道過程中,根據收到周圍車的分組判斷是否處于安全車距離之內,通過判斷結果,可為駕駛人員下一步行為提供決策參考。
本文研究在實施換道過程中為避免與目標車道的前車F發生碰撞,M車必須與F車保持的安全距離,為便于開展研究,假設M車與L車、B車有足夠的距離保證換道過程中M車不會與其發生碰撞,除M和F車外,其他車輛縱向和橫向加速度均設為0。
2.換道安全車距模型
2.1換道安全車距的定義
在換道過程中的任意時刻t,設D(t)為M與F車的縱向距離,VM(t)、VF(t)、aM(t)和aF(t)分別為M和F的速度和加速度。為避免前車F在突發情況下緊急制動而發生追尾事故,M車必須與F車保持一定的安全距離,這一距離稱為M車的換道安全車距,記為Ds。
2.2換道安全距離的確定
當M車發現前車F緊急制動時,根據汽車動力學原理,M車的制動包括駕駛人的反應、制動協調、減速度增長和持續制動4個階段[3],記ti和Di分別為各階段所持續的時間和M車行駛的距離,DF為F車從制動開始到停車行駛過的距離。若M與F兩車不發生追尾,M和F車的最小安全距離為Ds=D1+D2+D3+D4-DF+△d。M車的制動4階段速度-時間關系如圖2。
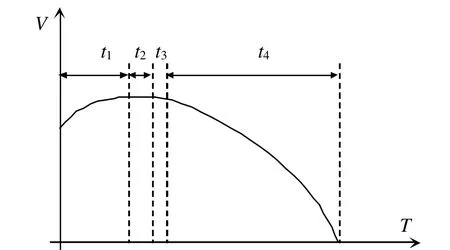
圖2 M車的制動速度-時間關系

在t1時刻,VM(t)=VM(t)+aM(t)t1=VM(t)+1.2aM(t),
在第2階段,汽車各部分處于制動協調狀態,可將M車近似看成勻速狀態,經研究,99%的車的制動協調時間t2=0.2S[5],有
D2=VM(t)t2=0.2VM(t)+0.24aM(t),


其中,aF為F車的最大減速度。
同理,F車從制動到靜止為止,所行駛的距離為

在上式中,將小于等于取為等于,即為換道過程中M車與F車應保持的最小換道安全距離。可見,在換道過程的任意時刻t,兩車間的換道安全距離主要由兩車的速度、加速度和最大減速度決定的。
3.模型仿真
為了驗證本模型的正確性和實用性,在NCTUNS中,建立了3輛配備有車載單元的汽車行駛1000M的高速公路上的VANET模擬環境 (如圖3),其中2號車為準備換道車輛,4號車為目標車道上的前車,4號車前方有障礙物。另外,為CarAgent提供了5種與高速公路行駛相匹配的配置文件,在CarAgent模塊中加入換道安全距離檢測功能。以此來檢驗模型的正確性。
通過對大量、反復的實驗得到的實驗結果分析,只要2號車在指定時間與目標車道的4號車的距離大于或等于最小換道安全距離,2號車即可換道,即使在4號車遇到前方的障礙緊急制動之后,2號車都能在距離4號車大于5m的后方停下來,因此,本文提出的換道安全距離模型是正確的。同時,換道安全距離的判斷是基于車的速度、加速度與最大減速度等參數,而這些參數,本車都可通過VANET廣播的分組中實時獲取,因此本文提出的換道安全距離模型是可行的。
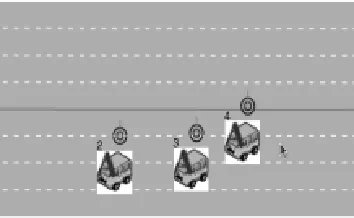
圖3 實驗仿真環境
4.結語
在高速公路,換道引發的交通事故比重雖然不大,但經濟損失比較慘重。本文基于VANET高速公路環境,利用汽車動力學原理和前人研究的成果,提出了換道最小安全距離模型。通過NCTUNS中的仿真實驗分析,表明了該模型的正確性和實用性。該模型可作為汽車自動駕駛、輔助駕駛或預警系統的應用提供理論依據。
[1]Tim van Dijck,Geert A.J.van der Heijden.VisionSense:An Advanced Lateral Collision Warning System[C].IEEE Proceedings.Intelligent Vehicles Symposium,2005:296-301.
[2]王軍雷,李百川,應世杰,鞏航軍;車道變換碰撞預警分析及最小縱向安全距離模型的研究[J].人類工效學,2004,10(4):16—19.
[3]Burgett A,Carter A,Miller R.A collision warning algorithm for rear-end collisions[C].Imtermational Technical conference on the Enhanced Safery of vehicles,1998:566-587.
[4]Seiler P,Song B,Hedrick J.Development of a Collision Avoidance System[J].Neurosurgery 1998,46(2):492—498.
[5]侯德藻.高速公路追尾碰撞預防報警系統·開發研究及其主控程序設計 [D].長安大學;2000.
[6]李百川.道路交通事故預防心理學[M].西安:西安交通大學出版社,1998.
(責任編輯劉洪基)
Research on Safety Distance between Lane-changing Vehicles on Expressways Based on the VANET Environment
JIANG Hua&LIN Jiahua
(School of Information Science and Technology,Chuxiong Normal University,Chuxiong,675000,Yunnan Province)
Fast and crowded,vehicles on expressways easily run into each other when changing lanes,resulting in huge losses.This paper presents a research based on the VANET environmentwhere the V2V communication technology is employed to analyze the four stages of a typical lance changing operation to suggest a safety distancemodel for a vehicle attempting to change from the current lane to the destination one according to theories of vehicle dynamics.Finally,a simulation experimental environment is set up with the help of the network simulation tool-NCTUNS.Results of the experiment show that themodel of safety distance for lane changing vehicles is workable and practical and can thus be applied to automatic drive,assisted drive and the collision warning systems of vehicles.
VANET,expressway,lane change,safety distance for lane change
U412.366
A
1671-7406(2016)03-0045-04
高速公路環境VANET車輛變道碰撞預警消息廣播協議研究,項目編號:11YJRC06。
2015-12-18
姜華 (1978—),男,講師,碩士,主要從事無線網絡研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
建材發展導向(2021年20期)2021-11-20 05:43:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
光學精密工程(2016年6期)2016-11-07 09:07:19
中國交通信息化(2016年9期)2016-06-06 07:42:10
核科學與工程(2015年4期)2015-09-26 11:59:03
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
