三臂式巡檢機(jī)器人重力平衡及其轉(zhuǎn)向越障方法
2016-09-05 05:35:30陶廣宏房立金
中國機(jī)械工程 2016年9期
陶廣宏 房立金
東北大學(xué),沈陽,110819
?
三臂式巡檢機(jī)器人重力平衡及其轉(zhuǎn)向越障方法
陶廣宏房立金
東北大學(xué),沈陽,110819
提出了一種由4組平行四邊形機(jī)構(gòu)串聯(lián)組成的新型三臂式巡檢機(jī)器人機(jī)構(gòu),該機(jī)構(gòu)能夠通過調(diào)節(jié)機(jī)器人的姿態(tài)來滿足越障過程中的重力平衡要求。給出了機(jī)器人越障流程規(guī)劃,并對(duì)轉(zhuǎn)向越障中的關(guān)鍵步驟進(jìn)行了分析,利用二分逼近優(yōu)化算法搜尋滿足重力平衡條件的越障姿態(tài),給出了滿足重力平衡約束條件的運(yùn)動(dòng)學(xué)逆解求取方法,實(shí)現(xiàn)了機(jī)器人重力平衡約束條件下的轉(zhuǎn)向越障運(yùn)動(dòng)。分析結(jié)果表明,該新型三臂式巡檢機(jī)器人具有轉(zhuǎn)向跨越障礙的能力。
重力平衡;轉(zhuǎn)向;越障;巡檢機(jī)器人
0 引言
近年來,國內(nèi)外學(xué)者針對(duì)電力輸電線路巡檢機(jī)器人開展了大量研究,提出了多種形式的機(jī)器人結(jié)構(gòu),部分機(jī)器人已經(jīng)在電力部門得到了實(shí)際應(yīng)用。但由于機(jī)器人的重力平衡問題,現(xiàn)有的機(jī)器人大多是在直線線路上使用,在轉(zhuǎn)角塔處跨越障礙和轉(zhuǎn)向行走方面還存在很多不足。
現(xiàn)有的輸電線巡檢機(jī)器人可分為雙臂結(jié)構(gòu)、多臂結(jié)構(gòu)和三臂結(jié)構(gòu)三大類。雙臂結(jié)構(gòu)是現(xiàn)階段最具代表性的結(jié)構(gòu)形式,由于其越障有單臂掛線行進(jìn)的過程,會(huì)出現(xiàn)側(cè)擺等不穩(wěn)定狀態(tài)[1]。典型的有日本HiBot公司研制的Expliner[2],它具有8輪雙臂的結(jié)構(gòu),通過調(diào)整機(jī)器人下方的桿式機(jī)構(gòu)來保證機(jī)器人的重力平衡。中國科學(xué)院沈陽自動(dòng)化所[1-3]和武漢大學(xué)[4]等研究機(jī)構(gòu)也分別設(shè)計(jì)出雙臂回轉(zhuǎn)式的巡檢機(jī)器人樣機(jī)。加拿大魁北克水電研究院推出了名為L(zhǎng)inescout的巡檢機(jī)器人樣機(jī)[5-6],采用兩對(duì)手臂交互的越障方式,其中每對(duì)手臂為同一構(gòu)件,可視為同一手臂,因此,該結(jié)構(gòu)實(shí)為雙手臂結(jié)構(gòu)形式,始終保持其中一對(duì)手臂掛線,安全系數(shù)高,但該機(jī)構(gòu)沒有水平旋轉(zhuǎn)副,不具備轉(zhuǎn)向越障的能力,因此,不存在側(cè)向重力平衡問題。
多臂結(jié)構(gòu)均具有轉(zhuǎn)向越障能力且工作穩(wěn)定性強(qiáng),不存在單臂掛線過程,因此,縱向?qū)崟r(shí)處于重力平衡狀態(tài)且可通過調(diào)整機(jī)器人姿態(tài)保證其側(cè)向重力平衡,但存在驅(qū)動(dòng)電機(jī)過多、機(jī)構(gòu)總體尺寸大、能耗大、控制困難等缺點(diǎn)。典型的有Aoshima等[7]于1989年提出的六臂結(jié)構(gòu),該機(jī)器人由6個(gè)具有升降臂和行走輪的單元串聯(lián)組成,其兩手臂間距固定,越障能力受限。房立金等[8]也提出了一種五手臂結(jié)構(gòu),該機(jī)構(gòu)由4個(gè)單元機(jī)構(gòu)串聯(lián)組成,能夠?qū)崿F(xiàn)越障過程的側(cè)向重力平衡,具有多種越障模式,但其結(jié)構(gòu)復(fù)雜。
三臂結(jié)構(gòu)工作過程穩(wěn)定,同時(shí)結(jié)構(gòu)和控制方式相對(duì)簡(jiǎn)單。山東科技大學(xué)[9]、西安交通大學(xué)[10]、湖南大學(xué)[11]等分別設(shè)計(jì)出三臂式的巡檢機(jī)器人原型機(jī),都通過3支手臂的交替脫線掛線來適應(yīng)無水平轉(zhuǎn)角的障礙環(huán)境。雖然現(xiàn)有三臂結(jié)構(gòu)在中間手臂掛線時(shí),前側(cè)或后側(cè)手臂可以通過另一手臂的下線來實(shí)現(xiàn)重力縱向及側(cè)向平衡,但轉(zhuǎn)向越障時(shí)中間手臂的脫線掛線過程會(huì)由于前后手臂均處于掛線狀態(tài)、無側(cè)向平衡重力矩而導(dǎo)致機(jī)器人的側(cè)向傾斜,難以準(zhǔn)確定位機(jī)器人姿態(tài)來完成越障任務(wù)。由于在實(shí)際應(yīng)用中轉(zhuǎn)角塔是不可避免的障礙環(huán)境,故具有轉(zhuǎn)向越障能力的三臂式巡檢機(jī)器人機(jī)構(gòu)在技術(shù)上及經(jīng)濟(jì)實(shí)用方面均具有廣闊的發(fā)展前景。
本文通過對(duì)巡檢機(jī)器人在架空地線上跨越轉(zhuǎn)角塔等具有水平轉(zhuǎn)角障礙時(shí)存在重力平衡問題分析,提出了一種由4個(gè)平行四邊形機(jī)構(gòu)串聯(lián)組成的三臂式巡檢機(jī)器人機(jī)構(gòu),并給出轉(zhuǎn)向越障流程及實(shí)現(xiàn)算法。
1 巡檢機(jī)器人轉(zhuǎn)向越障重力平衡問題
輸電線路巡檢機(jī)器人的重力平衡問題可分為縱向重力平衡問題和側(cè)向重力平衡兩大類。
1.1縱向重力平衡問題
縱向重力平衡是在只有單一手臂抓線時(shí)才可能出現(xiàn)的機(jī)器人在行進(jìn)方向的前后傾斜現(xiàn)象。該問題主要存在于雙臂式巡檢機(jī)器人單臂掛線越障過程。現(xiàn)有的三臂式巡檢機(jī)器人在跨越直線障礙時(shí),由于至少有2個(gè)手臂掛線,故不會(huì)出現(xiàn)前后傾斜現(xiàn)象。轉(zhuǎn)向越障或進(jìn)行其他操作時(shí),為保證機(jī)器人的側(cè)向不傾斜,需要其后側(cè)或前側(cè)手臂下線而僅剩中間手臂抓線,此時(shí)也可能會(huì)出現(xiàn)由于縱向重力不平衡而導(dǎo)致的機(jī)器人前后傾斜現(xiàn)象。該問題是由于機(jī)器人質(zhì)心未實(shí)時(shí)處于掛線手臂上,而導(dǎo)致機(jī)器人本體相對(duì)于掛線手臂產(chǎn)生的重力矩前后不相等而造成的。本文所提出的三臂式巡檢機(jī)器人在越障時(shí)至少有2個(gè)手臂抓線,從機(jī)構(gòu)設(shè)計(jì)及越障機(jī)理上解決了巡檢機(jī)器人的縱向重力平衡問題。
1.2側(cè)向重力平衡問題
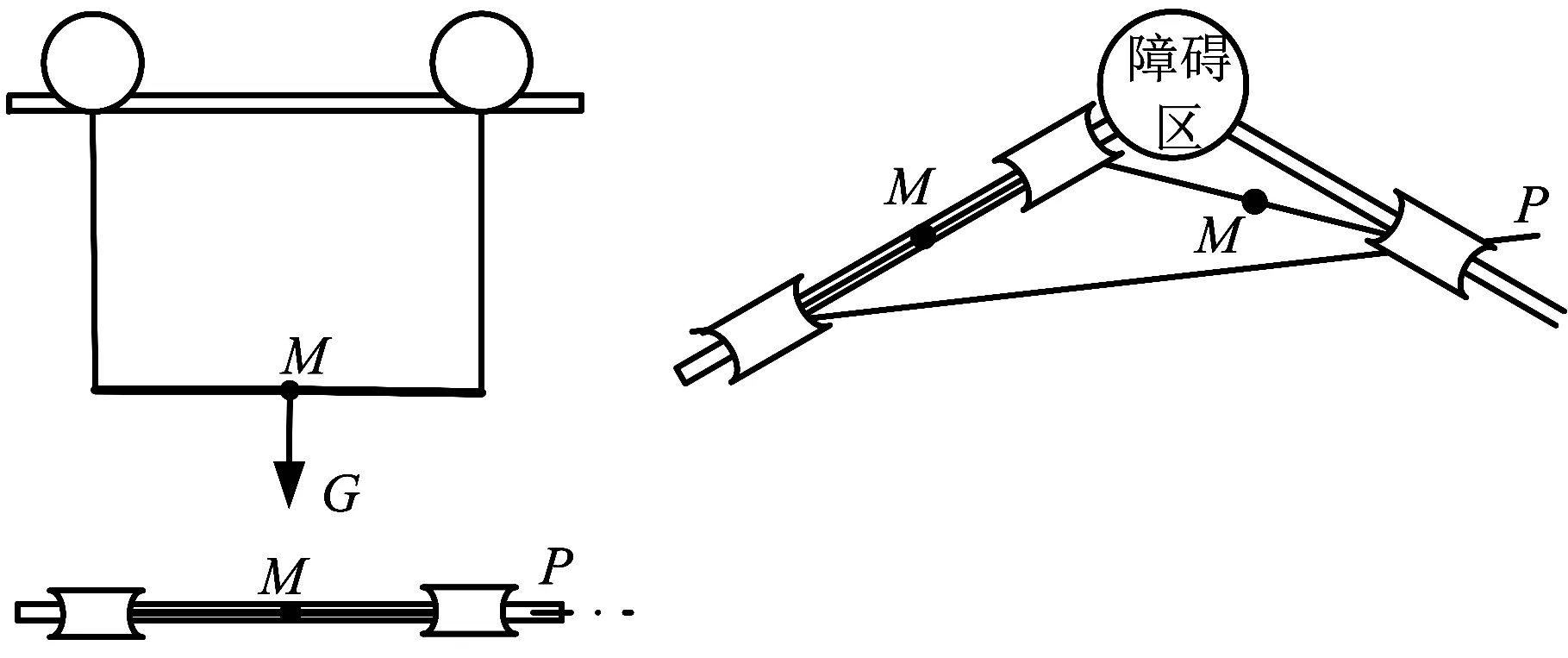
(a)主視及俯視圖(b)轉(zhuǎn)向越障俯視圖圖1 已有三臂機(jī)器人相鄰手臂間機(jī)構(gòu)及其轉(zhuǎn)向示意圖
三臂式巡檢機(jī)器人越障的難點(diǎn)在于轉(zhuǎn)向越障時(shí),如何將機(jī)器人的質(zhì)心調(diào)整到期望的豎直平面上,以保證機(jī)器人的側(cè)向重力平衡,從而精確地定位機(jī)器人手臂進(jìn)行抓線運(yùn)動(dòng)。已有的三臂式巡檢機(jī)器人兩手臂間的結(jié)構(gòu)可歸結(jié)為機(jī)構(gòu)的質(zhì)心位于兩手臂間且無法相對(duì)于兩手臂所在的豎直平面P進(jìn)行側(cè)向相對(duì)運(yùn)動(dòng),因此,機(jī)器人的質(zhì)心調(diào)節(jié)能力受限,只有在單一中間手臂支撐時(shí)才可以滿足側(cè)向重力平衡要求(圖1a)。當(dāng)遇到圖1b所示需要前后兩手臂支撐、中間手臂抬升跨越轉(zhuǎn)角障礙的情況時(shí),機(jī)器人的質(zhì)心M位于圖中豎直平面P的同一側(cè),導(dǎo)致中間手臂行走輪無法抬升以跨越障礙。因此,已有的三臂式巡檢機(jī)器人機(jī)構(gòu)從原理上便不具備跨越轉(zhuǎn)角塔等具有水平轉(zhuǎn)角障礙環(huán)境的能力。
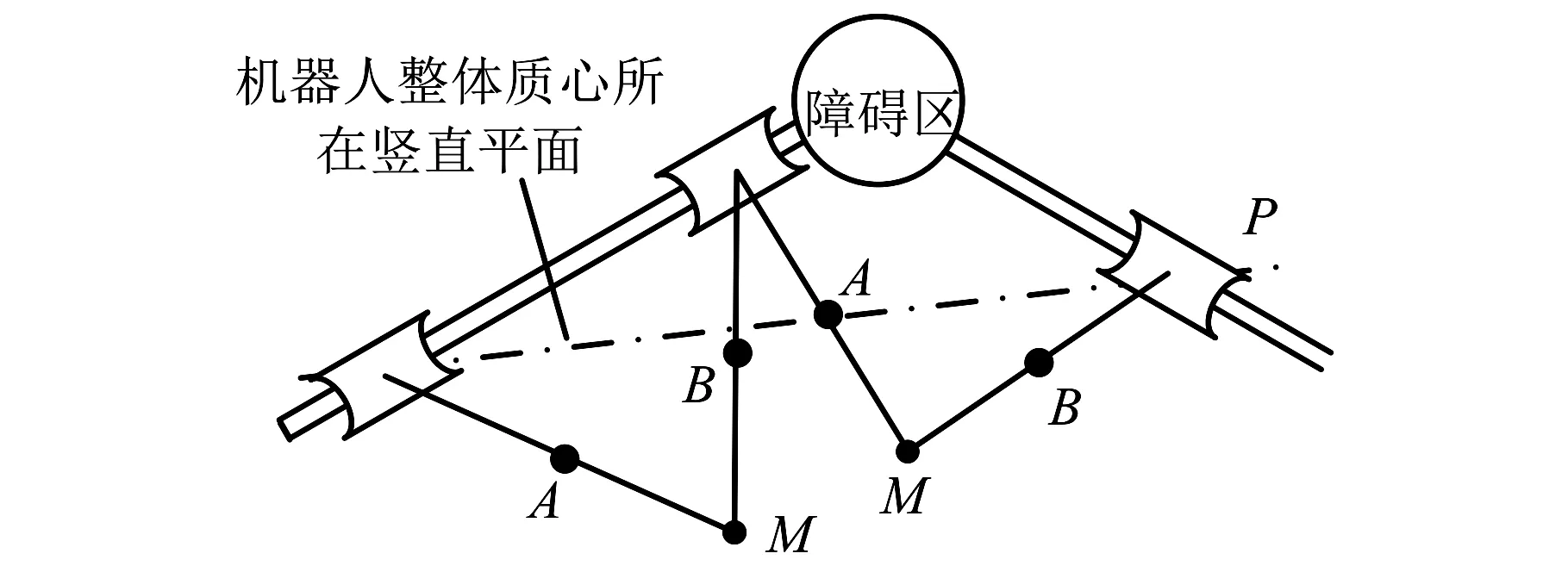
本文提出了一種兩單元串聯(lián)機(jī)器人機(jī)構(gòu)。每個(gè)單元機(jī)構(gòu)包括2個(gè)平行四邊形機(jī)構(gòu),由水平旋轉(zhuǎn)關(guān)節(jié)串聯(lián)組成,如圖2所示。在兩手臂固定且距離小于2個(gè)平行四邊形長(zhǎng)度之和時(shí),中間的兩平行四邊形機(jī)構(gòu)具備側(cè)向偏出并同時(shí)繞O1O2旋轉(zhuǎn)的運(yùn)動(dòng)能力。根據(jù)結(jié)構(gòu)特點(diǎn),若取單元機(jī)構(gòu)的質(zhì)心分別位于兩平行四邊形機(jī)構(gòu)中心及2個(gè)平行四邊形機(jī)構(gòu)間的連接處(圖2a中A、M、B點(diǎn)),則機(jī)器人單元機(jī)構(gòu)的質(zhì)心A、M、B相對(duì)于兩行走輪連線所在豎直平面P所成重力矩力臂,即各質(zhì)心與兩行走輪連線所在豎直平面的水平面投影距離dA、dM、dB取值有如下關(guān)系(當(dāng)2個(gè)單元機(jī)構(gòu)串聯(lián)時(shí),質(zhì)心位于期望機(jī)器人整體質(zhì)心所在豎直平面同一側(cè)的dA、dM、dB同號(hào),異側(cè)則取其相反數(shù)):
(1)
式(1)說明,本機(jī)器人單元機(jī)構(gòu)具有質(zhì)心自我調(diào)節(jié)能力,因此,該形式的2個(gè)單元機(jī)構(gòu)串聯(lián)所組成的三臂式機(jī)構(gòu)可以通過調(diào)整各單元機(jī)構(gòu)中dA、dM、dB的取值來實(shí)時(shí)調(diào)整機(jī)器人整體的質(zhì)心位置,滿足轉(zhuǎn)向越障重力平衡要求,如圖2b所示。

(a)單元機(jī)構(gòu)三視圖
(b)整機(jī)轉(zhuǎn)向越障俯視圖圖2 本文提出的機(jī)器人機(jī)構(gòu)運(yùn)動(dòng)示意圖
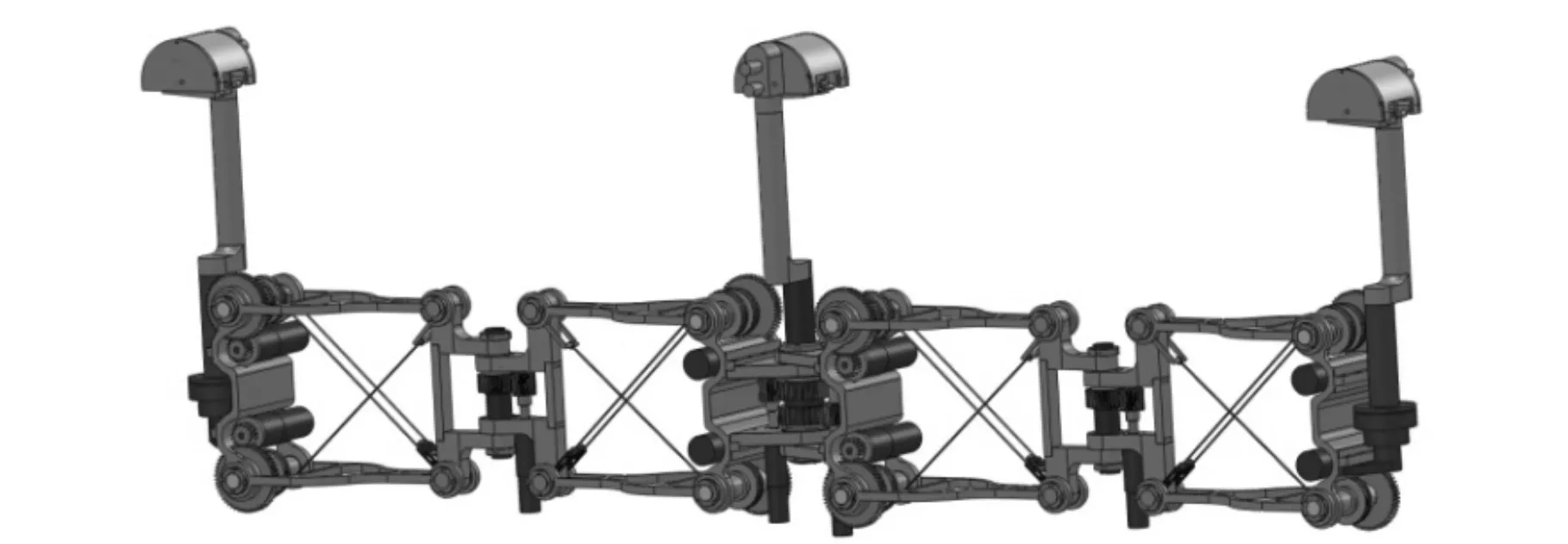
(a)機(jī)器人模型
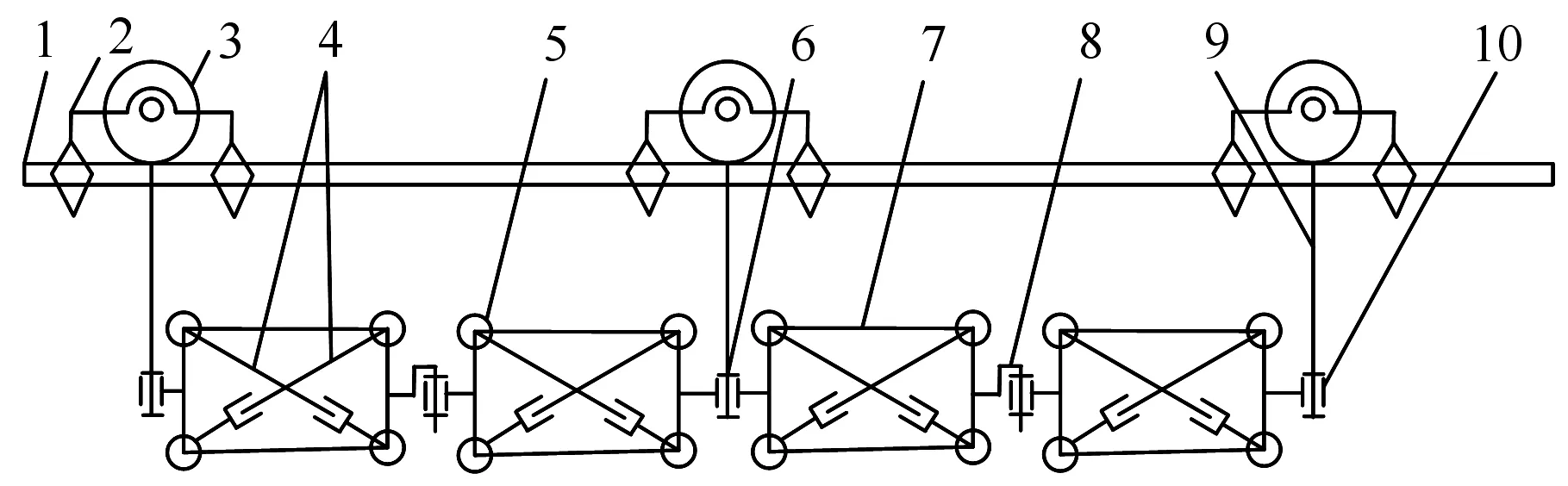
1.輸電線路 2.夾持機(jī)構(gòu) 3.行走輪 4.驅(qū)動(dòng)柔索 5.平行四邊形機(jī)構(gòu)鉸接關(guān)節(jié) 6.復(fù)合旋轉(zhuǎn)副 7.平行四邊形機(jī)構(gòu) 8.單元內(nèi)水平旋轉(zhuǎn)關(guān)節(jié) 9.手臂機(jī)構(gòu) 10.兩側(cè)手臂旋轉(zhuǎn)關(guān)節(jié)(b)機(jī)器人結(jié)構(gòu)簡(jiǎn)圖圖3 機(jī)器人結(jié)構(gòu)簡(jiǎn)圖及實(shí)體模型
2 新型三臂式機(jī)器人結(jié)構(gòu)
如圖3所示,以相鄰兩手臂間的2個(gè)串聯(lián)平行四邊形機(jī)構(gòu)為一個(gè)單元,則該機(jī)構(gòu)由2個(gè)單元機(jī)構(gòu)所組成。單元機(jī)構(gòu)前后有手臂9和安裝在手臂上端、由行走輪3和夾持機(jī)構(gòu)2構(gòu)成的輪爪復(fù)合機(jī)構(gòu),單元機(jī)構(gòu)間用復(fù)合旋轉(zhuǎn)副6連接,復(fù)合旋轉(zhuǎn)副6為行星輪式結(jié)構(gòu),由2個(gè)電機(jī)配合驅(qū)動(dòng),保證前后平行四邊形機(jī)構(gòu)及手臂能夠獨(dú)立自由轉(zhuǎn)動(dòng)。每個(gè)單元機(jī)構(gòu)還包括2個(gè)平行四邊形機(jī)構(gòu)7,單元機(jī)構(gòu)內(nèi)的平行四邊形機(jī)構(gòu)用水平旋轉(zhuǎn)副8連接。位于機(jī)器人最前端和最后側(cè)2個(gè)手臂與相鄰的平行四邊形機(jī)構(gòu)用水平旋轉(zhuǎn)副10連接。平行四邊形機(jī)構(gòu)的桿件采用關(guān)節(jié)5鉸接,采用兩條柔索4分別連接平行四邊形機(jī)構(gòu)的2個(gè)頂點(diǎn),通過電機(jī)驅(qū)動(dòng)安裝在四邊形機(jī)構(gòu)上的滾筒來控制機(jī)構(gòu)對(duì)角線的長(zhǎng)度,從而控制機(jī)構(gòu)的俯仰運(yùn)動(dòng)。
該機(jī)器人手臂結(jié)構(gòu)簡(jiǎn)單,自身無需上下伸縮機(jī)能,通過單元機(jī)構(gòu)中兩串聯(lián)平行四邊形機(jī)構(gòu)的俯仰運(yùn)動(dòng)實(shí)現(xiàn)手臂的上升下降運(yùn)動(dòng),單元機(jī)構(gòu)工作空間能夠滿足輪爪復(fù)合機(jī)構(gòu)的上下線需求[8]。
3 新型三臂式巡檢機(jī)器人轉(zhuǎn)向越障流程及算法
3.1轉(zhuǎn)向越障動(dòng)作規(guī)劃
本機(jī)構(gòu)的直線越障方式與已有的三臂機(jī)器人[9-11]越障方式基本相同。
當(dāng)機(jī)器人遇到轉(zhuǎn)角障礙環(huán)境時(shí),可采用實(shí)時(shí)保證機(jī)器人側(cè)向重力平衡的伸縮越障模式,越障過程如圖4所示。由輸電線路的具體構(gòu)造知轉(zhuǎn)角處的障礙為下側(cè)可通過式障礙,圖中機(jī)器人機(jī)構(gòu)與障礙區(qū)重疊部分表示可能位于輸電線路下側(cè)的部分機(jī)器人機(jī)構(gòu)。點(diǎn)劃線P表示機(jī)器人質(zhì)心所在的豎直平面。不規(guī)則三角形區(qū)域表示機(jī)器人質(zhì)心所在區(qū)域。
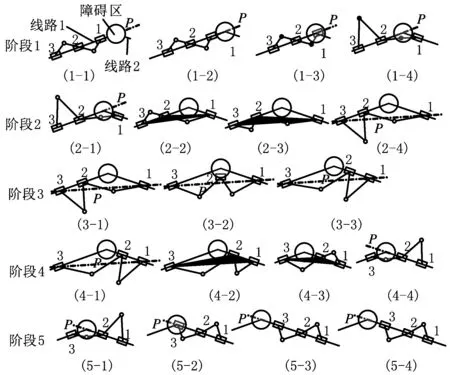
圖4 轉(zhuǎn)向越障流程俯視圖
根據(jù)質(zhì)心的調(diào)整過程,可將該機(jī)器人的轉(zhuǎn)向越障分為五個(gè)階段:
階段1機(jī)器人的質(zhì)心位于輸電線路1所在豎直平面階段。共有以下4步:
(1)當(dāng)檢測(cè)到轉(zhuǎn)角障礙環(huán)境時(shí),機(jī)器人調(diào)整到圖4中(1-1)所示的收縮模式,此時(shí)機(jī)器人的平行四邊形機(jī)構(gòu)側(cè)向偏出較少。
(2)行走輪1下線,該過程與行走輪2配合的夾持機(jī)構(gòu)夾緊輸電線路,與行走輪3配合的夾持機(jī)構(gòu)松開,調(diào)整輪2-輪3運(yùn)動(dòng)鏈的姿態(tài)以保證機(jī)器人側(cè)向重力平衡, 如圖4中(1-2)所示。
(3)輪2夾持機(jī)構(gòu)松開,在線行走輪2、3行進(jìn),使輪2靠近障礙區(qū)域,如圖4中(1-3)所示。
(4)輪2夾持機(jī)構(gòu)夾緊輸電線路,調(diào)整輪1的位置及輪2-輪3運(yùn)動(dòng)鏈的姿態(tài),使輪1落在輸電線路2上,如圖4中(1-4)所示。
階段2機(jī)器人的質(zhì)心由輸電線路1所在豎直平面向行走輪1與行走輪3連線所在豎直平面的過渡階段。共1步:
在3個(gè)行走輪同時(shí)落線時(shí),如圖4中(2-1)所示,輪2夾持機(jī)構(gòu)夾緊輸電線路,分別調(diào)整輪2-輪3運(yùn)動(dòng)鏈及輪2-輪1運(yùn)動(dòng)鏈的姿態(tài)。為增加輪2在輸電線路2上的可夾持區(qū)域,使輪1運(yùn)動(dòng)到距離轉(zhuǎn)角障礙較遠(yuǎn)的位置。該過程中3個(gè)行走輪均位于輸電線路上,因此,只需保證機(jī)器人質(zhì)心位于圖4中(2-2)、(2-3)灰色區(qū)域的豎直空間內(nèi)即可保證機(jī)器人質(zhì)心穩(wěn)定過渡到圖4中(2-4)所示的輪1與輪3連線所在豎直平面P上。
階段3中間手臂越障階段,即行走輪2由輸電線路1運(yùn)動(dòng)到輸電線路2上。共有以下兩步:
(1)在機(jī)器人質(zhì)心過渡到行走輪1與行走輪3連線所在豎直平面后,行走輪1與行走輪3夾持機(jī)構(gòu)分別夾緊輸電線路,如圖4中(3-1)所示。
(2)行走輪2脫線并沿能夠保證機(jī)器人存在平衡位姿運(yùn)動(dòng)學(xué)逆解且與障礙無干涉的預(yù)定軌跡運(yùn)動(dòng)到輸電線路2上并抓線,如圖4中(3-2)、(3-3)所示。該步驟需實(shí)時(shí)調(diào)整機(jī)器人輪3-輪1運(yùn)動(dòng)鏈的姿態(tài),保證機(jī)器人的質(zhì)心始終位于輪1與輪3連線所在的豎直平面內(nèi),使機(jī)器人不發(fā)生影響行走輪抓線定位的側(cè)傾現(xiàn)象。
階段4機(jī)器人質(zhì)心由行走輪1與行走輪3連線所在豎直平面向輸電線路2所在豎直平面的過渡階段。該階段與階段2類似。
階段5機(jī)器人質(zhì)心位于輸電線路2所在豎直平面階段。該階段與階段1類似。
通過以上5個(gè)階段的連續(xù)進(jìn)行即可完成轉(zhuǎn)向越障。由以上流程可知,機(jī)器人在越障過程中不存在單臂掛線運(yùn)動(dòng)情況,通過側(cè)向偏出的2個(gè)平行四邊形機(jī)構(gòu)實(shí)現(xiàn)側(cè)向重力平衡,可以增加機(jī)器人越障過程的穩(wěn)定性。
3.2轉(zhuǎn)向越障算法設(shè)計(jì)
3.2.1側(cè)向重力平衡條件
保證機(jī)器人轉(zhuǎn)向越障側(cè)向平衡的基本要求,即機(jī)器人質(zhì)心位于期望的豎直平面上,條件可以表示為
(2)
其中,Mh為機(jī)器人各質(zhì)點(diǎn)相對(duì)于期望平面的力矩之和;mi為機(jī)構(gòu)第i個(gè)質(zhì)點(diǎn)的質(zhì)量;di為第i個(gè)質(zhì)點(diǎn)到期望平面間的水平投影距離;g為重力加速度;為區(qū)別位于期望豎直平面兩側(cè)的質(zhì)點(diǎn)所形成重力臂的正負(fù)取值,引入ti表示第i個(gè)質(zhì)點(diǎn)所產(chǎn)生重力矩正負(fù)的因子。
在機(jī)器人實(shí)際應(yīng)用時(shí),兩行走輪抓線會(huì)由于摩擦產(chǎn)生微小的對(duì)抗機(jī)器人側(cè)傾的扭矩,因此,當(dāng)機(jī)器人處于滿足下式:
|Mh|≤ε
(3)
的姿態(tài)時(shí),認(rèn)為機(jī)器人質(zhì)心處于期望的豎直平面內(nèi)。本文利用二分逼近原理,當(dāng)算法迭代至式(3)條件時(shí),便認(rèn)為該機(jī)器人姿態(tài)滿足重力平衡要求。其中,ε為對(duì)抗機(jī)器人側(cè)傾的摩擦力矩,同時(shí)可認(rèn)為是二分逼近算法的允許誤差界。
3.2.2機(jī)器人坐標(biāo)系
平行四邊形設(shè)計(jì)使機(jī)器人的3個(gè)手臂處于實(shí)時(shí)平行狀態(tài),在求解逆運(yùn)動(dòng)學(xué)時(shí),保證基坐標(biāo)的手臂處于豎直狀態(tài),機(jī)器人的末端機(jī)械手姿態(tài)便已確定,只求解其位置變量即可,簡(jiǎn)化求解過程,本文中基坐標(biāo)所在手臂均為豎直狀態(tài)。建立以輪3所在手臂為大地坐標(biāo)的機(jī)器人D-H坐標(biāo)系,如圖5所示。
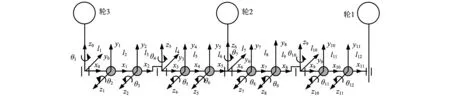
圖5 機(jī)器人D-H坐標(biāo)系
由機(jī)器人機(jī)構(gòu)可知,圖5中l(wèi)2=l5=l8=l11, l1=l3=l4=l6=l7=l9=l10=l12=0,θ3=-θ2, θ6=-θ5, θ9=-θ8, θ12=-θ11。機(jī)器人轉(zhuǎn)向越障問題即滿足重力平衡約束的八自由度機(jī)器人運(yùn)動(dòng)學(xué)逆解問題。機(jī)器人在越障的過程中,機(jī)構(gòu)本身存在運(yùn)動(dòng)學(xué)的多解。將8個(gè)自由變量的運(yùn)動(dòng)學(xué)逆解求解問題轉(zhuǎn)化為分別求解輪2-輪1運(yùn)動(dòng)鏈和輪2-輪3運(yùn)動(dòng)鏈的四自由度機(jī)器人運(yùn)動(dòng)學(xué)逆解問題。通過綜合設(shè)置對(duì)于單一運(yùn)動(dòng)鏈中兩俯仰關(guān)節(jié)角度相等的方法和柱坐標(biāo)變換方法(具體應(yīng)用見3.3節(jié))來簡(jiǎn)化未知變量,進(jìn)行轉(zhuǎn)向越障各階段重力平衡約束下的機(jī)器人運(yùn)動(dòng)學(xué)逆解求解。
3.2.3柱坐標(biāo)變換
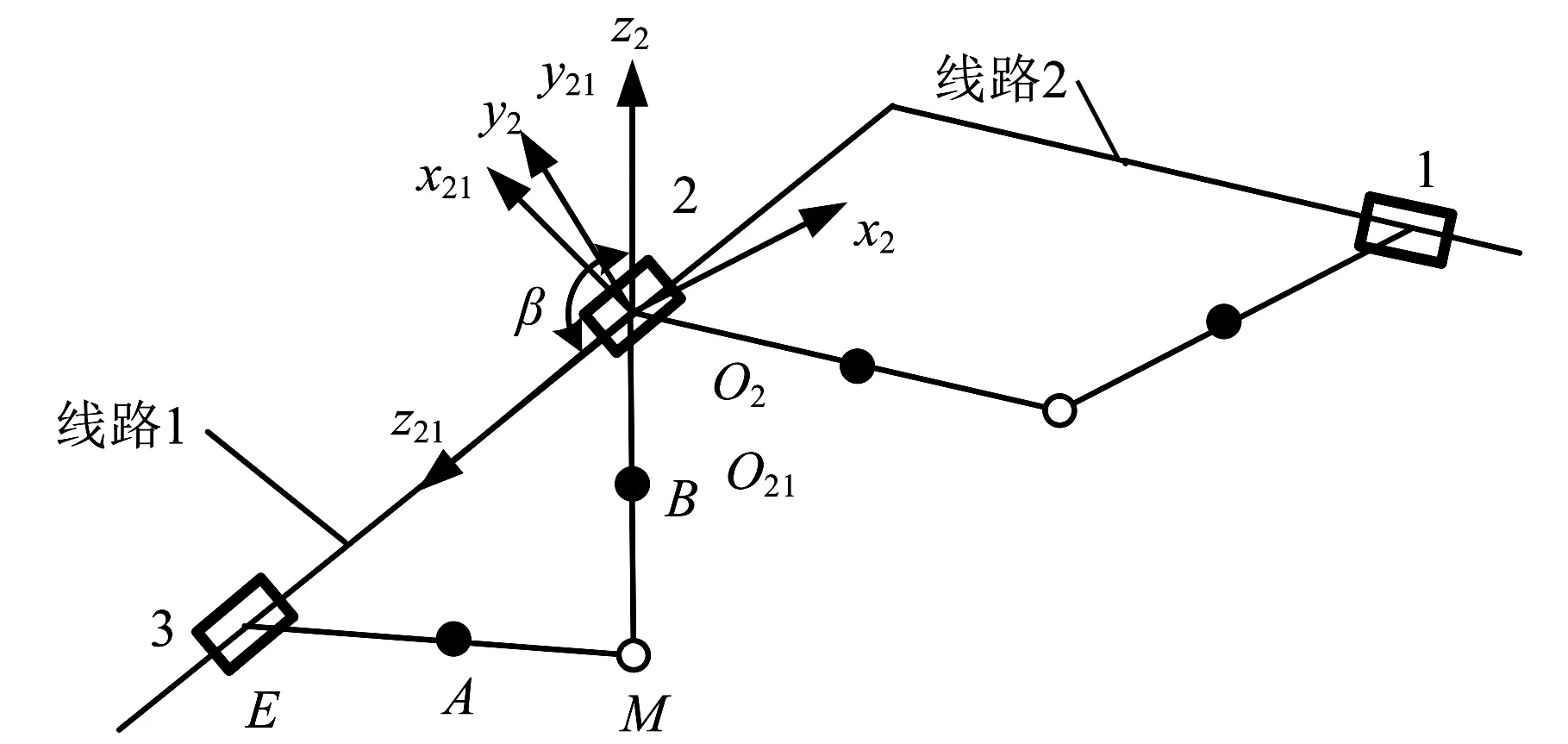
(a)柱坐標(biāo)變換示意圖
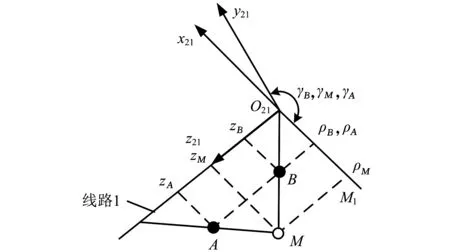
(b)x21y21平面投影示意圖圖6 柱坐標(biāo)變換
以階段3初始姿態(tài)為例來說明柱坐標(biāo)變換方法,如圖6a所示。將原坐標(biāo)系O2x2y2z2繞y2軸逆時(shí)針旋轉(zhuǎn)β角,令變換后的坐標(biāo)系O21x21y21z21的z21軸與輸電線路1重合。
將A、M、B點(diǎn)寫成柱坐標(biāo)形式,分別為(ρA,γA,zA)、 (ρM,γM,zM)、(ρB,γB,zB), 已知圖6a中O2M、EM為平行四邊形機(jī)構(gòu)的長(zhǎng)度l2,A、B兩點(diǎn)分別為O2M、EM中點(diǎn)。圖6b中O21M1為O2M、EM在x21y21平面上的投影,由幾何關(guān)系可知兩桿件投影必在同一直線上。因此,ρA、ρB、ρM、zA、zB、zM可由幾何關(guān)系直接各自求出且γA=γM=γB。令
γA=γM=γB=γ
由以上過程可得出各點(diǎn)在坐標(biāo)系O21x21y21z21中以γ為未知變量的坐標(biāo)表達(dá)式,令各點(diǎn)在坐標(biāo)系O2x2y2z2中的笛卡兒坐標(biāo)向量為r2,在坐標(biāo)系O21x21y21z21中的笛卡兒坐標(biāo)向量為r21,通過下式可將各點(diǎn)坐標(biāo)由坐標(biāo)系O21x21y21z21轉(zhuǎn)化至坐標(biāo)系O2x2y2z2中:
r2=Rβr21
(4)
通過以上變換,可分別求出A、M、B點(diǎn)在坐標(biāo)系O2x2y2z2中的坐標(biāo),各坐標(biāo)僅包含1個(gè)未知變量γ。由于柱坐標(biāo)變換后影響力矩之和Mh的變量?jī)H為γ且繞變換后的z軸旋轉(zhuǎn)360°連續(xù)取值,因此,Mh的取值周期為2π,并在其同一周期內(nèi)最大值與最小值區(qū)間內(nèi)嚴(yán)格單調(diào)。
3.2.4質(zhì)點(diǎn)力矩符號(hào)判斷
假定已知所要確定期望平衡的豎直平面所在直線的兩點(diǎn)為(x1,y1,z1)、(x2,y2,z2),則連接兩點(diǎn)的直線方程可表示為
(5)
該直線在豎直方向平面P的方程為
Ax+By+D=0
(6)
D=-Ax1-By1
由點(diǎn)到平面距離公式可求得各質(zhì)心與所求平面P的距離。根據(jù)本文機(jī)器人工況,令輸電線路1位于大地坐標(biāo)系XZ平面內(nèi),若質(zhì)點(diǎn)位于該點(diǎn)在平面P上的垂足的一側(cè),則該點(diǎn)必然位于過該點(diǎn)平行于y軸方向的直線與該平面交點(diǎn)的同一側(cè)。由該性質(zhì)可推出質(zhì)心位于平面P前側(cè)還是后側(cè)的判定條件。假定機(jī)器人上某質(zhì)點(diǎn)的坐標(biāo)(a,b,c),與y軸平行的向量為(0,1,0),根據(jù)點(diǎn)向式得到過該質(zhì)點(diǎn)且與y軸平行的直線方程為
(7)
代入平面P的方程得到交點(diǎn)的y方向坐標(biāo):
(8)
符號(hào)因子可表示成
3.3典型階段的算法流程設(shè)計(jì)
已知機(jī)器人轉(zhuǎn)向越障運(yùn)動(dòng)過程中行走輪運(yùn)動(dòng)軌跡由若干給定工作空間內(nèi)直線所組成,本算法的任務(wù)為采用將直線定步長(zhǎng)等分的離散方式來確定每一離散點(diǎn)滿足重力平衡條件的機(jī)器人各關(guān)節(jié)角度,以保證機(jī)器人越障過程中處于重力平衡狀態(tài)。
由于越障過程中階段5與階段1類似,階段4與階段2類似,本文僅給出階段1、2、3的轉(zhuǎn)向越障算法流程。階段1與階段2的算法流程分別如圖7、圖8所示。階段3算法流程如圖9所示。圖7~圖9中出現(xiàn)的封裝模塊內(nèi)容如圖10所示。轉(zhuǎn)向越障階段2算法流程中H為

(9)
4 轉(zhuǎn)向越障仿真分析
由轉(zhuǎn)向越障各階段流程算法可知越障階段3算法復(fù)雜,且階段3為機(jī)器人中間手臂越障階段,是三臂式巡檢機(jī)器人跨越轉(zhuǎn)角障礙的關(guān)鍵,選取階段3進(jìn)行數(shù)值仿真分析。

圖9 階段3算法流程
(a)二分求解模塊(b)階段3平衡方程模塊圖10 封裝模塊流程
以行走輪3所在位置為大地坐標(biāo)系,行走輪2起點(diǎn)x方向坐標(biāo)為0.25m,兩輸電線路交點(diǎn)J的x方向坐標(biāo)為0.35m,行走輪2目標(biāo)落線點(diǎn)與J點(diǎn)距離為0.15m, 行走輪1與J點(diǎn)距離為0.3m。兩輸電線路俯角均為15°,在水平投影夾角為120°,機(jī)器人質(zhì)點(diǎn)簡(jiǎn)化為各桿件中點(diǎn),機(jī)器人關(guān)節(jié)點(diǎn),各質(zhì)點(diǎn)質(zhì)量為2kg。機(jī)器人平行四邊形機(jī)構(gòu)長(zhǎng)為0.25m。令機(jī)器人摩擦側(cè)傾對(duì)抗扭矩ε為0.001N·m,輪2的越障路徑為距離最短路徑,即起始點(diǎn)與目標(biāo)點(diǎn)間的線段。在保證實(shí)時(shí)側(cè)向重力平衡的條件下,令機(jī)器人勻速用18s完成越障過程。運(yùn)動(dòng)過程及相應(yīng)參數(shù)取值如圖11所示。
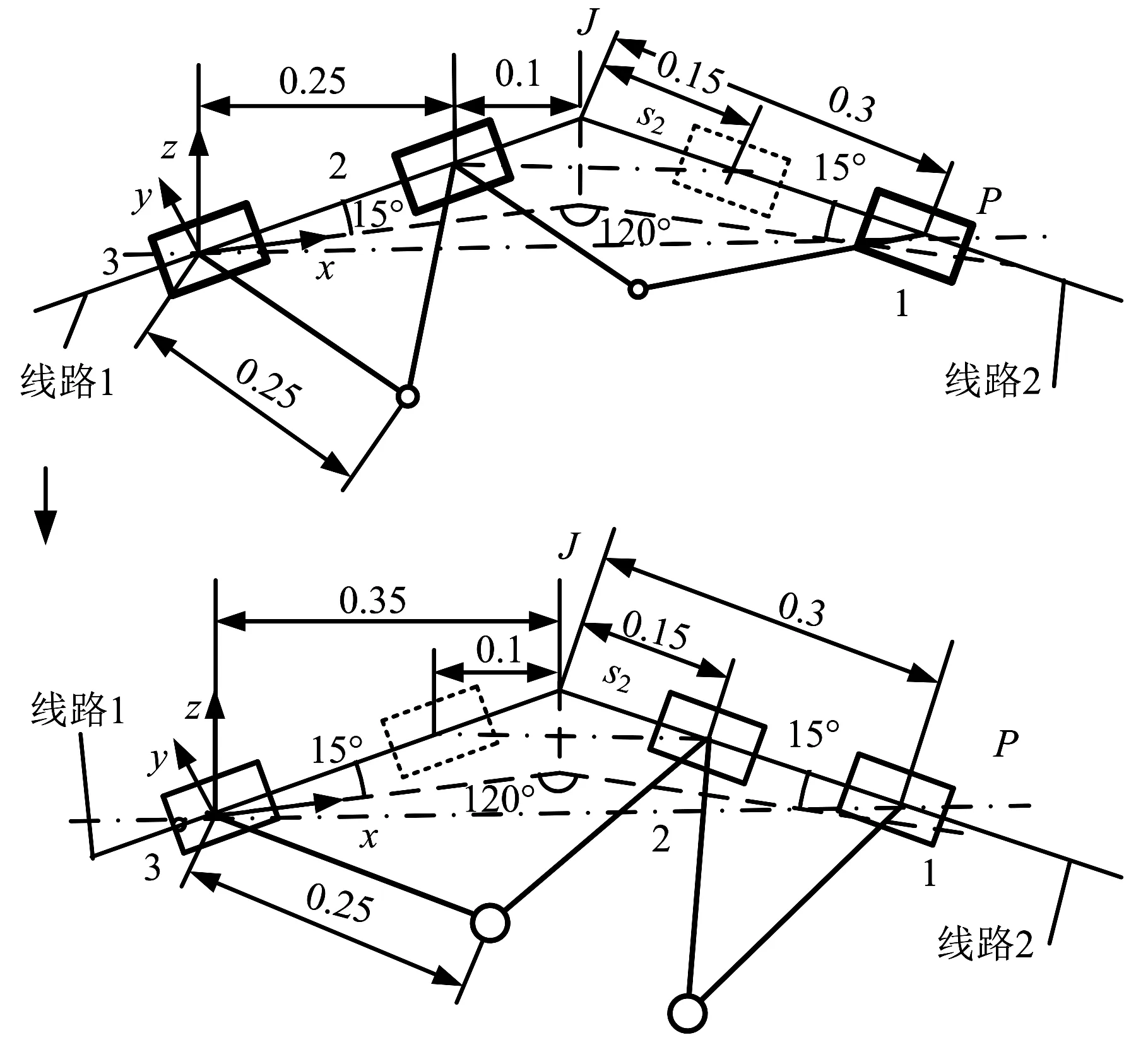
圖11 中間手臂越障過程示意圖
利用圖9所示算法可求得行走輪2在輸電線路2上落線,變量γ23取值區(qū)間為[-π,π],輪2與兩輸電線路交點(diǎn)距離s2取值區(qū)間為[0.1,0.2],輪1與輸電線路交點(diǎn)距離為0.3m,在輪2-輪3運(yùn)動(dòng)鏈采用柱坐標(biāo)變換方法得到的Mh值及等高線圖分別如圖12a、圖12b所示。

(a)力矩

1.Mh=-1 N·m 2.Mh=0 3.Mh=1 N·m(b)等高線圖12 輪2輸電線路2落線Mh值及等高線
由圖12可以看出輪2在輸電線路2上落線,與兩輸電線路交點(diǎn)的距離為0.15m時(shí),采用在輪2-輪3運(yùn)動(dòng)鏈進(jìn)行柱坐標(biāo)變換的方式存在力矩Mh=0的姿態(tài),即滿足階段3算法流程中的初始判別條件。繼續(xù)進(jìn)行階段3算法流程,得到柱坐標(biāo)變量γ23值,如圖13所示。圖14所示為機(jī)器人(θ1,θ2,θ4,θ5,θ7,θ8,θ10,θ11)關(guān)節(jié)角度的實(shí)時(shí)變化值,圖15所示為機(jī)器人轉(zhuǎn)向越障過程中Mh的變化情況。
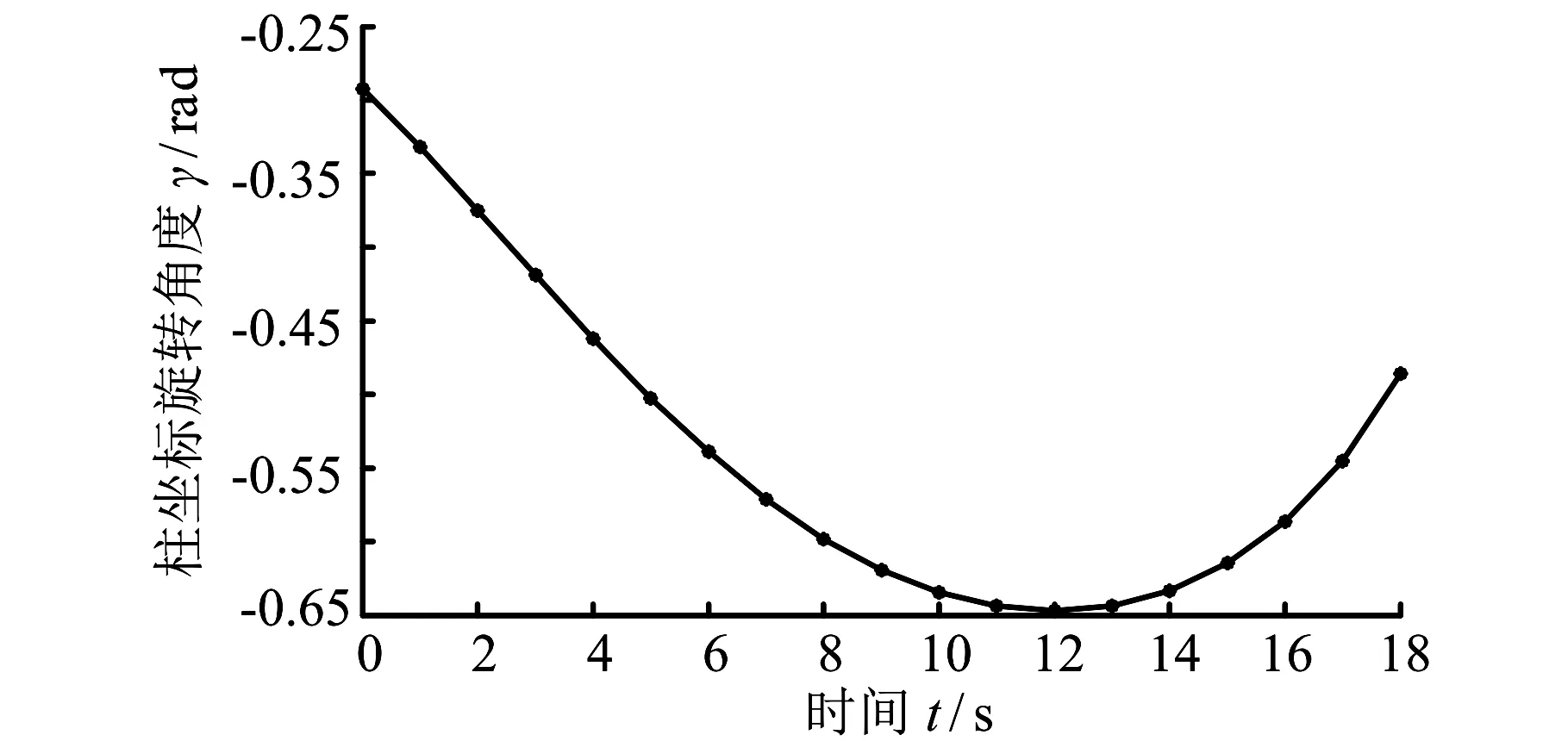
圖13 γ23變化過程

圖14 關(guān)節(jié)角度變化過程

圖15 Mh變化過程
由圖14可以看出機(jī)器人各關(guān)節(jié)角度變化均在-2.5~2.5rad范圍內(nèi),屬于可接受的范圍,且在運(yùn)行階段內(nèi)各關(guān)節(jié)角度無突變。由圖15可以看出機(jī)器人在越障過程中Mh始終位于給定的誤差界內(nèi),機(jī)器人不會(huì)出現(xiàn)側(cè)向傾斜現(xiàn)象,說明本文所提出的機(jī)構(gòu)具備良好的轉(zhuǎn)向越障能力,越障方式及算法可行。
5 結(jié)論
(1)本文提出了一種具有轉(zhuǎn)向越障能力的三臂式巡檢機(jī)器人機(jī)構(gòu),該機(jī)構(gòu)能夠通過調(diào)節(jié)機(jī)器人的姿態(tài)來滿足越障過程中的重力平衡要求。
(2)針對(duì)三臂式巡檢機(jī)器人重力平衡問題,給出了重力平衡約束條件及相應(yīng)的越障算法。
(3)分析及仿真結(jié)果表明,本文所提出的機(jī)器人機(jī)構(gòu)以及轉(zhuǎn)向越障算法可以滿足機(jī)器人轉(zhuǎn)向越障過程中的重力平衡需求,機(jī)器人具有轉(zhuǎn)向越障的能力。
[1]朱興龍,周驥平,王洪光,等. 輸電線巡檢機(jī)器人越障機(jī)理與實(shí)驗(yàn)[J]. 機(jī)械工程學(xué)報(bào),2009, 45(2): 119-125.
ZhuXinlong,ZhouJiping,WangHongguang,etal.ExperimentsandMechanismofObstacleNegotiationofAnInspectionRobotforTransmissionLines[J].JournalofMechanicalEngineering, 2009, 45(2):119-125.
[2]DebenestP,GuarnieriM,TakitaK,etal.Expliner-robotforInspectionofTransmissionLines[C]//IEEEInternationalConferenceonRoboticsandAutomation.Pasadena, 2008:3978-3984.
[3]朱興龍,王洪光,房立金,等.輸電線巡檢機(jī)器人行走動(dòng)力特性與位姿分析[J].機(jī)械工程學(xué)報(bào),2006,42(12): 143-150.
ZhuXinlong,WangHongguang,FangLijin,etal.AnalysisofMovingDynamicPerformanceandPoseofanInspectionRobotforTransmissionLines[J].JournalofMechanicalEngineering, 2006, 42(12):143-150.
[4]WuGP,XiaoH,XiaoXH,etal.TransmissionLineInspectionRobotandDeicingRobot:KeyTechnologies,PrototypesandApplications[C]//1stInternationalConferenceonAppliedRoboticsforthePowerIndustry.Montreal, 2010:1-6.
[5]Pouliot N, Montambault S.Field-oriented Developments for Line Scout Techhnology and Its Deployment on Large Water Crossing Transmission Lines[J].Journal of Field Robotics,2012,29(1):25-46.
[6]Toth J, Pouliot N, Montambault S. Field Experiences Using Line Scout Technology on Large BC Transmission Crossings[C]//1st International Conference on Applied Robotics for the Power Industry.Montreal, 2010:1-6.
[7]Aoshima S, Takeshi T, Tetsure Y. A Wire Mobile Robot Multi-unit Structure[C]//IEEE/RSJ International Workshop on Intelligent Robots and Systems. Tsukuba, 1989:414-421.
[8]房立金,陶廣宏. 新型多單元串聯(lián)巡檢機(jī)器人機(jī)構(gòu)研究與設(shè)計(jì)[J]. 東北大學(xué)學(xué)報(bào)(自然科學(xué)版),2014, 35(8):1173-1178.
Fang Lijin, Tao Guanghong. Research and Design of a Novel Inspection Robot Mechanism with Multi-unit in Series[J]. Journal of Northeastern University(Natural Science), 2014, 35(8):1173-1178.
[9]Wang Jidai, Sun Aiqin, Zheng Candong, et al. Research on a New Crawler Type Inspection Robot for Power Transmission Lines[C]//1st International Conference on Applied Robotics for the Power Industry.Montreal, 2010:1-5.
[10]Yang Dewei, Feng Zuren, Ren Xiaodong, et al. A Novel Power Line Inspection Robot with Dual-parallelogram Architecture and Its Vibration Suppression Control[J].Advanced Robotics, 2014,28(12):807-819.
[11]Liang Qiaokang, Wang Yaonan, Zhang Dan,et al. Multifunctional Robotic System for Live Power Transmission Lines[J]. International Journal of Robot and Automation, 2014,29(2):175-183.
(編輯陳勇)
Gravity Balance and Steering and Obstacle-crossing of Three-arm Inspection Robots
Tao GuanghongFang Lijin
Northeastern University,Shenyang,110819
A novel three-arm inspection robot for power transmission line was proposed, which was composed of four serial parallelogram mechanisms. The robot mechanism possessed the ability to meet the gravity balance requirements when steering and crossing obstacles by adjusting the robot pose. The obstacle-crossing flows were presented, the pivotal step of steering obstacle-crossing was analyzed, the binary approximating principles were applied to search the robot obstacle-crossing pose satisfing the balance constraints.The solution method satisfing the balance constraints of the robot inverse kinematics was proposed,the robot steering and crossing obstacles under gravity balance conditions was realized. The research results show that the novel three-arm inspection robot has steering and obstacle-crossing capacity.
gravity balance; steering; obstacle-crossing; inspection robot
2015-06-12
遼寧省高等學(xué)校創(chuàng)新團(tuán)隊(duì)項(xiàng)目(LT2014006)
TP273
10.3969/j.issn.1004-132X.2016.09.003
陶廣宏,男,1987年生。東北大學(xué)機(jī)械工程與自動(dòng)化學(xué)院博士研究生。主要研究方向?yàn)闄C(jī)器人機(jī)構(gòu)學(xué)。房立金,男,1965年生。東北大學(xué)機(jī)械工程與自動(dòng)化學(xué)院教授、博士研究生導(dǎo)師。