搬運機器人的研究與設計
2016-09-05 00:48:48吳年祥張心全徐傳勝
黑龍江工業學院學報(綜合版) 2016年6期
吳年祥,張心全,徐傳勝
(1.安徽國防科技職業學院 機電工程系,安徽 六安 237001; 2.安徽永成電子機械技術有限公司,安徽 六安 237161)
?
搬運機器人的研究與設計
吳年祥1,張心全2,徐傳勝2
(1.安徽國防科技職業學院 機電工程系,安徽 六安237001;2.安徽永成電子機械技術有限公司,安徽 六安237161)
研究一種在模擬工廠場地上能夠按照規定的白色導引線路徑行駛的移動機器人自動化裝備。具有紅色與藍色工件的顏色識別,工件的抓取、搬運、組裝、尋跡、避障等功能。通過在模擬工廠的場地上調試,機器人能夠完成外徑在240mm,重量在4kg左右圓柱體工件的紅藍顏色識別、工件的抓取、搬運與裝配。
移動機器人;尋跡;脈沖寬度調制
隨著工業技術的迅速發展,新興產業的不斷涌現,機器人技術在機械、機電、汽車等行業發揮著重要作用。機器人的研究和應用已成為衡量一個國家工業水平的一個標志。[1]在柔性自動生產線、自動化立體倉庫與智能工廠中,機器人的行走、抓取、放置、裝配等應用最廣泛。作為機器人的后起之秀搬運機器人,在航天、航空、物流、服務、娛樂等其他領域正以驚人的速度發展,在某種程度上,機器人正在逐步改變著社會生產的勞動結構與生活方式。
1 系統總體設計
本研究的搬運機器人平臺是2011到2013年全國“機器人應用技術”賽項的底盤,通過開發上部結構完成智能工廠里的巡線、定位等功能。也可以根據智能工廠裝配任務與要求,在此底盤上進行尋跡、避障等外圍各種控制電路的設計與制作。利用此機器人平臺設計與制作主控制系統、尋跡處理電路、電機驅動電路以及軟件編程算法實現整體機器人的控制,完成模擬智能工廠工件的組裝與搬運。
智能工廠搬運機器人主要包含主控器系統、二排尋跡傳感器模塊以及信號處理模塊、直流減速電機驅動模塊、三坐標軸模塊以及上部機械手等部件組成,系統結構框圖如圖1所示。
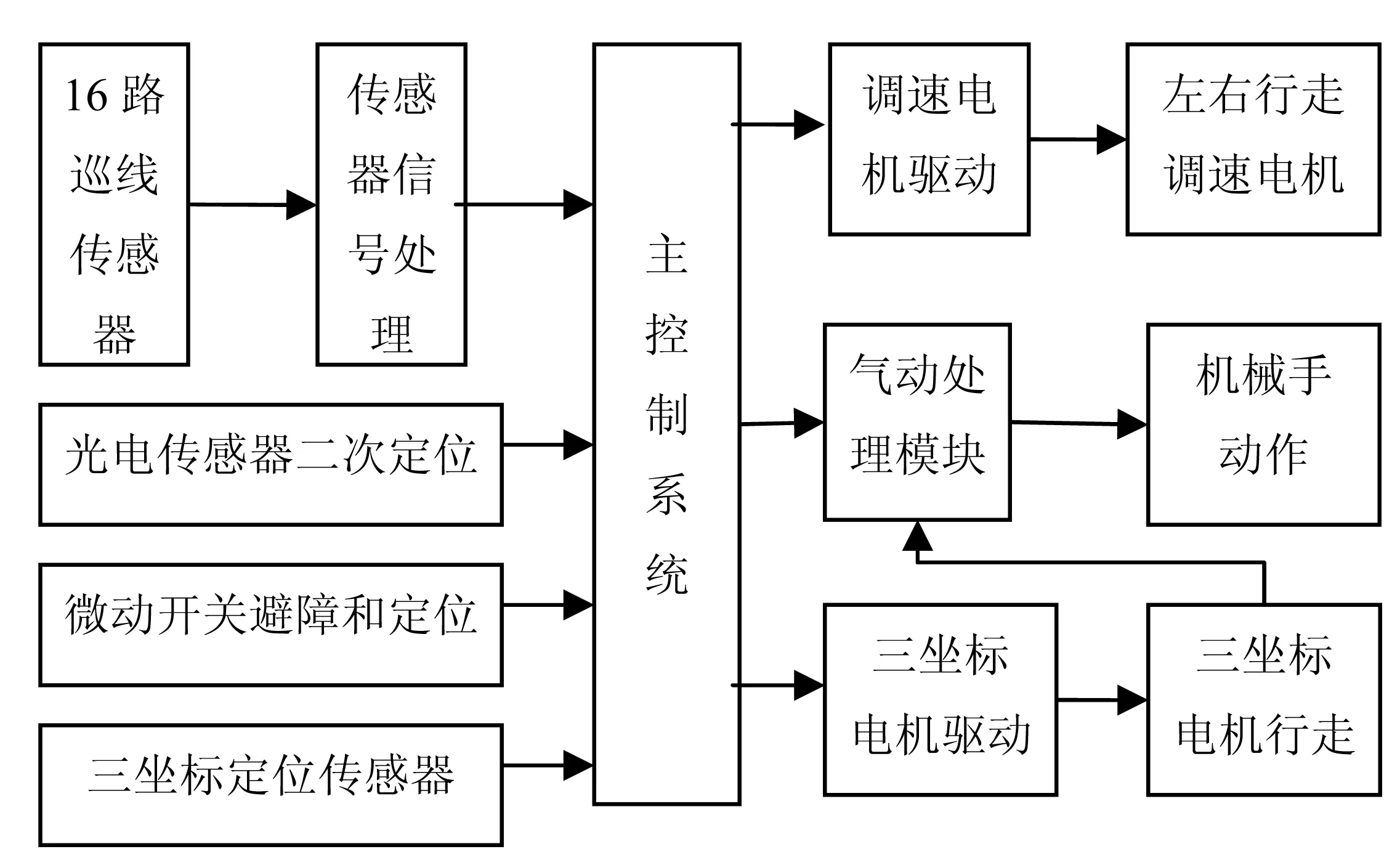
圖1 移動機器人系統構架圖
安裝在搬運機器人底部靠前六分之一位置的光敏電阻和高亮發光二極管組成的16路灰度巡線傳感器精準的探測場地上寬為30mm的白色引導線。[2]而安裝在機器人底部正中間二分之一的位置16路灰度傳感器進行二次定位和交叉線的方格數記錄。通過模糊PID尋跡算法使機器人自適應調整預設位置、路徑或十字路口轉彎位置,然后將前后兩排16路模擬信號分別傳送至各自的信號運算電路。信號處理板對采集來的雙16路信號進行同相比例電壓放大,將其信號與標準電壓進行信號進行比較,再通過穩壓、反相輸出到給單片機進行處理,同時16路發光二極管指示哪一路傳感器在白色引導線上。
主控制接收傳感器處理電路的高電平、低電平信號時,向主電機驅動模塊傳送左電機、右電機脈沖寬度調制控制信號與方向信號。改變兩個脈沖寬度調制信號的占空比來控制左右電機的不同轉速,方向信號來控制兩個主電機的順時針和逆時針,實現機器人的直行、左、右900和1800拐彎。[3]
當移動機器人到達目標裝配臺后碰撞微動開關觸碰,機器人停止前進,通過主控制系統控制三坐標軸的電機帶動滑塊導軌左右、上下、前后行走。當安裝在滑塊導軌上的紅外對射傳感器垂直探頭尋跡到調整后規定數量的黑線時,微控制系統控制電磁閥的通斷,使SMC氣缸與機械手動作完成車輪外圈、內圈與車輪軸等的夾取與放置。
2 系統硬件電路與機械設計
2.1主控制系統設計。
微控制系統是移動機器人控制的核心電路板,考慮機器人三坐標軸傳感和機械手設計等所需要的擴展接口以及庫房現有器件,選用常用的51系列單片機STC12C5A60S2作為搬運機器人的微處理器,負責搬運機器人各類信息采集、接收、信號處理、電磁閥通斷、機械手動作等外部設備控制的重要任務。主控制系統模塊框圖如圖2所示。
主控制模塊含有十六路尋線傳感器接口、8路擴展碰撞傳感器輸入接口,調速電機控制和不可調電機控制輸出接口,一個外圍擴展電路的擴展控制口。電路板內部電路有總線復用電路、8路擴展電路、程序下載模塊電路、通信模塊、主動輪左右電機輸出模塊、三坐標軸非調速電機模塊等。
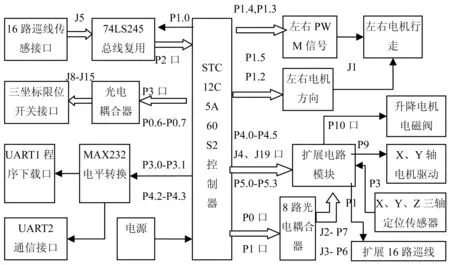
圖2 主控制系統模塊框圖
8路擴展碰撞傳感器輸入端口可以用于機器人三坐標軸限位開關、碰撞限位開關、二次定位光電傳感器、防止干擾避障傳感器等。非調速電機輸出端口接X、Y、Z三坐標軸電機、電磁閥控制。采集巡線信號的同時通過單片機向電機驅動模塊發送電機脈沖寬度調制信號和方向信號控制主動輪行走速度和方向。[4]
2.2 16路傳感器處理電路的設計。
考慮成本、基礎性與通用性,機器人尋跡方面采用以光敏電阻和高亮發光二極管組成的16路尋線傳感器。為了使搬運機器人在尋跡過程中更加穩定、迅速,增強移動機器人的巡線能力,提高其行走速度和準確性,采用主尋線傳感器與輔助傳感器配合的方式,一路負責尋跡引導線的高速行走的信號處理,另外一路負責定位與記錄格數信號處理。
16通道傳感器信號處理電路端口將傳感器采集的尋跡模擬電壓信號傳送同相比例電壓放大電路進行電壓放大,并將其信號與標準電壓進行信號進行比較,再通過穩壓、反相輸出到給單片機進行處理,同時16路發光二極管指示哪一路傳感器在白色引導線上,如圖3所示。但系統發現搬運機器人偏離引導線尋跡,主控制器通過PID算法優化尋跡調整。
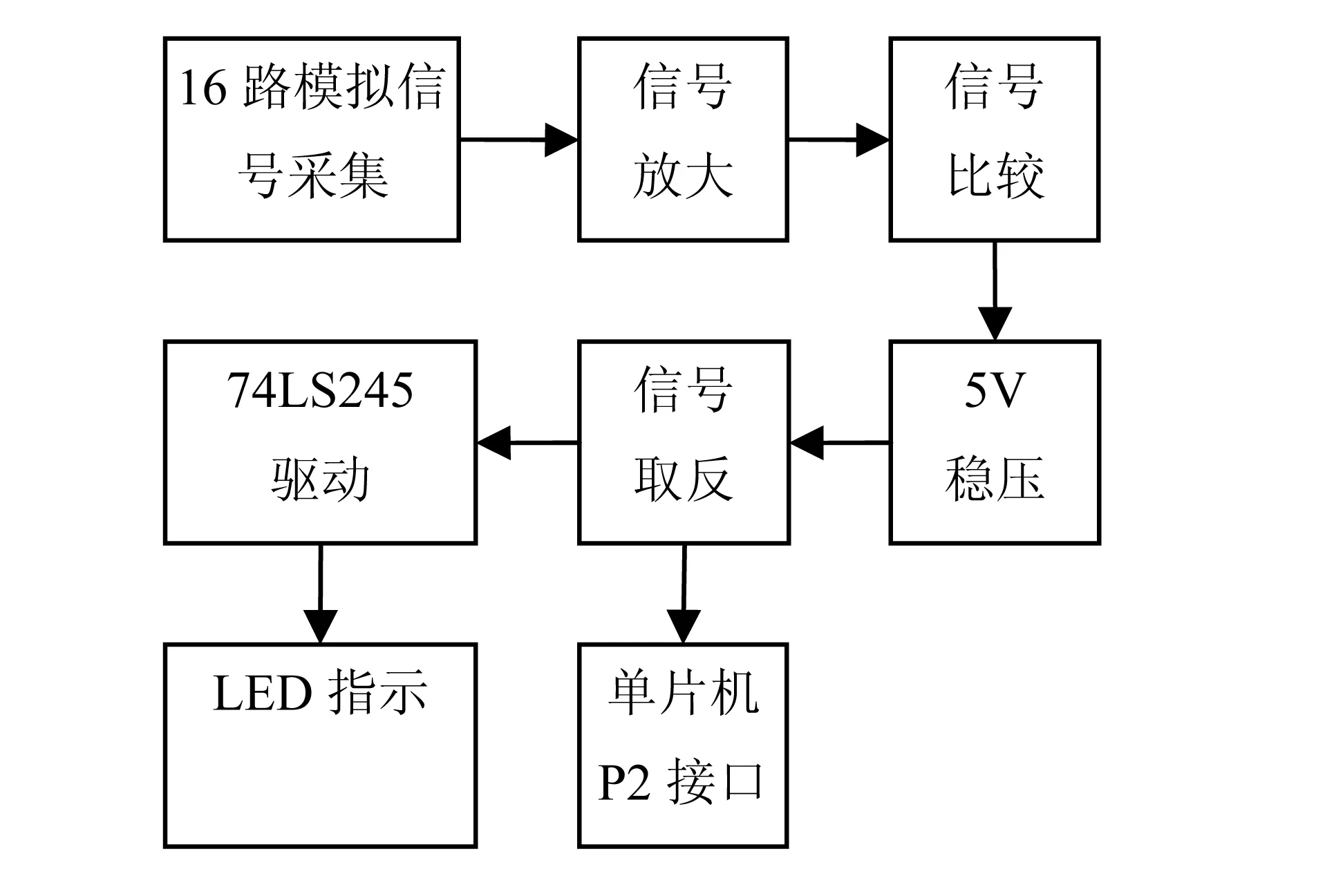
圖3 16路傳感器信號處理框圖
2.3主電機驅動電路設計。
主控制系統讀取傳感器處理電路高、低電平信號,分別向主電機驅動電路發送左、右電機脈沖寬度調制控制信號與方向信號。通過改變兩個脈沖寬度調制信號的占空比來控制左右電機的不同轉速,方向信號來控制兩個主電機的順時針和逆時針,實現機器人前進、拐彎,倒退等相關動作。電路框圖如圖4所示。
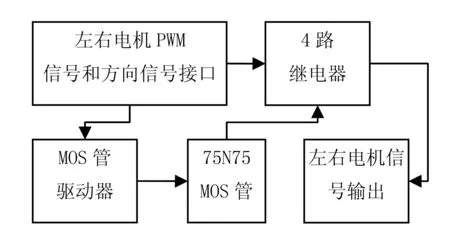
圖4 主動輪電機驅動電路框圖
當主控制器接收傳感器電路處理的高低電平信號時,通過P14、P13分別向主電機驅動模塊發送左電機、右電機的脈沖寬度調制控制信號LPWM,RPWM。左右兩路PWM信號分別通過2路可靠性很高的雙通道柵極驅動的MOS管高速功率器IR2110的單片式集成驅動模塊輸出到MOS管,MOS管的通斷直接控制左、右電機[5]
由于搬運機器人在實際工作時存在反復正反轉和啟停,考慮機器人穩定和可靠性,電路當中使用繼電器控制電機轉向。主控制系統通過單片機P15、P12口分別向主電機驅動模塊發送左電機、右電機的方向控制信號LDIR,RDIR。當左電機方向信號LDIR通過三極管Q1構成的大功率達林管推動繼電器線圈是否通電,當LDIR為“L”時,Q1、Q3組成的復合管處在截止狀態SDR12DC固態繼電器常開觸點狀態不變,LO1與LO2形成正向電流使左邊電機處于正轉。當LDIR為“H”時,Q1、Q3組成的復合管處在飽和導通狀態固態繼電器常開觸點動作,LO1與LO2形成反向電流,使電機反轉。
2.4上部機構與機械手的設計。
當移動機器人按照規劃的路線尋跡到達目標裝配臺后,主控制系統通過4路繼電器驅動電機控制X、Y、Z三坐標電機帶動滑塊導軌按照左右、上下、前后順序移動。當安裝在滑塊導軌上的紅外對射傳感器垂直探頭尋跡到調試后規定數量的黑線定位標志時,X、Y、Z三軸電機停止。主控制系統通過繼電器控制電磁閥的通斷,使氣缸與機械手共同作用將車輪軸搬運到車輪外圈里面、車輪內圈搬運到車輪軸上,再將整個車輪搬運到成品存貯臺上,依次完成工件抓取、搬運、放置、組裝任務。
裝置中設計的機械手可以抓取圓弧形軸承外圈和內圈以及車輪軸,相比常用的一個機構手只能抓取同一種類的工件,提高了機械手抓取工件的效率,搬運機器人的機械手爪如圖5所示,包括滑道(1)、兩個氣缸(2)兩個滾動鋼輥(2、3)、兩個滾動鋼輥(4)、兩個固定板(5)、各兩個內外夾緊件(6、7)、聯結件(8)、兩個固定連接板(9)、夾緊皮墊(10、12)、4040鋁角件(11)。
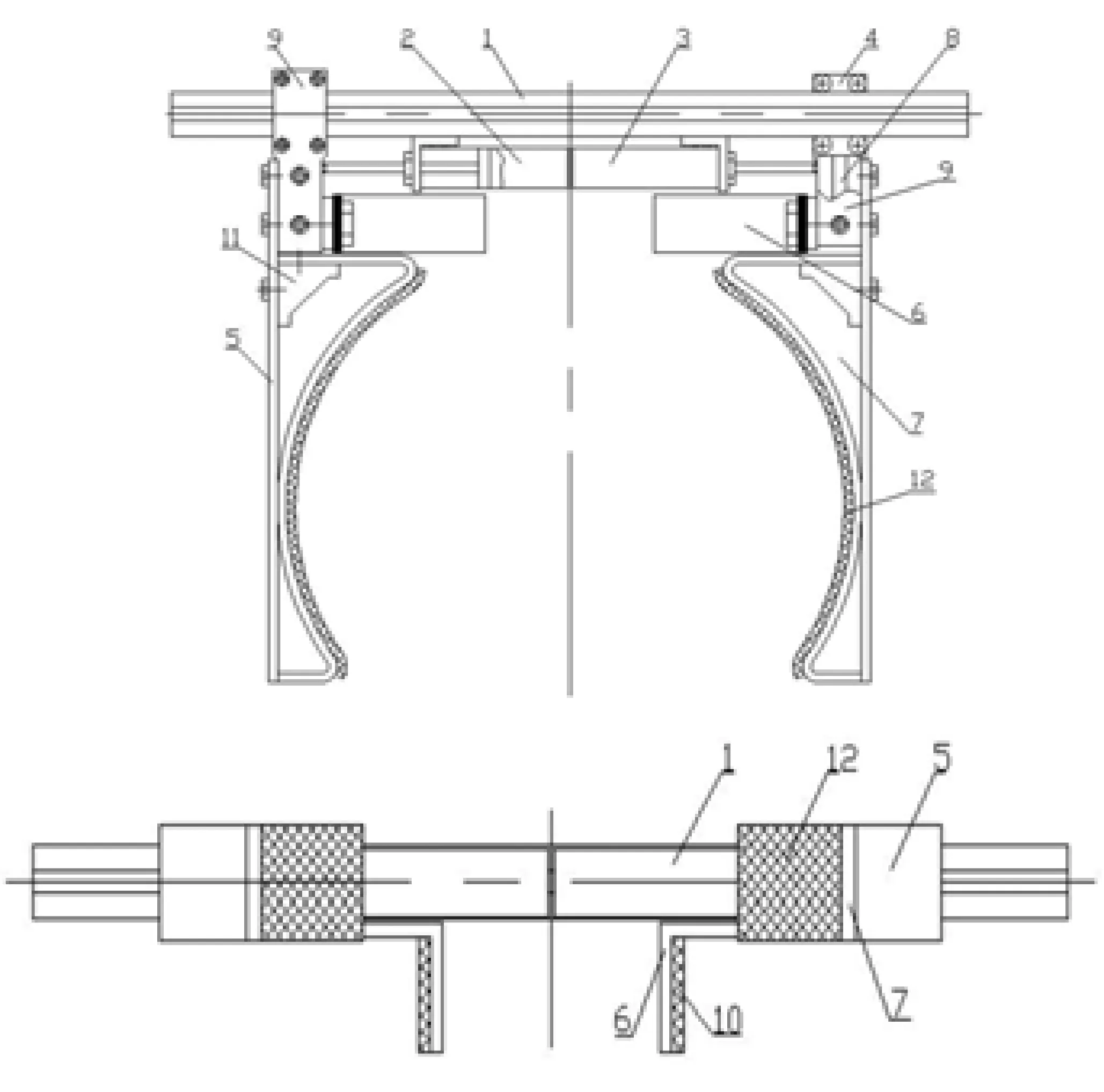
圖5 搬運機器人外部機械手的示意圖
3 系統軟件研究與設計
安裝在搬運機器人底部的前后二排16路巡線傳感器采集尋跡信號,單片機的PWM信號控制左右輪調速電機運行,使機器人沿著規劃的引導線巡線運行,到達設定數量的白色引導線交叉點后進行轉彎、停止、倒退等動作。主控制器查詢機器人前端2個碰撞限位傳感器信號來判斷機器人到達工件存貯臺或裝配柱;再通過控制擴展電路板給X、Y、Z軸電機提供三自由度運動信號(垂直方向升降運動,水平面內左、右運動,水平面內前后伸縮運動)來實現二次定位。當每個運動方向的絕對位置信息確定后,系統三坐標軸的位移使用紅外對射傳感器進行定位。定位時按照先X軸左右平移方向位移再Z軸升降高度,最后確定Y軸前后伸縮量。
當機械手到達可以抓取工件的預設位置,對車輪等工件進行藍色和紅色的顏色識別,最后單片機給電磁閥通電信號,讓氣缸帶動相關機構進行工件的抓取、搬運與裝配,若沒有完成任務繼續巡跡,直到裝配完畢。搬運機器人程序流程圖,如圖6所示。
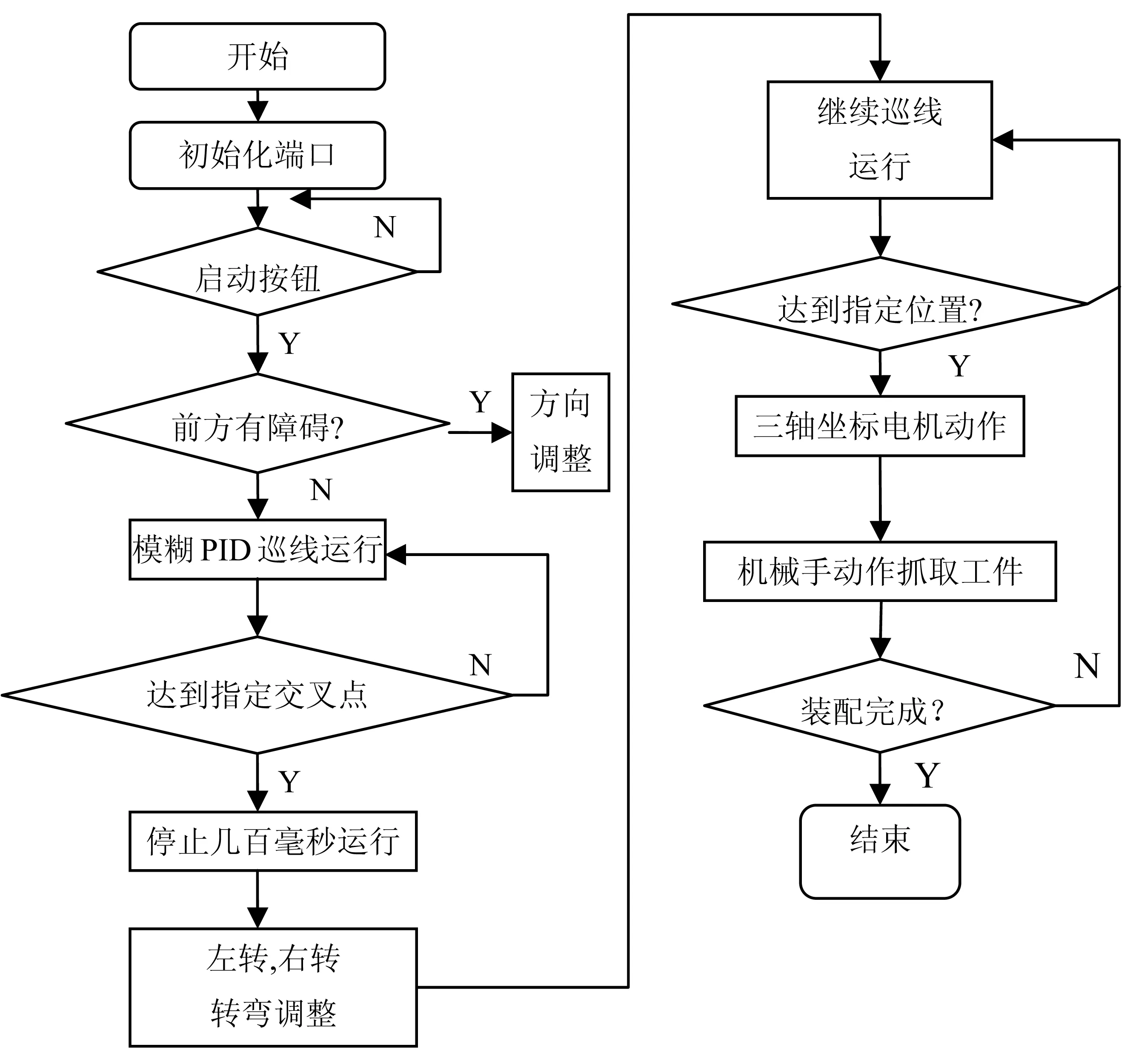
圖6 主程序設計流程圖
4 系統測試與總結
將搬運機器人平臺、三坐標軸、機械手等部件組裝完成,在機器人硬件和軟件調試完畢狀態下,選擇搬運機器人按如圖7所示的一條黃色規劃的路線進行,將1號存貯臺上的紅色車輪軸搬運到3號存貯臺上的紅色車輪外圈內,再通過前進,后退,轉彎,校正等措施準確尋線,將2號存貯臺上的紅色車輪內圈搬運到放在3號存貯臺上的紅色車輪軸上,最后將組裝完成的車輪外圈,內圈,車輪軸一起搬運到4號紅色成品存貯臺,順序的完成抓取、搬運、放置、組裝任務。
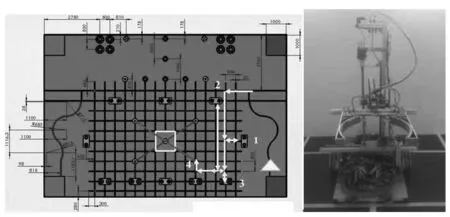
圖7 搬運機器人測試路徑與實物
經過反復的現場調試與程序修正,整機調試結果與問題分析如下。
(1)搬運機器人在多層板組成的模擬場地的引導線上,尋線電路板能指示哪一路尋跡傳感器在白色導引線上。若不能指示,調節16傳感器信號處理電路板上的電位器RW1,直到相關LED能指示哪一路尋跡傳感器在底盤下的白色導引線上。
(2)搬運機器從藍色出發區到2號存貯臺之前,有時候偏離彎曲的白色導引線,原因是由于電機的速度設置過快造成的。通過軟件當中PWM調整函數參數以及PID控制參數,即前排巡線輸入函數和后排輔助巡線傳感器輸入函數內的中線偏差數據,使機器人在彎曲更穩定。
(3)當搬運機器人到達1號,2號,3號等存貯臺后,有時存在定位不準確導致三坐標軸機械手不能準確抓取車輪軸,將車輪軸放到車輪外圈上等問題。原因是機器人底盤前端抱閘限位開關出現松動或三坐標軸直線導軌側面黑色定位標志出現脫落,解決問題后,定位精確,成功率高。
經過以上實驗結果與分析,最終搬運機器人能夠按照預先設置好的路徑巡線,完成工件紅色和藍色的識別,實現工件的抓取與搬運、并將工件成功分類裝配完成,最終搬運到4號目標存貯臺。由于該搬運機器人還處于研究當中,其穩定性有待進一步提高,尤其在尋跡程序方面和硬件定位方面要進一步研究與實踐。
[1]吳晨晨.一種智能移動機器人通用控制系統研究與實現[D].南京:南京航空航天大學,2012.
[2]梁明亮,孫逸潔.競賽機器人的設計與制作[J].電子制作,2011,210(9):62-67.
[3]邊述華,吳年祥.基于智能機器人的運動軌跡實驗綜述[J].安慶師范學院,2013,19(2):57-60.
[4]何峰.六輪腿移動機器人運動分析及控制系統的研究[D].南京:南京理工大學,2005.
[5]顏增顯.基于單片機STC89C52智能小車設計[J].火力與指揮控制,2011,36(12):198-201.
Class No.:TP24Document Mark:A
(責任編輯:蔡雪嵐)
On Design of Transfer Robot
Wu Nianxiang1, Zhang Xinquan2,Xu Chuansheng2
(1.Department of Mechanical and Electrical Engineering,Anhui National Defense Vocational College,Lu’an,Anhui 237001,China;2.Anhui Yongcheng Electronic and Mechanical Technology Co.,Ltd,Lu’an,Anhui 237161,China)
This paper discussed a kind of mobile robot automation equipment which can be driven on the simulation plant site in accordance with the provisions of the white guide wire.The robot has the function of red and blue color recognition, the work of the grab, handling, assembly, search, avoid obstacles and other. By testing the site in the simulation factory, the robot can finish the outer diameter of the 240mm, the weight of the red and blue color recognition, the work piece of the grab, handling and assembly of the 4kg left and right cylinders.
mobile robot; tracing; PWM
吳年祥,碩士,實驗師,安徽國防科技職業學院。研究方向:機器人智能檢測與控制技術。
安徽省教育廳自然科學研究重點項目“基于雙目視覺的無人引導運輸裝置的研究”(編號:KJ2015A448),“基于嵌入式與zigBee技術的智能家居控制系統設計及實現”(編號:KJ2015A438)。
1672-6758(2016)06-0042-4
TP24
A
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
制造技術與機床(2017年3期)2017-06-23 08:11:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
智能系統學報(2015年4期)2015-12-27 09:38:35
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31