基于偽譜重構的采樣反饋近最優(yōu)制導
2016-09-07 03:16:59閆循良廖守億王仕成
系統(tǒng)工程與電子技術 2016年9期
閆循良, 廖守億, 王仕成
(火箭軍工程大學控制工程系, 陜西 西安 710025)
?
基于偽譜重構的采樣反饋近最優(yōu)制導
閆循良, 廖守億, 王仕成
(火箭軍工程大學控制工程系, 陜西 西安 710025)
利用采樣反饋控制和軌跡快速重構技術,設計了固定采樣反饋和自適應采樣反饋兩種有限推力遠程變軌近最優(yōu)閉環(huán)制導策略。建立了空間變軌和交會最優(yōu)制導數學模型。結合變軌運動方程特征,給出了偽譜優(yōu)化參數縮減方法和實時性提升策略;基于采樣反饋和最優(yōu)控制理論,利用采樣數據進行連續(xù)軌跡重構,并將開環(huán)最優(yōu)解進行閉環(huán)反饋以更新制導指令。仿真結果表明,兩種策略在保證任務指標近最優(yōu)性的同時,可以有效抑制地球扁率J2攝動和計算誤差的影響;自適應采樣策略自主性好、制導精度誤差收斂快,但計算量和燃耗偏大,二者使用時需要根據具體任務要求合理選擇。
遠程交會; 閉環(huán)制導; 近最優(yōu)制導; 采樣反饋; 偽譜軌跡重構
0 引 言
隨著空間任務復雜性和多樣性的進一步提高,航天器要求其變軌制導系統(tǒng)和制導律具備良好的自主性、自適應性、魯棒性和安全性等特點。而經典的沖量變軌制導律以及有限推力非最優(yōu)制導律[1-5]很難滿足以上要求。
目前,為了提高航天飛行任務的可行、可靠和最佳性能,遠程變軌軌道設計往往引入最優(yōu)控制理論,將機動軌道和制導律設計轉化為最優(yōu)控制問題,并采用數值方法進行求解[6-7]。然而,此類制導律多為非閉環(huán)形式,制導精度和魯棒性受實際飛行環(huán)境影響較大。隨著控制理論和計算軟硬件技術的發(fā)展,尤其是高性能計算設備的出現(xiàn),非線性反饋控制理論被引入最優(yōu)控制領域,如基于偽譜法的最優(yōu)反饋控制算法[8-9]。該算法利用偽譜法的數值計算優(yōu)勢和采樣反饋控制理論,通過實時反饋低采樣頻率數據實現(xiàn)了高精度的控制,且不需要求解復雜的偏微分方程,因此被廣泛應用于飛行器制導、控制問題[10-13]。
基于文獻[8-9]的實時反饋控制方法和本人前期工作[13],本文將改進的偽譜方法與采樣反饋技術相結合,分別設計了固定采樣和自適應采樣反饋兩種近最優(yōu)制導策略,并通過有限推力燃耗最優(yōu)交會制導仿真驗證了其可行性和有效性。
1 遠程變軌最優(yōu)制導
1.1運動模型描述
由文獻[13]可知,考慮攝動的航天器變軌動力學方程為
(1)
(2)
將式(1)無量綱歸一化,得到
(3)
式中,η=Tref/(mrefg0),mref=m0為量綱質量;Tref=Tmax為量綱力;上標“-”表示無量綱化的參數,簡便起見,后文均將“-”忽略。相關處理過程及參數定義見文獻[13]。
1.2最優(yōu)交會制導規(guī)律設計問題描述
燃料最優(yōu)往往是空間變軌首要考慮的性能指標。考慮燃料最省交會,有
J=m0-mf→min
(4)
且需要滿足運動微分方程約束、端點約束、狀態(tài)及控制約束,以及推力方向矢量內點路徑約束
(5)
最優(yōu)交會制導律設計問題可描述為:對于給定的飛行工況,設計規(guī)劃用于航天器變軌機動的最佳T(t)、u(t)等控制參數,保證其在完成預定交會變軌任務的同時,滿足精度、燃料最省等指標要求。可見,該問題為一考慮干擾和不確定因素的典型多約束、非線性復雜最優(yōu)控制問題,其一般描述形式(典型非線性系統(tǒng))為

(6)
式中,未攝動常量參數p0∈RNp,X(t)?RNx,U(t,x(t))?RNu分別為相應維數的實數空間;且作如下假設,對容許任意控制u(t)而言,微分方程函數矢量f∈RNx均滿足C1-Carathéodory必要條件[8-9]。
將最優(yōu)控制描述為以下典型形式:尋找組合{x(t),u(t)}及系統(tǒng)參數p0,最小化目標函數
(7)
除典型運動微分方程式(6)外,還需滿足式(8)~式(10)所描述的一般形式的非線性復雜代數約束:
(8)
(9)
(10)
由于實際應用中存在參數不確定性因素和外界干擾,對應式(6)的實際非線性系統(tǒng)動力學方程形式為

(11)
式中,ζ(t)為外部干擾;p為實際系統(tǒng)參數常量。
基于文獻[8-9]提出的實時最優(yōu)反饋控制原理,可以對上述問題進行數值求解,在處理不確定性因素和外界干擾影響的同時,實現(xiàn)性能的最優(yōu)化。即利用采樣周期對控制時間區(qū)間[t0,tf]分段,順序解算[ti,ti+1]上的開環(huán)最優(yōu)解u(t)=k(t,x(ti)),依次執(zhí)行上述開環(huán)解,即等價于閉環(huán)反饋控制。解的穩(wěn)定性、連續(xù)性等詳細討論見文獻[8-9,12]。
2 近最優(yōu)制導策略設計
2.1改進的偽譜軌跡快速優(yōu)化設計
由于具備解算實時性高、初值不敏感、解曲線相對光滑等諸多數值解算性能優(yōu)勢[7-8,13-14],偽譜方法(pseudospectral method,PSM),尤其是Legendre-Gauss-Lobatto (LGL) PSM,在最優(yōu)控制及軌跡優(yōu)化領域得到了較為廣泛的應用[14-15]。本節(jié)結合遠程機動變軌數學模型特征,根據位置矢量和速度矢量的物理意義和微分關系,通過變量代換等簡單代數運算消去LGL PSM中的速度優(yōu)化參量,并對約束條件進行轉換處理,從而達到降低優(yōu)化變量和約束方程數目,最終提高LGL PSM數值解算效率的目的。
考慮到LGL PSM在τ∈[-1,1]上用Lagrange多項式對狀態(tài)量和控制量進行擬合,故將時間變量t進行變換:
(12)

將式(3)改寫為微分方程組的形式:
(13)
基于LGL PSM將式(13)離散化,得到代數方程組:
(14)
式中,D=[Dki]為(N+1)×(N+1)維微分矩陣。R、V、A、M、T分別為相應變量在LGL點的離散值。故優(yōu)化變量為X=[RTVTMT]T。
將式(14)的前兩式重新改寫,有
D1R=V,D1V=A
(15)
得到新的離散化方程為
(16)
其中
(17)
考慮質量離散化方程,得到縮減的待優(yōu)化變量為X′=[RTMT]T,微分方程約束的離散化形式為
(18)
并有
V=D1R
(19)
經過上述變換,待優(yōu)化變量消去了狀態(tài)分量V,由X縮減為X′;與此相對應,離散化的微分方程約束則消去了與V有關的矢量方程,由式(14)變?yōu)槭?18)。結合V的物理意義知其維數為3(N+1),因此,待優(yōu)化變量和總約束均縮減了3(N+1)。可見,變換處理后,偽譜解算效率和算法的實時性均將會顯著提高。
2.2近最優(yōu)閉環(huán)制導策略
如圖1所示,本節(jié)設計了固定采樣和自適應采樣反饋兩種閉環(huán)近最優(yōu)制導策略。
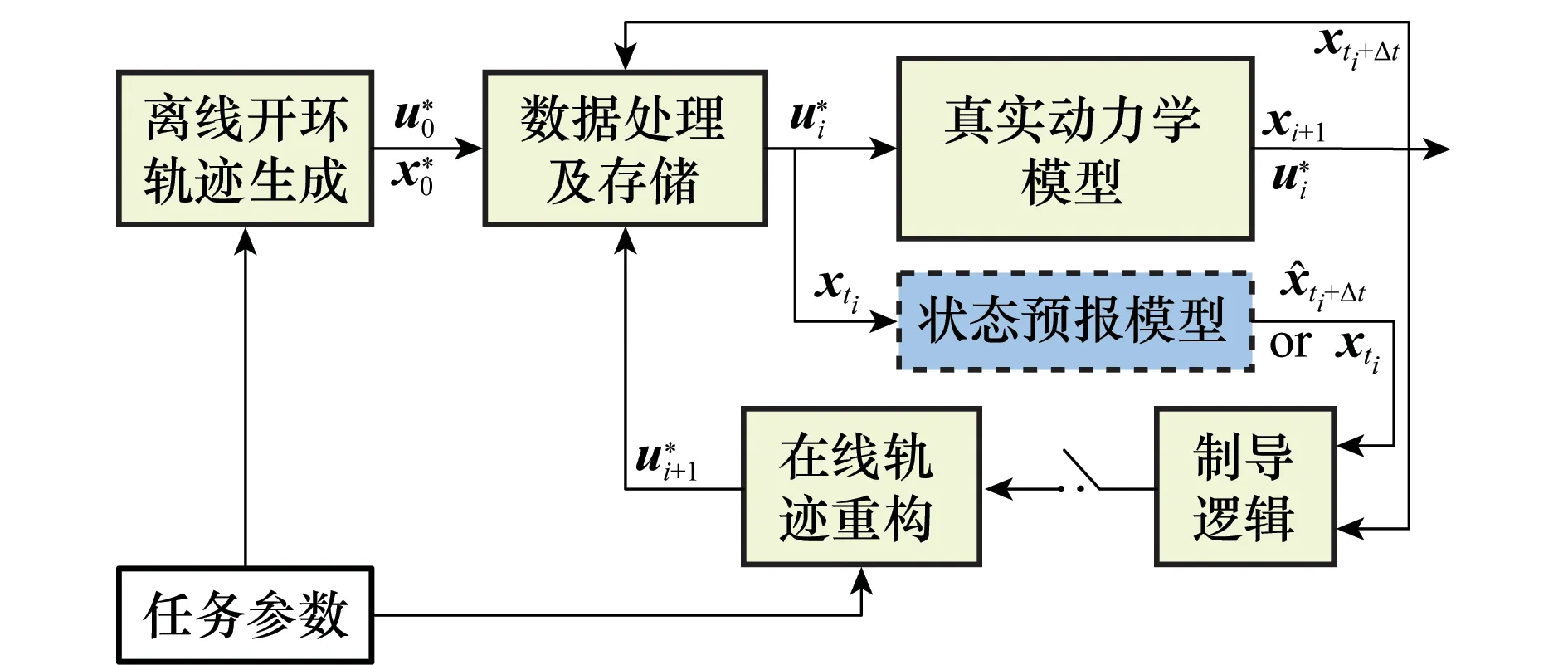
圖1 閉環(huán)近最優(yōu)制導策略框圖Fig.1 Closed-loop near optimal guidance frame
開環(huán)軌跡離線生成模塊通過離線解算,為首次在線軌跡重構提供初值,從而保證算法的計算效率和優(yōu)化收斂性能;數據處理及存儲模塊用于實現(xiàn)在線優(yōu)化結果的存儲和控制指令的映射插值;真實動力學模型模塊主要進行運動方程積分、狀態(tài)測量和飛行模擬;制導邏輯模塊則通過對狀態(tài)偏差的分析,完成是否執(zhí)行軌跡重構判斷;狀態(tài)預報模型模塊主要用于預報下一采樣時刻的狀態(tài)數據。其中,僅固定采樣反饋策略需要用到狀態(tài)預報模型。
2.2.1固定采樣反饋近最優(yōu)制導策略
設采樣周期為Δt,采樣時刻ti+1=ti+Δt。

步驟 2執(zhí)行制導算法控制邏輯模塊:

(20)
式中,范數‖·‖均取2范數‖·‖2進行計算。
對于終端狀態(tài)而言,有
(21)
對于過程狀態(tài)條件,有
(22)
ε偏差球由具體任務要求決定,同時取決于制導系統(tǒng)的硬件設備性能。
邏輯判斷執(zhí)行過程:若式(21)成立,意味著終端精度達到預定指標,閉環(huán)制導任務完成,即無需繼續(xù)執(zhí)行軌跡重構解算,而是保持當前制導指令變軌飛行至任務結束;式(21)不成立時,若式(22)成立,則表明當前測量狀態(tài)與前一次優(yōu)化狀態(tài)滿足偏差要求,則繼續(xù)積分運動方程而不進行軌跡重構,即轉到步驟1;否則,轉至步驟3;
2.2.2自適應采樣反饋近最優(yōu)制導策略
步驟 1與第2.2.1節(jié)步驟1相同。
步驟 2與第2.2.1節(jié)步驟2相同。


3 算例及分析
本節(jié)開展燃料最省近地軌道遠程空間交會制導仿真。表1給出了交會雙方航天器的軌道根數。其余仿真條件設置如下:追蹤航天器初始質量m0=1 000 kg,攜帶燃料質量mp=400 kg,有限推力發(fā)動機相關參數為比沖Isp=300 s,推力極值Tmax=500 N。

表1 相關初始軌道根數
仿真用臺式計算機配置:E7500/2.93GHzCPU,2G內存,編程環(huán)境為Matlab。初值生成器[7]的初始節(jié)點數目N1=5,離線及在線重構所用的多節(jié)點數目均取N2=25。基于序列二次規(guī)劃(sequencequadraticprogram,SQP)優(yōu)化軟件包SNOPT對該問題數值求解。
為了驗證本文制導算法的精度、魯棒性等性能,制導仿真重點考慮地球扁率J2攝動、計算誤差、預報誤差等影響,即軌跡重構和狀態(tài)預報不考慮J2攝動,而只在模擬實際飛行過程中考慮。固定采樣周期Δt需要結合任務要求和彈載計算機性能進行選擇。初步計算后,根據優(yōu)化計算需求,本文保守選取Δt=10s。由于無法真正獲取實際工程中對位置和速度偏差的精度要求,故人為選取了一組偏差球參數來驗證算法的有效性,其中,εrm=5m,εvm=0.05m/s,εrf=50m,εvf=0.5m/s。
表2給出了開環(huán)制導(用OL表示)、固定采樣反饋閉環(huán)制導(用FSP表示)、自適應采樣反饋閉環(huán)制導(用ASP表示)的仿真結果。飛行結束tf時刻的質量、位置及速度偏差分別用mf、Δrf、Δvf表示,Tg為閉環(huán)反饋制導連續(xù)軌跡重構結束時對應時刻,該時刻表征了制導解算的結束時間。圖2給出了部分情況對應的狀態(tài)軌跡、制導指令結果對比。
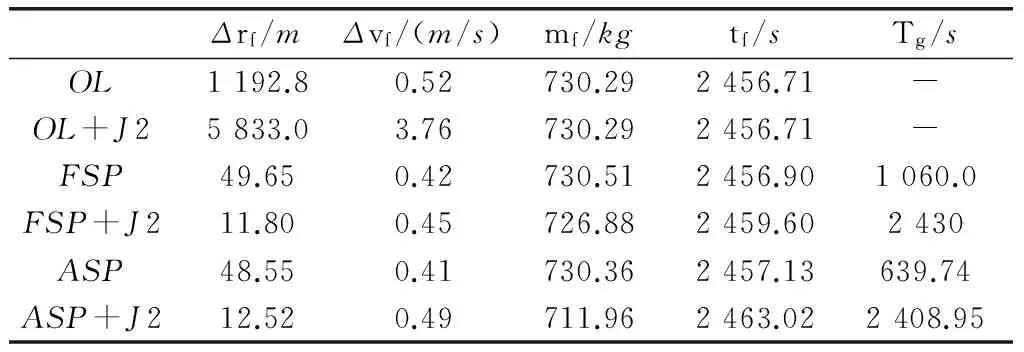
表2 不同制導策略的仿真結果
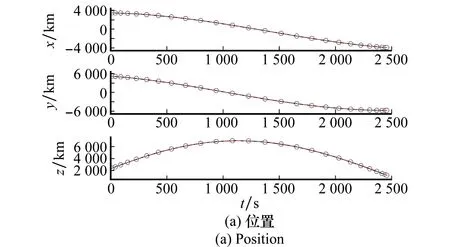
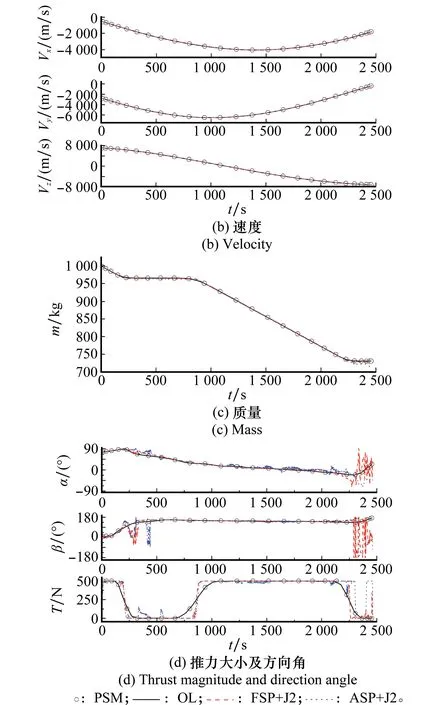
圖2 不同情況的制導仿真結果對比Fig.2 Results comparison of different guidance schemes
由表2可知,采用離線軌跡優(yōu)化得到的控制指令進行開環(huán)制導,無論有無J2攝動交會誤差均較大,考慮J2影響時位置和速度誤差分別達到5 833m和3.76m/s。究其原因,主要有以下幾方面:①軌跡優(yōu)化所用離散節(jié)點數目較少;②積分計算等數值誤差的積累;③最優(yōu)控制曲線的光滑程度較差、對其插值所用方法精度較低。
通過表2不難發(fā)現(xiàn),兩種閉環(huán)制導策略交會精度得到顯著提高,均滿足所設定的偏差球要求,即位置偏差不大于50m,速度偏差不大于0.5m/s,但為了修正制導誤差,二者交會時間均有一定的增加。分析閉環(huán)制導策略可知,閉環(huán)制導一方面通過軌跡重構增加了積分過程所對應的優(yōu)化離散節(jié)點數目,另一方面,連續(xù)采樣和軌跡重構減小了積分計算誤差的積累,因此能夠彌補開環(huán)制導的前兩條不足,以提高制導精度。由表2亦可知,對于閉環(huán)制導策略而言,在滿足速度偏差要求時,有無J2攝動的位置誤差不同,如對于ASP閉環(huán)制導而言,無J2攝動的位置誤差為48.55m,而有J2攝動時為12.52m。分析可知,考慮J2攝動時,對于所設定的偏差球誤差要求,位置誤差收斂速度較快,待位置誤差滿足要求后,繼續(xù)進行軌跡重構計算,直至速度誤差滿足要求,此時位置誤差已得到進一步改善。
由圖2(d)可知,閉環(huán)制導對應的控制指令連續(xù)性和光滑性較差,其局部放大圖如圖3所示。實際上,除了燃料最優(yōu)所具有的近似“bang-bang”控制特性外,控制指令的不連續(xù)和非光滑性體現(xiàn)了攝動和計算誤差的影響。由于攝動和誤差的存在,連續(xù)采樣和軌跡重構得到的開環(huán)控制初始條件與上一次最優(yōu)解并不一致,故使得閉環(huán)制導控制指令存在明顯的不連續(xù)和不光滑,這也體現(xiàn)了閉環(huán)制導對開環(huán)最優(yōu)控制的不斷修正。考慮有些實際任務對控制指令光滑性要求較高,可以通過引入控制指令變化率約束,并在采樣點施加連續(xù)性條件加以改進。
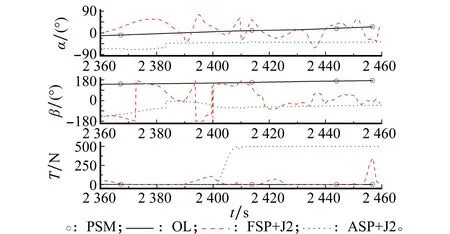
圖3 控制指令局部放大圖Fig.3 Local enlarged drawing of control command
此外,分析表2及圖2可知,ASP策略制導精度誤差收斂速度優(yōu)于FSP策略,對應燃耗和交會時間則具有劣勢。不考慮J2攝動時,ASP策略在進行639.74s制導計算后即可保證以給定精度完成交會任務,而FSP策略制導計算時間則為1 060s,即前者比后者提前420.26s完成制導解算任務,若考慮J2攝動,提前時間為21.05s。相應地,與FSP策略相比,ASP策略燃耗代價較大,分別增加0.15kg和14.92kg。與此同時,ASP策略所需的交會時間有一定的增加,分別增大0.23s和3.42s。
表3給出了不同制導策略連續(xù)軌跡重構的CPU耗時統(tǒng)計結果,可見,兩種制導策略的單次CPU耗時最大值tmax均不超過10s,平均CPU耗時tave均小于1s,具有較好的實時性和在線應用潛力;ASP策略軌跡重構次數Iter較多,但單次CPU耗時較小,故在保證反饋更新周期自適應調整的同時,具有更好的在線應用潛力。
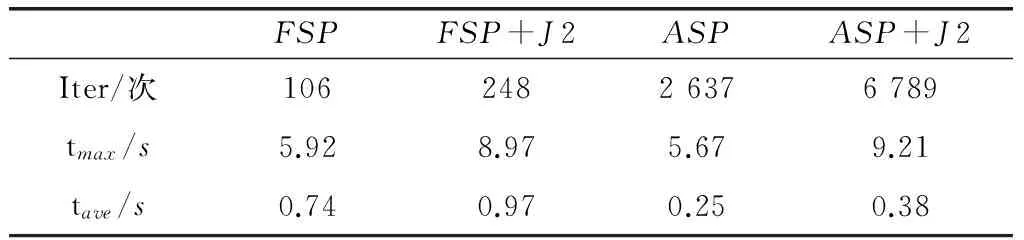
表3 閉環(huán)制導軌跡重構CPU耗時統(tǒng)計
可見,ASP制導策略具有更高的自主性,精度誤差收斂性優(yōu)于FSP策略,但燃耗代價偏大,所需交會時間偏長;單次CPU耗時較少,但軌跡重構次數較多,計算量偏大。因此,可結合交會精度誤差收斂速度、燃耗、交會時間、軌跡重構次數和單次CPU耗時等要求進行閉環(huán)制導策略的選擇應用。
4 結 論
基于采樣反饋控制理論和軌跡重構算法,針對空間遠程交會問題,本文設計了兩種閉環(huán)近最優(yōu)制導策略。仿真結果表明:
(1) 與傳統(tǒng)的軌跡跟蹤制導方法不同,本文的兩種閉環(huán)制導策略均無需進行參考軌跡跟蹤和控制增益調整,而是通過在線軌跡重構技術進行閉環(huán)指令反饋更新,以實現(xiàn)對地球扁率J2攝動偏差和計算誤差影響的修正,而改進的偽譜軌跡優(yōu)化算法保證了軌跡重構的實時性能,故所提閉環(huán)制導策略具有較高的精度,較好的自主性、魯棒性和實時性,以及在線應用潛力;
(2)ASP制導策略的采樣時間可隨飛行狀態(tài)進行自適應調整,具有更高的自主性,精度誤差收斂性優(yōu)于FSP策略,但燃耗代價偏大,所需交會時間偏長,軌跡重構次數較多,計算量偏大,因此在應用時需要根據具體情況進行選擇。
[1]ZarchanP.Midcouseguidancestrategiesforexoatmosphericintercept,AD-A355820[R].CambridgeMA:CharlesStarkDraperLaboratory, 1998.
[2]ChenF,XiaoYL,ChenWC.Guidancebasedonvelocity-to-be-gainedsurfaceforsuper-rangeexoatmosphericintercept[J].Acta Aeronautica et Astronautica Sinica, 2010, 31(2): 342-349. (陳峰, 肖業(yè)倫, 陳萬春. 基于需用速度增益曲面的大氣層外超遠程攔截導引方法[J].航空學報, 2010, 31(2): 342-349.)
[3]NewmanB.Strategicmidcourseguidanceusingmodifiedzeroeffortmisssteering[J].Journal of Guidance, Control, and Dynamics, 1996, 19(1): 107-112.
[4]ShangHB,CuiPY,LuanEJ.Guidancestrategyforlow-thrusttransfertrajectoriesbasedonoptimalstatesfeedbacktechnology[J].Journal of Jilin University, 2007, 37(4): 949-954. (尚海濱, 崔平遠, 欒恩杰. 基于最優(yōu)狀態(tài)反饋的小推力轉移軌道制導策略[J].吉林大學學報, 2007, 37(4): 949-954.)
[5]ZhuZX,JinW,HanP.Anewguidancemethodusinglinearizedgravitationalfield[J].Journal of Northwestern Polytechnical University, 2012, 30(2): 181-186. (朱戰(zhàn)霞, 金偉, 韓沛. 一種基于引力場線性化的制導方法[J].西北工業(yè)大學學報, 2012, 30(2): 181-186.)
[6]GaoY,LiWQ.Systematicdirectapproachforoptimizingcontinuous-thrustearth-orbittransfers[J].Chinese Journal of Aeronautics, 2009, 22(1): 56-69.
[7]YanXL,LiaoSY,ZhangJS,etal.Trajectoryoptimizationusingpseudospectralmethodbasedonagridnodesrefinementstrategy[J].Journal of Astronautics, 2013, 34(7): 891-900. (閆循良, 廖守億, 張金生, 等. 基于節(jié)點改善策略的偽譜軌跡優(yōu)化[J].宇航學報, 2013, 34(7): 891-900.)
[8]RossIM,SekhavatP,FlemingA,etal.Optimalfeedbackcontrol:foundations,examples,andexperimentalresultsforanewapproach[J].Journal of Guidance, Control, and Dynamics, 2008, 31(2): 307-321.
[9]RossIM,GongQ,FahrooF,etal.Practicalstabilizationthroughreal-timeoptimalcontrol[C]∥Proc. of the American Control Conference, 2006:1-6.
[10]YanH,RossIM,AlfriendKT.Pseudospectralfeedbackcontrolforthree-axismagneticattitudestabilizationinellipticorbits[J].Journal of Guidance, Control, and Dynamics, 2007, 30(4): 1107-1115.
[11]BollinoKP,RossIM.Apseudospectralfeedbackmethodforreal-timeoptimalguidanceofreentryvehicles[C]∥Proc. of the IEEE American Control Conference, 2007: 3861-3867.
[12]ZhangYA,WangLY,ZhaoGR.Pseudospectral-basedfreesamplingreal-timeoptimalfeedbackcontrolanditsapplication[J].Control Theory & Applications, 2012, 29(9): 1151-1156. (張友安, 王麗英, 趙國榮. 基于偽譜法的自由采樣實時最優(yōu)反饋控制及應用[J].控制理論與應用, 2012, 29(9): 1151-1156.)
[13]YanXL,LiaoSY,HeT,etal.Modifiedpseudospectralfeedbackcontrolbasedclosed-loopguidanceforlong-rangeorbitmaneuver[J].Journal of Astronautics, 2016, 37(1): 84-93. (閆循良, 廖守億, 何泰, 等. 基于改進偽譜反饋控制的遠程變軌閉環(huán)制導[J].宇航學報, 2016, 37(1): 84-93.)
[14]GargD,PattersonMA,HagerWW.Anoverviewofthreepseudospectralmethodsforthenumericalsolutionofoptimalproblems[J].Adances in the Astronautical Sciences,2009,135:1-17.
[15]RossIM,GongQ,SekhavatP.Low-thrust,high-accuracytrajectoryoptimization[J].Journal of Guidance, Control, and Dynamics, 2007, 30(4): 921-933.
Sampled-data feedback control for near optimal guidance via pseudospectral trajectory reconfiguration
YAN Xun-liang, LIAO Shou-yi, WANG Shi-cheng
(DepartmentofControlEngineering,RocketForceUniversityofEngineering,Xi’an710025,China)
Two closed-loop near optimal guidance schemes, which are based on sampled-data optimal feedback control and pseudospectral trajectory reconfiguration, are studied and proposed for long-range rendezvous with finite thrust. They are defined respectively as the fixed sampling period(FSP) feedback and adaptive sampling period(ASP) feedback schemes according to different sampling period. Firstly, the dynamics model and fuel-optimal guidance problem are described. Combining the characteristics of the dynamics model with the pseudospectral method, a computational efficiency refinement method with the reduced state parameters, is proposed to improve the efficiency of trajectory optimization. Starting from the sampled-data optimal feedback control theory, the control command for closed-loop guidance can be updated and fed back continuously through successive trajectory reconfiguration using sampled data. The Simulation results indicate that the algorithms can not only supply excellent near optimal solution for practical mission, but can manage numerical errors, disturbances, and the J2 perturbation. Furthermore, the adaptive sampling period guidance scheme is not only more autonomous, but it has a better convergence for guidance accuracy with higher computation and fuel expense. Consequently, a favorable decision should be made for two schemes in application.
long-range rendezvous; closed-loop guidance; near optimal guidance; sampled-data feedback; pseudospectral trajectory reconfiguration
2015-06-03;
2016-03-23;網絡優(yōu)先出版日期:2016-06-22。
中國博士后科學基金特別項目(2014T70974)資助課題
V 421.4
A
10.3969/j.issn.1001-506X.2016.09.23
閆循良(1984-),男,講師,博士,主要研究方向為飛行動力學與控制、制導及軌跡優(yōu)化。
E-mail:xly_nwpu@126.com
廖守億(1974-),男,副教授,博士,主要研究方向為飛行器制導、復雜系統(tǒng)建模與仿真。
E-mail:6127725@qq.com
王仕成(1962-),男,教授,博士,主要研究方向為飛行器制導、控制與仿真。
E-mail:wsc@vip.163.com
網絡優(yōu)先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160622.1118.002.html
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14