基于多段地磁傳感器的高速公路收費站車輛排隊長度檢測算法
2016-09-08 08:56:34李彬亮韓國華
中國新通信 2016年15期
李彬亮 韓國華
【摘要】 針對交通管理部門對車輛排隊長度智能化管控的迫切要求,本文提出了一種基于多段地磁傳感器的高速公路收費站排隊長度檢測算法。通過研究駕駛員的行為習慣及車輛跟馳行駛中特點,本文對車輛跟馳行駛區與自由行駛區、跟馳行駛區與逼近前車區的速度臨界值進行了界定,分析了車輛通過地磁傳感器時速度的動態變化規律,并基于地磁傳感器關鍵數據的相關性分析,提出了均速模型。最后利用現場試驗對本檢測算法進行驗證,試驗結果證明本文提出的均速模型能夠有效的估計高速公路收費站前車輛排隊長度,且地磁裝置成本低廉、布設方便,能夠大規模的推廣應用,為交通管理部門實時監控交通運行情況提供幫助。
【關鍵詞】 地磁傳感器 高速公路收費站 排隊長度檢測 跟馳行駛 均速模型
引言:
隨著經濟不斷發展,我國大中城市機動車保有輛也在不斷攀升,截止到2015年底,深圳市機動車保有量超過320萬輛[1],車輛密度達到481輛/公里,遠超270輛/公里的國際警戒線,日益增多的機動車使得城市交通壓力與日俱增。研究車輛排隊長度,可以有效反映城市交通運行情況,輔助交通管理部門分析決策,從而緩解城市交通擁堵以及由此帶來的交通安全等問題。目前我國車輛排隊長度檢測方法大體可以分為三類:
通過設置磁感線圈、微波探測器、雷達等傳統交通監測設備進行排隊長度檢測及計算。
通過GPS數據對車輛排隊長度進行檢測。
通過視頻數據對車輛排隊長度進行檢測。視頻檢測成本低、覆蓋范圍廣、受環境影響小,準確度也相對較高,其理論誤差可以控制在8%以內[1]。
相對于以上三類車輛排隊長度檢測方式,地磁傳感器安裝尺寸小、靈敏度高、使用壽命長、對路面破壞小,且其探測機制主要利用地球磁場在鐵磁物體通過時的變化進行檢測,對環境要求較低,能夠準確的識別車輛存在和通過車型。目前我國基于地磁傳感器的車輛排隊長度算法研究相對較少,其中張永終等人融合地磁檢測方法設計了一種多傳感器融合檢測系統,實現了對各方向排隊長度的檢測[2];賈利民等人根據單個地磁傳感器數據反饋的車輛經過時長、車頭車尾時距等動態變化規律,提出了車尾時距模型、通過時間模型和綜合模型,為排隊長度檢測提供了一個新的算法[3]。本文基于地磁傳感器在高速公路收費口的實際應用,利用多車道車輛通過距離收費站200m,125m,50m地磁傳感器時的波形、時長等關鍵信息,提出了一種的新的車輛排隊長度算法。為交通管理部門及高速公路企業提供了數據支撐和決策參考。
一、多段地磁傳感器排隊長度檢測方法
1.1 問題分析
高速公路收費站前的車輛排隊行為符合車輛跟馳特點,同時由于高速公路收費站口對車輛排隊長度的硬性要求以及高速公路交通流的自身特點,其車輛排隊行為又具有一定的特殊性。本文以車輛跟馳行為為基礎,對高速公路收費站前車輛排隊情況進行類比描述。
假定所有駕駛員行為符合MISSION模型,車輛在進入收費站排隊過程中分別經過無反應區(可自由行駛段),無意識反應區(跟馳行駛區)以及有意識反應區(逼近前車區),車輛跟馳行駛情況如圖1。
根據Hodfs的調查,駕駛員在高速行車中會低估安全距離,在實際交通中,距離與速度不成正比[4]。故假定車輛在無反應區行駛時勻速行駛;進入無意識反應區后將根據前車減速情況開始減速,視作勻減速階段;進入有意識反應區時,車速隨著車頭間距減小而減小,視作變減速階段。通過在收費站前有間隔的設置地磁傳感器,可以有效的獲得車輛通過地磁傳感器時的波形、時長等各項數據變化情況,從而判斷不同階段車輛的實際行駛行為,最后估算出收費站前車輛的排隊長度。
1.2 參數選取
受制于地磁特點和傳感器埋設方式等條件影響,當出現車輛經過地磁傳感器所在斷面變換車道、車輛以非正常行車方式在道路上行駛(如兩條道路之間行駛)以及地磁斷面1至地磁斷面4之間出入口不唯一(如存在岔路)等情況時,會導致地磁傳感器漏檢、多檢以及傳輸數據出現噪聲數據,無法精確反映車輛通過情況。
故在前期實驗中本文抽取了7天地磁數據樣本,并對樣本中各項數據與排隊長度的相關性以及樣本數據本身的容錯性進行了估算,其中:
為了確定樣本的有效性,在前期實驗中,以基于微波檢測的深圳市非節假日、高速公路同一路段的不同時間車輛行駛數據的均值作為標準,對抽取的數據樣本進行獨立μ檢驗,設顯著水平ɑ = 5%。
各項特征數據與排隊長度的相關性采用Spearman秩相關檢驗,即:將數據樣本X與對應的排隊長度樣本Y配對形成(x1,y1),(x2,y2) (xn,yn),并將它排序,根據兩個順序樣本的秩(Ri和Si)得到n對秩:(R1,S1)(R2,S2) (Rn,Sn)。有相關系數:
1.3 測距與閾值選取
根據MISSION模型,車輛在進入跟馳行駛區之前和逼近前車區時存在兩個DV值(速度閾值),即SDV(駕駛員意識到正在靠近一輛低俗行駛車輛的臨界點)與CLDV(跟馳過程中駕駛員意識到速度差很小但仍然靠近前車的臨界點)。
為了準確的得到車輛在自由行使區、跟馳行駛區以及逼近前車區的相關數據,實驗將地磁斷面埋設間隔設置為50m,125m,200m。當車輛進入收費站200m檢測范圍內時,駕駛員將根據收費站前車輛排隊情況進行減速,其中地磁斷面車速判斷閾值與兩個臨界值SDV與CLDV動態相關。
根據駕駛行為的不同程度,在有預期的平緩減速狀態下,減速度的通常上限值在-2到-2.6M/S2之間。同時,受到駕駛員與車輛特性的共同制約,駕駛員從施加操縱力到出現操縱力的時間約為0.04s,駕駛員的反應時間參照表2。
表2 駕駛員反應時間及小客車制動系協調時間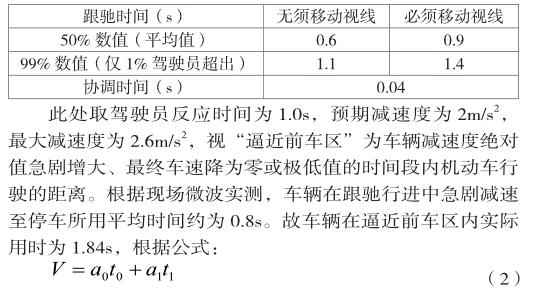
可以估算出車輛進入逼近前車區時的臨界速度CLDV約為4.16m/s,故3道地磁存在一個共同的擁堵閾值fb,逼近前車區內車輛速度不高于fb,即15km/h。
同理,3道地磁受到測距(埋設點至上一埋設點的距離)遠近影響,對應存在2個的暢通閾值fub,即車輛進入跟馳行駛區的臨界速度SDV。根據現場微波實測,車輛在進入收費站200m檢測區域時均處于減速狀態,平均減速度約為0.68m/ s2,根據公式:
二、實例分析
2.1 實驗數據
實驗選取2015年8月2日0時至24時全天的視頻檢測數據數據進行參照。地磁檢測系統每5分鐘提取一次斷面的平均車速(平均車速=每5min內通過車輛速度總和/通過車輛數 ),剔除掉高于120km/h的異常數據后,可得以時間為X軸,各地磁斷面平均車速為Y軸統計圖(圖中D2、D3、D4速度分別為斷面2、3、4的平均時速,橫坐標288個刻度為5分鐘間隔序號)。
根據均速模型算法,地磁檢測的排隊長度與視頻實時排隊長度對比如圖4(虛線為地磁檢測數據,實線為視頻檢測數據)。根據Spearman秩相關檢驗法,得地磁檢測排隊長度與視頻檢測排隊長度相關度達92.3%,實驗結果達到預期值。
2.2 結果分析
由上述實驗結果可以得出,本文提出的均速模型與現場視頻檢測結果高度吻合,綜合實驗中出現的異常情況,該均速模型受到的客觀干擾主要存在以下兩個方面:(1)收費站前不同車道車型不統一,需要結合車型識別對車輛經過斷面產生的相對車速進行改良,減少測速擾動;(2)受到駕駛員行為影響,車輛會自動變道尋找排隊長度最短車道。
在收費站前排隊長度較短情況下,車輛經過外圍兩道地磁斷面時有可能出現變道情況,帶來測速異常高值,需要進一步在均速計算中剔除明顯異常高值。由于受到算法影響,在斷面2、3存在異常高值情況時一般在距離收費站口較近的斷面1不存在車輛變道情況(已經選好車道),故對系統判斷車輛真實排隊長度不產生影響,魯棒性強。
另外,本文提到的收費站口排隊長度檢測系統可以進一步推廣到城市交叉口信號檢測中,結合平均車速直接辨別有利于直接判別擁堵情況,無需復雜的算法和數據處理,對處理器運行能力要求較低,便于推廣。
三、結束語
結合跟馳模型中車輛行進行為以及MISSION模型對駕駛員行為的研究,得到了基于地磁傳感器判別車輛行進情況的擁堵、暢通閾值,形成了對車輛排隊長度有效估計的均速模型。
通過現場試驗,證明了該模型的有效性。與傳統視頻檢測、浮動車檢測、微波檢測方法相比,本文提出的排隊長度算法更為簡單,易于實現。另外地磁傳感器成本低廉,安裝方便,有利于快速推廣。
參 考 文 獻
[1] 楊永輝,黃磊,劉昌平.基于視頻分析的車輛排隊長度檢測[J].計算機應用研究,2011,28(3):1037-1041.
[2] 張永終,張軍強,喬志龍.基于多傳感器融合的排隊長度檢測系統設計[J].道路交通與安全,2015,15(3):23-28.
[3] 賈利民,陳娜,李海艦,董宏輝.基于單個地磁傳感器融合的交叉口排隊長度估計[J].吉林大學學報(工學版),2015,5,8(網絡優先出版).
[4] Wiedemann R, Reiter U. Microscopic Traffic Simulation:The Simulation System MISSION. Background and Actual State CEC Project ICARUS(V1052),Final Report,1992.
[5] Ceder A. A Deterministic Traffic Flow Model for the Two Regime Approach. Transportation Research Record,1976,567.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產業(2016年3期)2016-05-17 04:32:12
