機器人輔助腹腔鏡腎盂成形術與腹腔鏡術式療效和安全性的Meta分析
2016-09-22 08:52:56張誠成建軍張建東任瑞民張克張雁鋼
世界復合醫學 2016年1期
張誠,成建軍,張建東,任瑞民,張克,張雁鋼
1.山西醫科大學,山西太原 030001;2.山西醫學科學院 山西大醫院泌尿外科,山西太原 030000
機器人輔助腹腔鏡腎盂成形術與腹腔鏡術式療效和安全性的Meta分析
張誠1,成建軍2,張建東2,任瑞民2,張克1,張雁鋼2
1.山西醫科大學,山西太原 030001;2.山西醫學科學院 山西大醫院泌尿外科,山西太原 030000
目的 比較機器人輔助腹腔鏡腎盂成形術 (Robot-assisted and laparoscopic pyeloplasty,RALP)與腹腔鏡腎盂成形術(Laparoscopic pyeloplasty LP)兩種手術方式治療腎盂輸尿管連接部梗阻的療效及安全性。 方法 檢索 2002年 1月—2014年12月國內外公開發表的有關于RALP與LP比較的相關研究性文獻。由2名評價者對所納入的相關文獻的研究質量進行共同評價。使用Rev-Man 5.3軟件進行數據處理。 結果 本篇 Meta分析共納入了 10篇文獻,共納入 497例患者,其中 RALP組 259例,LP組 238例。 Meta分析結果提示,在縫合時間(WMD=-13.06,95%CI﹣22.54~-3.58,P=0.007)、住院時間(WMD=-1.40,95%CI-2.04~-0.76,P<0.0001)和術后并發癥率(OR=0.53,95%CI 0.29~0.98,P=0.04)方面,RALP優于 LP,差異有統計學意義(P<0.05)。在手術時間、術中失血量、和手術成功率方面,RALP與LP之間差異無統計學意義(P>0.05)。 結論 與LP相比,RALP在縫合時間、住院時間、術后并發癥率方面更具優勢。
腎盂輸尿管連接部梗阻;腎盂成形;腹腔鏡;機器人;Meta分析
腎盂輸尿管連接部梗阻 (ureteropelvic junction obstructionUPJO)是小兒及青少年期腎積水常見原因,且大部分為先天性疾病。 UPJO引起尿液流出道梗阻,導致尿液無法從腎盂進入輸尿管,如果不采取治療或干預措施,隨著腎積水的加重腎功能會進行性下降。 UPJO治療的主要目的是解除梗阻,保護患者腎功能[1]。其矯正手術在許多方面已經開展,包括開放手術、內腔鏡手術、腹腔鏡手術、機器人輔助腹腔鏡手術[2]。開放行腎盂成形術曾是治療UPJO的金標準,其治療成功率為 90% 左右[3]。但開放手術患者術后恢復較慢,在過去 20年里,UPJO的微創治療得到了快速發展及推廣。 LP作為一種微創治療,具有高成功率、創傷小、疼痛小、住院時間短、術后恢復快等優點逐步替代了開放手術而成為治療 UPJO的金標準[4,5],其成功率達 86%~98%[6]。 RALP作為一門新興技術,不僅具有腹腔鏡腎盂成形術的諸多優點,還具有成像效果更好,學習曲線短等優勢[7]。但與 LP相比哪種更好,多個醫學中心的研究結論并不一致,尚有爭議。國內外已有相關文獻報道了二者之間的對比性研究。為此,本文采用Meta分析方法對二者進行評價,以期為 UPJO的治療方法選擇提供更好依據。
1 資料與方法
1.1 資料來源與文獻檢索根據
Cochrane協作網檢索手冊的要求制定檢索策略。①計算機檢索 :包括 2002年 1月—2014年 12月國內外公開發表的有關于機器人輔助腹腔鏡腎盂成形術與腹腔鏡術式比較的相關研究性文獻。 選擇 PubMed、ScineceDirect、Cochrane library、EMBASE、中國知網文獻數據庫、維普及萬方數據庫等為數據庫。中文以腎盂輸尿管連接部梗阻、腎盂成形術、腹腔鏡、機器人輔助腹腔鏡為關鍵詞進行檢索;英文以 ureteropelvic junctionobstruction,pyeloplasty,laparoscopy,robot為關鍵詞進行檢索。同時對檢索出文獻的參考文獻進行分析,以便于發現可能納入本次研究的文獻。
1.2 文獻納入與排除標準
①患者均為首次治療的 UPJO患者,且都有腎盂成形術的治療指征。②文獻均對比RALP與LP兩者之間療效的差異。③研究設計為隨機對照試驗或隊列研究(前瞻性或回顧性)。④文獻中至少涉及了手術時間、縫合時間、術中失血量、住院時間、術后并發癥及手術成功率這 6個指標中的 1個。⑤文獻中連續性變量指標至少有一項含有標準差。
1.3 文獻的篩選及資料的提取
①根據納入與排除標準篩選相關文獻,運用雙人平行摘錄法,分別由兩個研究員完成,并采取交叉審核,意見不同時可通過討論解決或由第三者裁決。數據提取包含文獻的基本信息、患者數量、干預措施以及結局指標等。②文獻質量評價:使用適用于非隨機對照試驗的 Newcas tle-Ottawa Scale(NOS)文獻質量評價量表進行評價[8]。7~9分認為是高質量文獻,低于7分認為是低質量文獻。
1.4 統計方法
采 用Cochrane協 作 網 推 薦 使 用 的 Rev-Man5.3軟件 進 行Meta分析,主要分析RALP和LP兩種術式的手術時間、縫合時間、術中失血量、住院時間、術后并發癥率、手術成功率。二分類變量以優勢比 (OR)作為分析統計量;連續性變量以均數差(WMD)作為分析統計量。各效應量都以 95%置信區間 (CI)表示,P<0.05為差異有統計學意義。異質性檢驗采用 χ2檢驗,無異質性(P>0.1且 I2<50%)數據采用固定效應模型,異質性(P<0.1或 I2>50%)數據運用敏感性分析找出異質性產生原因,如果無臨床異質性,采用隨機效應模型。如存在臨床異質性,可根據異質性產生來源做亞組分析,如果具有明顯異質性,僅采用描述性研究。
2 結果
2.1 納入文獻的特征
共檢索到相關文獻 1305篇,其中外文文獻 893篇,中文文獻 412篇,閱讀標題和摘要后篩選出 19篇,進一步閱讀全文,根據納入排除標準最終納入了,10篇文獻,其中國內文獻 2篇,國外文獻 8篇[9-18]。共納入 497例患者,其中行RALP 259例,行 LP 238例。納入的研究文獻均未描述隨機分組方法以及是否采用盲法。1篇為前瞻性隊列研究[9],其余 9篇均為回顧性隊列研究[10-18],對納入的非隨機對照試驗采用適用于非隨機對照試驗的 NewcastleOttawa Scale(NOS)文獻質量評價量表進行評價,結果見表1。其中 7篇文獻質量較高,3篇文獻質量較低。
2.2 Meta分析結果
2.2.1 手術時間
其中 9篇文獻[9,11-18]以均數和標準差形式統計了兩組所需的手術時間。對納入的文獻進行異質性分析提示存在異質性(P<0.00001,I2=95%),但無臨床異質性,采用隨機效應模型。結果顯示RALP與LP手術時間差異無統計學意義(WMD=-10.73,95%CI 29.66~8.19,P>0.05)。見圖1。
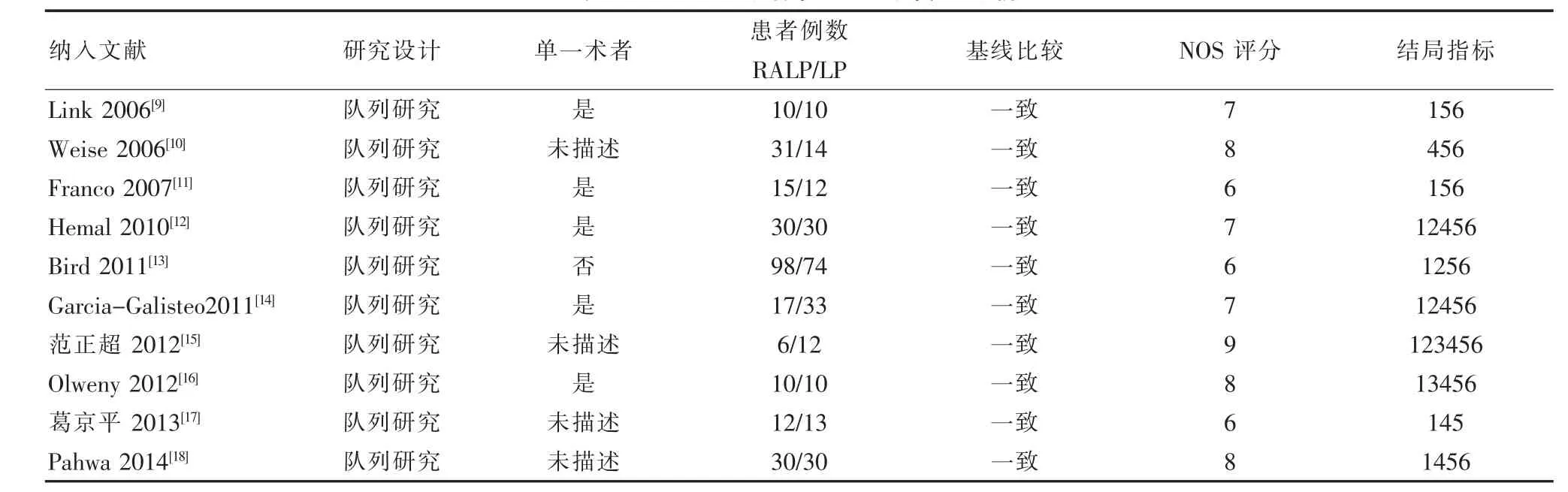
表1 納入文獻特征及文獻質量評價

圖1 RALP與LP手術時間比較
2.2.2 縫合時間
其中 4篇文獻[12-15]以均數和標準差形式統計了兩組中縫合時間,對納入的文獻進行異質性分析提示存在異質性(P<0.00001,I2=91%),但無臨床異質性,采用隨機效應模型。結果顯示在腎盂輸尿管縫合時間方面 RALP術式優于 LP術式,差異有統計學意義(WMD=-13.06,95% CI-22.54~-3.58,P<0.05)。見圖 2。

圖2 RALP與LP術中縫合時間比較
2.2.3 術中失血量
有 2篇文獻[15,16]以均數和標準差形式統計了兩組患者的術中失血量,對納入的文獻進行異質性分析提示不存在異質性(P=0.40,I2=0%),采用固定效應模型。結果提示在術中失血量方面,差異無統計學意義 (WMD=4.07,95%CI-6.44~14.58,P>0.05)。見圖 3。

圖3 RALP與LP術中失血量比較
2.2.4 住院時間
有 7篇文獻[10,12,14-18]以均數和標準差形式統計了兩組患者的住院天數,對納入的文獻進行異質性分析提示存在異質性 (P<0.0001,I2=91%),但無臨床異質性,采用隨機效應模型。結果顯示RALP術式患者住院時間短于LP術式,差異有統計學意義(WMD=-1.40,95%CI-2.04~-0.76,P<0.05)。見圖 4。

圖4 RALP與LP術后患者住院時間比較
2.2.5 術后并發癥
所有文獻均統計了術后并發癥,對納入的文獻進行異質性分析提示不存在異質性 (P=0.63,I2=0%),采用固定效應模型。結果提示RALP優于LP,RALP術后并發癥率較小,差異有統計學意義(OR=0.53,95%CI0.29~0.98,P<0.05)。見圖 5。

圖5 RALP與LP術后并發癥比較
2.2.6 手術成功率
9篇文獻[9-16,18]統計了手術成功率,對納入的文獻進行異質性分析提示不存在異質性 (P=0.95,I2=0%),采用固定效應模型。結果提示在手術成功率方面,差異無統計學意義(OR=1.17,95%CI 0.53~2.57,P>0.05)。見圖 6。

圖6 RALP與LP手術成功率比較
2.3 發表偏倚
對納入研究的 10篇文獻經過分析顯示,漏斗圖是基本對稱的,可認為無明顯的發表性偏倚存在。見圖 7。

圖7 納入文獻發表偏倚的漏斗圖
3 討論
2014 年Autorino等[19]對9篇隊列研究進行了Meta分析,其分析結果表明在手術時間、住院時間方面,RALP組優于 LP組,在手術成功率及術后并發癥率方面差異無統計學意義,但其納入文獻質量較差,部分連續性變量指標缺少標準差及原始數據,而是通過極差粗略計算標準差后進行分析,使得結論說服力不足。除了剔除不含標準差的文獻,本篇Meta分析還加入了縫合時間及術中失血量的對比研究,證明了機器人輔助腹腔鏡技術在縫合方面的優勢。
由于個別指標分析時存在異質性,使用了隨機效應模型進行分析,分析結果相對保守,異質性的產生可能是由于個別醫學中心對結局指標判定的定義不盡相同、患者的年齡、腎盂積水的程度不同造成手術操作難度加大等因素。因此需要更高質量的研究來控制相關混雜因素從而使得分析結果更加可靠。
本Meta分析結果表明 RALP在手術時間方面與 LP差異無統計學意義,與 Autorino等人的研究結果不同,但從個別文獻數據可以看出,RALP手術時間優于 LP,可能是由于機器人系統視野更清晰,操作更靈活、精確,可消除手術過程中的生理振動,可控性更高,再者術者坐位操作,降低了疲勞程度[20]。但是機器人組裝和拆卸機器人系統相比腹腔鏡系統更為復雜,雖然機器人操作系統具有縫合快、視野清晰等操作優勢,使得操作時間明顯縮短,但是總的時間比較差別不大。在縫合時間方面,RALP顯著優于LP。可能是由于機器人系統視野為3D立體圖形,比較接近開放手術的情況,且機器人操作系統相比腹腔鏡更加靈活,其機械手腕擁有七個自由度,活動度達 90°,克服了腹腔鏡手術的缺陷,能夠使術者在深部及狹小的空間更加準確的縫合操作[20],因此明顯縮短縫合時間。術中失血量方面,二者差異無統計學意義,因二者都是微創手術,都具有微創手術出血少的優點。但納入的文獻較少,結論不足以說明兩者之間的差異。住院時間方面,RALP優于LP組,差異有統計學意義。可能由于RALP具有創傷更小、視野更加清晰,能夠最低限度降低副損傷[21],使得患者術后恢復時間較腹腔鏡術式更快。但是住院時間收到很多混著因素的影響,不同醫療機構對于患者術后管理措施不同以及患者能否出院的標準定義不同,因此 Meta分析的結果并不能充分說明 RALP的優勢。在并發癥方面,RALP組并發癥率較小,優于 LP組,差異具有統計學意義。可能是由于機器人操作系統縫合過程中視野更加清晰,縫合可靠性更強,術后吻合口瘺等并發癥相對較少。與 Autorino等人的研究也不相同。可能是由于個別術者手術技術不盡相同所致,也可能是由于其納入文獻質量較差所致。RALP與LP在手術成功率方面差異無統計學意義。與 Autorino等人的研究結果相同,但是其納入研究的隨訪時間相對較短,不能充分說明成功率的研究結果。
本 Meta分析仍然存在一些不足:①本研究所納入文獻缺乏前瞻性隨機對照試驗,全部為非隨機對照研究,且只有 5篇手術操作是由同一術者完成,4篇未報到是否手術操作是由同一術者完成,1篇文獻手術操作非同一術者完成。由于手術技術水平不盡相同,導致實施偏倚可能性較大。且各個醫學中心的手術對象不盡相同,有的研究對象是成人,有的研究對象是小兒或成人,可能會對分析結果的準確性造成一定影響,形成偏倚。②大多數所納入的文獻隨訪時間不夠長,導致手術成功率分析結果說服力不強。③由于各個醫學中心的統計結果表達方法不相同,部分文獻結果個別指標缺少標準差,并且原始數據無法獲得,從而導致相關指標分析時樣本量較少,所得結論說服力不強,分析結果出現偏倚。④由于所納入文獻都是已發表文獻,一些會議專題文獻或未發表的學位論文等“灰色文獻”中可能存在結論不同文章,使得發表偏倚不可避免。⑤本研究缺乏對手術費用的研究,當兩種術式效果差異不明顯時,手術費用是必須考慮的一個因素,但只有 1篇文獻描述了手術費用,無法進行 Meta分析。
綜上所述,RALP在縫合時間、住院時間、并發癥率方面優于 LP,在手術時間、術中失血量、手術成功率方面RALP與LP差異無統計學意義。本研究仍存在研選擇何種術式應根據費用、病人具體情況等綜合考慮,隨著機器人手術系統技術的發展及普及,以其操作靈敏,視野清楚,減輕疲勞程度、學習曲線較短的優勢,在泌尿外科的應用前景會越來越廣。
(3)方案4(優化Egeneralized&TC)與方案5(優化Edirect&TC)相比,雖然Edirect增加了4.05%,但Eindirect降低了12.90%,即,無論是多目標優化還是單目標優化,考慮廣義能耗的調度方案比直接能耗的調度方案,其Egeneralized更優。同時,方案4與方案5相比,方案4可有效降低加工輔助時間,TC降低了4.34%。
(
)
[1]吳階平.吳階平泌尿外科學[M].濟南:山東科學技術出版社,2004:544-547.
[2]Wein AJ,Kavoussi LR,Novick AC,et al.Campbell-WalshUrology[M].Tenth Edition.Philadelphia:Saunders,2011: 3212-3235.
[3]Scardino PT,Scardino PL.Obstruction at the ureteropelvicjunction[M].The Ureter.Springer New York,1981: 697-716.
[4]Bauer JJ,Bishoff JAYT,Moore RG,et al.Laparoscopic versus open pyeloplasty:assessment ofobjective and subjective outcome[J].The Journal ofurology,1999,162(3):692-695.
[5]Moon DA,El-Shazly MA,Chang CM,et al.Laparoscopicpyeloplasty:evolution of a new gold standard[J].Urology, 2006,67(5):932-936.
[6]Inagaki T,Rha KH,Ong AM,et al.Laparoscopicpyeloplasty:current status[J].BJU international,2005,95(s2):102-105.
[7]Van Batavia JP,Casale P.Robotic surgery of the kidneyand ureter in pediatric patients[J].Current urology reports,2013, 14(4):373-378.
[8]Wells GA,Shea B,O’connell D,et al.The NewcastleOttawa Scale(NOS)for assessing the quality ofnonrandomised studies in meta-analyses[J].2000.
[9]Link RE,Bhayani SB,Kavoussi LR.A prospectivecomparison of robotic and laparoscopic pyeloplasty[J].Annals of surgery,2006,243(4):486.
[10]Weise ES,Winfield HN.Robotic computer-assistedpyeloplasty versus conventional laparoscopicpyeloplasty[J].Journal of endourology,2006,20(10):813-819.
[11]Franco I,Dyer LL,Zelkovic P.Laparoscopic pyeloplastyin the pediatric patient:hand sewn anastomosis versusrobotic assisted anastomosis—is there a difference[J].The Journal of urology,2007,178(4):1483-1486.
[12]Hemal AK,Mukherjee S,Singh K.Laparoscopicpyeloplasty versus robotic pyeloplasty for ureteropelvic junction obstruction:a series of 60 cases performed by asingle surgeon[J].The Canadian journal of urology,2010,17(1): 5012-5016.
[13]Bird VG,Leveillee RJ,Eldefrawy A,et al.Comparisonof robot-assisted versus conventional laparoscopictransperitoneal pyeloplasty for patients with ureteropelvicjunction obstruction:a single-center study[J].Urology,2011,77(3): 730-734.
[14]García-Galisteo E,Emmanuel-Tejero E,Vílchez PN,et al. Comparison of the operation time and complicationsbetween conventional and robotic-assisted laparoscopicpyeloplasty[J].Actas Urológicas Espaolas(EnglishEdition),2011, 35(9):523-528.
[15]范正超,盧錦山,朱捷,等.經腹腔機器人輔助與后腹腔鏡下離斷式腎盂成形術的療效比較[J].中華泌尿外科雜志,2012,33(6):417-420.
[16]Olweny EO,Park SK,Tan YK,et al.Perioperativecomparison of robotic assisted laparoendoscopic singlesite(LESS) pyeloplasty versus conventional LESSpyeloplasty[J].European urology,2012,61(2):410-414.
[17]葛京平,湯昊,魏武,等.機器人輔助經腹腹腔鏡與后腹腔鏡離斷式腎盂成形術的比較研究[J].醫學研究生學報 , 2013,26(12):1272-1274.
[18]Pahwa M,Pahwa AR,Girotra M,et al.Defining the Prosand Cons of Open,Conventional Laparoscopy,and RobotAssisted Pyeloplasty in a Developing Nation[J].Advancesin urology,2014.
[19]Autorino R,Eden C,El-Ghoneimi A,et al.Robotassisted and laparoscopic repair of ureteropelvic junctionobstruction:a systematic review and meta-analysis[J].European urology, 2014,65(2):430-452.
[20]Van Batavia JP,Casale P.Robotic surgery of the kidneyand ureter in pediatric patients[J].Current urology reports,2013, 14(4):373-378.
[21]Chen CCG,Falcone T.Robotic gynecologic surgery:past,present,and future[J].Clinical obstetrics andgynecology,2009, 52(3):335-343.
Efficacy and Safety of Robot-assisted Laparoscopic Pyeloplasty and LaparoscopicPyeloplasty for Patients with Ureteropelvic Junction Obstruction:a Meta-analysis
ZHANG Cheng1,CHENG Jian-jun2,ZHANG Jian-dong2,REN Rui-min2,ZHANG Ke1,ZHANG Yan-gang2
1.Hanxi Medical University,Taiyuan,Shanxi Province,030001 China;2.Department of Urology,Shanxi Da Yi Hospital,Shanxi Academy of Medical Sciences,Taiyuan,Shanxi Province,030000 China
Objective To compare the efficacy and safety of robot-assisted laparoscopic pyeloplasty and laparoscopic pyeloplastyfor patients with ureteropelvic junction obstruction.Methods A systematic review of the literatures about comparing robot-assistedlaparoscopic pyeloplasty and laparoscopic pyeloplasty were performed from January 2002 to December 2014.Two researchersevaluated the quality of included studies.Data were analyzed by Rev-Man5.3 software.Results Ten controlled clinical studies wereconcluded,including 497 patients(259 in RALP group and 238 in LP group).Meta-analysis suggested that the difference existed insuturing time(WMD=﹣13.06,95%CI﹣ 22.54~﹣ 3.58,P=0.007),hospital stay(WMD=﹣ 1.40,95%CI﹣ 2.04~-0.76,P<0.0001)and complication rate(OR=0.53,95%CI 0.29~0.98,P=0.04),It seemed that the RALP was prior to the LP.Therewas no significant difference in operative time,blood loss and success rate(P>0.05).Conclusion RALP demonstrated had moreadvantages in suturing time,hospital stay,Complication rate than those in LP.
Ureteropelvic junction obstruction;Pyeloplasty;Laparoscopy;Robot;Meta-analysis
R691.2
A doi 10.11966/j.issn.2095-994X.2016.02.01.03
2016-01-19;
2016-02-27
張誠,碩士研究生,研究方向:男科及循證醫學,E-mail:403058838@qq.com。
張雁鋼,教授,主任醫師,博士,碩士生導師,研究方向:男科及循證醫學,E-mail:urozyg@163.com。
張誠,成建軍,張建東,等.機器人輔助腹腔鏡腎盂成形術與腹腔鏡術式療效和安全性的 Meta分析[J].世界復合醫學,2016,2(1):12-17.
猜你喜歡
腹腔鏡外科雜志(2022年7期)2022-08-16 04:31:06
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
河北畫報(2020年10期)2020-11-26 07:20:50
電子制作(2018年18期)2018-11-14 01:48:24
中國內鏡雜志(2017年2期)2017-03-20 16:18:12
山東工業技術(2016年15期)2016-12-01 05:31:22
腹腔鏡外科雜志(2016年11期)2016-06-01 12:10:09
腹腔鏡外科雜志(2016年9期)2016-06-01 12:10:07
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國中醫藥現代遠程教育(2014年13期)2014-03-01 04:26:36