多功能救火機器人的構建
2016-10-21 09:15:47朱雅喬
中國設備工程 2016年10期
朱雅喬
(天津中德職業技術學院航空航天與汽車學院,天津 300350)
多功能救火機器人的構建
朱雅喬
(天津中德職業技術學院航空航天與汽車學院,天津 300350)
針對火災救援的任務要求,研究了一款多功能救火機器人。基于模塊化思想對機器人的本體、控制系統進行三維設計,進而對硬件平臺進行搭建。通過WiFi控制軟件連接樣機,驅動樣機完成滅火實驗。從實驗結果可知,機器人能滿足設計要求。
救火機器人 ;三維設計 ;樣機實驗
0 引言
目前,火災事故頻發,在災難事故現場亟需監視、監測與監控的載體。一款多功能救火機器人采用履帶運動平臺,具有較強越障能力的,非常適合執行災難現場的搜索與偵查任務,運動平臺搭載隨動視覺系統及機械手,并預留傳感器接口,可采集目標影像及環境信息、完成作業任務,通過WiFi控制模塊與芯片串口通信,實現遠距離控制,為災難救援提供第一手信息。本文基于Pro/E對智能節能救援機器人進行結構設計,基于對機器人硬件及軟件設計,能夠帶來更好的操控體驗,提高工作效率。本機器人機身上設置有溫度傳感器,能夠使機器人根據溫度高低判斷需要滅火的位置,報警器能夠根據溫度高低發出火警警報;同時設置在機身上的攝像頭能夠輔助操作人員獲得滅火現場的環境信息,發送接收器能夠使操作人員實現遠程操作,有效的保護了滅火人員的安全[1-3]。
1 三維建模
1.1移動本體三維建模
本文采用pro/E進行三維建模。機身頂部設置有攝像頭、溫度傳感器、報警器;行走機構;控制器,控制器連接有發送接收器,控制器上與行走電機電連控制行走電機轉動,且控制器接收溫度傳感器溫度信號控制報警器發出警示,發送接收器用以接收控制器發出或接收移動終端的信號。機器人整體采用金屬材料,耐高溫;采用履帶行走機構,提高通過性;機身上裝有散熱裝置,提高機器人的適應性;可旋轉手臂提高滅火工作范圍;溫度、視覺等傳感器的分布提高機器人感知現場的能力。
1.2控制系統三維建模
如圖1所示,控制系統由控制模塊、驅動模塊組成。
2 機器人的硬件系統
MCU處理器——STC11F32XE,作為硬件系統的核心 。驅動板連接路由器并打開路由和驅動板電源,電腦WIFI設置DHCP自動獲得WIFI-Robot無線信號,用WIFI-Robot 專用PC控制工具連接視頻和控制端口,WIFI-Robot就能進行遠程遙控控制和視頻傳輸了。電機驅動芯片為L298系列,能滿足機器人電機需求。電源穩壓系統具有豐富的接口與資源(5路舵機驅動接口;路紅外避障接口;1個TTL串口;1個紅外一體化接收頭;1個直流電源輸入接口,7~15 V范圍輸入;1個5 V電壓輸出接口,標配1 A電流;6路LED可用于系統狀態提示),為機器人功能拓展與延伸提供可能。
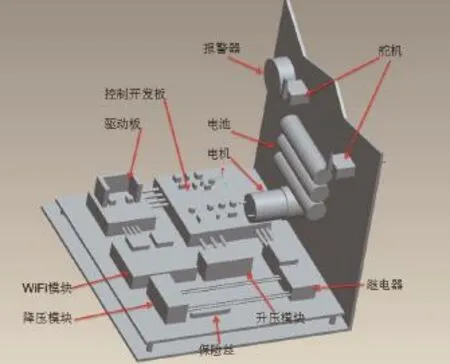
圖1 控制系統布局
硬件系統的搭建:硬件系統搭建,如圖2所示,其重要性不言而喻,最終的目的是盡可能減小機器人實際運動軌跡與期望目標的偏差,達到理想的運動精度。
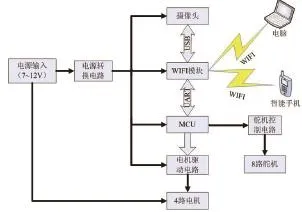
圖2 機器人控制系統
3 機器人樣機
3.1機器人控制軟件
(1)機器人固件:更新方式簡單,在GPL版權協議下使用C語言編寫,并使用GNU bfin-elf-gcc或bfin-uclinux-gcc工具鏈編譯。
(2)板載用戶程序:主板內置C語言解釋器支持專門的機器人類型命令以供用戶程序運行。
(3)開發工具:GNU工具鏈。
(4)控制臺軟件:通過運行于Windows,MAC,Linux平臺上的基于java的應用程序,連接內建于SRV1中的5、WebcamSat服務程序觀看圖像,并允許多人同時通過Internet遠程觀看。
(5)機器人控制協議。圖像處理函數庫。
3.2機器人樣機
機器人樣機如圖3所示。

圖3 機器人樣機
WiFi控制(手機、電腦)、巡線、超聲波壁障、無線視頻傳輸。通過舵機、光耦繼電器控制水泵的開關,達到噴水滅火的目的;通過舵機、水銀開關控制蜂鳴器,達到報警目的;通過舵機控制鋼絲拉桿,達到控制機器手的目的;外加備用電源,通過電容傳感器,達到應急照明的目的。
4 結論
本文基于Pro/E對智能節能救援機器人進行結構設計,基于對機器人硬件及軟件設計,能夠帶來更好的操控體驗,提高工作效率。本機器人機身上設置有溫度傳感器,能夠使機器人根據溫度高低判斷需要滅火的位置,報警器能夠根據溫度高低發出火警警報;同時設置在機身上的攝像頭能夠輔助操作人員獲得滅火現場的環境信息,發送接收器能夠使操作人員實現遠程操作,有效的保護了滅火人員的安全。
[1] 趙娜.移動機械手路徑規劃與控制研究[D].天津:天津理工大學,2006.
[2] 李君.基于旋量理論的Stanford 臂的運動學分析[J].天津科技大學學報,2010,(4):72~78.
[3] 蔡蒂,謝存禧,張鐵,等. 基于蒙特卡洛法的噴涂機器人工作空間分析及仿真[J].機械設計與制造,2009,3:161~162.
TP242
A
1671-0711(2016)08(下)-0084-02
