基于AT89C52的風擺控制系統設計與實現
2016-10-25 06:24:15尚坡利吳寧
甘肅科技縱橫 2016年9期
尚坡利,吳寧
基于AT89C52的風擺控制系統設計與實現
尚坡利1,吳寧2
(1.蘭州石化職業技術學院電子電氣工程系,甘肅蘭州730060;2.蘭州工業學院電氣工程學院,甘肅蘭州730050)
介紹了一種基于AT89C52單片機為控制核心的風擺控制系統,該系統通過調節直流風扇轉速實現對擺桿擺角的實時測量、顯示和控制。系統采用SCA100T-D02角度傳感器來實現對擺桿轉角信號的采集,根據轉角值輸出一定占空比的PWM脈沖波,用L298N作為驅動電路控制風扇電機轉速,以達到控制擺桿轉角的目的,同時在徑向距離大于50cm時可用蜂鳴器報警。該系統經過測試實驗,能耗低,性價比高,具有較高的實際應用價值。
檢測技術與自動化裝置;風擺;AT89C52
0 引言
2015年全國大學生電子設計競賽本科組B題以風力擺控制系統為研究對象,要求所設計系統在規定時間內能夠做出重復自由擺運動,或是可根據要求設定擺動方向,擺動時所附加激光筆能夠畫出直線段;或是將風力擺拉起一定角度放開,規定時間內使風力擺制動達到靜止狀態。本論述基于該競賽題目提出的設計要求,給出一種簡單實用、性價比高,且易于實現的設計方案。
1 總體方案設計
根據題目的要求,本系統需解決以下問題:對風扇電機的轉速進行快速而準確的控制,以保證風扇的轉角短時間穩定在控制范圍內;為保證系統的精度要求,必須要對擺桿擺動角度進行實時檢測及顯示;為保證擺桿達到預定角度還需要相應的設定電路。根據以上要求,其控制模型框圖見圖1所示。
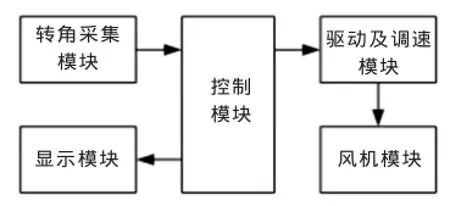
圖1 控制系統模型框圖
2 系統設計
為完成系統控制目標,對各環節模塊進行如下設計。
2.1控制模塊設計
根據題目要求,控制器主要用于傳感器信號的接收與辨認、控制電機轉動、顯示實時角度等。有以下兩種方案:
方案一:采用FPGA作為系統控制器。FPGA可以實現各種復雜的邏輯功能,規模大、密度高、體積小、穩定性高,并且可應用EDA軟件仿真、調試,易于進行功能擴展。但由于其集成度高,使其成本偏高,同時由于芯片的引腳較多,實物硬件電路板布線復雜,加重了電路設計和實際焊接的工作[1]。
方案二:采用AT89C52作為系統控制器[2]。單片機AT89C52是一種帶8K字節內嵌可編程閃存的低功耗高性能的八位微控制器,雙數據指針,具有3個16位定時/計數器,6個兩級中斷源結構,以及掉電模式下的自動保存功能,軟件編程靈活、自由度大,可用軟件編程實現各種算法和邏輯控制,可以達到本系統的要求[3]。
基于以上分析,選擇方案二。
2.2轉角采集模塊設計
方案一:采用MMA7455L芯片。其為XYZ三軸微機電加速度計,可測量三軸方向上工作參數,輸出為8位或10位的數字量,可直接與單片機連接。硬件電路簡單,但成本較高,軟件程序調試較困難[4]。
方案二:采用SCA100T-D02。SCA100T-D02測量范圍為-90°~+90°,具有模擬和數字兩路輸出。模擬量輸出電壓為0~5V,不需信號調理電路就可送入A/D,可采用模擬量輸出,后接AD0809。此方案硬件電路簡單,軟件調試簡單,測量數據穩定[5-6]。
基于以上分析,選擇方案二。
2.3驅動及調速模塊設計
方案一:采用線性放大驅動方式。單片機輸出數字量,經D/A后轉換為連續變化的電壓值,經功率驅動后加在直流風扇電機上。此方式波動小,線性好,對鄰近電路干擾小,但存在效率低和散熱等問題。硬件需要D/ A轉換器,電路復雜,成本高。
方案二:采用PWM調速。PWM調速是使加在直流電機兩端的電壓為方波形式,通過改變方波占空比實現對電機轉速調節,PWM由單片機輸出。采用L298N作為驅動芯片,其內部開關為電子開關,速度很快,穩定性也極強。此方案電路簡單,使用比較方便。
基于以上分析,選擇方案二。其電路原理圖見圖2所示:
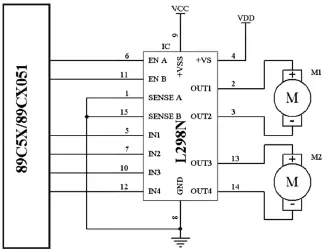
圖2 L298N電機驅動原理圖
2.4顯示模塊設計
方案一:使用傳統的數碼管顯示。數碼管具有低功耗、低損耗、低壓、壽命長、耐老化、防曬、防潮、防火、防高(低)溫,對外界環境要求低,易于維護,操作簡單等特點。數碼管采用BCD編碼顯示數字,程序編譯容易,資源占用較少;但是其不適合顯示字符,且電路復雜。
方案二:使用12864液晶顯示屏顯示。12864液晶顯示屏(LCD)具有輕薄短小、低耗電量、無輻射危險,平面直角顯示以及影像穩定不閃爍等優勢,可視面積大,畫面效果好,分辨率高,抗干擾能力強等特點[7]。
基于以上分析,選擇方案二。
2.5風機模塊設計
方案一:交流風機使用方便,常用于工業控制,但運動精度低,難以實現精確的位置控制。如用交流電機控制風板轉動,將難以控制其精確位置,系統穩定性差,較難達到題目的要求。
方案二:直流電機的運動精度很高,可實現較為精確的運動,由其組成的位置控制系統定位準確,穩定時間短,一般可采用開環控制。直流電機的控制系統必須與其驅動控制器匹配使用,控制起來也十分方便。
基于以上分析,選擇方案二。
根據上述分析,設計出系統硬件方案,由SCA100T-D02采集轉角信息后送入ADC0809轉換,輸出的8位數字量送入AT89C52中,單片機經分析處理后輸出一定占空比的PWM,經L298N功率驅動放大后控制電機轉速,同時可用按鍵設定擺桿轉角并顯示[8]。
2.6程序流程圖
根據系統控制要求,可設計主流程見圖3所示:
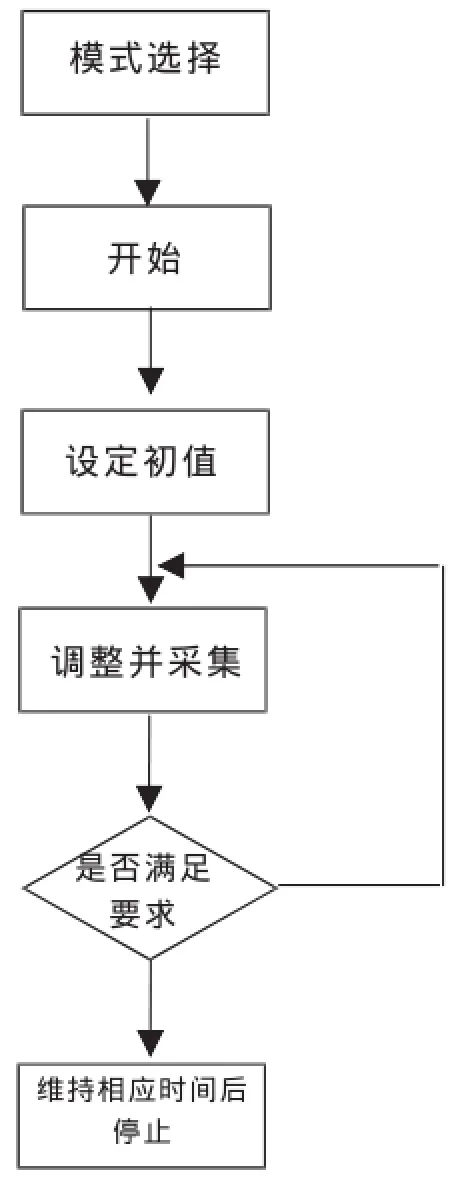
圖3 系統主流程圖
3 測試結果分析
通過測試結果得出,當帆板角度從0°~60°范圍變化時,當角度小于20°時,控制較易,誤差較小;當角度接近60°時,控制時間明顯增加,精度存在一定誤差。當控制角度在30°~50°時,誤差小,控制時間短,調節參數符合標準要求。本設計方案可基本滿足設計要求,下一步可通過改進硬件及軟件設計方案達到更高控制目標。
[1]吳厚航.深入淺出玩轉FPGA[M].北京:北京航空航天大學出版社,2013.
[2]凌志浩.AT89C52單片機原理與接口技術[M].北京:高等教育出版社,2011.
[3]黃智偉.全國大學生電子設計競賽訓練教程[M].北京:電子工業出版社,2010.
[4]谷云高,石彥君,周曉靜,等.基于MMA7455的機器人姿態控制系統的研究[J].制造業自動化,2010,32(08):15-17.
[5]孫汝建.基于SPI接口的雙軸SCA100T傾角傳感器及其應用方法[J].儀器儀表用戶,2006,13(4):69-71.
[6]王盛軍,邵瓊玲.基于SCA100T和MCU數字傾角傳感器的設計與實現[J].微計算機信息,2010,26(22):90-91.
[7]張新強.點陣LCD驅動顯控原理與實踐[M].北京:北京航空航天大學出版社,2010.
[8]朱清.基于單片機控制的人機界面應用研究[J].工業控制計算機,2009,22(12):5+7.
TP273;TP368.1
A
10.3969/j.issn.1672-6375.2016.09.012
2016-7-10
尚坡利(1984-),女,漢族,河南汝州人,研究生,助教,主要研究方向:電力系統及其自動化、智能電網、智能控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
