具有輸出耦合的Lur'e復雜網絡的自適應輸出反饋牽制控制
2016-10-25 02:46:59李紹林何應輝
紅河學院學報 2016年5期
李紹林,何應輝,劉 偉
(紅河學院數學學院,云南蒙自 661199)
具有輸出耦合的Lur'e復雜網絡的自適應輸出反饋牽制控制
李紹林,何應輝,劉偉
(紅河學院數學學院,云南蒙自 661199)
文章應用自適應控制技術并結合牽制控制的思想,在節點部分輸出狀態的情況下討論具有輸出耦合的無向Lur'e復雜網絡的同步問題。通過對網絡中部分節點引入控制器,設計輸出反饋增益的在線自適應更新協議,無向Lur'e復雜網絡中所有節點能實現全局漸近輸出同步。最后,利用無標度BA網絡作為數值實例驗證了所提出理論結果的有效性。
同步;自適應更新協議;牽制控制;Lur'e復雜網絡;輸出耦合
0 引言
Lur'e系統是一類非常典型的非線性系統,通常它由一個線性系統和一個滿足扇區條件的非線性反饋系統所構成,一些常見的非線性系統如Chua系統、Goodwin模型及超混沌系統等都可以歸結為Lur'e的類型. 在理論上,Lur'e系統的穩定性問題一直是研究的熱點之一并產生了一些比較有影響力的結果[1-3]. Lur'e系統的同步問題也廣泛應用于諸如保密通信等工程技術領域[4-5].
復雜網絡是一個由大量節點和節點之間的連接關系所構成的系統,它在自然和人類日常生活中常用來作為如生物網絡、社交網絡和物流網等的數學模型. 同步現象是動態復雜網絡的動力學行為之一,已經得到國內外不同學科領域學者的廣泛關注和研究[6-8]. 由于復雜網絡的特性之一就是節點數目比較多,為網絡中每一個節點施加控制行為既不合理而且也難以實現. 牽制控制[9-12]被廣泛應用于復雜網絡的同步研究中,其特點在僅控制網絡中的一小部分節點就能實現網絡所有節點的同步,因此是一種較為有效而且低成本控制方法.
在大多數已有的文獻中,復雜網絡的同步判據往往是基于節點的所有狀態(full states)所給出的.但由于測量手段和觀測設備等人為因素的限制,獲取節點的全部狀態是不容易實現的. 在此情況下,僅利用節點的部分輸出狀態來實現整個網絡的輸出同步[13-15]的控制方法已經得到了廣泛的關注和研究.在文獻[16]中,Liu等人基于輸出反饋控制策略研究了一個Lur'e動力學網絡的牽制同步問題,利用LMIs的形式給出了有向和無向Lur'e網絡的同步判據. 我們在此基礎上,考慮了無向Lur'e網絡的自適應輸出牽制同步問題并設計了牽制控制器增益的自適應更新協議,該協議只依賴于牽制節點的狀態誤差從而便于實際應用. 數值仿真的結果表明所設計自適應牽制控制器的有效性,特別指出在網絡強連通和Lur'e系統可檢測的條件下,即使只采用一個控制器也能實現整個網絡的狀態同步.
1 預備知識與模型描述
1.1符號說明
在本文中,我們使用如下的標準數學符號.R 代表實數集,Rn表示n 維的實歐式空間.記Rm×n為所有m 行n 列的實矩陣的全體,In表示n階的單位矩陣.對于n 階方陣A∈Rn×n記號AT表示矩陣A的轉置,A-1表示矩陣A 的逆矩陣.對于一個實對稱矩陣B ,分別記λmax(B)與λmin(B)為矩陣B的最大與最小特征值,記號B>0(B<0)表示對稱矩陣B 是正定(負定)矩陣.記號diag(d1,d2,…,dn)表示主對角元素為d1,d2,…,dn的對角矩陣.記號?表示矩陣運算的Kronecker積.
1.2圖論知識
無向網絡中的信息交換可以用一個加權圖g={V,E,W}來表示,這里V={1,2,…,N}是網絡中節點的集合;邊集E?V×V ,無序自然數對(i,j)∈E 表示網絡節點i 與節點j能夠進行信息交換,否則(i,j)?E 表示節點與節點j無法進行信息交換;加權聯接矩陣W 中的元素ij用于衡量節點i 與節點j 之間的通信質量,定義為


這里,不允許節點到它自身的通信(即不存在自環的情形),因此,對應于加權聯接矩陣的Laplacian矩陣定義為

1.3基本引理
下面的引理是本文進行理論證明所需要的,在此先作一個簡要的陳述.
引理1[17]設是實對稱矩陣,那么任取則有

引理2[18]設矩陣,則下列線性矩陣不等式(LMI)

成立,當且僅當下列條件其中一個成立:

引理3[19]如果是不可約矩陣,滿足如下條件:
引理4[20]對于具有適當維數的矩陣及數,有如下關于Kronecker積的等式成立:


1.4模型描述

對于Lur'e復雜網絡(1),考慮其孤立節點的動力學方程為

定義 Lur'e復雜網絡(1)與孤立節點(2)全局漸近同步,是指在任意初始條件下都成立

當系統(1)本身無法實現與孤立節點(2)全局漸近同步時,對系統施加控制是一種最為常用的手段. 為此,對系統(1)引入控制輸入,即考慮如下的受控系統:

在實際網絡中,節點的數目往往是非常多,受控制成本的限制,對每一個節點都施加控制是不現實和無法實施的,為此我們引入牽制控制(Pinning Control)的策略,也就是說在網絡中一小部分節點上施加控制. 記

分別為全部和牽制的節點集合. 在本文中,我們設計如下的牽制時變輸出反饋控制器



這里,特別指出正定矩陣P將用于受控系統(3)中輸出反饋增益矩陣Γ的設計.

此外,由(2),(3)和(4)式可得如下的同步誤差系統

根據以上討論,受控系統(3)與孤立節點(2)全局漸近同步問題可轉化為誤差系統(8)在平凡零解的全局漸近穩定問題.
2 牽制策略下無向Lur'e網絡的自適應同步協議


利用上述正定矩陣P ,構造如下的Lyapunov函數

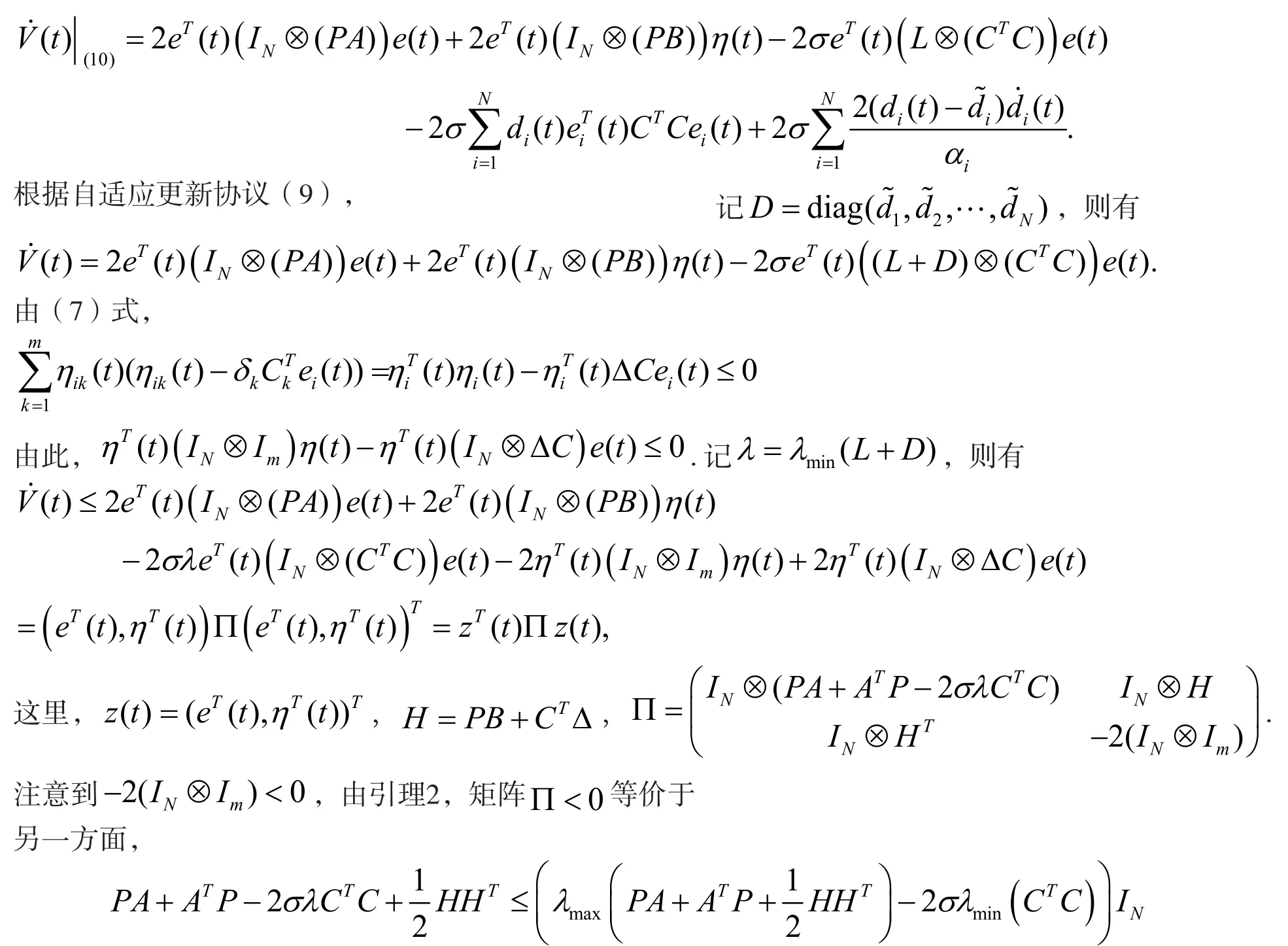


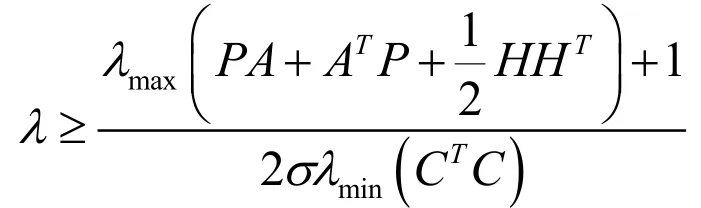
則有


綜上所述,誤差系統(10)能實現全局漸近穩定,從而受控系統(3)在所設計的自適應更新協議(9)下與孤立節點(2)達到全局漸近同步,控制器的時變反饋增益將漸近穩定于某一確定數值,定理得證.
3 數值仿真
在本節中,通過設計一個數值仿真實例來說明所提出理論結果的有效性。考慮如下由100個節點所構成,形如(3)式的一個Lur'e復雜網絡模型:



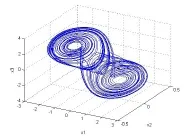
圖1 單個節點的狀態的混沌狀態

圖2 由100個節點構成的無標度網絡

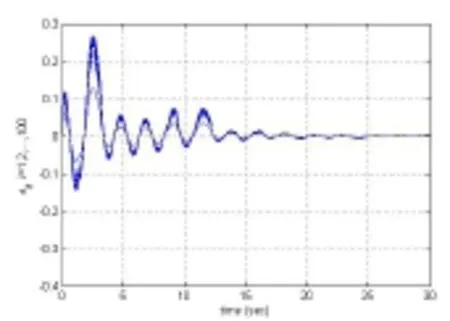
圖3 網絡節點狀態誤差ei1(t )
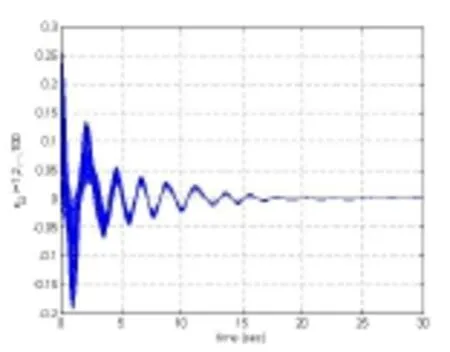
圖4 網絡節點狀態誤差ei1(t )

圖5 網絡節點狀態誤差ei1(t )

圖6 隨機選取兩個節點的控制器增益ei1(t )
4 結論
在本文中,我們考慮了無向Lur'e復雜網絡自適應輸出同步問題. 根據牽制控制的思想,僅將控制器配置在網絡節點中的一小部分上以實現整個網絡的輸出同步. 在實現網絡節點同步的過程中,我們利用牽制時變輸出反饋控制器代替傳統的反饋控制器并設計了相應反饋增益的在線自適應更新協議,由系統同步誤差所決定的反饋控制增益可以有效地避免人為選取,從而能達到有效地降低控制成本. 通過Lyapunov函數方法和LaSalle不變集原理,我們從理論上嚴格證明了所設計的自適應方案的合理性,在無標度BA網絡上數值仿真則說明了理論結果有效性.在自然環境下,時滯以及噪聲的干擾對于一個網絡來說是不可避免的,在Lur'e復雜網絡中考慮上述因素所帶來的影響則會是一個非常有意義的研究主題,這也是我們將來致力于考慮的研究內容.
[1]Park P. A revisited Popov criterion for nonlinear Lur'e systems with sector-restrictions[J].International Journal of Control,1997,68(3): 461-470.
[2]魯仁全,蘇宏業,褚健.一類Lur'e系統新的絕對穩定性與絕對二次鎮定條件[J].浙江大學學報(工學版),2004,38(2):129-134.
[3]孫繼濤,吳啟迪.Lur'e系統穩定與同步的脈沖控制[J].應用數學和力學,2004,25(3):291-296.
[4]張靜.不確定時滯Lur'e控制系統的魯棒指數穩定和觀測器設計[D].遼寧:東北大學,2012.
[5]J.Lu,J.Cao and Ho D W C. Adaptive stabilization and synchronization for chaotic Lur'e systems with time-varying delay[J].IEEE Transactions on Circuits and Systems I: Regular Papers,2008,55(5):1347-1356.
[6]J. Lü,G. Chen. A time-varying complex dynamical network model and its controlled synchronization criteria[J].IEEE Transactions on Automatic Control,2005,50(6): 841-846.
[7]J. Zhou,J. Lu J,J. Lü. Pinning adaptive synchronization of a general complex dynamical network[J].Automatica,2008,44(4):996-1003.
[8]鄭海青,井元偉,劉曉平.一類具有多種耦合時滯的復雜動態網絡的牽制同步[J].控制與決策,2010,25(11):1719-1722.
[9]W.Yu,G. Chen G,J. Lü. On pinning synchronization of complex dynamical networks[J].Automatica,2009,45(2):429-435.
[10]R. Cheng,M. Peng,W. Yu. Pinning synchronization of delayed complex dynamical networks with nonlinear coupling[J]. Physica A: Statistical Mechanics and its Applications,2014,413: 426-431.
[11]宋海裕,俞立,胡鴻翔.牽制控制下的的多多智能體系統群一致性[J].控制理論與應用,2012,6:11.
[12]鞏長忠,張瑜.基于牽制控制的變時滯復雜網絡自適應同步[J].渤海大學學報(自然科學版),2014,35(4):336-341.
[13]N.Chopra.Output synchronization on strongly connected graphs[J].IEEE Transactions on Automatic Control,2012,57(11):2896-2901.
[14]J.Wang,H.Wu.Local and global exponential output synchronization of complex delayed dynamical networks[J]. Nonlinear Dynamics,2012,67(1):497-504.
[15]H.Yu,P.Antsaklis.Output synchronization of networked passive systems with event-driven communication[J].Automatic Control,IEEE Transactions on,2014,59(3):750-756.
[16]F.Liu,Q.Song and J.Cao,et al.Pinning Lur'e Complex Networks via Output Feedback Control[J].Mathematical Problems in Engineering,2014.
[17]R.Horn,C.Johnson.Matrix analysis[M].England:Cambridge university press,2012.
[18]S.Boyd,El Ghaoui,E.Feron and V.Balakrishnan.Linear Matrix Inequalities in System and Control Theory[M].SIAM,1994.
[19]T.Chen,X.Liu and W.Lu.Pinning Complex Networks by a Single Controller[J]. IEEE Transactions on Circuits and Systems I:Regular Papers,2007,54(6):1317-1326.
[20]R.Horn,R.Johnson.Matrix analysis[M].England:Cambridge University Press,UK,2012.
[責任編輯 張燦邦]
Pinning Control for Lur'e Complex Network with Output Coupling via Adaptive Output Feedback Technique
LI Shao-lin,HE Ying-hui,LIU Wei
(Department of Mathematics and Applied Mathematics,Honghe University,Mengzi 661199,Yunnan,China)
Using adaptive technique and pinning control,the synchronization of undirected Lur'e network with output coupling is investigated,in which only part of nodes' states are known. For the purpose of synchronize all nodes to homogeneous state,an adaptive online update protocol that is dependent on output feedback is designed and applied to a fraction of nodes in Lur'e complex network. Finally,based on scale-free BA network,a numerical simulation is provided to demonstrate the effectiveness of the theoretical result.
Synchronization; Adaptive update protocol; Pinning control; Lur'e complex network; Output coupling
O29
A
1008-9128(2016)05-0060-06
10.13963/j.cnki.hhuxb.2016.05.017
2015-09-10
紅河學院校級科研基金項目(XJ15SX03)
李紹林(1977-),男,云南石屏人,副教授,碩士,研究方向:復雜網絡。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
